Решение дифференциальных уравнений в физике
Примеры решения задач по механике, требующих интегрирования дифференциальных уравнений
(Задачи взяты из задачника: И.В. Мещерский «Сборник задач по теоретической механике», М.: Наука, 1981г., 460с.)
Задача №1. Пример задачи, приводящей к интегрированию дифференциальных уравнений методом разделения переменных.
При движении тела в неоднородной среде сила сопротивления изменяется по закону  Н, где v – скорость тела в м/с, а s – пройденный путь в метрах. Определить пройденный путь как функцию времени, если начальная скорость v 0=5 м/с.
Н, где v – скорость тела в м/с, а s – пройденный путь в метрах. Определить пройденный путь как функцию времени, если начальная скорость v 0=5 м/с.
Будем считать, что движение происходит вдоль оси 0Х, и что при t =0 тело находилось в начале координат, тогда проекция на ось 0Х силы, действующей на тело, может быть записана в виде
 .
.
С учётом этого выражения, имеем следующее уравнение движения (считая массу тела m =1 кг)
 , (1)
, (1)
которое дополняется начальными условиями
 ,
,  (2)
(2)
Решение уравнения второго порядка (1) можно свести к двум последовательным интегрированиям дифференциальных уравнений первого порядка. Чтобы получить первое уравнение, перепишем (1) в виде:
 , (3)
, (3)
и домножим на dt левую и правую части (3), учитывая при этом, что dx = vxdt , получим:
 , или
, или  (4)
(4)
Это уравнение с разделяющимися переменными (вида (1.5) из Раздела №1 Части I ). Очевидно, что оно, дополняется начальным условием, следующим из (2):
 (5)
(5)
Разделив переменные в (4), в соответствие с формулой (1.7):
 ,
,
вычисляя данные интегралы, получим частный интеграл уравнения (4) (в форме (В.4) из Введения к Части I ):
 (6)
(6)
Выразив отсюда vx , будем иметь частное решение уравнения (4) (в форме (В.6) из Введения к Части I ):
 (7)
(7)
Заменяя теперь в (7)
 ,
,
мы снова получаем уравнение с разделяющимися переменными (вида (1.1) из Раздела №1 Части I )
 (8)
(8)
Разделяя в (8) переменные, с учётом начального условия (2), ищем частный интеграл этого уравнения (в виде (1.4) из Раздела №1 Части I ):
 (9)
(9)
Вычисляя интегралы в (9), получим:
 (10)
(10)
— частный интеграл уравнения (8) в форме (В.4) из Введения к Части I. Выражая отсюда x , получим частное решение уравнения (8):
 , (11)
, (11)
которое одновременно является и частным решением уравнения движения (1), удовлетворяющим начальным условиям (2), то есть, представляет собой закон движения тела (координата x , (или в данном случае путь), как функция времени). Таким образом, решение исходного уравнения движения второго порядка (1) в процессе решения задачи было сведено к интегрированию двух уравнений первого порядка с разделяющимися переменными (4) и (8).
Задача №2. Пример задачи, приводящей к интегрированию линейного обыкновенного дифференциального уравнения первого порядка.
 Тело К, размерами которого можно пренебречь, установлено в верхней точке А шероховатой поверхности неподвижного полуцилиндра радиуса R . Какую начальную горизонтальную скорость
Тело К, размерами которого можно пренебречь, установлено в верхней точке А шероховатой поверхности неподвижного полуцилиндра радиуса R . Какую начальную горизонтальную скорость  , направленную по касательной к цилиндру, нужно сообщить телу К, чтобы оно начав движение, остановилось на поверхности цилиндра, если коэффициенты трения скольжения при движении и покое одинаковы и равны
, направленную по касательной к цилиндру, нужно сообщить телу К, чтобы оно начав движение, остановилось на поверхности цилиндра, если коэффициенты трения скольжения при движении и покое одинаковы и равны  .
.
 Расставляем силы, действующие на тело, и записываем второй закон Ньютона:
Расставляем силы, действующие на тело, и записываем второй закон Ньютона:

