Проекция точки на прямую онлайн
С помощю этого онлайн калькулятора можно найти проекцию точки на прямую. Дается подробное решение с пояснениями. Для вычисления проекции точки на прямую, задайте размерность (2-если рассматривается прямая на плоскости, 3- если рассматривается прямая в пространстве), введите координаты точки и элементы уравнения в ячейки и нажимайте на кнопку «Решить».
Предупреждение
Инструкция ввода данных. Числа вводятся в виде целых чисел (примеры: 487, 5, -7623 и т.д.), десятичных чисел (напр. 67., 102.54 и т.д.) или дробей. Дробь нужно набирать в виде a/b, где a и b (b>0) целые или десятичные числа. Примеры 45/5, 6.6/76.4, -7/6.7 и т.д.
Проекция точки на прямую − теория, примеры и решения
Рассмотрим эту задачу в двухмерном и трехмерном пространствах.
1. Пусть в двухмерном пространстве задана точка M0(x0, y0) и прямая L:
 , , | (1) |
где q=(m,p) направляющий вектор прямой L.
Найдем проекцию точки M0 на прямую (1)(Рис.1).
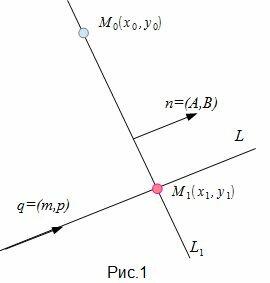 |
Алгоритм нахождения проекции точки на прямую L содержит следующие шаги:
- построить прямую L1, проходящую через точку M0 и перпендикулярную прямой L,
- найти пересечение прямых L и L1(точка M1)
Уравнение прямой, проходящей через точку M0(x0, y0) имеет следующий вид:
| A(x−x0)+B(y−y0)=0 | (2) |
Как видно из рисунка Рис.1, для того, чтобы прямая L1 была перпендикулярна прямой L нужно , чтобы направляющий вектор q прямой L была коллинеарна нормальному вектору n прямой L1, поэтому в качестве нормального вектора прямой L1 достаточно взять направляющий вектор прямой L. Тогда уравнение прямой L1, представленной уравнением (2) можно записать так:
| m(x−x0)+p(y−y0)=0 | (3) |
| mx+py−mx0−py0=0 | (4) |
Для нахождения точки пересечения прямых L и L1, которая и будет проекцией точки M0 на прямую L, можно решить систему из двух уравнений (1) и (3) с двумя неизвестными x и y. Выражая неизвестную x из одного уравнения и подставляя в другое уравнение получим координаты точки M1(x1, y1).
Найдем точку пересечения прямых L и L1 другим методом.
Выведем параметрическое уравнение прямой (1):
 |
 | (5) |
Подставим значения x и y в (4):
| m(mt+x’)+p(pt+y’)−mx0−py0=0 |
| m 2 t+mx’+p 2 t+py’−mx0−py0=0 |
 | (5′) |
Мы нашли такое значение t=t’, при котором координаты x и y точки на прямой L удовлетворяют уравнению прямой L1(4). Следовательно, подставляя значение t’ в (5) получим координаты проекции точки M0 на прямую L:
Пример 1. Найти проекцию точки M0(1, 3) на прямую
 | (6) |
Направляющий вектор прямой (6) имеет вид:
Т.е. m=4, p=5. Из уравнения прямой (6) видно, что она проходит через точку M’ (x’, y’)=(2, −3)(в этом легко убедится − подставляя эти значения в (6) получим тождество 0=0), т.е. x’=2, y’=-3. Подставим значения m, p, x0, y0, x’, y’ в (5′):
 |
 |
Подставляя значение t в (5), получим:
 , , |
 . . |
Проекцией точки M0(1, 3) на прямую (6) является точка:
 |
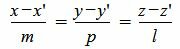 , , | (7) |
где q=(m, p, l) направляющий вектор прямой L.
Найдем проекцию точки M0 на прямую (7)(Рис.2).
 |
Нахождение проекцию точки на прямую L содержит следующие шаги:
- построить плоскость α, проходящую через точку M0 и перпендикулярную прямой L,
- найти пересечение плоскости α и прямой L(точка M1)
| A(x−x0)+B(y−y0)+C(z−z0)=0 | (8) |
где n=(A,B,C) нормальный вектор плоскости α.
Как видно из рисунка Рис.2, для того, чтобы плоскость α была перпендикулярна прямой L нужно , чтобы направляющий вектор q прямой L была коллинеарна нормальному вектору n плоскости α, поэтому в качестве нормального вектора плоскости α достаточно взять направляющий вектор прямой L. Тогда уравнение плоскости α, представленной уравнением (8) можно записать так:
| m(x−x0)+p(y−y0)+l(z−z0)=0 |
| mx+py+lz−mx0−py0−lz0=0 | (9) |
Для нахождения точки пересечения плоскости α и прямой L, которая и будет проекцией точки M0 на прямую L, выведем параметрическое уравнение прямой (7):
 |
 | (10) |
Подставим значения x и y в (9):
| m(mt+x’)+p(pt+y’)+l(lt+z’)−mx0−py0−lz0=0 |
| m 2 t+mx’+p 2 t+py’+l 2 t+ly’−mx0−py0−lz0=0 |
 | (10′) |
Мы нашли такое значение t=t’, при котором координаты x,y и z точки на прямой L удовлетворяют уравнению плоскости (9). Следовательно, подставляя значение t’ в (10) получим координаты проекции точки M0 на прямую L:
| M1(x1, y1, , z1), |
Пример 2. Найти проекцию точки M0(3, −1, −2) на прямую
 | (11) |
Направляющий вектор прямой (11) имеет вид:
Т.е. m=2, p=3, l=−4. Из уравнения прямой (11) видно, что она проходит через точку M’ (x’, y’, z’)=(2, 1, 1)(в этом легко убедится − подставляя эти значения в (11) получим тождество 0=0=0), т.е. x’=2, y’=1, z’=1. Подставим значения m, p, l x0, y0, z0 x’, y’, z’ в (10′):
 |
 |
 |
Подставляя значение t=t’ в (10), получим:
 . . |
 . . |
 . . |
Проекцией точки M0(3, −1, −2) на прямую (11) является точка:
Проекция точки на прямую, координаты проекции точки на прямую
Данная статья рассматривает понятие проекции точки на прямую (ось). Мы дадим ему определение с использованием поясняющего рисунка; изучим способ определения координат проекции точки на прямую (на плоскости или в трехмерном пространстве); разберем примеры.
Проекция точки на прямую, определение
В статье «Проекция точки на плоскость, координаты» мы упоминали, что проецирование фигуры является обобщенным понятием перпендикулярного или ортогонального проецирования.
Все геометрические фигуры состоят из точек, соответственно проекция этой фигуры есть множество проекций всех ее точек. Поэтому, чтобы иметь возможность спроецировать фигуру на прямую, необходимо получить навык проецирования точки на прямую.
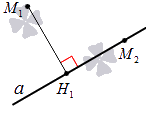
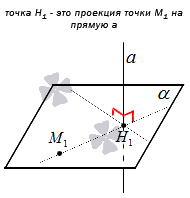
Проекция точки на прямую – это или сама точка, если она принадлежит заданной прямой, или основание перпендикуляра, опущенного из этой точки на заданную прямую.
Рассмотрим рисунок ниже: точка H 1 служит проекцией точки М 1 на прямую a , а точка М 2 , принадлежащая прямой, является проекцией сама себя.
Данное определение верно для случая на плоскости и в трехмерном пространстве.
Чтобы на плоскости получить проекцию точки М 1 на прямую a , проводится прямая b , проходящая через заданную точку M 1 и перпендикулярная прямой a . Таким образом, точка пересечения прямых a и b будет проекцией точки М 1 на прямую a .

