Поверхности и линии в пространстве и их уравнения


Поверхности и линии в пространстве и их уравнения
- ПОВЕРХНОСТИ И ЛИНИИ В ПРОСТРАНСТВЕ И ИХ УРАВНЕНИЯ 1. Поверхность и ее уравнение. Поверхность в пространстве можно рассматривать как геометрическое место точек, удовлетворяющих какому-либо условию. Например, сфера радиуса R с центром в точке 0 \ есть геометрическое место всех точек пространства, находящихся от точки 0 \ на расстоянии R. Прямоугольная система координат Oxyz в пространстве позволяет установить взаимно однозначное соответствие между точками пространства и тройками чисел х, у и г -. Их координаты Свойства, общая все точки поверхности, можно записать в виде уравнения, связывающая координата всех точек поверхности.
которому удовлетворяют координаты каждой точки, лежащей на поверхности, и не удовлетворяют координаты точек, не лежащих на этой Поверхностные координаты, точки и z в уравнении Уравнение поверхности позволяет изучение геометрических свойств поверхности заменить исследованием его уравнения.
Уравнением данной поверхности в прямоугольной системе координат Oxyz называется такое уравнение Р (х, у, г) = 0 с тремя переменными х, у и г, Людмила Фирмаль
И не удовлетворяю Если центр сферы 0 \ соответствует точке начала координат, то уравнение сферы принимает вид х2 -4у2 4-2 -4у Если такое же дано уравнение вида F (x; у; z) = 0, то оно, вообще говоря, определяется в пространскопне Выражение «вообще говоря» означает, что в отдельных случаях уравнение F (х \ у \ г) = 0 может определять не поверхность, а точку, линию или вовсе не определять никакой геометрический образ.
Примеры решения и задачи с методическими указаниями
| Решение задач | Лекции |
| Сборник и задачник | Учебник |
- Говорят, «поверхность вырождается». . Так, уравнению 2х2 + у1 4- z2 4-1 = 0 не удовлетворяют никакие действительные значения гг, у, г Уравнению 0 • х2 4- у2 + z2 = 0 удовлетворяют лишь координаты точек, лежащих на оси Ох (из уравнения следует: 2 / = 0, z = 0, а ж-любое число). Итак, поверхность в пространстве может быть геометрической и аналитической. 1. Уравнение этой поверхности. 2. Дано уравнение F (x \ y \ z) = 0. Исследовать форму поверхности, определяемой этим уравнением.
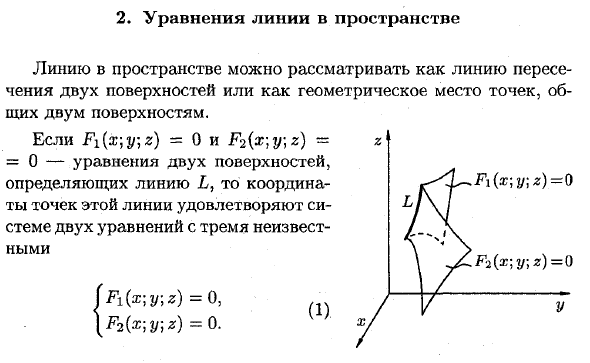
Уравнения линии в пространстве Fx (x-y \ z) = b F2 (x; y> z) = 0 Геометрия и геометрия Fx (x \ y \ z) = 0, F3 (®; y; *) = 0.Уравнение системы (1) 1-2 = 0
= О — уравнения двух поверхностей, определяющих линию L, то координаты точек этой линии удовлетворяют системе двух уравнений с тремя неизвестными Людмила Фирмаль
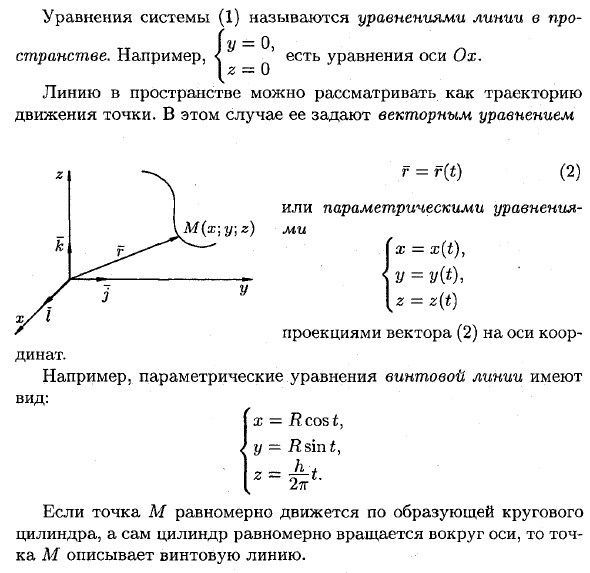
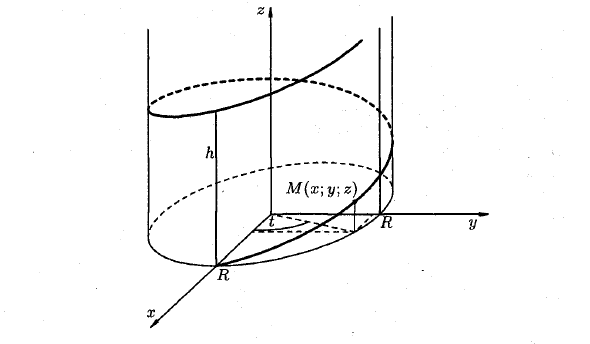
Траектории движения точки. (2) M (x \ y \ z) f = r (t) или параметрическими уравнениями х = х (т), У = 2 / (*), г = z (т) проекциями (2) на оси координат. Например, параметрические уравнения х = Я стоимость, у-R sin t, * = Если точка М равномерно двигается по образующей круговой цилиндру, а сам цилиндр равномерно вращается вокруг оси, то точка М описывает винтовая линия.