Спроектируем данное равенство на направление движения и перпендикулярное ему. Эти направления указаны на рисунке векторами  и
и  . Таким образом, для описания движения мы используем естественный способ. В результате получим:
. Таким образом, для описания движения мы используем естественный способ. В результате получим:
 (1)
(1)
Здесь учтено, что центростремительное ускорение
 ,
,
 .
.
Сделаем в первом уравнении в (1) замену переменной — перейдем от дифференцирования по времени к дифференцированию по углу  :
:
 (т.к.
(т.к.  )
)
С учетом этой замены перепишем (1):
 (2)
(2)
Домножая второе уравнение на  , и вычитая из первого, получим:
, и вычитая из первого, получим:
 (3)
(3)
Это уравнение типа (2.1) (из Раздела №2 Части I ), в котором независимой переменной вместо t является  ; неизвестной функцией вместо
; неизвестной функцией вместо  ;
;
 ;
;  .
.
Уравнение (3) дополняется начальным условием:
 (4)
(4)
С учетом указанных обозначений, используя формулу (2.9) (из Раздела №2 Части I ), решение уравнения (3) можно записать в виде:
 (5)
(5)
Вычисляя с помощью интегрирования по частям интервалы в (5) , окончательно получим:
 (6)
(6)
По условиям задачи тело должно остановиться на поверхности; т.е. при каком-то угле 
 .
.
Подставляя вместо  в (6) выразим оттуда
в (6) выразим оттуда  :
:
 (7)
(7)
Значение угла  можно выразить через
можно выразить через  , поскольку
, поскольку  ;
;
то из уравнений (2) получим:
 (8)
(8)
Отсюда:  ;
;
 (9)
(9)
 ;
; 
из (7) будем иметь:
 (10)
(10)
Следовательно, чтобы тело остановилось на шероховатой поверхности цилиндра, нужно, чтобы его начальная скорость 
 не превосходила значение, определенного в (10).
не превосходила значение, определенного в (10).
Задача №3. Пример задачи, приводящей к решению линейного однородного дифференциального уравнения второго порядка с постоянными коэффициентами.
 Тело массы 5 кг подвешено к концу пружины жёсткости 20 Н/м и помещено в вязкую среду. Период его колебаний в этом случае равен 10 с. Найти постоянную демпфирования, логарифмический декремент колебаний и период свободных колебаний.
Тело массы 5 кг подвешено к концу пружины жёсткости 20 Н/м и помещено в вязкую среду. Период его колебаний в этом случае равен 10 с. Найти постоянную демпфирования, логарифмический декремент колебаний и период свободных колебаний.
Выберем начало координат в положении статического равновесия тела и расставим силы, действующие на тело в процессе колебаний (считаем, что тело в данный момент времени движется вверх). Если АВ обозначает длину нерастянутой пружины, то отрезок ОВ представляет статическое удлинение пружины под действием силы mg . По закону Гука mg = k × ОВ, где k — коэффициент жёсткости пружины. Записываем второй закон Ньютона:
 .
.
Проектируем это равенство на ось ОХ, учитывая, что
 ,
,  .
.
В результате получим уравнение колебаний
 , или
, или  (1)
(1)
где  ,
,  .
.
Уравнение (1) представляет собой однородное обыкновенное дифференциальное уравнение второго порядка с постоянными коэффициентами (уравнение (1.1) Части II ). Для его решения используем схему, описанную в Разделе №1 Части II .
Составляем характеристическое уравнение:
 . (2)
. (2)
Вычисляем дискриминант уравнения (2):
 . (3)
. (3)
Поскольку в данном случае, в соответствие с условиями задачи движение тела носит колебательный (периодический) характер, то его координата должна изменяться со временем по гармоническому закону, то есть по закону косинуса или синуса. Для того же, чтобы решение уравнения (1) выражалось через данные функции, мы должны считать, что D  (4)
(4)
где величины  и
и  определяются следующим образом:
определяются следующим образом:
 ,
,  (5)
(5)
В случае отсутствия затухания (когда n =0),  , и тело совершает свободные колебания с периодом
, и тело совершает свободные колебания с периодом  с.
с.
Если же n ¹ 0, то период колебаний, с учётом (5),:
 .
.
Выражаем отсюда  , и определяем постоянную демпфирования a (коэффициент пропорциональности в формуле для силы сопротивления):
, и определяем постоянную демпфирования a (коэффициент пропорциональности в формуле для силы сопротивления):