В трехмерном пространстве проекцией точки на прямую будет служить точка пересечения прямой a и плоскости α , проходящей через точку М 1 и перпендикулярной прямой a .
Нахождение координат проекции точки на прямую
Рассмотрим данный вопрос в случаях проецирования на плоскости и в трехмерном пространстве.
Пусть нам заданы прямоугольная система координат O x y , точка М 1 ( x 1 , y 1 ) и прямая a . Необходимо найти координаты проекции точки М 1 на прямую a .
Проложим через заданную точку М 1 ( x 1 , y 1 ) прямую b перпендикулярно прямой a . Точку пересечения маркируем как H 1 . Точка Н 1 будет являться точкой проекции точки М 1 на прямую a .
Из описанного построения можно сформулировать алгоритм, который позволяет находить координаты проекции точки М 1 ( x 1 , y 1 ) на прямую a :
— составляем уравнение прямой (если оно не задано). Для совершения этого действия необходим навык составления основных уравнений на плоскости;
— записываем уравнение прямой b (проходящей через точку М 1 и перпендикулярной прямой a ). Здесь поможет статья об уравнении прямой, проходящей через заданную точку перпендикулярно заданной прямой;
— определяем искомые координаты проекции как координаты точки пересечения прямых a и b . Для этого решаем систему уравнений, составляющие которой – уравнения прямых a и b .
На плоскости O x y заданы точки М 1 ( 1 , 0 ) и прямая a (общее уравнение – 3 x + y + 7 = 0 ). Необходимо определить координаты проекции точки М 1 на прямую a .
Решение
Уравнение заданной прямой известно, поэтому, согласно алгоритму, переходим к шагу записи уравнения прямой b . Прямая b перпендикулярна прямой a , а значит нормальный вектор прямой a служит направляющим вектором прямой b . Тогда направляющий вектор прямой b запишем как b → = ( 3 , 1 ) . Запишем и каноническое уравнение прямой b , поскольку нам также заданы координаты точки М 1 , через которую проходит прямая b :
Заключительным шагом определяем координаты точки пересечения прямых a и b . Перейдем от канонических уравнений прямой b к общему ее уравнению:
x — 1 3 = y 1 ⇔ 1 · ( x — 1 ) = 3 · y ⇔ x — 3 y — 1 = 0
Составим систему уравнений из общих уравнений прямых a и b и решим ее:
3 x + y + 7 = 0 x — 3 y — 1 = 0 ⇔ y = — 3 x — 7 x — 3 y — 1 = 0 ⇔ y = — 3 x — 7 x — 3 · ( — 3 x — 7 ) — 1 = 0 ⇔ ⇔ y = — 3 x — 7 x = — 2 ⇔ y = — 3 · ( — 2 ) — 7 x = — 2 ⇔ y = — 1 x = — 2
В конечном итоге мы получили координаты проекции точки М 1 ( 1 , 0 ) на прямую 3 x + y + 7 = 0 : ( — 2 , — 1 ) .
Ответ: ( — 2 , — 1 ) .
Подробнее рассмотрим случай, когда необходимо определить координаты проекции заданной точки на координатные прямые и параллельные им прямые.
Пусть заданы координатные прямые O x и O y , а также точка М 1 ( x 1 , y 1 ) . Понятно, что проекцией заданной точки на координатную прямую O x вида y = 0 будет точка с координатами ( x 1 , 0 ) . Так и проекция заданной точки на координатную прямую O y будет иметь координаты 0 , y 1 .
Любую произвольную прямую, параллельную оси абсцисс, возможно задать неполным общим уравнением B y + C = 0 ⇔ y = — C B , а прямую, параллельную оси ординат — A x + C = 0 ⇔ x = — C A.
Тогда проекциями точки М 1 ( x 1 , y 1 ) на прямые y = — C B и x = — C A станут точки с координатами x 1 , — C B и — C A , y 1 .
Определите координаты проекции точки М 1 ( 7 , — 5 ) на координатную прямую O y , а также на прямую, параллельную прямой O y 2 y — 3 = 0 .
Решение
Запишем координаты проекции заданной точки на прямую O y : ( 0 , — 5 ) .
Запишем уравнение прямой 2 y — 3 = 0 в виде y = 3 2 . Становится видно, что проекция заданной точки на прямую y = 3 2 будет иметь координаты 7 , 3 2 .
Ответ: ( 0 , — 5 ) и 7 , 3 2 .
Пусть в трехмерном пространстве заданы прямоугольная система координат O x y z , точка М 1 ( x 1 , y 1 , z 1 ) и прямая a . Найдем координаты проекции точки М 1 на прямую a .
Построим плоскость α , проходящую через точку М 1 и перпендикулярную прямой a . Проекцией заданной точки на прямую a станет точка пересечения прямой a и плоскости α . Исходя из этого, приведем алгоритм для нахождения координат проекции точки М 1 ( x 1 , y 1 , z 1 ) на прямую a :
— запишем уравнение прямой а (если оно не задано). Для решения этой задачи необходимо ознакомиться со статьей об уравнениях прямой в пространстве;
— составим уравнение плоскости α , проходящей через точку М 1 и перпендикулярной прямой a (см. статью «Уравнение плоскости, проходящей через заданную точку перпендикулярно заданной прямой»);
— найдем искомые координаты проекции точки М 1 ( x 1 , y 1 , z 1 ) на прямую a – это будут координаты точки пересечения прямой α и плоскости α (в помощь – статья «Координаты точки пересечения прямой и плоскости»).
Задана прямоугольная система координат O x y z , и в ней – точка М 1 ( 0 , 1 , — 1 ) и прямая a . Прямой a соответствуют канонические уравнения вида: x + 2 3 = y — 6 — 4 = z + 1 1 . Определите координаты проекции точки М 1 на прямую a .
Решение
Используем указанный выше алгоритм. Уравнения прямой a известны, поэтому первый шаг алгоритма пропускаем. Запишем уравнение плоскости α . Для этого определим координаты нормального вектора плоскости α . Из заданных канонических уравнений прямой a выделим координаты направляющего вектора этой прямой: ( 3 , — 4 , 1 ) , который будет являться нормальным вектором плоскости α , перпендикулярной прямой a . Тогда n → = ( 3 , — 4 , 1 ) – нормальный вектор плоскости α . Таким образом, уравнение плоскости α будет иметь вид:
3 · ( x — 0 ) — 4 · ( y — 1 ) + 1 · ( z — ( — 1 ) ) = 0 ⇔ 3 x — 4 y + z + 5 = 0
Теперь найдем координаты точки пересечения прямой а и плоскости α, для этого используем два способа:
- Заданные канонические уравнения позволяют получить уравнения двух пересекающихся плоскостей, определяющих прямую a :
x + 2 3 = y — 6 — 4 = z + 1 1 ⇔ — 4 · ( x + 2 ) = 3 · ( y — 6 ) 1 · ( x + 2 ) = 3 · ( z + 1 ) 1 · ( y — 6 ) = — 4 · ( z + 1 ) ⇔ 4 x + 3 y — 10 = 0 x — 3 z — 1 = 0
Чтобы найти точки пересечения прямой 4 x + 3 y — 10 = 0 x — 3 z — 1 = 0 и плоскости 3 x — 4 y + z + 5 = 0 , решим систему уравнений:
4 x + 3 y — 10 = 0 x — 3 z — 1 = 0 3 x — 4 y + z + 5 = 0 ⇔ 4 x + 3 y = 10 x — 3 z = 1 3 x — 4 y + z = — 5
В данном случае используем метод Крамера, но возможно применить любой удобный:
∆ = 4 3 0 1 0 — 3 3 — 4 1 = — 78 ∆ x = 10 3 0 1 0 — 3 — 5 — 4 1 = — 78 ⇒ x = ∆ x ∆ = — 78 — 78 = 1 ∆ y = 4 10 0 1 1 — 3 3 — 5 1 = — 156 ⇒ y = ∆ y ∆ = — 156 — 78 = 2 ∆ z = 4 3 10 1 0 1 3 — 4 — 5 = 0 ⇒ z = ∆ z ∆ = 0 — 78 = 0
Таким образом, проекцией заданной точки на прямую a является точка c координатами ( 1 , 2 , 0 )
- На основе заданных канонических уравнений легко записать параметрические уравнения прямой в пространстве:
x + 2 3 = y — 6 — 4 = z + 1 1 ⇔ x = — 2 + 3 · λ y = 6 — 4 · λ z = — 1 + λ
Подставим в уравнение плоскости, имеющее вид 3 x — 4 y + z + 5 = 0 , вместо x , y и z их выражения через параметр:
3 · ( — 2 + 3 · λ ) — 4 · ( 6 — 4 · λ ) + ( — 1 + λ ) + 5 = 0 ⇔ 26 · λ = 0 ⇔ λ = 1
Вычислим искомые координаты точки пересечения прямой a и плоскости α по параметрическим уравнениям прямой a при λ = 1 :
x = — 2 + 3 · 1 y = 6 — 4 · 1 z = — 1 + 1 ⇔ x = 1 y = 2 z = 0
Таким образом, проекция заданной точки на прямую a имеет координаты ( 1 , 2 , 0 )
Ответ: ( 1 , 2 , 0 )
Напоследок отметим, что проекциями точки М 1 ( x 1 , y 1 , z 1 ) на координатные прямые O x , O y и O z буду являться точки с координатами ( x 1 , 0 , 0 ) , ( 0 , y 1 , 0 ) и ( 0 , 0 , z 1 ) соответственно.
Способы проецирования
Содержание:
Система обозначений
С целью отделения групп геометрических объектов введены такие символические обозначения:
- – точки обозначаются большими буквами латинского алфавита А, В, С, . или натуральными числами
 …, в том числе начало отсчёта О,основа перпендикуляра N; точки пересечения линии с линией, плоскостью, поверхностью K, M, N; следы прямой H, F, Р;узловые и вспомогательные точки…;
…, в том числе начало отсчёта О,основа перпендикуляра N; точки пересечения линии с линией, плоскостью, поверхностью K, M, N; следы прямой H, F, Р;узловые и вспомогательные точки…; - – невидимые точки по необходимости обозначаются в круглых скобках: (А), () и т.д.;
- – отрезки прямых и дуги кривых линий складываются из комбинации двух больших букв, которые обозначают начало и конец: АВ, ВС, DE и т.д.;
- – прямые и кривые линии, лучи обозначаются маленькими буквами латинского алфавита a, b,c, …, в том числе прямые уровня h, f, p; проецирующие прямые u, v, w;проецирующие оси вращения i, j, k;прямая, перпендикулярная другой прямой или плоскости,– п; оси прямоугольной системы координат х, у, z; оси вспомогательной системы координат s; оси натурального трёхгранника τ, n, b;
- – углы между прямыми, прямой и плоскостью, двумя плоскостями обозначаются маленькими греческими буквами α, β, γ, …;
- – плоскости и их отсеки, кривые поверхности и пространственные тела обозначаются большими буквами греческого алфавита Σ, Φ, Ω, …, в том числе плоскости проекций П,плоскости проекций прямоугольной системы координатвспомогательные плоскости проекций, перпендикулярные к одной из основных,плоскости проекций при аксонометрическом и косоугольном проецировании П /;
- – следы плоскости Σ обозначаются
- – проекции геометрического объекта на плоскости проекций обозначаются нижним или верхним индексом: или
- – элемент множества одноимённых геометрических объектов обозначается верхним индексом в круглых скобках:
 …, в том числе начало отсчёта О,основа перпендикуляра N; точки пересечения линии с линией, плоскостью, поверхностью K, M, N; следы прямой H, F, Р;узловые и вспомогательные точки
…, в том числе начало отсчёта О,основа перпендикуляра N; точки пересечения линии с линией, плоскостью, поверхностью K, M, N; следы прямой H, F, Р;узловые и вспомогательные точки …;
…; ) и т.д.;
) и т.д.; вспомогательные плоскости проекций, перпендикулярные к одной из основных,
вспомогательные плоскости проекций, перпендикулярные к одной из основных, плоскости проекций при аксонометрическом и косоугольном проецировании П /;
плоскости проекций при аксонометрическом и косоугольном проецировании П /;
 или
или 

