Проверка основного закона динамики вращательного движения
Страницы работы
Содержание работы
Лабораторная работа № 4
Проверка основного закона динамики вращательного движения.
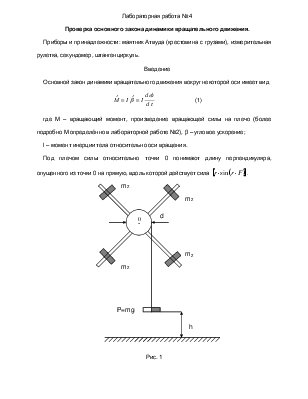
Приборы и принадлежности: маятник Атвуда (крестовина с грузами), измерительная рулетка, секундомер, штангенциркуль.
Введение
Основной закон динамики вращательного движения вокруг некоторой оси имеет вид
 (1)
(1)
где М – вращающий момент, произведение вращающей силы на плечо (более подробно М определённо в лабораторной работе №2), β – угловое ускорение;
I – момент инерции тела относительно оси вращения.
Под плечом силы относительно точки 0 понимают длину перпендикуляра, опущенного из точки 0 на прямую, вдоль которой действует сила  .
.
Рис. 1
Моментом инерции материальной точки относительно данной оси вращения называется произведение массы этой точки на квадрат расстояния от нее до данной оси вращения.
Обозначим массу материальной точки mI, расстояние её от оси вращения rI ; момент инерции её относительно оси вращения: mI rI 2 .
Моментом инерции I твёрдого тела относительно какой – либо оси называется сумма моментов инерции всех материальных точек данного тела относительно той же оси  .
.
Момент инерции тела в динамике вращательного движения играет такую же роль, как масса тела в динамике поступательного движения, то есть является мерой инерции тела и характеризует распределение масс относительно оси вращения.
Из уравнения (1) следует, что ускорение  , сообщаемое телу вращающим моментом, зависит от момента инерции тела: чем больше момент инерции, чем больше I, тем меньше угловое ускорение.
, сообщаемое телу вращающим моментом, зависит от момента инерции тела: чем больше момент инерции, чем больше I, тем меньше угловое ускорение.
Отсюда следует, что, если вращающий момент М = const остаётся постоянным, то отношение угловых ускорений будет обратно пропорционально моментам инерции этих тел:
 (2)
(2)
Целью настоящей работы является проверка основного закона динамики вращательного движения (1) на основе определения соотношение между угловыми ускорениями и моментами инерции (2).
Описание установки
Основной частью прибора (см. рисунок) является крестовина с четырьмя одинаковыми грузами mr (положение которых можно измерять относительно оси вращения) шкива прикрепленной к ней нитью, на конце которой может быть подвешена гирька Р (массой m). Когда груз Р, подвешенный к нити, опускается, нить разматывается и приводит всю систему в равноускоренное вращательное движение.
Если гирька Р будет находится на некоторой высоте от пола, то её потенциальная энергия En=m g h. Под действием силы тяжести маятник Атвуда начинает вращаться и потенциальная энергия гирьки Еn переходит в кинетическую энергию поступательного движения Wk и кинетическую энергию вращающейся крестовины Wвр. При малости сил сопротивления на уровне пола будет справедливо следующее равенство:
 (3)
(3)
Угловая скорость маховика  и линейная скорость V гирьки соответствуют моменту удара об пол, при этом
и линейная скорость V гирьки соответствуют моменту удара об пол, при этом  .
.
Так как нить намотана на шкив, то очевидно, что скорость поступательного движения гирьки всегда равна линейной скорости вращающегося шкива, поэтому  , где r – радиус шкива.
, где r – радиус шкива.
Используя формулу для равноускоренного движения без начальной скорости
 .
.
Подставляя эти значения в формулу (3), получаем  , откуда момент инерции
, откуда момент инерции
 (4)
(4)
В рабочую формулу (4) входят, величины измеряемые в опыте, и  .
.
Момент инерции крестовины определяется для двух положений грузов mr на концах стержней и на их середине при постоянном вращающем моменте.
В этом случае выполняется соотношение (2).
Принимая во внимание, что линейное ускорение точки связано с угловым ускорением соотношением a=β r, определим линейное ускорение гирьки для двух положений грузиков на крестовине:
тогда уравнение (2) можно преобразовать к виду
 (5)
(5)
и проверка основного закона динамики вращательного движения сводится к проверке выполнения равенства (5).
