Равномерное движение
Равномерное движение
Равномерное движение — движение вдоль прямой линии с постоянной (как по модулю, так и по направлению) скоростью. При равномерном движении пути, которые тело проходит за равные промежутки времени, также равны.
Для кинематического описания движения расположим ось OХ вдоль направления движения. Для определения перемещения тела при равномерном прямолинейном движении достаточно одной координаты Х. Проекции перемещения и скорости на координатную ось можно рассматривать, как алгебраические величины.
Пусть в момент времени t 1 тело находилось в точке с координатой x 1 , а в момент времени t 2 — в точке с координатой x 2 . Тогда проекция перемещения точки на ось OХ будет запишется в виде:
В зависимости от направления оси и направления движения тела эта величина может быть как положительной, так и отрицательной. При прямолинейном и равномерном движении модуль перемещения тела совпадает с пройденным путем. Скорость равномерного прямолинейного движения определяется по формуле:
v = ∆ s ∆ t = x 2 — x 1 t 2 — t 1
Если v > 0 , тело движется вдоль оси OX в положительном направлении. Иначе — в отрицательном.
Математическое описание равномерного прямолинейного движения
Закон движения тела при равномерном прямолинейном движении описывается линейным алгебраическим уравнением.
Уравнение движения тела при равномерном прямолинейном движении
x ( t ) = x 0 + v t
v = c o n s t ; x 0 — координата тела (точки) в момент времени t = 0 .
Пример графика равномерного движения — на рисунке ниже.
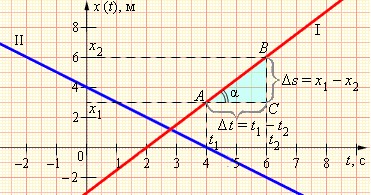
Здесь два графика, описывающих движение тел 1 и 2. Как видим, тело 1 во время t = 0 находилось в точке x = — 3 .
От точки x 1 до точки x 2 тело переместилось за две секунды. Перемещение тела составило три метра.
∆ t = t 2 — t 1 = 6 — 4 = 2 с
Зная это, можно найти скорость тела.
v = ∆ s ∆ t = 1 , 5 м с 2
Есть еще один способ определения скорости: из графика ее можно найти как отношение сторон BC и AC треугольника ABC.
v = ∆ s ∆ t = B C A C .
Причем, чем больше угол, который образует график с осью времени, тем больше скорость. Говорят также, что скорость равна тангенсу угла α .
Аналогично вычисления проводятся для второго случая движения. Рассмотрим теперь новый график, изображающий движение с помощью отрезков прямых. Это так называемый кусочно-линейный график.
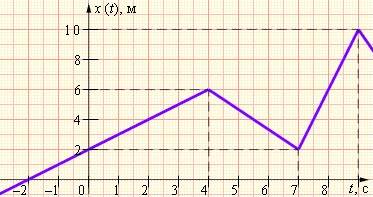
Движение, изображенное на нем — неравномерное. Скорость тела меняется мгновенно в точках излома графика, а каждый отрезок пути до новой точки излома тело движется равномерно с новой скоростью.
Из графика мы видим, что скорость менялась в моменты времени t = 4 c , t = 7 с , t = 9 с . Значения скоростей также легко находятся из графика.
Отметим, что путь и перемещение не совпадают для движения, описываемого кусочно-линейным графиком. Например, в интервале времени от нуля до семи секунд тело прошло путь, равный 8 метрам. Перемещение тела при этом равно нулю.
Методическая разработка на тему Кинематика
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Выберите документ из архива для просмотра:
Выбранный для просмотра документ Лекция Кинематика.doc
Лекция №1: « Кинематика материальной точки»
1.Основные понятия кинематики
2.Кинематические характеристики поступательного движения материальной точки
2.1 Путь, перемещение
2.2 Скорость средняя и мгновенная
2.3 Ускорение и его составляющие
2.4 Кинематические уравнения основных видов движения
2.4.1 Кинематические уравнения прямолинейного равномерного движения
2.4.2 Кинематические уравнения равноускоренного движения
3.Кинематические характеристики вращательного движения материальной точки
3.1 Угловой путь
3.2 Угловая скорость (средняя и мгновенная)
3.3 Угловое ускорение (среднее и мгновенное)
3.4 Период, частота
4. Кинематические уравнения основных видов движения по окружности
4.1 Кинематическое уравнение равномерного движения по окружности
4.2 Кинематическое уравнение равноускоренного движения по окружности
5.Связь между линейными и угловыми кинематическими характеристиками
1.Основные понятия кинематики
Часть физики, изучающая механическое движение тел, называется механикой. Основные законы механики установлены Галилео Галилеем ( G . Galilei 1564-1642) и окончательно сформулированы Исааком Ньютоном ( I . Newton 1643-1727). Механику Галилея-Ньютона называют классической механикой. В ней изучаются законы движения макроскопических тел (это все окружающие нас тела) со скоростями, малыми по сравнению со скоростью света. Более общей теорией, в которой описываются и микроскопические тела (например, элементарные частицы) является, квантовая механика. Движение макроскопических тел с любыми скоростями, в том числе и со скоростями, сравнимыми со скоростью света, рассматривает релятивистская механика. Механика делится на 3 раздела: кинематику, динамику и статику.
Раздел физики, в котором механическое движение изучается без рассмотрения причин, определяющих характер движения, называется кинематикой. Основная задача кинематики – определение положения тела в пространстве и характеристик его движения в любой момент времени.
Механическим движением называют изменение с течением времени положения тела в пространстве.
Основными видами механического движения являются поступательное и вращательное движения.
Поступательным движением называется движение, при котором любая прямая, связанная с движущимся телом, остаётся параллельной самой себе. При поступательном движении все точки тела движутся одинаково, поэтому можно рассматривать движение тела независимо от его размеров и формы, как движение одной точки тела.
Вращательным движением называют движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной прямой, называемой осью вращения.
Простейшей моделью тела является материальная точка. Материальной точкой называется обладающее массой тело, размерами которого можно пренебречь в данной задаче. Если размерами тела пренебречь нельзя, то его можно представить как совокупность материальных точек, рассматриваемых как единое целое, — то есть как систему материальных точек. В процессе движения расстояние между точками, составляющими тело, может меняться – в этом случае говорят о деформации тела. Если при рассмотрении движения деформация тела незначительна (ею можно пренебречь), тогда в качестве модели тела можно использовать модель абсолютно твердого тела. Абсолютно твердым телом называется тело, расстояние между двумя любыми точками которого не изменяется.
Для описания механического движения (изменение положения тела) вводят систему отчета. Системой отсчета называют тело отсчета, относительно которого определяется положение всех других тел, и связанные с этим телом часы.
Д ля определения положения материальной точки введем радиус-вектор материальной точки r – вектор, проведенный из начала отсчета (начала системы координат) в рассматриваемую материальную точку. Проекции радиус-вектора на оси OX , OY , OZ равны декартовым координатам точки
ля определения положения материальной точки введем радиус-вектор материальной точки r – вектор, проведенный из начала отсчета (начала системы координат) в рассматриваемую материальную точку. Проекции радиус-вектора на оси OX , OY , OZ равны декартовым координатам точки  = x , r
= x , r  = y , r
= y , r  = z .
= z .
При движении материальной точки её координаты с течением времени изменяются. В общем случае её движение определяется скалярными уравнениями:

 ,
,
Эти уравнения называются кинематическими уравнениями движения материальной точки.
2.Кинематические характеристики поступательного
движения материальной точки.
При движении точка (конец радиус-вектора) описывает некоторую линию – траекторию движения.
Траектория движения материальной точки – линия, представляющая собой совокупность точек, через которые прошла материальная точка в процессе её движения. В зависимости от формы линии траектория может быть прямолинейной или криволинейной.
Для описания движения введем физические величины, которыми будем характеризовать движение, они называются кинематическими характеристиками.
2.1 Путь, перемещение.
Путь S , пройденный материальной точкой – скалярная величина, равная длине участка траектории, который прошла точка за данный промежуток времени.
Перемещение 
 за время
за время  — вектор, соединяющий некоторое положение точки с её положением спустя время
— вектор, соединяющий некоторое положение точки с её положением спустя время  :
:

При неравномерном движении – модуль мгновенной скорости с течением времени изменяется. Длина пути в данном случае вычисляется по формуле:
 ,
,  .
.
2.2 Скорость средняя и мгновенная
Для характеристики движения материальной точки вводится векторная величина – скорость, которая определяет быстроту движения и направление в данный момент времени.

Средняя скорость – это векторная величина, численно равная отношению приращения радиус вектора к промежутку времени за который это приращение произошло :
 ,
,  .
.
Направление вектора средней скорости совпадает с направлением радиус-вектора.
Мгновенная скорость – это векторная величина, численно равная пределу отношения перемещения к промежутку времени при стремлении данного промежутка к нулю, или является первой производной перемещения по времени:
 , .
, . 
2.3 Ускорение и его составляющие
Скорость материальной точки  может изменяться со временем как по величине, так и по его направлению. Быстрота изменения скорости характеризуется ускорением.
может изменяться со временем как по величине, так и по его направлению. Быстрота изменения скорости характеризуется ускорением.
Среднее ускорение – это векторная физическая величина, численно равная отношению изменения скорости к промежутку времени, за который это изменение произошло:
 ,
,  .
.
Мгновенное ускорение – это векторная величина, численно равная пределу отношения изменения скорости к промежутку времени при стремлении данного промежутка к нулю, или является первой производной скорости по времени, или второй производной перемещения по времени:
 ,
, 
При равномерном движении по окружности ускорение разлагается на две составляющие: нормальную и тангенциальную.