Символы латинского и греческого алфавитов приведены в приложении А

Проецирование точки, прямой, плоскости
Проекция точки определяется как пересечение плоскости (гиперплоскости), содержащей эту точку и параллельную плоскости, задающей проекцию. В случае, когда плоскость (гиперплоскость), задающая проекцию, ортогональна прямой, мы получаем ортогональную проекцию (это может быть её альтернативным определением).
Способы проецирования
Известны два метода проецирования: центральное и параллельное.
Проецирование (лат. Projicio – бросаю вперёд) – процесс получения изображения предмета (пространственного объекта) на какой-либо поверхности с помощью световых или зрительных лучей (лучей, условно соединяющих глаз наблюдателя с какой-либо точкой пространственного объекта), которые называются проецирующими.
Центральное проецирование
Для изображения геометрических объектов на плоскости применяют процедуру проецирования, которая состоит в проведении через точку А луча l и дальнейшем определении точки A1 его пересечения с плоскостью проецирования П1 (рис. 1.1 а). Полученная точка А1 называется проекцией точки А на плоскость П1.

 Центральное проецирование
Центральное проецирование
В центральном проецировании лучи, пронизывающие точки тела, «выходят» из одной точки S – центра проецирования (рис. 1.1 б). Разновидностями центрального проецирования являются угловая (рис. 1.2 а) и фронтальная (рис. 1.2 б) перспективы.

 Разновидности перспективы
Разновидности перспективы
Центральное проецирование характеризуется положением центра проецирования
Центральная проекция предмета схожа с изображением, которое воспринимает глаз человека, а также с изображением, полученным посредством фотографии. Этот способ проецирования является наиболее наглядным (способствует зрительному восприятию предметов), но наиболее сложным в своей реализации. Он применяется преимущественно в живописи, строительстве и архитектуре.
Параллельное проецирование
Косоугольное проецирование
Параллельное проецирование можно рассматривать как отдельный случай центрального проецирования, для которого центр S бесконечно удалён от плоскости П1. В этом случае лучи, пронизывающие каждую точку тела, взаимно параллельны (рис. 1.3).
В отличие от центрального, параллельное проецирование характеризуется ориентацией лучей относительно плоскости проекций.
В случае, когда лучи не перпендикулярны к плоскости П1, проецирование называется косоугольным (рис. 1.3).

 Косоугольное проецирование
Косоугольное проецирование
Косоугольное проецирование используется преимущественно для решения специальных задач на определение точек и линий пересечения геометрических фигур. При этом, как правило, плоскость проекции занимает особое положение относительно системы трёх взаимно перпендикулярных плоскостей (см. п. 2.5).
Ортогональное проецирование
Ортогональное проецирование является отдельным случаем параллельного проецирования, в котором лучи перпендикулярны плоскости проекций (рис. 1.4).

 Ортогональное проецирование
Ортогональное проецирование
Метод ортогонального проецирования положенный в основу построения конструкторской документации, а именно сборочных и рабочих чертежей и эскизов в машиностроении.
Основные свойства ортогонального проецирования будут рассмотрены по мере преподавания материала.
Эпюр Монжа
Эпюр Монжа (от франц. epure – чертёж) – чертёж, в котором пространственная фигура изображена с использованием проецирования на систему двух или трёх взаимно перпендикулярных площадей П1, П2, П3 с дальнейшим условным совмещением последних в одну плоскость (рис. 1.5 а). П1, П2, П3 – горизонтальная, фронтальная и профильная плоскости проекций.
Чертёж, построенный методом проекций, называется проецирующим, или комплексным чертежом. На рис. 1.5 б построен комплексный чертёж точки А, который складывается из трёх проекций последней: А1 – горизонтальная проекция; А2 – фронтальная проекция; А3 – профильная проекция точки А.