Подставляя данные задачи, получим a =19  .
.
В соответствие со своим определением, логарифмический декремент затухания есть натуральный логарифм отношения двух последовательных амплитуд, (то есть взятых через половину периода колебания  ):
):  . Вычисляя n и подставляя значение Т, получим
. Вычисляя n и подставляя значение Т, получим  =9,5.
=9,5.
Задача №4. Пример задачи, приводящей к решению линейного неоднородного дифференциального уравнения второго порядка с постоянными коэффициентами.
 Для уменьшения действия на тело массы m возмущающей силы
Для уменьшения действия на тело массы m возмущающей силы  устанавливают пружинный амортизатор с жидкостным демпфером. Коэффициент жёсткости пружины k . Считая, что сила сопротивления пропорциональна первой степени скорости (
устанавливают пружинный амортизатор с жидкостным демпфером. Коэффициент жёсткости пружины k . Считая, что сила сопротивления пропорциональна первой степени скорости (  ), найти максимальное динамическое давление всей системы на фундамент при установившихся колебаниях.
), найти максимальное динамическое давление всей системы на фундамент при установившихся колебаниях.
Направим ось 0 X вдоль направления движения, выбрав начало координат в положении статического равновесия тела. При этом считаем, что сила тяжести скомпенсирована силой статического сжатия пружины амортизатора. Записываем второй закон Ньютона:
 .
.
Проектируем это равенство на ось ОХ, учитывая, что
 ,
,  ,
,  .
.
В результате получим уравнение колебаний
 , или
, или  , (1)
, (1)
где обозначено  ,
,  .
.
При колебаниях на фундамент действует сила, складывающаяся из силы деформации пружины и силы сопротивления, равная в соответствие с третьим законом Ньютона,
 . (2)
. (2)
Следовательно, для вычисления этой силы нужно знать уравнение движения тела  , для чего необходимо решить уравнение (1). Поскольку в задаче рассматриваются уже установившиеся колебания, то есть рассматривается движение тела, установившееся по истечению достаточно большого промежутка времени от момента его начала. При этом тело будет совершать колебания с частотой вынуждающей силы. Поэтому мы должны найти частное решение уравнения (1), соответствующее этим вынужденным колебаниям. Для этого используем метод подбора по правой части. Представим, в соответствие с формулой (2.5) (из Раздела №2 Части II ) решение уравнения (1) в виде
, для чего необходимо решить уравнение (1). Поскольку в задаче рассматриваются уже установившиеся колебания, то есть рассматривается движение тела, установившееся по истечению достаточно большого промежутка времени от момента его начала. При этом тело будет совершать колебания с частотой вынуждающей силы. Поэтому мы должны найти частное решение уравнения (1), соответствующее этим вынужденным колебаниям. Для этого используем метод подбора по правой части. Представим, в соответствие с формулой (2.5) (из Раздела №2 Части II ) решение уравнения (1) в виде
 (3)
(3)
Обозначим для краткости записи через  и подставим (3) в (1):
и подставим (3) в (1):

Приравнивая коэффициенты при  и
и  , получим следующую систему уравнений:
, получим следующую систему уравнений:

Решая данную систему, находим
 ,
,  (4)
(4)
Подставим (4) в (3):
 (5)
(5)
Данную формулу, обозначая

 , (6)
, (6)
можно переписать в виде:
 (7)
(7)
Подставим теперь (7) в (2):
 (8)
(8)