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Уравнения поверхности и линии в пространстве с примерами решения
Содержание:
Уравнения поверхности и линии в пространстве
Определение: Уравнение м поверхности в пространстве Oxyz называется такое уравнение между переменными х, у у z, которому удовлетворяют координаты всех точек данной поверхности и не удовлетворяют координаты точек, не лежащих на этой поверхности. То есть если

— уравнение поверхности Р (рис. 189), то при М(х, у, z) 
Таким образом, уравнение (1) выполнено тогда и только тогда, когда точка М(х, у, z) принадлежит данной поверхности. Координаты произвольной точки поверхности называются текущими координатами точки. Поэтому составить уравнение поверхности — это значит найти связь между текущими координатами ее точек.
Пример (уравнения координатных плоскостей):
Каждая точка М(х, у, z), лежащая на координатной плоскости Oyz, имеет абсциссу х = 0; обратно, если для какой-нибудь точки М(х, у, z) абсцисса ее х = 0, то эта точка расположена на плоскости Oyz. Следовательно,
— уравнение координатной плоскости Oyz. Аналогично,

— соответственно уравнения координатных плоскостей Oxz и Оху.
Формула  обозначает, что точка М принадлежит Р. Формула
обозначает, что точка М принадлежит Р. Формула  обозначает, что точка N не принадлежит Р.
обозначает, что точка N не принадлежит Р.
В более общем случае

— уравнения трех плоскостей, перпендикулярных соответствующим координатным осям Ох, Оу, Ог и отсекающих на них отрезки, численно равные 
Теорема: Уравнение цилиндрической поверхности, образующие которой параллельны координатной оси, не содержит текущей координаты, одноименной с этой координатной осью, и обратно.
Доказательство: Пусть, например, цилиндрическая поверхность Р образована перемещением прямой  (образующая) вдоль заданной линии L, лежащей в плоскости Оху (направляющая) (рис. 190).
(образующая) вдоль заданной линии L, лежащей в плоскости Оху (направляющая) (рис. 190).
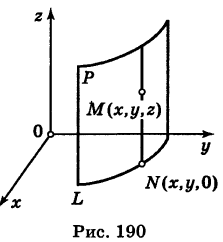
Обозначим через М(х, у, z) точку поверхности Р с текущими координатами х, у и z. Образующая MN, проходящая через точку М, пересекает направляющую, очевидно, в точке N(x, у, 0).