 Построение комплексного чертежа точки
Построение комплексного чертежа точки
Линии, которые проходят через пары проекций А1А2, А1А3, А2А3, называются линиями проекционной связи. Они перпендикулярны или параллельны координатным осям х, y, z.
На комплексном чертеже ось у дублируется. Это приводит к тому, что одну из проекций точки можно обозначить по двум другим, как это показано стрелками на рис. 1.5 б.
Проецирование точки
Центральное проецирование заключается в проведении через каждую точку ( А, В, С ,…) изображаемого объекта и определённым образом выбранный центр проецирования ( S ) прямой линии ( SA , SB , >… — проецирующего луча ).
Принадлежность точек четвертям и октантам
Пространство условно можно разделить с помощью плоскостей проекций П1, П2 на четыре части – четверти (рис. 1.6 а), а с помощью плоскостей П1, П2, П3 (рис. 1.6 б) – на восемь частей – октантов (от греческого οκτώ – восемь).
Каждая из проекций точки А (рис. 1.5 б) определяется парой координат: А1(x,y), А2(x,z), А3(y,z). Знак «+» или «–» при числовом значении x, y, z позволяет сделать вывод про принадлежность точки А той или другой четверти, октанту (табл. 1.1 – 1.2). Примеры комплексных чертежей точек, которые принадлежат разным четвертям и октантам, приведены на рис. 1.7.

 Четверти (а) и октанты (б).
Четверти (а) и октанты (б).


 Принадлежность точек четвертям и октантам
Принадлежность точек четвертям и октантам
Принадлежность точек плоскостям проекций и осям координат
Координаты точки иногда называют так: х – ширина; у – глубина; z – высота. В случае, когда высота z точки равна нулю, точка принадлежит плоскости П1 (рис. 1.8, точка А). Если глубина у точки равна нулю, точка принадлежит плоскости П2 (рис. 1.8, точка В). В случае нулевой ширины х, точка принадлежит плоскости П3 (рис. 1.8, точка С).
Если две координаты точки равны нулю, точка принадлежит оси, которая отвечает за третью (не нулевую) координату. Например, точка, которая имеет координаты ( ), принадлежит оси у, поскольку у ≠ 0, х = z = 0.
), принадлежит оси у, поскольку у ≠ 0, х = z = 0.

 Принадлежность точек плоскостям проекций.
Принадлежность точек плоскостям проекций.
Проецирование прямой
Проецирующие прямые — прямые перпендикулярные одной из плоскостей проекций. Проекцией проецирующей прямой на плоскость проекций, к которой она перпендикулярна, является точка (след прямой).
Прямая общего положения
Прямую l в пространстве можно задать двумя точками А и В, которые ей принадлежат (рис. 1.9 а). Проекцией прямой на любую плоскость проекций является прямая (рис. 1.9) или точка (см. п. 1.4.2, рис. 1.11).

 Прямая общего положения
Прямая общего положения
Прямая, не параллельная и не перпендикулярная ни одной из плоскостей проекций, называется прямой общего положения.
Прямые особого (частного) положения
Прямые, параллельные или перпендикулярные к плоскостям проекций, называются прямыми особого(частного) положения. Их детальное рассмотрение обусловлено тем, что эти линии используются для решения большинства задач начертательной геометрии.
Прямые особого положения подразделяются на два вида:
а) прямая уровня – прямая, параллельная только одной из плоскостей проекций:
1) горизонталь h – прямая, параллельная П1 (рис. 1.10 а);
2) фронталь f – прямая, параллельная П2 (рис. 1.10 б);
3) профильная прямая уровня p – прямая, параллельная П3 (рис. 1.10 в);
б) проецирующая прямая – прямая, перпендикулярная плоскости проекций:
1) горизонтально- проецирующая прямая u – прямая, перпендикулярная П1 (рис. 1.11 а);
2) фронтально-проецирующая пряма v – прямая, перпендикулярная П2 (рис. 1.11 б);
3) профильно-проецирующая пряма w – прямая, перпендикулярная П3 (рис. 1.11 в)
Длина отрезка прямой уровня h, f, p, соответственно на плоскостях проекций П1, П2, П3 является действительной длиной размещённого в пространстве отрезка. Таким образом, прямая уровня проецируется на одну из плоскостей проекций в натуральную величину (аббревиатура НВ).
Углы наклона прямой уровня к плоскостям проекций можно определять как углы наклона его проекций к осям координат (рис. 1.10, табл. 1.3). Например, угол β наклона горизонтали h к П2 обозначается как угол между проекцией h1 и осью х.
Отрезки проецирующих прямых проецируются на одну из плоскостей проекций в точку, а на две другие – в натуральную величину (рис. 1.11).

 Прямые уровня
Прямые уровня


 Проецирующие прямые
Проецирующие прямые
Следы прямой
Точки пересечения прямой с плоскостями проекций называются следами. Прямая общего положения имеет три следа – горизонтальный Н, фронтальный F, профильный Р (рис. 1.12).

 Следы прямых общего положения
Следы прямых общего положения
Способы определения следов прямой общего положения:
а) для определения горизонтального следа Н прямой l необходимо продолжить фронтальную проекцию l2 до пересечения с осью х (эта точка является фронтальной проекцией Н2 горизонтального следа) и провести вертикальную линию проекционной связи до пересечения с продолжением горизонтальной проекции l1. Полученная точка является горизонтальным следом Н прямой l и совпадает с его горизонтальной проекцией Н1 (рис. 1.13 а – б);
б) для определения фронтального следа F прямой l необходимо продолжить горизонтальную проекцию l1 до пересечения с осью х (эта точка является горизонтальной проекцией F1 фронтального следа) и провести вертикальную линию проекционной связи до пересечения с продолжением фронтальной проекции l2. Полученная точка является фронтальным следом F прямой l и совпадает с его фронтальной проекцией F2 (рис. 1.13 а);
в) для определения профильного следа Р прямой l необходимо продолжить фронтальную проекцию l2 до пересечения с осью z (эта точка является фронтальной проекцией Р2 профильного следа) и провести горизонтальную линию проекционной связи до пересечения с продолжением профильной проекции l3. Полученная точка является профильным следом Р прямой l и совпадает с его профильной проекцией Р3 (рис. 1.13 б).
Прямая уровня имеет только два следа, которые не принадлежат той плоскости, которой прямая параллельна (рис. 1.14)
. Проецирующая прямая имеет только один след, который совпадает с той проекцией прямой, которая является точкой (рис. 1.15).

 Определение следов прямой
Определение следов прямой

 Следы прямых уровня
Следы прямых уровня

 Следы проецирующих прямых
Следы проецирующих прямых
Способ прямоугольного треугольника
Длины проекций А1В1, А2В2, А3В3 отрезка АВ прямой общего положения всегда меньше, чем натуральная величина этого отрезка. Поэтому возникает проблема определения натуральной величины отрезка по известным его проекциям. Эта задача решается с помощью способа прямоугольного треугольника (рис. 1.16), который позволяет определять. в том числе, углы α, β, γ наклона отрезка к плоскостям проекций П1, П2, П3 соответственно.