Лабораторная работа 1-05 проверка основного уравнения динамики вращательного движения при вращении тел вокруг неподвижной оси

ЛАБОРАТОРНАЯ РАБОТА 1-05
ПРОВЕРКА ОСНОВНОГО УРАВНЕНИЯ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ПРИ ВРАЩЕНИИ ТЕЛ ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Цель работы: изучение динамики вращательного движения, экспериментальное подтверждение основного уравнения динамики вращательного движения вокруг неподвижной оси и справедливости теоремы Гюйгенса–Штейнера.
Приборы и принадлежности: крестообразный маятник Обербека, снабженный электронным секундомером, набор грузов определенной массы, прибор для измерения длины.
ВВЕДЕНИЕ
Основное уравнение динамики вращательного движения имеет следующий вид:
 , (1)
, (1)
где L = Jw — момент импульса вращающегося тела; J – момент его инерции относительно оси вращения; w — угловая скорость вращения и М = [r,F] – момент силы. Дифференцируя последнее равенство, получим
 . (2)
. (2)
Если вращение осуществляется вокруг неподвижной оси и если момент инерции остается постоянным, то уравнение (2) примет вид
 . (3)
. (3)
Здесь Jz и Мz – момент инерции и момент силы относительно неподвижной оси z. Угловое ускорение e связано с линейным ускорением точек, расположенных на расстоянии r от оси вращения, уравнением
Линейное ускорение, в свою очередь, связано с перемещением h и временем перемещения t, при условии, что начальная скорость перемещения равна нулю
 . (5)
. (5)
Моменты инерции простых тел относительно оси, проходящей через центр масс, известны. Теорема Гюйгенса–Штейнера позволяет определить момент инерции относительно любой другой оси, если она параллельна оси, проходящей через центр масс
 , (6)
, (6)
где J0 – момент инерции относительно оси, проходящей через центр масс; m – масса тел; R – расстояние между осями.
Приведенные зависимости позволяют решить поставленную задачу.
 Схема маятника Обербека приведена на рис. 1. Два шкива различных диаметров 1 и 2 могут легко вращаться вокруг неподвижной оси 3. Шкивы соединены плотной шайбой, в боковой поверхности которой закреплены симметрично четыре спицы 4, расположенные под прямым углом друг к другу. На спицы можно надевать грузы (mгр), которые могут перемещаться вдоль спиц 4. При этом изменяется момент инерции маятника, который зависит от расстояния R между центрами грузов и осью вращения. На один из шкивов 1 или 2 намотана нить, к концу которой привязана платформа 6 известной массы m0. На эту платформу можно помещать грузы различной массы mi 7. В зависимости от массы этого груза изменяется вращающий момент. Нить перекинута через блок 8 с указателем 9. Расстояние между указателем 9 и основанием прибора определяет высоту h падения платформы с соответствующим грузом mi. Выключатель 10 служит для освобождения груза с платформой и для запуска (остановки) секундомера.
Схема маятника Обербека приведена на рис. 1. Два шкива различных диаметров 1 и 2 могут легко вращаться вокруг неподвижной оси 3. Шкивы соединены плотной шайбой, в боковой поверхности которой закреплены симметрично четыре спицы 4, расположенные под прямым углом друг к другу. На спицы можно надевать грузы (mгр), которые могут перемещаться вдоль спиц 4. При этом изменяется момент инерции маятника, который зависит от расстояния R между центрами грузов и осью вращения. На один из шкивов 1 или 2 намотана нить, к концу которой привязана платформа 6 известной массы m0. На эту платформу можно помещать грузы различной массы mi 7. В зависимости от массы этого груза изменяется вращающий момент. Нить перекинута через блок 8 с указателем 9. Расстояние между указателем 9 и основанием прибора определяет высоту h падения платформы с соответствующим грузом mi. Выключатель 10 служит для освобождения груза с платформой и для запуска (остановки) секундомера.
МЕТОДИКА ПРОВЕРКИ ОСНОВНОГО ЗАКОНА
Возможны два способа проверки основного закона динамики вращательного движения тел вокруг неподвижной оси:
а) установить линейную зависимость
б) установить линейную зависимость
а) Первый способ.
Груз mi, помещенный на платформу 6, создает вращающий момент Mi = = T × r, где Т – сила натяжения нити и r – радиус шкива, на который намотана нить. По второму закону Ньютона
где а – ускорение падающего груза с платформой. Момент силы натяжения равен
Сумма моментов сил, действующих на шкив:
Mi – Mтр = m(g – a)r – Mтр.= J× ,
,
где Мтр – момент силы трения
Здесь m = m0 + mi – масса платформы 6 с грузом 7.