— уравнение направляющей L в координатной плоскости Оху. Этому уравнению удовлетворяют координаты точки N. Так как точка М поверхности Р имеет ту же самую абсциссу хиту же самую ординату у, что и точка N, а переменная г в уравнение (3) не входит, то координаты точки М также удовлетворяют уравнению (3). Таким образом, координаты любой точки М(х, у, z) поверхности Р удовлетворяют уравнению (3). Обратно, если координаты какой-нибудь точки М(х, у, z) удовлетворяют уравнению (3), то эта точка расположена на прямой MN || Оz такой, что ее след на плоскости Оху, точка N(x, у, 0), лежит на линии L, а значит, точка М принадлежит цилиндрической поверхности Р. Следовательно,

является уравнением цилиндрической поверхности в пространстве Oxyz, причем в этом уравнении отсутствует координата z.
Пример (уравнение эллиптического цилиндра):
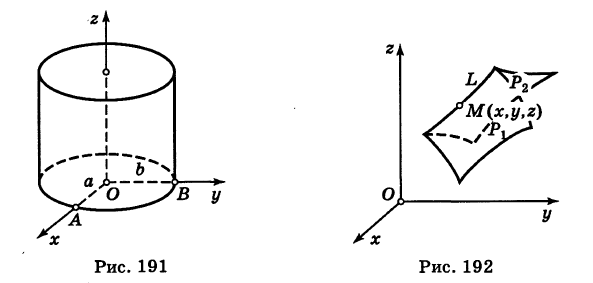
Эллиптический цилиндр, в основании которого лежит эллипс с полуосями а и b, а осью служит ось Оz (рис. 191), на основании предыдущей теоремы имеет уравнение
В частности, при а = b получаем уравнение кругового цилиндра

Линию L в пространстве можно задать как пересечение двух данных поверхностей  (рис. 192). Точка
(рис. 192). Точка  , лежащая на линии L, принадлежит как поверхности
, лежащая на линии L, принадлежит как поверхности  так и поверхности
так и поверхности  , и, следовательно, координаты этой точки удовлетворяют уравнениям обеих поверхностей.
, и, следовательно, координаты этой точки удовлетворяют уравнениям обеих поверхностей.
Поэтому под уравнениями линии в пространстве понимается совокупность двух уравнений:

являющихся уравнениями поверхностей, определяющих данную линию.
Не нужно думать, что для нахождения уравнений линий систему (4) следует «решить». Этого, вообще говоря, нельзя сделать, так как число уравнений системы (4) меньше числа неизвестных. Точный смысл, который придается равенствам (4), следующий: линии L принадлежат те и только те точки , координаты которых удовлетворяют обоим уравнениям системы (4).
Заметим, что данную линию можно по-разному задавать как пересечение поверхностей. Поэтому линии в пространстве соответствует бесчисленное множество равносильных между собой систем уравнений.
Определение: Уравнениями линии в пространстве  называется такая пара уравнений между переменными
называется такая пара уравнений между переменными  , которой удовлетворяют координаты каждой точки, лежащей на данной линии, и не удовлетворяют координаты любой точки, не лежащей на этой линии.
, которой удовлетворяют координаты каждой точки, лежащей на данной линии, и не удовлетворяют координаты любой точки, не лежащей на этой линии.
Пример (уравнения координатных осей):
Ось Ох можно, рассматривать как пересечение координатных плоскостей Оху и Oxz. Поэтому