 Способ прямоугольного треугольника
Способ прямоугольного треугольника
Суть способа прямоугольного треугольника:
а) для определения на плоскости П1 натуральной величины отрезка АВ необходимо определить разность ∆z высот точек А, В и отложить отрезок  длиной ∆z перпендикулярно к горизонтальной проекции А1В1. Длина гипотенузы
длиной ∆z перпендикулярно к горизонтальной проекции А1В1. Длина гипотенузы  прямоугольного треугольника
прямоугольного треугольника  является натуральной величиной отрезка АВ. Угол между горизонтальной проекцией А1В1 отрезка и его натуральной величиной
является натуральной величиной отрезка АВ. Угол между горизонтальной проекцией А1В1 отрезка и его натуральной величиной  равен углу α наклона отрезка АВ к плоскости П1;
равен углу α наклона отрезка АВ к плоскости П1;
б) для определения на плоскости П2 натуральной величины отрезка АВ необходимо определить разность ∆у глубин точек А, В и отложить отрезок  длиной ∆у перпендикулярно фронтальной проекции А2В2. Длина гипотенузы
длиной ∆у перпендикулярно фронтальной проекции А2В2. Длина гипотенузы  прямоугольного треугольника
прямоугольного треугольника  является натуральной величиной отрезка АВ. Угол между фронтальной проекцией А2В2 отрезка и его натуральной величиной
является натуральной величиной отрезка АВ. Угол между фронтальной проекцией А2В2 отрезка и его натуральной величиной  равен углу β наклона отрезка АВ к плоскости П2;
равен углу β наклона отрезка АВ к плоскости П2;
в) для определения на плоскости П3 натуральной величины отрезка АВ необходимо определить разность ∆х ширины точек А, В и отложить отрезок  длиной ∆х перпендикулярно профильной проекции А3В3. Длина гипотенузы
длиной ∆х перпендикулярно профильной проекции А3В3. Длина гипотенузы  прямоугольного треугольника
прямоугольного треугольника  является натуральной величиной отрезка АВ. Угол между профильной проекцией А3В3 отрезка и его натуральной величиной
является натуральной величиной отрезка АВ. Угол между профильной проекцией А3В3 отрезка и его натуральной величиной  равен углу γ наклона отрезка АВ к плоскости П3.
равен углу γ наклона отрезка АВ к плоскости П3.
Принадлежность точки прямой
В начертательной геометрии принадлежность точки А прямой l определяется с помощью проекций этих объектов.
Условие принадлежности точки прямой Точка А принадлежит прямой l, если три её ортогональные проекции A1, A2, A3 принадлежат соответствующим проекциям l1, l2, l3 прямой (рис. 1.17 а).
На рис. 1.17 б показаны три проекции точки А, которая принадлежит прямой l. На рис. 1.18 а точка В не принадлежит прямой  , поскольку две её проекции В1, В3 не принадлежат соответствующим проекциям
, поскольку две её проекции В1, В3 не принадлежат соответствующим проекциям  прямой. На рис. 1.18 б точка С не принадлежит прямой р профильного уровня, поскольку одна из её проекций С3 не принадлежит проекции
прямой. На рис. 1.18 б точка С не принадлежит прямой р профильного уровня, поскольку одна из её проекций С3 не принадлежит проекции  прямой.
прямой.

 Принадлежность точки прямой
Принадлежность точки прямой

 Непринадлежность точки прямой
Непринадлежность точки прямой
Взаимное расположение двух прямых
Две прямые в пространстве могут пересекаться (рис. 1.19 а), быть параллельными (рис. 1.19 б) или скрещивающимися .
Условие пересечения двух прямых
Две прямые l, m пересекаются в точке А, если три ортогональные проекции А1, А2, А3 являются точками пересечения соответствующих проекций прямых (рис. 1.20 а).
Условие параллельности двух прямых
Две прямые l, m параллельны, если три их ортогональные проекции попарно параллельны (рис. 1.20 б).

 Пересекающиеся и параллельные прямые
Пересекающиеся и параллельные прямые

 Условия пересечения и параллельности двух прямых
Условия пересечения и параллельности двух прямых
В случае, когда прямые не параллельны и не пересекаются, они являются скрещивающимися. их взаимное размещение рассмотрено в п. 1.4.7.3.
Особый случай прямых, которые пересекаются под прямым углом, рассмотрен в п. 1.4.8.
Определение видимости точек и линий
Определение видимости — это определение точек предмета, лежащих на одном луче проецирования (называемых конкурирующими), и обозначение на чертеже только тех из них, которые расположены по этому лучу ближе к наблюдателю.
Видимость внешнего контура
При решении задач начертательной геометрии необходимо учитывать видимость геометрических объектов (точек и линий). Среди совокупности всех объектов необходимо выделять такие два вида (рис. 1.21):
а)внешний контур – совокупность линий, которые находятся за границами всех других объектов на данной плоскости проекций;
б) сходящиеся линии– совокупность линий, пересекающихся в одной точке(.рёбра многогранника)
Правило определения видимости внешнего контура
Внешний контур на данной плоскости проекций всегда является видимым (рис. 1.21).

 Видимость точек и линий
Видимость точек и линий
Видимость сходящихся линий
Сходящиеся линии на разных плоскостях проекций могут иметь разную видимость.
Правило определения видимости сходящихся линий
Видимость сходящихся линий совпадает с видимостью точки их пересечения (рис. 1.22):
а) видимы на П1,если точка пересечения имеет наибольшую высоту;
б) видимы на П2, если точка пересечения имеет наибольшую глубину;
в) видимы на П3, если точка пересечения имеет наибольшую ширину.

 Видимость сходящихся линий (рёбер многогранника)
Видимость сходящихся линий (рёбер многогранника)
На рис. 1.22 четыре сходящиеся линии на горизонтальной проекции являются видимыми, поскольку высота z точки K их пересечения наибольшая. Три сходящиеся линии на фронтальной и профильной проекциях невидимы, поскольку точки М, N их пересечения являются невидимыми.
Метод конкурирующих точек
Метод конкурирующих точек позволяет определить взаимное расположение точек двух скрещивающихся прямых (рис. 1.23).
Суть метода конкурирующих точек
а) для определения того, какая из двух скрещивающихся прямых l, m глубже, на них выбираются точки 1, 2, размещённые на общей фронтально-проецирующей прямой v. На горизонтальной плоскости проекций находятся глубины у выбранных точек и делается вывод о том, какая линия впереди, какая сзади;
б) для определения того, какая из двух скрещивающихся прямых l, m выше, на них выбираются точки 3, 4, размещённые на общей горизонтально-проецирующей прямой  . На фронтальной плоскости проекций находятся высоты z выбранных точек и делается вывод о том, какая линия выше, какая ниже;
. На фронтальной плоскости проекций находятся высоты z выбранных точек и делается вывод о том, какая линия выше, какая ниже;
в) для определения того ,какая из двух скрещивающихся прямых l, m размещена слева, а какая справа, на них выбираются точки 5, 6 на общей профильно-проецирующей прямой w. На фронтальной плоскости проекций находятся широты х выбранных точек и делается вывод о том, какая линия слева, какая справа.

 Метод конкурирующих точек
Метод конкурирующих точек
На рис. 1.23 точка 2 находится глубже, поэтому её фронтальная проекция  является невидимой. В дальнейшем невидимые точки будут обозначаться в круглых скобках, например,
является невидимой. В дальнейшем невидимые точки будут обозначаться в круглых скобках, например,  . Проекция
. Проекция  также является невидимой, поскольку точка 4 размещена ниже точки 3. Точка 6 находится слева от точки 5, поэтому проекция
также является невидимой, поскольку точка 4 размещена ниже точки 3. Точка 6 находится слева от точки 5, поэтому проекция  является невидимой.
является невидимой.
Метод конкурирующих точек применяется, например, для определения видимости рёбер многогранников (рис. 1.24):
а) на горизонтальной проекции из пары скрещивающихся прямых АВ, СD первая является невидимой, поскольку из фронтальной проекции видно, что А2В2 находится ниже, чем C2D2;
б) на фронтальной проекции из пары скрещивающихся прямых АС, BD первая является невидимой, поскольку из горизонтальной проекции видно, что А1С1 находится сзади от В1D1;
в) на профильной проекции из пары скрещивающихся прямых АD, ВС вторая является невидимой, поскольку из фронтальной проекции видно, что В2С2 находится справа от А2D2.

 Видимость скрещивающихся прямых
Видимость скрещивающихся прямых
Перпендикулярность прямых
Ортогональные проекции двух прямых общего положения, которые пересекаются под прямым углом, в общем случае не являются перпендикулярными. Другими словами, прямой угол при его проецировании на плоскости проекций П1, П2, П3 искажается (рис. 1.25).

 Проецирование прямого угла
Проецирование прямого угла
Существуют отдельные случаи, когда прямой угол проецируется в натуральную величину. Эти случаи описываются теоремой о проецировании прямого угла.
Теорема о проецировании прямого угла
Прямой угол проецируется в натуральную величину на ту плоскость проекций, которой параллельна одна из его сторон (рис. 1.26 а).
Как следствие теоремы, прямой угол между прямой общего положения l и горизонталью h проецируется в натуральную величину на плоскость проекций П1; между l и фронталью f – на плоскость П2 (рис. 1.26 б).