В соответствии с теоремой Гюйгенса–Штейнера момент инерции крестовины с надетыми на спицы грузами mгр, равен
Суммарная масса крестовины со стержнями и надетыми на них грузами много больше массы груза с платформой. Кроме того, r mmin. Результаты внесите в табл. 1. Внизу таблицы запишите значение радиуса r того шкива, на котором намотана нить.
3. Установите на платформе груз mi > mmin. Не меняйте этот груз в течение всего опыта (M = const). В опыте изменяют момент инерции перемещением грузов mгр по спицам, изменяя расстояние R. При каждом значении R определите три раза время падения груза с платформой с высоты h. Результаты внесите в табл. 2.
Работа 13. ИЗУЧЕНИЕ ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Задание: Экспериментально проверить основной закон динамики вращательного движения. Определить момент инерции маятника Обербека без цилиндров с предельной относительной погрешностью E, не превышающей 5 %.

Оборудование и принадлежности: установка для проведения измерений, штангенциркуль.
Для изучения вращательного движения используется маятник Обербека рис. 1. Он состоит из четырех взаимно перпендикулярных стержней 1, укрепленных на втулке. Втулка и два шкива различных радиусов насажены на общую ось. Ось закреплена в подшипниках, так что вся система может свободно вращаться вокруг горизонтальной оси. На стержни надеваются цилиндры 2 массой MЦ, которые могут перемещаться и закрепляться посредством винтов на любом расстоянии от оси вращения. Момент инерции маятника можно изменять, передвигая грузы вдоль стержней. На один из шкивов маятника навита тонкая нить 3, на конце которой находится груз 4 массы M. Момент силы создаваемый грузом служит для приведения маятника во вращательное движение. Груз удерживается в неподвижном состоянии с помощью фрикционной муфты, приводимой в действие электромагнитом 5. Подвижный кронштейн 6 можно перемещать вдоль колонки и фиксировать в любом положении, изменяя таким образом высоту падения груза. Для отсчета высоты на колонке нанесена шкала 7. На подвижном кронштейне 6 установлен фотоэлектрический датчик, импульсы которого служат для запуска миллисекундомера. На нижнем неподвижном кронштейне 7 закреплен фотоэлектрический датчик 8, вырабатывающий электроимпульс конца измерения времени, включающий тормозной электромагнит.
Перед началом работы необходимо с помощью регулируемых ножек основания прибора установить колонку в вертикальное положение. Установить подвижный кронштейн на выбранную высоту, чтобы грузы, падая, проходили через середину рабочего окна фотоэлектрических датчиков. При этом нижний край грузов Должен совпадать с чертой на корпусе верхнего фотоэлектрического датчика.
Общие сведения. При вращательном движении твердого тела вокруг неподвижной оси все его точки описывают окружности, центры которых лежат на оси вращения. Линейные физические величины – перемещение, скорость и ускорение –различны для разных точек. Поэтому для изучения вращательного движения вводят угловые величины, одинаковые для всех точек тела. Связь между линейными и угловыми величинами имеет вид:


 (1)
(1)
Где DS – пройденный путь, DJ – угловое перемещение, V – линейная скорость, AR – тангенциальное ускорение, W – угловая скорость, R – расстояние до оси вращения или радиус вращения точки, E – угловое ускорение.
Для вывода основного уравнения динамики вращательного движения твёрдого тела вокруг неподвижной оси мысленно разобьем тело на совокупность материальных точек массами Mi, находящимися на расстояниях Ri от оси вращения (рис. 2).

Пусть на точку Mi действует сила  , которая представляет равнодействующую всех приложенных внутренних и внешних сил
, которая представляет равнодействующую всех приложенных внутренних и внешних сил
 (2)
(2)
Внутренние силы взаимодействия удерживают точки твердого тела на определенных расстояниях друг от друга. По второму закону Ньютона ускорение данной  точки
точки  Связано с силой Fi Соотношением
Связано с силой Fi Соотношением
 (3)
(3)
Спроецируем (3) на направление касательной к траектории точки. Учитывая (1), получим
 (4)
(4)
Умножив (4) на Ri, получим:
 (5)
(5)
Где  – момент силы, действующей на I–тую точку относительно оси вращения. Поскольку, согласно (2), сила
– момент силы, действующей на I–тую точку относительно оси вращения. Поскольку, согласно (2), сила  есть сумма двух сил, то ее момент равен сумме моментов внешней и внутренней сил
есть сумма двух сил, то ее момент равен сумме моментов внешней и внутренней сил
 (6)
(6)
Просуммировав (6) по всем точкам, получим:
 (7)
(7)
Согласно третьему закону Ньютона каждой внутренней силе в системе соответствует сила, равная ей по величине, противоположная по направлению и направленная по одной и той же прямой:  (рис. 3). Моменты этих сил попарно равны по величине и противоположны по направлению. Поэтому очевидно, что сумма моментов всех внутренних сил равна нулю:
(рис. 3). Моменты этих сил попарно равны по величине и противоположны по направлению. Поэтому очевидно, что сумма моментов всех внутренних сил равна нулю:

 (8)
(8)
 (9)
(9)
– результирующий момент внешних сил.