— уравнения оси Ох. Аналогично,
— уравнения осей Оу и Oz соответственно.
Пример:
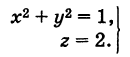
Написать уравнения окружности Г радиуса R = 1, центр которой находится в точке С(0, 0, 2) и плоскость которой параллельна координатной плоскости Оху (рис. 193).
Решение:
Окружность Г можно рассматривать как пересечение кругового цилиндра радиуса 1 с осью Oz и горизонтальной плоскости, расположенной выше координатной плоскости Оху на две единицы. Поэтому уравнения данной окружности есть
В механике линию L часто рассматривают как след движущейся точки (рис. 194). Пусть х, у, z — текущие координаты точки М линии L. Так как с течением времени точка М перемещается и ее координаты меняются, то они являются функциями времени t. Следовательно, имеем

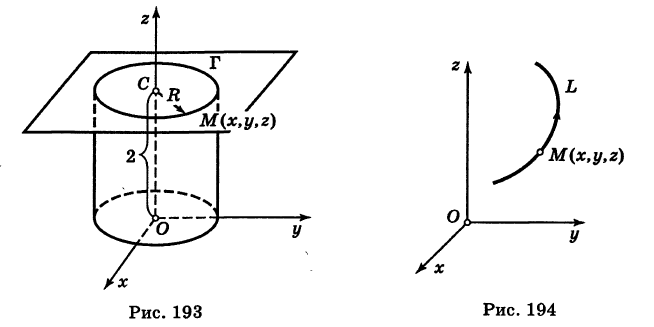
где  — некоторые определенные функции. Обобщая уравнения (5), под t понимают вспомогательную переменную (параметр)> не обязательно время; поэтому уравнения (5) носят название параметрических уравнений линии в пространстве.
— некоторые определенные функции. Обобщая уравнения (5), под t понимают вспомогательную переменную (параметр)> не обязательно время; поэтому уравнения (5) носят название параметрических уравнений линии в пространстве.
Исключая из уравнений (5) параметр t, мы получим два соотношения между текущими координатами х, у и z, которые представляют собой уравнения некоторых поверхностей, проходящих через данную линию.
Пример:
Написать уравнения винтовой линии радиуса а и шага  (рис. 195).
(рис. 195).
Решение:
Пусть М (х, у, z) — текущая точка винтовой линии, М’ (х, у, 0) — ее проекция на плоскость Оху.
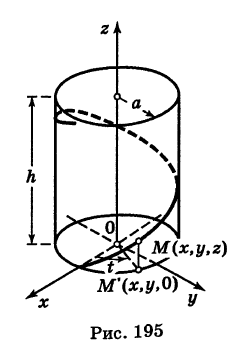
Приняв за параметр  и учитывая, что аппликата г винтовой линии растет пропорционально углу поворота t, будем иметь
и учитывая, что аппликата г винтовой линии растет пропорционально углу поворота t, будем иметь
Для определения коэффициента пропорциональности b положим  ; тогда
; тогда  . Следовательно,
. Следовательно,
Исключая параметр t из первого и второго, а также из первого и третьего уравнений (6), получаем

Следовательно, винтовая линия представляет собой пересечение кругового цилиндра с образующими, параллельными оси Oz, и цилиндрической поверхности с образующими, параллельными оси Оу, и имеющей своей направляющей косинусоиду, лежащую в плоскости  . Из уравнений (6′) также вытекает, что проекция винтовой линии (6′) на координатную плоскость Оху есть окружность, а на координатную плоскость
. Из уравнений (6′) также вытекает, что проекция винтовой линии (6′) на координатную плоскость Оху есть окружность, а на координатную плоскость  — косинусоида.
— косинусоида.
Текущую точку  кривой L можно характеризовать ее радиусом-вектором («следящий радиус-вектор») (рис. 196)
кривой L можно характеризовать ее радиусом-вектором («следящий радиус-вектор») (рис. 196)

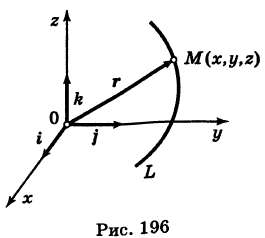
(  — орты). Тогда из (5) получаем векторное уравнение линии
— орты). Тогда из (5) получаем векторное уравнение линии