 , (9)
, (9)
формулу (8) можно переписать в виде
 (10)
(10)
Отсюда следует, что максимальное динамическое давление всей системы на фундамент равно
 . (11)
. (11)
Классическая механика: о диффурах «на пальцах»
Введение
В этой статье я продолжаю тему цифровой обработки сигналов. В ней я постараюсь простым языком рассказать о концепции игровой механики (физики) с использованием подхода на основе дифференциальных уравнений. В будущем я собираюсь оценить действительно ли реализация такого подхода приведет к резкому увеличению вычислительной нагрузки. В рамках этой статьи не получится — слишком большой объем. В этой я собираюсь описать назначение коэффициентов, входящих в математическую модель динамического объекта, описать их физический смысл, т.е. их влияние на поведение динамического объекта.
Начнем пожалуй…
Физический смысл
В своей статье про Фильтр Калмана я описал что такое уравнения вида «вход-выход», передаточная функция и операторная форма записи дифференциальных уравнений (см. раздел «Основные понятия» в [2]). Примером части математической модели динамического объекта в операторной форме записи может служить следующее уравнение:
(1) 
Это распространенная упрощенная модель динамических систем. Опережая напишу, что модель тела в движке «Farseer» использует урезанный аналог представленной выше модели (динамического звена второго порядка). Ниже представлено описание принятых в ней обозначений.
- а0, а1, а2 — коэффициенты инерции, демпфирования и жесткости, соответственно.
- b0, b1 — коэффициенты входного воздействия.
- s — оператор Лапласса (d/dt).
- α(s), β(s) — выходная и входная переменные, как функции оператора Лапласса.
Представленное уравнение описывает динамическую систему типа «один вход — один выход» (SISO). Ее можно использовать для описания динамики объекта по одной из его степеней свободы. Как Вам, возможно, известно, у свободного тела есть шесть степеней свободы — три поступательные (линейное движение вдоль трех осей системы координат (СК) ) и три вращательные (повороты вокруг осей СК). Таким образом, полная модель физического тела будет описываться шестью такими уравнениями (или четырьмя для 2D случая). Вы сразу можете сказать, что уже это свидетельствует о слишком высокой сложности такого подхода. Но на самом деле в Farseer, к примеру, класс тела (Body) содержит и линейные координаты тела (по сути это пара α(s) по OX и OY), и линейные скорости (пара s*α(s) по OX и OY) и параметры ориентации и угловой скорости. Эти параметры обсчитываются раздельно для каждой из осей, т.е. количество уравнений такое же — два уравнения по оси OX (линейное и угловое движение) и два для оси OY. Разница лишь в форме уравнений.
Алгоритм в движке Farseer — приближенный и упрощенный, но позволяет работать с варьируемыми квантами времени. В функцию обсчета параметров движения (Island.Solve(ref TimeStep step, ref Vector2 gravity)) передается время, прошедшее после последнего обсчета параметров. Это позволяет при недостаточной производительности компьютера держать скорость течения игрового времени примерно постоянным в ущерб плавности и реалистичности движения игровых объектов.
При построении дискретной модели на основе диференциальных уравнений мы четко завязываемся на фиксированный квант времени. Уравнения интегрируются для изначально заданной частоты дискретезации, и если с момента последнего обсчета по какой-то причине прошло времени больше, чем заданный квант (в англоязычной литературе его называют «time sample»), то мы либо должны произвести обсчет несколько раз, либо получим замедление движения объекта. Последнее я как раз и наблюдал в игре «Command Cortex» на слабой машине. Движения акторов были плавными но медленными (акторы, управляемые человеком, получают преимущество). Таким образом, нельзя говорить об исключительном преимуществе одного из этих подходов.
Теперь о том, за что отвечают коэффициенты представленного выше уравнения. Это уравнение описывает движение физического тела относительно положения равновесия при α(s) = 0. Это еще одна из причин кажущегося неудобства применения такой модели в игровой механике. При отсутствии приложенных внешних сил данная модель рано или поздно возвратит (при условии устойчивости модели) тело в положение равновесия. Представьте игровой мир, наполненный шариками, которые все время стремятся в начало координат (например, в левый верхний угол экрана). К такому поведению приводит наличие коэффициента жесткости (см. а2 выше). Представьте, что тело соединено с началом координат пружиной. Пока на тело действуют силы, пружина растянута, но стоит убрать внешнее воздействие и тело устремится к нулю. Тела в движке Farseer таким поведением не обладают. Если мы зададим коэффициент a2 равным нулю, то и в данном случае тела не будут стремиться к началу координат (см. выше я писал, что модели в Farseer по сути урезанные варианты этой модели). Ну и зачем этот коэффициент тогда нужен, спросите Вы. Если раскрыть скобки в левой части уравнения (1) и вместо слагаемого