Тангенциальная составляющая ускорения характеризует быстроту изменения скорости по модулю и направлена по касательной к траектории:
 .
.
Нормальная составляющая ускорения характеризует быстроту изменения скорости по направлению и направлена к центру кривизны траектории:  , r — радиус кривизны траектории.
, r — радиус кривизны траектории.
Полное ускорение – геометрическая сумма тангенциальной и нормальной составляющих:
 , или в скалярном виде:
, или в скалярном виде: .
.
2.4 Кинематические уравнения основных видов движения.
Рассмотрим частные случаи движения материальной точки, определяемые свойствами кинематических характеристик, и получим для этих случаев кинематические уравнения – зависимости кинематических характеристик от времени.
2.4.1.Равномерное прямолинейное движение  ,
,  .
.
По определению  или
или  . Интегрируя левую часть от
. Интегрируя левую часть от  до
до  и правую часть от
и правую часть от  до ,
до ,  , получаем
, получаем  , или
, или  .
.
Полученная зависимость радиус-вектора от времени вместе с выражениями, , представляют собой кинематические уравнения прямолинейного равномерного движения в векторном виде. Если ось OX направить вдоль направления скорости (вдоль траектории, которая прямолинейна), то уравнение для радиус-вектора в проекции на эту ось будет иметь вид  , а путь, пройденный к моменту времени , будет определяться
, а путь, пройденный к моменту времени , будет определяться  .
.
2.4.2Равноускоренное движение 
По определению  или
или  . Интегрируя
. Интегрируя  , получаем:
, получаем:  или
или  . Далее учтем, что , следовательно,
. Далее учтем, что , следовательно,  . Интегрируя левую и правую части, получим
. Интегрируя левую и правую части, получим  .
.
Таким образом, в векторной форме кинематические уравнения равноускоренного движения имеют вид:
 ,
,  ,
,  .
.
Одним из видов равноускоренного движения является свободное падение. Кинематические уравнения свободного падения имеют вид:
 ,
,  ,
,  .
.
П римером равноускоренного движения является баллистическое движение без учета сопротивления воздуха – свободное движение тел в поле силы тяжести, в проекциях на оси X и Y кинематические уравнения примут вид:
римером равноускоренного движения является баллистическое движение без учета сопротивления воздуха – свободное движение тел в поле силы тяжести, в проекциях на оси X и Y кинематические уравнения примут вид:


Для тела, брошенного с начальной скоростью  под углом
под углом  к горизонту из начала координат, кинематические уравнения запишутся в виде:
к горизонту из начала координат, кинематические уравнения запишутся в виде:

 и
и  .
.
Траектория движения будет параболой, описываемой уравнением:
 .
.
Из кинематических уравнений могут быть получены параметры полета тела: время полета  , высота подъема
, высота подъема  , дальность полета
, дальность полета  :
:
 ,
,  ,
,  .
.
3. Кинематические характеристики вращательного
движения материальной точки
3.1 Угловой путь
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси. Тогда отдельные точки этого тела будут описывать окружности разных радиусов, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R . Её положение через промежуток времени зададим углом  .
.
Угловой путь – это элементарный угол поворота:
 ,
,  .
.
Радиан – это угол, который вырезает на окружности дугу, равную радиусу.

Направление углового пути определяется правилом правого винта: если головку винта вращать в направлении движения точки по окружности, то поступательное движение острия винта укажет направление  .
.
Векторы, направления которых связываются с направлением вращения, называются псевдовекторами или аксиальными векторами. Эти векторы не имеют определенных точек приложения, они могут откладываться от любой точки оси вращения.
3.2 Угловая скорость (средняя и мгновенная)
Средняя угловая скорость – это физическая величина, численно равная отношению углового пути к промежутку времени:
 ,
,  .
.
Мгновенная угловая скорость – это физическая величина, численно равная изменения пределу отношения углового пути к промежутку времени при стремлении данного промежутка к нулю, или является первой производной углового пути по времени:
 ,
,  .
.
3.3 Угловое ускорение (среднее и мгновенное)
Среднее угловое ускорение – это физическая величина, численно равная отношению изменения угловой скорости к промежутку времени, за который это изменение произошло:
 ,
,  .
.
Мгновенное угловое ускорение – это физическая величина, численно равная пределу отношения изменения угловой скорости к промежутку времени при стремлении данного промежутка к нулю, или является первой производной угловой скорости по времени, или второй производной углового пути по времени:
 ,
,  .
.
При ускоренном движении угловое ускорение совпадает по направлению с угловой скоростью. При замедленном вращении угловое ускорение направлено в противоположную относительно угловой скорости сторону.