— так называемая вектор-функция скалярного аргумента t.
В механике в качестве параметра t обычно берут время. В таком случае линию (7) называют траекторией точки М(х, у, z).
Множество всех точек М(х, у, г) пространства, координаты которых удовлетворяют данному уравнению (или системе уравнений), называется геометрическим образом (графиком) данного уравнения (или системы уравнений).
Пример:
Какой геометрический образ соответствует уравнению

Решение:
Из уравнения (8) получаем  или
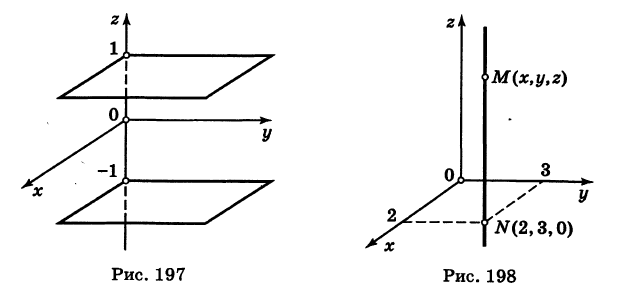
или  . Следовательно, графиком уравнения (8) является пара плоскостей, параллельных координатной плоскости Оху и отстоящих от нее на расстояниях, равных единице (рис. 197).
. Следовательно, графиком уравнения (8) является пара плоскостей, параллельных координатной плоскости Оху и отстоящих от нее на расстояниях, равных единице (рис. 197).
Пример:
Какой геометрический образ соответствует паре уравнений