a2*α(s)
напишем
a2*(α(s) — α0)
то через α0 мы получим возможность задать положение, к которому игровой объект будет стремиться. Величина коэффициента а2 отвечает за то, насколько быстро тело переместится в заданное положение равновесия (чем больше значение, тем выше жесткость пружины). Как такое реализовывается в Farseer я пока не выяснил, но думаю придется создать дополнительный источник воздействия.
Теперь коэффициент a1. Это коэффициент демпфирования. Чем больше значение этого коэффициента, тем быстрее гасится скорость (линейная или угловая). Аналогия из жизни — вязкие жидкости, такие как масло, мед, эпоксидная смола. Эти жидкости очень вязкие (имеют большое значение коэффициента демпфирования). Чем выше скорость движения тела в них, тем выше сопротивление этому движения. Если медленно двигать в них ложку, например, то преодолеть сопротивление большого труда не составит, а вот если ударить с размаху, то удар будет жестким.
Величина коэффициента а0 характеризует инерцию объекта. При описании линейного движения в качестве коэффициента а0 используется масса. Чем выше его значение, тем медленнее тело набирает скорость при приложении к нему внешних сил.
Теперь о коэффициентах в правой части уравнения (1). Тут нужно заметить, что данная модель расширенная на случай, когда входное воздействие определяется не только самим значением внешней силы, но и ее изменением. Для описания динамики игровых объектов это, возможно, будет излишним. Однако в промышленных системах управление встречаются и такие модели. Каков же их физический смысл? Коэффициент b1 это по сути коэффициент передачи внешней силы вовнутрь объекта. Обычно он равен еденице, т.е. сила передается как есть.
Коэффициент b0 интересен. Он играет роль форсирующего коэффициента. Представьте очень инерционный объект, к которому прикладывают силу, плавно нарастающую со временем. Если скорость нарастания и конечная величина силы будут малы, то объект очень медленно набирать скорость. Но если силу сделать большой, то после достижения внешней силой заданного значения объект не остановится в каком-то положении, а будет колебаться под действием инерции. Форсирование — это воздействие, пропорциональное скорости нарастания внешней силы. Если мы выберем его большим, то даже при малой скорости нарастания внешней силы наш объект будет достаточно быстро набирать скорость, а когда внешняя сила достигнет заданного значения, форсирование отключится. Вот такой вот хитрый этот «b0».
Динамика в картинках
Чтобы наглядно показать влияние коэффициентов дифф. уравнения на поведение динамического объекта решил построить графики переходного процесса при ступенчатом (step response) и импульсном (impulse response) входных воздействиях. Всего представлено 6 групп графиков (по одной группе для каждого коэффициента). Графики построены в пакете Octave (v. 3.4) с установленным пакетом «Signal Processing».
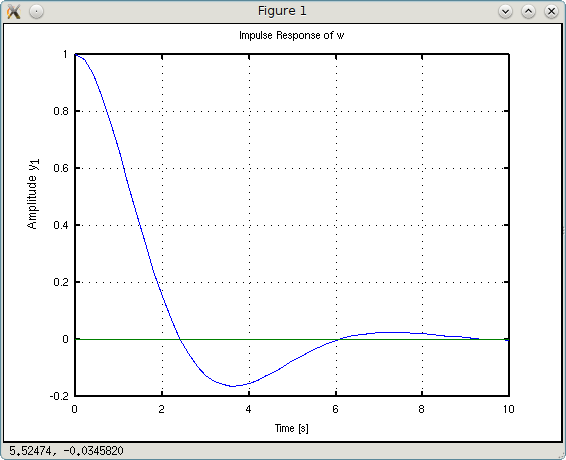
Итак, в качестве исходной возьмем модель вида:
=========================================
>>> w = tf([1 1],[1 1 1])
Transfer function «w» from input «u1» to output…
y1: (s + 1)/(s^2 + s + 1)
Continuous-time model.
========================================= 
Код «w = tf([1 1],[1 1 1])» в символьном виде имеет вид:
>>> w = tf([b0 b1],[a0 a1 a2])
На скриншотах внизу-справа — примерное время стабилизации (коридором стабильности считаем ± 5% от заданной величины).
Попробуем поиграться с коэффициентом жесткости a2.
>>> w1 = 0.1*tf([1 1],[1 1 0.1])
y1: (s + 1)/(s^2 + s + 0.1)
>>> w2 = 10*tf([1 1],[1 1 10])
y1: (s + 1)/(s^2 + s + 10)
Примечание: пришлось подшаманить с коэффициентами усиления, чтобы результирующий коэффициент усиления был равен единице. 
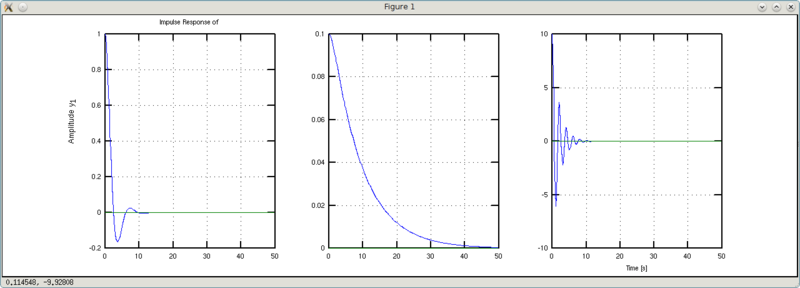
Что видно на графиках? Слева-направо представлены графики для w, w1 и w2, соответственно. Графики w1 более плавные и медленнее достигают установившегося значения. Графики w2 имеют более колебательный характер, но быстрее достигают установившегося значения. Вывод: жестче пружина — больше колебаний, но короче переходный процесс.
Попробуем поиграться с демпфированием (а1).
>>> w1 = tf([1 1],[1 0.25 1])
y1: (s + 1)/(s^2 + 0.25s + 1)
>>> w2 = tf([1 1],[1 2 1])
y1: (s + 1)/(s^2 + 2s + 1) 