 Теорема проецирования прямого угла
Теорема проецирования прямого угла
Способ построения прямой общего положения, перпендикулярной заданной, описан в пп. 1.6.1.1 – 1.6.1.2.
Проецирование плоскости
Проецирование — это построение изображения геометрического объекта на плоскости путем проведения через все его точки воображаемых проецирующих лучей до пересечения их с плос—костью, называемой плоскостью проекций.
Способы задания плоскостей
Плоскость Σ в пространстве можно задать шестью способами (рис. 1.27):
а) тремя точками А, В, С, которые не принадлежат одной прямой;
б) прямой l и точкой D, которая её не принадлежит;
в) двумя параллельными прямыми а и b;
г) двумя пересекающимися прямыми c, d;
д) плоской фигурой Ф (треугольник, окружность и т.д.);
е) следами  – линиями пересечения плоскости с плоскостями проекций (см. п. 1.5.2).
– линиями пересечения плоскости с плоскостями проекций (см. п. 1.5.2).

 Способы задания плоскостей
Способы задания плоскостей
Разнообразие способов задания плоскостей обусловливает существование в начертательной геометрии большого количества способов решения задач.
Следы плоскости
Следами  плоскости называются линии её пересечения с плоскостями проекций П1, П2, П3. Каждый след может быть построен по двум точкам – соответствующим следам двух прямых этой плоскости (рис. 1.28).
плоскости называются линии её пересечения с плоскостями проекций П1, П2, П3. Каждый след может быть построен по двум точкам – соответствующим следам двух прямых этой плоскости (рис. 1.28).

 Следы плоскости общего положения
Следы плоскости общего положения
Правило определения следов плоскости:
а) для определения горизонтального следа  плоскости Σ необходимо выбрать на ней две прямые l, m и определить горизонтальные следы
плоскости Σ необходимо выбрать на ней две прямые l, m и определить горизонтальные следы  этих прямых (см. п. 1.4.3). Горизонтальный след
этих прямых (см. п. 1.4.3). Горизонтальный след  плоскости Σ проводится через точки
плоскости Σ проводится через точки  до пересечения с осями х, у. Полученные точки
до пересечения с осями х, у. Полученные точки  являются точками пересечения плоскости Σ с осями координат х, у;
являются точками пересечения плоскости Σ с осями координат х, у;
б) для определения фронтального следа  плоскости Σ достаточно определить фронтальный след F одной из прямых (например, l). Фронтальный след
плоскости Σ достаточно определить фронтальный след F одной из прямых (например, l). Фронтальный след  плоскости Σ проводится через точки
плоскости Σ проводится через точки  F до пересечения осью z. Полученная точка
F до пересечения осью z. Полученная точка  является точкой пересечения плоскости Σ с осью z;
является точкой пересечения плоскости Σ с осью z;
в) профильный след  плоскости Σ проходит через точки
плоскости Σ проходит через точки  Совокупность параметров
Совокупность параметров  называется определителем плоскости.
называется определителем плоскости.
Свойства следов плоскости:
а) каждая пара следов плоскости общего положения пересекается на оси координат:  – на оси х;
– на оси х;  – на оси z;
– на оси z;  – на оси у. Это свойство даёт возможность определять один из следов плоскости по двум другим;
– на оси у. Это свойство даёт возможность определять один из следов плоскости по двум другим;
б) следы плоскости являются отдельным случаем линий уровня, которые принадлежат плоскостям проекций: горизонтальный след является горизонталью с нулевой высотой; фронтальный след является фронталью с нулевой глубиной; профильный след является прямой профильного уровня с нулевой шириной;
в) проекция следа плоскости на одну из плоскостей проекций является натуральной величиной (НВ), а на две другие – совпадает с осями координат (табл. 1.4); Обозначенные свойства позволяют использовать следы плоскости для быстрого решения задач начертательной геометрии.

Главные линии плоскости
Главными линиями плоскости (рис. 1.29) являются:
а) прямые уровня: горизонталь h, фронталь f , профильная прямая уровня p. Линиями уровня плоскости можно выбирать её следы 
б) линии наибольшего наклона – прямые линии, которые образуют наибольший угол с плоскостями проекций.
Свойства линий наибольшего наклона:
а) линия  наибольшего наклона к П1 перпендикулярна любой горизонтали h плоскости; б) линия
наибольшего наклона к П1 перпендикулярна любой горизонтали h плоскости; б) линия  наибольшего наклона к П2 перпендикулярна любой фронтали f плоскости;
наибольшего наклона к П2 перпендикулярна любой фронтали f плоскости;
в) линия  наибольшего наклона к П3 перпендикулярна любой прямой профильного уровня р плоскости.
наибольшего наклона к П3 перпендикулярна любой прямой профильного уровня р плоскости.

 Главные линии плоскости
Главные линии плоскости
Углы наклона плоскости к плоскостям проекции
Углы α, β, γ наклона плоскости Σ к плоскостям проекций П1, П2, П3 определяются как углы наклона линий наибольшего наклона  к соответствующим плоскостям проекций (рис. 1.29). Например, угол β между
к соответствующим плоскостям проекций (рис. 1.29). Например, угол β между  и П2 является углом наклона плоскости Σ к П2.
и П2 является углом наклона плоскости Σ к П2.
Натуральная величина углов наклона плоскости Σ к плоскостям проекций П1, П2, П3 определяется способами преобразования комплексного чертежа (см. раздел 2), кроме случаев, обозначенных в п. 1.5.5.
Плоскости особого(частного) положения
В начертательной геометрии различают такие виды плоскостей:
а) плоскость общего положения – плоскость, не параллельная и не перпендикулярная ни одной из плоскостей проекций (рис. 1.27 – 1.29);
б) плоскость уровня – плоскость, параллельная плоскости проекций:
1) горизонтальная плоскость уровня – плоскость, параллельная П1 (рис. 1.30 а);
2) фронтальная плоскость уровня –плоскость, параллельная П2 (рис. 1.30 б);
3) профильная плоскость уровня–плоскость, параллельная П3 (рис. 1.30 в);
в) проецирующая плоскость – плоскость, перпендикулярная только одной плоскости проекций:
1) горизонтально—проецирующая плоскость – плоскость, перпендикулярная П1 (рис. 1.31 а);
2) фронтально—проецирующая плоскость – плоскость, перпендикулярная П2 (рис. 1.31 б);
3) профильно-проецирующая плоскость – плоскость, перпендикулярная П3 (рис. 1.31 в).

 Плоскости уровня
Плоскости уровня
Свойства плоскостей особого(частного) положения:
а) горизонтальная плоскость уровня не имеет горизонтального следа, а её фронтальный и профильный следы перпендикулярны оси z;
б) фронтальная плоскость уровня не имеет фронтального следа, а её горизонтальный и профильный следы перпендикулярны оси y;
в) профильная плоскость уровня не имеет профильного следа, а её горизонтальный и фронтальный следы перпендикулярны оси х;
г) фронтальный и профильный следы горизонтально-проецирующей плоскости параллельны оси z;
д) горизонтальный и профильный следы фронтально-проецирующей плоскости параллельны оси у;
е) горизонтальный и фронтальный следи профильно-проецирующей плоскости параллельны оси х;
ж) углы α, β, γ наклона проецирующих плоскостей к плоскостям проекций П1, П2, П3 являются углами наклона следов к осям координат (рис. 1.31).


 Проецирующие плоскости
Проецирующие плоскости
Плоскости особого положения широко используются при решении задач на пересечение геометрических объектов (см. п. 1.5.8, рис. 1.42 – 1.44; раздел 4; п. 6.4, рис. 6.18, 6.21 – 6.23).
Принадлежность точки плоскости
Точка А принадлежит плоскости Σ, если она принадлежит любой линии l (например, прямой) этой плоскости (рис. 1.32).