Решение:
Искомый график представляет собой пересечение плоскостей х = 2 и у = 3 и, следовательно, является прямой линией, параллельной оси Oz и имеющей след N (2, 3, 0) на координатной плоскости Оху (рис. 198).
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Общее уравнение плоскости
- Угол между плоскостями
- Понятие о производной вектор-функции
- Криволинейные интегралы
- Прямоугольная система координат на плоскости и ее применение
- Линии второго порядка
- Полярные координаты
- Непрерывность функции
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Поверхности
Простые поверхности.
Будем говорить, что функция \(f(u, v)\) непрерывно дифференцируема на замкнутом множестве \(E \subset \boldsymbol
Пусть \(\Omega\) — ограниченная область в \(\boldsymbol
$$
x = \varphi(u, v),\quad y = \psi(u, v),\quad z = \chi(u, v),\quad (u, v) \in \overline<\Omega>,\label
$$
называется непрерывно дифференцируемым.
Если при этом в каждой точке \((u, v) \in \Omega\) ранг функциональной матрицы
$$
\begin
$$
равен двум, то отображение \(F: \rightarrow \boldsymbol
Если \(\overline<\Omega>\) есть замкнутое ограниченное множество в \(\boldsymbol
Пусть область \(\Omega\) ограничена простым гладким или кусочно гладким контуром \(\gamma\). Образ кривой \(\gamma\) при гладком отображении \(F: \overline <\Omega>\rightarrow \boldsymbol
Если уравнение кривой \(\gamma\) имеет вид
$$
u = u(t),\quad v = v(t),\quad \alpha \leq t \leq \beta,\nonumber
$$
то уравнение \(\partial\Sigma\) задается следующими формулами:
$$
x = \varphi(u(t), v(t)),\quad y = \psi(u(t), v(t)),\quad z = \chi(u(t), v(t)),\quad \alpha \leq t \leq \beta.\label
$$
График функции \(z = f(x, y)\), непрерывно дифференцируемой на замкнутом ограниченном множестве \(\overline <\Omega>\subset \boldsymbol
$$
x = u,\quad y = v,\quad z = f(u, v),\quad (u, v) \in \overline<\Omega>.\label
$$
В этом случае матрица \(\begin
Например, график функции \(z = x^ <2>+ y^<2>\), \((x, y) \in \overline<\Omega>\), где \(\overline <\Omega>= \ <(x, y): x^<2>+ y^ <2>\leq 1\>\), есть простая поверхность. Окружность, получаемая при пересечении параболоида вращения \(z = x^ <2>+ y^<2>\) и плоскости \(z = 1\), является краем рассматриваемой простой поверхности.
Уравнения \eqref
$$
\boldsymbol
$$
С механической точки зрения формулы \eqref
Имея в виду приложения теории поверхностных интегралов, введем в рассмотрение класс почти простых поверхностей.
Пусть \(\Omega\) — плоская область и \(F: \overline <\Omega>\rightarrow \boldsymbol
Сфера \(S = \ <(x, y, z): x^<2>+ y^ <2>+ z^ <2>= a^<2>\>\) есть почти простая поверхность.
\(\vartriangle\) Введем сферические координаты. Тогда сфера \(S\) есть образ прямоугольника \(\overline <\Omega>= \displaystyle\left\<(\varphi, \psi): 0 \leq \varphi \leq 2\pi,\ -\frac<\pi> <2>\leq \psi \leq \frac<\pi><2>\right\>\) при непрерывно дифференцируемом отображении \(F: \overline <\Omega>\rightarrow S\), определяемом формулами
$$
x = a \cos \varphi \cos \psi,\qquad y = a \sin \varphi \cos \psi,\qquad z = a \sin \psi.\nonumber
$$
Образами отрезков \(\varphi = \varphi_<0>\), \(\displaystyle-\frac<\pi> <2>\leq \psi \leq \frac<\pi><2>\) являются меридианы, а при \(\displaystyle|\psi_<0>|  Рис. 52.1
Рис. 52.1
Конус \(K = \ <(x, y, z): x^<2>+ y^ <2>= z^<2>\>\) есть почти простая поверхность.
\(\vartriangle\) Введем цилиндрические координаты. Тогда конус \(K\) есть образ полуполосы
$$
\overline <\Omega>= \ <(r, \varphi): 0 \leq r  Рис. 52.2
Рис. 52.2
Легко проверить, что \(\overline<\Omega>_
Если \(\Sigma\) есть простая поверхность, заданная векторным уравнением \eqref
$$
u = u(u’, v’),\ v = v(u’, v’),\ (u’, v’) \in \Omega’\nonumber
$$
задают взаимно однозначное отображение замыкания области \(\Omega’\) на замыкание ограниченной области \(\Omega\), причем якобиан отображения
$$
\frac<\partial(u, v)> <\partial(u’, v’)>= \begin
$$
отличен от нуля в \(\overline<\Omega>’\), то уравнение
$$
\boldsymbol
$$
определяет ту же простую поверхность, что и уравнение \eqref