Сразу вывод: больше вязкость — быстрее затухают колебания.
Попробуем поиграться с инерцией (а0).
>>> w1 = tf([1 1],[0.1 1 1])
y1: (s + 1)/(0.1s^2 + s + 1)
>>> w2 = tf([1 1],[2 1 1])
y1: (s + 1)/(2s^2 + s + 1) 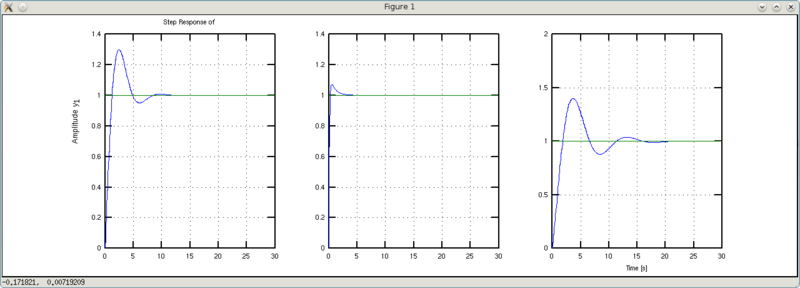
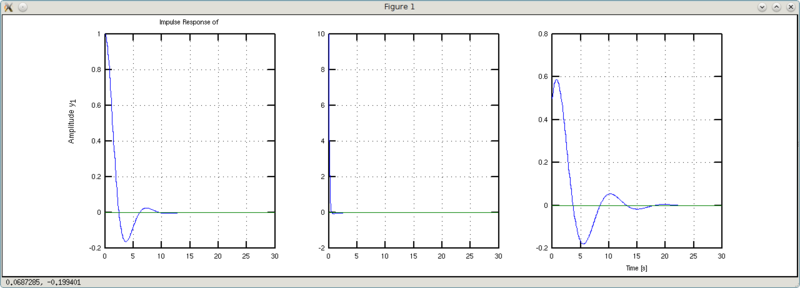
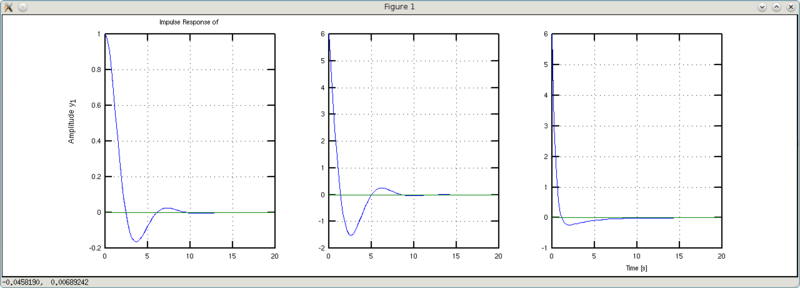
Вывод: меньше масса чугуняки — меньше болтанки и короче переходный процесс.
Перейдем к правой части и поиграемся с b1.
>>> w1 = 10*tf([1 0.1],[1 1 1])
y1: (10 s + 1)/(s^2 + s + 1)
>>> w2 = 0.25*tf([1 4],[1 1 1])
y1: (0.25 s + 1)/(s^2 + s + 1) 
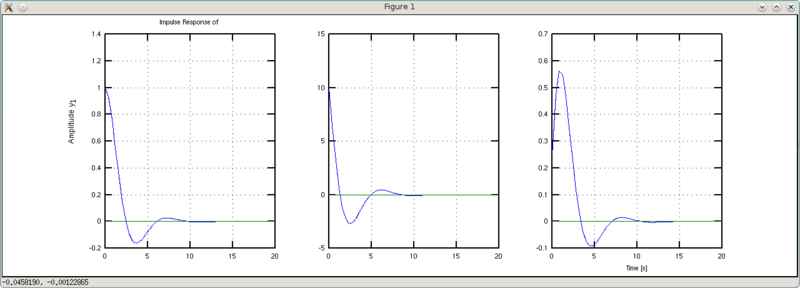
Вроде бы разница еле заметна, если смотреть на графики Step Response. Но на графиках Impulse Response хорошо виден эффект этого коэффициента. Если он равен единице, то график импульсного переходного процесса начинается с единицы (на самом деле он выходит из нуля, но не суть важно — второе значение в графике еденица). График w1 «начинается» со значения 10 (обратная величина от 0.1), а график w2 — начинается со значения 0.25 (обратное к 4). Таким образом, коэффициент b1 можно «обозвать» коэффициентом эффективности управления (входного воздействия).
И напоследок вкусненькое — игры с коэффициентом b0. Это хитрый коэффициент, потому и сравнение будет не таким как было выше. Чтобы показать его эффект придется варьровать несколько коэффициентов.
>>> w1 = tf([6 1],[1 1 1])
y1: (6 s + 1)/(s^2 + s + 1)
>>> w2 = tf([6 1],[1 3 1])
y1: (6 s + 1)/(s^2 + 3 s + 1) 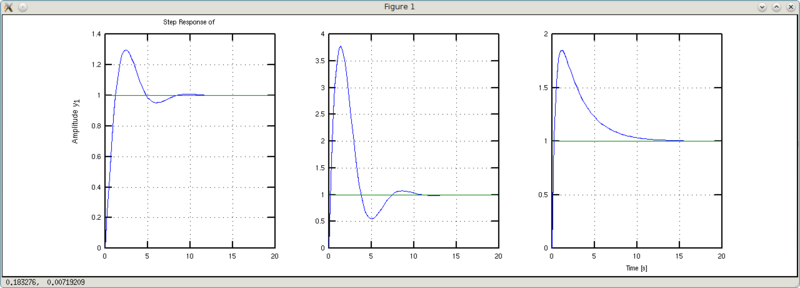
Чем отличаются друг от друга w1 и w2? У w2 в три раза больше коэффициент демпфирования. В результате получаем интересные выводы. Графики w1 и w2 раньше пересекают уровень установившегося значения чем дефолтный график. Однако график w1 сохраняет форму дефолтного с его колебательностью, а график w2 за счет увеличенного демпфирования более сглаженный. Таким образом, играясь с форсированием и демпфированием мы можем заставить даже чугунный утюг порхать по рингу как бабочка без колебаний туда-сюда.
На правах PS
В данной статье я рассматривал лишь положительные значения коэффициентов. Их положительность — необходимое условие устойчивости мат. модели. Однако можно попробовать поиграться и с отрицательными значениями. Неустойчивой системой также можно управлять. Вспомните о самолетах пятого поколения (например, наш Беркут). Обратная стреловидность крыла — это неустойчивый планер, но зато высокая маневренность. Автоматика способна скорректировать эту неустойчивость и при этом, когда нужно, закладывать крутые виражи.
Если получится, состряпаю игрушку, с которой можно будет наглядно увидеть все эти эффекты.
Решение дифференциальных уравнений в физике
А. А. Гусак. Высшая математика. Том 2.
Глава 27. Простейшие дифференциальные уравнения математической физики
В этой главе рассматриваются некоторые уравнения математической физики, т.е. уравнения с частными производными второго порядка, к которым приводят следующие задачи: задача о колебаниях струны, задача о распространении тепла и др.
27.1. Вывод уравнения колебаний струны
Рассмотрим туго натянутую струну, закрепленную на концах. Выведем струну из положения равновесия (оттянув ее или ударив по ней), струна начнет колебаться.
Предположим, что любая точка струны колеблется по прямой, перпендикулярной к исходному положению струны, и струна все время находится в одной и той же плоскости.
Выберем в этой плоскости декартову прямоугольную систему координат Охu. В качестве оси Ох возьмем прямую, на которой находилась струна в положении равновесия, за ось Оu примем прямую, проходящую через левый конец струны и перпендикулярно к оси Ох (рис. 27.1).
Отклонение струны от положения равновесия обозначим через u; очевидно, u зависит от абсциссы х точки струны и времени t, т.е. u = u(х, t).
При фиксированном t графиком функции u = u(х, t) в плоскости Охu является форма струны в данный момент времени t. Угловой коэффициент касательной к графику в точке с абсциссой х равен частной производной по х от функции u(х, t) т.е.