3.4 Период, частота
Период – время одного полного оборота материальной точки.
 ,
, 
Частота – число оборотов материальной точки в единицу времени.
 ,
, 
4. Кинематические уравнения основных видов движения по окружности
Кинематические уравнения равномерного движения по окружности
При равномерном движении материальной точки по окружности кинематические уравнения в угловых переменных будут иметь вид:
 ,
,  ,
,  .
.
Кинематические уравнения равноускоренного движения по окружности
При движении материальной точки по окружности с постоянным угловым ускорением кинематические уравнения будут иметь вид, аналогичный прямолинейному равноускоренному движению (процедура получения уравнений одинаковая):
 ,
,  ,
,  .
.
5. Связь между линейными и угловыми величинами
Очевидно, что угловые переменные, введенные для вращения, и линейные переменные должны быть связаны друг с другом, так как с помощью тех и других можно описать одно и то же движение. Найдем эту связь.
По определению единицы измерения угла – радиана, дуга S окружности связана с радиусом окружности R соотношением  или для приращений
или для приращений  .
.
 По определению величина скорости (модуль вектора скорости ) равна
По определению величина скорости (модуль вектора скорости ) равна  .
.
При  длина хорды
длина хорды  стремится к длине дуги
стремится к длине дуги  , то есть
, то есть  , или
, или  . Тогда
. Тогда  .
.
О кончательно получаем
кончательно получаем  , то есть связь между скоростями имеет такой же вид, как связь между S и : .
, то есть связь между скоростями имеет такой же вид, как связь между S и : .
В векторном виде, с учетом направлений векторов, можем записать:  , где
, где  — радиус-вектор относительно центра вращения, его величина равна радиусу окружности,
— радиус-вектор относительно центра вращения, его величина равна радиусу окружности,  .
.
Теперь найдем связь между ускорениями. По определению  , а поскольку
, а поскольку
, то  .
.
Первое слагаемое  направлено по скорости, если
направлено по скорости, если  , и против, если
, и против, если  , то есть всегда параллельно скорости. Естественно, эту часть ускорения называют тангенциальной составляющей ускорения (тангенциальным ускорением):
, то есть всегда параллельно скорости. Естественно, эту часть ускорения называют тангенциальной составляющей ускорения (тангенциальным ускорением):
 .
.

Второе слагаемое  направлено по радиусу к центру окружности, то есть перпендикулярно скорости. Эту часть ускорения называют нормальной составляющей ускорения (нормальным ускорением):
направлено по радиусу к центру окружности, то есть перпендикулярно скорости. Эту часть ускорения называют нормальной составляющей ускорения (нормальным ускорением):
Кинематика. Равномерное движение.
Если тело за любые равные промежутки времени проходит равные пути, его движение называется равномерным.
Равномерное движение встречается довольно редко. Например, почти равномерно движется Земля вокруг Солнца, проходя за год один оборот.
При равномерноем движении скорость не изменяется:

Равномерное движение происходит как по прямолинейной, так и по криволинейной траектории.
Равномерное движение тела описывается уравнением:
где s – путь, пройденный телом от некоторой точки, принятой за начало отсчета, t – время тела в пути, s0 – значение s в начальный момент времени t = 0.
Прямолинейным равномерным движением называют движение, при котором тело за любые равные промежутки времени совершает одинаковые перемещения. Скорость прямолинейного равномерного движения – величина постоянная. Определяется как отношение перемещения точки к промежутку времени, в течение которого это перемещение произошло:

Модуль этой скорости – это перемещение тела, совершаемое за единицу времени.
Скоростью равномерного прямолинейного движении называют величину, равную отношению перемещения тела за любой промежуток времени к значению этого промежутка:

Перемещение при равномерном прямолинейном движении (по оси Х) можно рассчитать по формуле:
где υx – проекция скорости на ось Х, откуда закон равномерного прямолинейного движения будет иметь вид:
http://infourok.ru/metodicheskaya-razrabotka-na-temu-kinematika-755244.html
http://www.calc.ru/Kinematika-Ravnomernoye-Dvizheniye.html