Как и в случае кривых, можно расширить класс параметризаций, допуская и такие замены параметров, при которых непрерывная дифференцируемость, взаимная однозначность и необращение в нуль якобиана отображения нарушаются на границе области. Тогда можно получить такие параметризации простой поверхности, задаваемые функциями, непрерывная дифференцируемость которых не имеет места на границе области \(\Omega\).
\(\vartriangle\) Переход от уравнений \eqref
$$
u = a \cos \varphi \cos \psi,\quad v = a \sin \varphi \cos \psi,\quad (\varphi, \psi) \in \Omega’.\label
$$
Якобиан отображения \eqref
Как правило, в дальнейшем для простых поверхностей будут рассматриваться только такие параметризации, которые задаются непрерывно дифференцируемыми на замкнутом ограниченном множестве функциями.
Криволинейные координаты на поверхности.
Пусть простая поверхность \(\Sigma\) задана векторным уравнением \eqref
$$
\boldsymbol
$$
лежащая на поверхности \(\Sigma\). Будем называть ее координатной кривой \(u = u_<0>\). Придавая \(u_<0>\) все значения из отрезка \([a, b]\), получим семейство координатных кривых \(u = \operatorname
 Рис. 52.3
Рис. 52.3
В силу взаимной однозначности отображения \eqref
Например, в сферических координатах часть сферы \(x^ <2>+ y^ <2>+ z^ <2>= a^<2>\), ограниченная двумя меридианами и двумя параллелями, задается в криволинейных координатах \(\varphi\), \(\psi\) следующим образом:
$$
\varphi_ <1>\leq \varphi \leq \varphi_<2>,\quad \psi_ <1>\leq \psi \leq \psi_<2>.\nonumber
$$
На сфере координатные кривые \(\varphi = \operatorname
На прямом круговом цилиндре координатными линиями будут образующие цилиндра и окружности, получающиеся при пересечении цилиндра плоскостями, перпендикулярными образующей.
Вектор-функция \(\boldsymbol
Если область \(\Omega\) не является выпуклой, а точка \((u_<0>, v_<0>)\) лежит внутри \(\Omega\), то нужно взять выпуклую окрестность точки \((u_<0>, v_<0>)\), лежащую внутри \(\Omega\). Тогда образ этой выпуклой окрестности будет куском поверхности \(\Sigma\) и координатные кривые можно строить на этом куске поверхности (локально).
Касательная плоскость и нормаль к поверхности.
Пусть \(\Sigma\) есть простая поверхность, заданная уравнениями \eqref
В любой точке \(A(u, v)\) простой поверхности \(\Sigma\) векторы \(\boldsymbol
\(\circ\) Рассмотрим вектор \(N = [\boldsymbol
$$
\boldsymbol
$$
Если \(\boldsymbol
$$
\boldsymbol
$$
то есть
$$
\boldsymbol
$$
Так как якобиан \(J = \displaystyle\frac<\partial(u, v)><\partial(u’, v’)>\) не обращается в нуль в области \(\Omega’\), то векторы \(\boldsymbol
Вектор нормали к простой поверхности \(\Sigma\) в точке \(A(u_<0>, v_<0>)\) ортогонален ко всем гладким кривым, лежащим на поверхности и проходящим через точку \(A(u_<0>, v_<0>)\).
\(\circ\) В самом деле, такая кривая есть образ при отображении \eqref
Уравнение кривой на поверхности тогда имеет вид
$$
\boldsymbol
$$
Касательный вектор \(\boldsymbol<\tau>\) к этой кривой в точке \(A\) есть
$$
\boldsymbol <\tau>= \frac
$$
Итак, \(\boldsymbol<\tau>\) есть линейная комбинация векторов \(\boldsymbol
Плоскость, проходящая через точку \(A(u, v)\) поверхности и ортогональная вектору \(\boldsymbol
$$
(\boldsymbol
$$
В силу равенства \eqref
$$
\begin
$$
Нормалью к поверхности в точке \(A(u, v)\) называется прямая, проходящая через точку \(A\) и параллельная вектору нормали в точке \(A\). Так как при изменении параметризации вектор нормали не меняет своего направления или изменяет его на противоположное в каждой точке поверхности, то нормаль не зависит от параметризации. Ее векторное уравнение имеет вид
$$
\boldsymbol
Кусочно гладкие поверхности.
Из определения простой поверхности, данного в п. 1, следует, что она есть гладкий и взаимно однозначный образ некоторой плоской области, то есть получается из этой области при помощи гладких (без изломов) деформаций (отображений). Ясно, что многие объекты, которые мы привыкли называть поверхностями, не будут простыми поверхностями. Так, сфера не может быть непрерывным образом деформирована в плоскую область. Коническая поверхность не может быть получена гладкой деформацией плоской области.
Попытки дать общую классификацию поверхностей увели бы нас далеко в область высшей геометрии. Замечательным классом поверхностей в \(\boldsymbol Рис. 52.4
Рис. 52.4