где α = α (x, t) – угол наклона касательной.
Чтобы составить представление о колебаниях струны, необходимо начертить ряд графиков функции u = u(х, t) при различных значениях t.
При фиксированном значении х функция u = u(х, t) определяет закон движения точки с абсциссой х. Эта точка движется по прямой, параллельной оси Оu. Скорость и ускорение указанного движения выражаются соответственно формулами

Будем изучать малые колебания струны, т.е. такие, при которых угол α = α (x, t) (угол наклона касательной к графику функции u = u(х, t) при каждом фиксированном значении t) настолько мал, что его квадратом можно пренебречь, т.е. приближенно считать

то отсюда следует, что
sin α = α, cos α = 1.
tg α – sin α = tg α(1 – cos α) = tg α · 0 = 0 ,
Принимая во внимание (27.3) – (27.5), заключаем, что
tg² α = 0 , или 
Следовательно, длина дуги струны, ограниченной точками M1(x1, u1), M2(x2, u2) выразится формулой

Соотношение (27.7) означает, что длина любого участка струны остается постоянной.
Будем предполагать струну абсолютно гибкой, что означает следующее: если удалить участки ОМ1, M2L (см. рис. 27.1), то их действия на участок М1М2 заменяются соответственно действием сил натяжения T1 и Т2, направленных по касательным к графику функции u = u(х, t) в точках М1 и М2 (рис. 27.2). Поскольку по предположению точки струны движутся по прямым, параллельным оси Оu, то сумма проекций сил T1, Т2 на ось Ох равна нулю. Проектируя эти силы на ось Ох, получаем T2сos α2 – T1cos α1 = 0, где T1, Т2 – величины сил T1, Т2.
На основании второго из равенств (27.4) заключаем, что T1 = T2 т.е. величина силы натяжения остается постоянной. Обозначая ее через T, получаем
Проектируя силы T1, Т2 на ось Оu, находим
С учетом равенства (27.1) получаем
где х – абсцисса точки М1; х + Δх – абсцисса точки М2.
Применяя теорему Лагранжа о конечном приращении дифференцируемой функции, находим, что