В правую часть уравнения (7) входит сумма
 (10)
(10)
Которая называется моментом инерции тела относительно оси вращения. Момент инерции тела J численно равен сумме произведений масс всех его материальных точек на квадраты их расстояний до оси вращения. Для сплошного тела суммирование можно заменить интегрированием по объёму тела:
 (11)
(11)
Уравнение (7) с учетом (8), (9) и (10) примет вид:
 (12)
(12)
Соотношение (12) выражает основной закон динамики вращательного движения. Оно позволяет выяснить физический смысл момента инерции: Момент инерции является мерой инертности тела при вращательном движении. Это уравнение является следствием законов Ньютона. Поэтому его экспериментальная проверка является в то же время проверкой основных положений механики.
Теория метода: Для проверки основного уравнения динамики вращательного движения необходимо определять три величины: угловое ускорение E, момент сил М и момент инерции J маятника относительно оси вращения (см. рис. 1). При безразличном равновесии маятника его вращение под действием постоянного натяжения нити будет равноускоренным.
Если груз M опускается с высоты H за время T, то его ускорение
 (13)
(13)
Таким же будет ускорение любой точки поверхности шкива. Тогда
 (14)
(14)
Где RО – радиус шкива. Момент сил M = RОT, где T— сила натяжения нити. Сила Т определяется из второго закона Ньютона для опускающегося груза M:
Тогда сила натяжения нити
 (16)
(16)
Момент силы натяжения:
 (17)
(17)
При значительных силах трения FТр и их момента Mтр уравнение (12) примет вид:
Момент инерции маятника J состоит из суммы моментов инерции вала со шкивами JВ, стержня Jc и цилиндров JЦ:
Расчет моментов инерции полых цилиндров относительно произвольной оси дает (см. Приложение 1):
 (20)
(20)
Где MЦ – масса цилиндра; D – расстояние от оси вращения до центра масс цилиндра; L – его длина; R1 и R2 – внутренний и внешний радиусы.
Экспериментально момент инерции маятника определяется согласно (12,14) и (17):
 (21)
(21)
Момент инерции маятника со снятыми цилиндрами: JО = JВ + Jc
Тоже находится по (21). Тогда экспериментальное значение моментов инерции цилиндров при любом их положении на стержнях, согласно (21):
 (22)
(22)
Порядок выполнения задания
1. Снять цилиндры. С малым шкивом и минимальным значением массы груда провести контрольные измерения величин Ro, M, H, T, входящих в правую часть равенства (21), для выбранного значения H (около 40 см).
2. Оценить минимальную относительную погрешность прямых измерений величин Ro, M, H, T.
3. Оценить минимальную относительную погрешность косвенных измерений момента инерции маятника со снятыми цилиндрами Jo.
4. Провести повторные измерения Ro, T. Оценить случайную относительную погрешность прямых измерений этих величин. Сравнить ее с минимальной относительной погрешностью и сделать выводы о необходимом числе повторных измерений. Оценить полную относительную погрешность прямых измерений величин Ro, T.
5. По формуле (21) определить Jo.
6. Оценить полную относительную погрешность E косвенных измерений момента инерции маятника со снятыми цилиндрами Jo.
7. Для четырёх значений массы груза M и большого шкива измерить T, оставляя H неизменным. По (14), (17), (21) определить E, М, Jo. Результаты занести в таблицу 1.
8. Построить график E = F(M). По графику определить момент силы трения Мтр и момент инерции маятника без цилиндров Jo. Сравнить Jo с полученными ранее значениями.
9. Повторить опыт для разных значений момента инерции системы, получающихся при различном положении цилиндров относительно оси вращения при постоянной (лучше большей) массе груза M и высоте H. По формуле (21) определить J. Результаты занести в таблицу 2.
Результаты измерений и расчётов для определения E, М, Jo
http://pandia.ru/text/78/002/45210.php
http://webpoliteh.ru/rabota-13-izuchenie-dinamiki-vrashhatelnogo-dvizheniya/