Из гладких кусков можно склеивать не только гладкие многообразия, но и связные поверхности, имеющие ребра и вершины (например, поверхности многогранников) (рис. 52.5).
 Рис. 52.5
Рис. 52.5
Мы не станем тут заниматься математической формализацией таких понятий, как разрезание и склеивание поверхностей, и тем более основанной на этом классификации поверхностей. Заметим только, что трудности возникают при построении общих теорий. В любом разумном частном случае нет проблем с разрезанием поверхности на простые куски. Поверхность, которую можно разрезать на конечное число простых кусков, будем называть кусочно гладкой.
Ориентируемые поверхности.
Будем говорить, что гладкая поверхность ориентируема, если можно построить на этой поверхности непрерывное поле единичных нормальных векторов. Говорят, что это поле единичных нормалей определяет ориентацию (или сторону) поверхности. Меняя направление всех единичных нормалей на противоположное, получим опять непрерывное поле единичных нормальных векторов. Говорят, что оно определяет противоположную ориентацию (другую сторону) поверхности. На простой гладкой поверхности всегда определено непрерывное поле единичных нормальных векторов
$$
\boldsymbol
$$
Произвольные гладкие поверхности могут быть как ориентируемыми (двусторонними), так и неориентируемыми (односторонними).
Торы, изображенные на рис. 52.4, ориентируемы; бутылка Клейна — неориентируемая (односторонняя) поверхность. Легко построить лежащий на этой поверхности замкнутый гладкий контур такой, что, выбирая в какой-то точке контура вектор единичной нормали к поверхности и непрерывно изменяя его при движении по контуру, мы придем к начальной точке с противоположным направлением нормали. Следовательно, на бутылке Клейна построить непререрывное поле единичных нормальных векторов невозможно.
Заметим еще, что сфера, тор, тор с двумя дырами (рис. 52.4) делят пространство на ограниченную и неограниченную области, общей границей которых они являются. Бутылка Клейна таким свойством не обладает.
Можно доказать, что гладкая поверхность, являющаяся границей области в \(\boldsymbol
 Рис. 52.6
Рис. 52.6
Каждая плоскость делит пространство \(\boldsymbol
 Рис. 52.7
Рис. 52.7
Границу области \(G\), ориентированную внешними нормалями, будем обозначать через \(\partial G\), а внутренними — через \(\partial G^<->\).
Несколько более сложно определяется ориентация кусочно гладких поверхностей.
 Рис. 52.8
Рис. 52.8
Пусть \(\Sigma\) — простая поверхность (рис. 52.8), то есть гладкий и взаимно однозначный образ замыкания плоской области \(\Omega\). В декартовых координатах отображение задается равенствами \eqref
$$
\boldsymbol
$$
согласована с положительной ориентацией простых контуров, лежащих на поверхности \(\Sigma\).
 Рис. 52.9
Рис. 52.9
Покажем, что предложенное правило согласования ориентации поверхности с ориентациями простых контуров, лежащих на поверхности, совпадает с известным правилом правого винта. Пусть \(A(u_<0>, v_<0>) \in \Sigma\), то есть \((u_<0>, v_<0>) \in \Omega\). Без ограничения общности можно считать, что \(u_ <0>= 0\), \(v_ <0>= 0\). Построим в точке \(A\)(0,0) касательную плоскость и ориентируем ее вектором нормали \(\boldsymbol
$$
u = \varepsilon \cos t,\ v = \varepsilon \sin t,\ 0 \leq t \leq 2\pi.\nonumber
$$
Ее образ на поверхности есть простой замкнутый контур \(\Gamma\):
$$
\boldsymbol
$$
С точностью до \(\boldsymbol
$$
\boldsymbol
$$
С точностью до \(\boldsymbol
Ориентация эллипса положительна (рис. 52.10). Если смотреть на касательную плоскость со стороны вектора нормали \(\boldsymbol
 Рис. 52.10
Рис. 52.10
Пусть кусочно гладкая поверхность \(\Sigma\) склеена из гладких простых кусков \(\Sigma_<1>,\ \Sigma_<2>,\ \ldots,\ \Sigma_
 Рис. 52.11
Рис. 52.11
Можно показать, что кусочно гладкая поверхность, являющаяся границей ограниченной области, ориентируема, при этом каждый ее гладкий кусок можно ориентировать внутренними нормалями. В дальнейшем мы будем рассматривать только ориентируемые гладкие и кусочно гладкие поверхности.
http://www.evkova.org/uravneniya-poverhnosti-i-linii-v-prostranstve
http://univerlib.com/mathematical_analysis/curve_surface_integrals/surfaces/