 Принадлежность точки плоскости
Принадлежность точки плоскости
Для определения неизвестных проекций точки А, принадлежащей плоскости Σ, по одной известной проекции (например, А2) применяются такие способы:
а) способ прямой общего положения: через известную проекцию А2 точки проводится фронтальная проекция l2 прямой общего положения; вводятся вспомогательные точки  прямой и определяются их горизонтальные и профильные проекции, с помощью которых строятся проекции l1, l3 прямой l. По условию принадлежности точки А прямой l (см. п. 1.4.5, рис. 1.17) определяются проекции А1, А3 (рис. 1.33);
прямой и определяются их горизонтальные и профильные проекции, с помощью которых строятся проекции l1, l3 прямой l. По условию принадлежности точки А прямой l (см. п. 1.4.5, рис. 1.17) определяются проекции А1, А3 (рис. 1.33);
б) способ прямой особого(частного) положения:
1) способ горизонтали: через известную проекцию А2 точки проводится фронтальная проекция h2 горизонтали (параллельно оси х); вводится вспомогательная точка 1 и определяется её горизонтальная проекция, через которую проводится h1 (параллельно горизонтальному следу  плоскости). С помощью вертикальной линии проекционной связи определяется проекция А1. Проекция А3 является точкой пересечения линий проекционной связи, проведенных с А1, А2 (рис. 1.34 а);
плоскости). С помощью вертикальной линии проекционной связи определяется проекция А1. Проекция А3 является точкой пересечения линий проекционной связи, проведенных с А1, А2 (рис. 1.34 а);
2) способ фронтали: через известную проекцию А2 точки проводится фронтальная проекция f2 фронтали (параллельно  ). Вводиться вспомогательная точка 2 и определяется её горизонтальная проекция, через которую проводится f1 (параллельно оси х). С помощью вертикальной линии проекционной связи определяется проекция А1; Проекция А3 является точкой пересечения линий проекционной связи, проведенных с А1, А2 (рис. 1.34 б);
). Вводиться вспомогательная точка 2 и определяется её горизонтальная проекция, через которую проводится f1 (параллельно оси х). С помощью вертикальной линии проекционной связи определяется проекция А1; Проекция А3 является точкой пересечения линий проекционной связи, проведенных с А1, А2 (рис. 1.34 б);
3) способ профильной прямой уровня: через известную проекцию А2 точки проводится фронтальная проекция р2 профильной прямой уровня (параллельно оси z). Вводится вспомогательная точка 3 и определяется её профильная проекция, через которую проводится р3 (параллельно  ). С помощью горизонтальной линии проекционной связи определяется проекция А3. Проекция А1 является точкой пересечения линий проекционной связи, проведенных из проекций А2, А3 (рис. 1.34 в).
). С помощью горизонтальной линии проекционной связи определяется проекция А3. Проекция А1 является точкой пересечения линий проекционной связи, проведенных из проекций А2, А3 (рис. 1.34 в).

 Способ прямой общего положения
Способ прямой общего положения

 Способ прямых особого положения
Способ прямых особого положения
Взаимное расположение прямой и плоскости
Прямая l в пространстве может принадлежать плоскости Σ, быть параллельною ей или пересекать её (рис. 1.35 а – в).

 Взаимное расположение прямой и плоскости
Взаимное расположение прямой и плоскости

 Принадлежность прямой плоскости
Принадлежность прямой плоскости
Условие принадлежности прямой плоскости
Прямая l принадлежит плоскости Σ, если две ей точки А, В принадлежат этой плоскости (рис. 1.35 а).
Определение неизвестных проекций прямой l, которая принадлежит плоскости Σ, состоит в определении неизвестных проекций двух точек А, В этой прямой способами, описанными в п. 1.5.6. Например (рис. 1.36), если известна фронтальная проекция отрезка АВ, который принадлежит плоскости Σ, заданной параллельными прямыми а, b, проводится фронтальная проекция прямой l общего положения через А2, В2. С помощью двух вспомогательных точек 1, 2, принадлежащих прямым а, b плоскости, и вертикальных линий проекционной связи определяются горизонтальные проекции А1В1 точек прямой l.
На рис. 1.36 оси координат не обозначены, поскольку для решения многих позиционных задач начертательной геометрии необходимости в их построении нет.
Условие параллельности прямой и плоскости
Прямая l параллельна плоскости Σ, если она параллельна любой прямой m этой плоскости (рис. 1.35 б).
Способ построения прямой, параллельной плоскости
Для построения проекций прямой l, проходящей через точку D параллельно плоскости Σ, необходимо построить проекции любой прямой m, принадлежащей плоскости. Проекции прямой l будут проходить через проекции точки D параллельно соответствующим проекциям прямой m, (рис. 1.37). Поскольку существует бесконечное число способов проведения прямой m в плоскости Σ, задача о параллельности прямой и плоскости имеет бесконечное множество решений.

 Параллельность прямой и плоскости
Параллельность прямой и плоскости
Если прямая l не принадлежит и не параллельна плоскости Σ, они пересекаются в точке K (рис. 1.35 в), которая определяется способами вспомогательной секущей плоскости , замены плоскостей проекций (см. п. 2.1.8, 2.2.6), косоугольного проецирования (см. п. 2.5).
Суть способа вспомогательной секущей плоскости при определении точки пересечения прямой и плоскости
Для определения точки K пересечения прямой l и плоскости Σ (заданной, например, треугольником АВС) необходимо провести через прямую l вспомогательную плоскость Ω особого положения (например, горизонтально-проецирующую) и определить линию m пересечения этой плоскости с заданной плоскостью . Искомая точка K является точкой пересечения прямых l, m (рис. 1.38). Задача о нахождении точки пересечения прямой и плоскости дополняется определением видимости частей прямой l методом конкурирующих точек (см. п. 1.4.7.3).

 Способ вспомогательной секущей плоскости
Способ вспомогательной секущей плоскости
В начертательной геометрии вспомогательные секущие плоскости особого положения обозначаются одним из следов (например, плоскость Ω на рис. 1.38 показана горизонтальным следом Ω1).
Взаимное расположение двух плоскостей
Две плоскости в пространстве могут совпадать, быть параллельными или пересекаться по линии (рис. 1.39).

 Взаимное расположение двух плоскостей
Взаимное расположение двух плоскостей
Условие совпадения двух плоскостей
Плоскость Ω принадлежит плоскости Σ, если они имеют три общие точки А, В, С (рис. 1.39 а). Определение неизвестных проекций плоскости Ω, ,которая принадлежит плоскости Σ, состоит в определении неизвестных проекций трёх точек А, В, С плоскости Ω способами, описанными в п. 1.5.6 – 1.5.7. Например (рис. 1.40), для нахождения неизвестной горизонтальной проекции треугольника АВС, принадлежащего плоскости Σ, применены методы прямой l общего положения и горизонтали h.
Условие параллельности двух плоскостей
Плоскость Ω параллельна плоскости Σ, если пара непараллельных прямых плоскости Ω параллельна паре непараллельных прямых плоскости Σ (рис. 1.39 б).
Способ построения параллельных плоскостей
Для построения проекций плоскости Ω, проходящей через точку D параллельно плоскости Σ (заданной, например, параллельными прямыми a, b), необходимо построить проекции двух непараллельных прямых с, d, принадлежащих плоскости Σ. Искомая плоскость Ω буде задана двумя прямыми l, m, проекции которых проходят через соответствующие проекции точки D параллельно проекциям вспомогательных прямых с, d (рис. 1.41).
Если плоскости Ω, Σ не совпадают и не параллельны, то они пересекаются по прямой линии (рис. 1.39 в).

 Совпадение плоскостей
Совпадение плоскостей

 Параллельность плоскостей
Параллельность плоскостей
Линия пересечения двух плоскостей определяется такими способами:
а) способ вспомогательных секущих плоскостей (рис. 1.42);
б) способ плоскостей-посредников особого(частного) положения (рис. 1.43 – 1.44);
в) способ следов (рис. 1.45);
г) способы преобразования комплексного чертежа (см. п. 2.1.8, 2.3.5);
д) способ косоугольного проецирования (см. п. 2.5).
Суть способа вспомогательных секущих плоскостей при определении линии пересечения двух плоскостей
Линия k пересечения плоскостей Ω, Σ определяется по двум её точкам M, N. Каждая из этих точек является точкой пересечения плоскости Σ с любыми двумя линиями а, b плоскости Ω. Каждая из точек M, N определяется методом вспомогательной секущей плоскости (см. п. 1.5.7, рис. 1.38).
Например, на рис. 1.42 одна из плоскостей задана треугольником АВС, другая – параллельными прямыми a, b. Для определения точки М пересечения плоскостей по прямой а проводится фронтально-проецирующая плоскость Ψ, заданная фронтальным следом Ψ2, м находится линия l пересечения вспомогательной плоскости Ψ с треугольником АВС. Точка М является точкой пересечения прямой l с прямой а. Для определения точки N пересечения плоскостей по прямой b проводится фронтально-проецирующая плоскость Θ, заданная фронтальным следом Θ2, и находится линия m пересечения вспомогательной плоскости Θ с треугольником АВС. Точка N — точка пересечения прямой m с прямой b. Линия k пересечения двух заданных плоскостей проходит через точки M, N. Задача о нахождении линии пересечения двух плоскостей дополняется определением видимости частей прямых a, b и отрезков АВ, ВС, АС. Проекции k1, k2 линии пересечения двух плоскостей всегда видимы.

 Способ вспомогательных секущих плоскостей
Способ вспомогательных секущих плоскостей
Суть способа плоскостей-посредников при определении линии пересечения двух плоскостей
Линия k пересечения плоскостей Ω, Σ определяется по двум её точкам M, N. Для определения точки М вводится плоскость Ψ особого положения, которая пересекает заданные плоскости по прямым линиям a, b. Точкой пересечения этих прямых является точка М. Для определения точки N вводится плоскость Θ особого положения, пересекающая заданные плоскости по прямым линиям с, d. Точкой пересечения этих прямых является точка N. Искомая линия k пересечения плоскостей Ω, Σ проходит через найденные точки М, N (рис. 1.43).
Например, на рис. 1.44 две плоскости заданы треугольниками АВС, DEF. Для определения точки М пересечения плоскостей вводится фронтально-проецирующая плоскость Ψ, заданная фронтальным следом Ψ2, и находятся линии a, b её пересечения с треугольниками АВС, DEF. Точка М является точкой пересечения прямых a, b. Для определения точки N пересечения плоскостей вводится горизонтальная плоскость уровня Θ, заданная фронтальным следом Θ2, и находятся линии с, d её пересечения с треугольниками АВС, DEF. Точка N является точкой пересечения прямых c, d.

 Способ плоскостей — посредников
Способ плоскостей — посредников

 Способ плоскостей — посредников особого положения
Способ плоскостей — посредников особого положения
Суть способа следов при определении линии пересечения двух площадей
Линия k пересечения плоскостей Σ, Ω строится по двум точкам M, N. Строятся следы плоскостей. Точки M, N являются точками пересечения двух пар одноимённых следов плоскостей (рис. 1.45).
Например, на рис. 1.46 плоскость Σ задана параллельными прямыми a, b, плоскость Ω – треугольником АВС. Горизонтальный след  плоскости Σ строится по двум следам
плоскости Σ строится по двум следам  прямых a, b. Фронтальный след
прямых a, b. Фронтальный след  проходит через точку
проходит через точку  и фронтальный след F прямой а. Горизонтальный след
и фронтальный след F прямой а. Горизонтальный след  плоскости Ω строится по двум следам
плоскости Ω строится по двум следам  прямых АВ, ВС. Фронтальный след
прямых АВ, ВС. Фронтальный след  проходит через точку
проходит через точку  и фронтальный след
и фронтальный след  прямой АВ. Точка М, которая совпадает со своей горизонтальной проекцией М1, является точкой пересечения горизонтальных следов
прямой АВ. Точка М, которая совпадает со своей горизонтальной проекцией М1, является точкой пересечения горизонтальных следов  Точка N, которая совпадает со своей фронтальной проекцией N2, является точкой пересечения фронтальных следов
Точка N, которая совпадает со своей фронтальной проекцией N2, является точкой пересечения фронтальных следов  . Проекции М2, N1 находятся на оси х. Горизонтальная проекция k1 искомой линии k пересечения двух площадей проходит через точки М1, N1, фронтальная k2 – через точки М2, N2.
. Проекции М2, N1 находятся на оси х. Горизонтальная проекция k1 искомой линии k пересечения двух площадей проходит через точки М1, N1, фронтальная k2 – через точки М2, N2.

 Способ следов
Способ следов

 Определение линии пересечения плоскостей способом следов
Определение линии пересечения плоскостей способом следов
Способ следов можно рассматривать как частный случай способа плоскостей-посредников, в котором плоскости-посредники являются двумя плоскостями проекций (на рис. 1.46 – П1, П2).
Перпендикулярность прямой и плоскости и двух плоскостей
Условие перпендикулярности прямой и плоскости
Прямая п перпендикулярна плоскости Σ, если она перпендикулярна двум не параллельным прямым этой плоскости (рис. 1.47).
Как эти прямые удобно выбирать линии уровня плоскости, например, горизонталь h и фронталь f. Только в этом случае прямые углы между п, h и f проецируются в натуральную величину на П1, П2 (см. п. 1.4.8, рис. 1.26).

 Перпендикулярность прямой и плоскости
Перпендикулярность прямой и плоскости

 Построение прямой, перпендикулярной плоскости
Построение прямой, перпендикулярной плоскости
На рис. 1.48 построены проекции прямой п, которая проходит через точку D перпендикулярно плоскости Σ, заданной параллельными прямыми a, b. В плоскости Σ через произвольно выбранную её точку А проведены горизонталь h и фронталь f. из горизонтальной проекции D1 точки D проведена горизонтальная проекция  перпендикулярная проекции h1. из фронтальной проекции D2 проведена фронтальная проекция
перпендикулярная проекции h1. из фронтальной проекции D2 проведена фронтальная проекция  , перпендикулярная проекции f2.
, перпендикулярная проекции f2.
Условие перпендикулярности двух плоскостей
Две плоскости Ω, Σ перпендикулярны, если любая прямая  , которая принадлежит первой плоскости, перпендикулярна второй плоскости (рис. 1.49).
, которая принадлежит первой плоскости, перпендикулярна второй плоскости (рис. 1.49).

 Перпендикулярность плоскостей
Перпендикулярность плоскостей

 Построение взаимно перпендикулярных плоскостей
Построение взаимно перпендикулярных плоскостей
На рис. 1.50 построены проекции плоскости Ω, которая проходит через точку D перпендикулярно плоскости Σ, заданной параллельными прямыми a, b. Плоскость Ω задана двумя прямыми  пересекающимися в точке D. При этом прямая
пересекающимися в точке D. При этом прямая  перпендикулярна плоскости Σ (рис. 1.48). Прямая
перпендикулярна плоскости Σ (рис. 1.48). Прямая  имеет произвольную ориентацию в пространстве, поэтому задача построения двух взаимно перпендикулярных плоскостей имеет бесконечное число решений.
имеет произвольную ориентацию в пространстве, поэтому задача построения двух взаимно перпендикулярных плоскостей имеет бесконечное число решений.
Линия пересечения взаимно перпендикулярных плоскостей по необходимости определяется одним из способов, описанных в п. 1.5.8.
Примеры и образцы решения задач:
Услуги по выполнению чертежей:
Присылайте задания в любое время дня и ночи в ➔ 

Официальный сайт Брильёновой Натальи Валерьевны преподавателя кафедры информатики и электроники Екатеринбургского государственного института.
Все авторские права на размещённые материалы сохранены за правообладателями этих материалов. Любое коммерческое и/или иное использование кроме предварительного ознакомления материалов сайта natalibrilenova.ru запрещено. Публикация и распространение размещённых материалов не преследует за собой коммерческой и/или любой другой выгоды.
Сайт предназначен для облегчения образовательного путешествия студентам очникам и заочникам по вопросам обучения . Наталья Брильёнова не предлагает и не оказывает товары и услуги.
http://zaochnik.com/spravochnik/matematika/prjamaja-ploskost/proektsija-tochki-na-prjamuju-koordinaty-proektsii/
http://natalibrilenova.ru/sposobyi-proetsirovaniya/