поэтому проекция сил натяжения T1 и Т2 на ось Ох выразится формулой

Предположим, что на струну действуют также внешние силы, параллельные оси Оu, плотность распределения* которых равна g(x, t), тогда величина равнодействующей этих сил, приложенных к участку М1М2, приближенно равна g(x, t)Δx. Силами сопротивления внешней среды пренебрегаем.
* Под плотностью понимают предел средней плотности распределения сил на данном отрезке, когда длина отрезка стремится к нулю; средняя плотность – отношение величины равнодействующей сил к длине отрезка, на котором они приложены.
Будем считать струну однородной, обозначим через ρ ее линейную плотность, тогда масса участка М1М2 выразится так: ρ М1М2 = ρ Δх, m = ρ Δх
В соответствии со вторым законом Ньютона mw = F (произведение массы на ускорение равно действующей силе) получаем



Уравнение (27.10) называется уравнением колебаний струны, или одномерным волновым уравнением.
Если g(x, t) = 0 (внешние силы отсутствуют), то уравнение (27.10) принимает вид

Уравнение (27.12) называется уравнением свободных колебаний, уравнение (27.10) — уравнением вынужденных колебаний струны.
27.2. Начальные и краевые условия. Задача Коши
Чтобы из множества решений уравнения с частными производными второго порядка выбрать определенное решение, необходимо задать дополнительные условия.
Так, в случае уравнения (27.10) или (27.12) нужно указать отклонение и скорость движения в начальный момент времени t0 (будем полагать t0 = 0), т.е.

где f(x), F(x) – заданные функции, а также зафиксировать отклонения концов струны. Поскольку концы закреплены, то

где l – длина струны.
Условия (27.13) называются начальными условиями, а условия (27.14) – краевыми (или граничными) условиями.
Итак, задача о свободных колебаниях струны ставится следующим образом. Найти решение u = u(х, t) линейного однородного уравнения с частными производными второго порядка , удовлетворяющее начальным условиям u(х, 0) = f(x), u'(х,0) = F(x) и краевым условиям u(0, t) = 0, u(l, t) = 0.
Функции f(х) и F(x) определены на отрезке [0, l], из краевых условий следует, что f(0) = 0, f(l) = 0. Можно доказать, что при некоторых предположениях относительно функций f(x) и F(x) поставленная задача имеет единственное решение.
В случае, когда предполагается, что струна является неограниченной, граничные условия не налагаются.
Задача о свободных колебаниях неограниченной струны ставится так. Найти решение u = u(х, t) уравнения с частными производными второго порядка  , удовлетворяющее начальным условиям
, удовлетворяющее начальным условиям
где f(x) и F(x) – заданные функции, определенные на всей действительной оси. Эта задача называется задачей Коши.
27.3. Задача о свободных колебаниях бесконечной струны. Метод Д’Аламбера
Как уже отмечалось, задача о свободных колебаниях бесконечной струны, или задача Коши, состоит в следующем.
Найти решение u = u(х, t) линейного однородного уравнения

удовлетворяющее начальным условиям
где f(х), F(x) – заданные функции, определенные в бесконечном промежутке (-∞, +∞).
Уравнение (27.15) перепишем так:  и (положив t = у) сравним его с уравнением (26.9). Поскольку В² — АС = а² > 0, то уравнение является уравнением гиперболического типа.
и (положив t = у) сравним его с уравнением (26.9). Поскольку В² — АС = а² > 0, то уравнение является уравнением гиперболического типа.
Уравнение характеристик Ady² — 2Bdxdy + Cdx² = 0 принимает вид a²dt² — dx² = 0 или dx² — a²dta² = 0. Оно распадается на два уравнения dx – adt = 0, dx + adt = 0, откуда получаем х – at = С1, х + at – С1.
Введя новые переменные ξ и η по формулам
преобразуем уравнение (27.15) к каноническому виду.
Выражаем частные производные по переменным х, t через частные производные по ξ, η :

Подставляя в уравнение (27.15) выражения для частных производных второго порядка, получаем 
Проинтегрируем последнее уравнение. Положим  тогда
тогда 
Следовательно,  , или u = φ(ξ) + ψ(η) , где φ(ξ), ψ(η) – произвольные дважды дифференцируемые функции своих аргументов. Принимая во внимание (27.17), последнюю формулу можно записать так:
, или u = φ(ξ) + ψ(η) , где φ(ξ), ψ(η) – произвольные дважды дифференцируемые функции своих аргументов. Принимая во внимание (27.17), последнюю формулу можно записать так:
Формула (27.18) определяет общее решение уравнения (27.15).
Среди всех этих решений найдем то, которое удовлетворяет условиям (27.16), Для функции (27.18) и ее частной производной по t

условия (27.16) принимают вид
Второе равенство проинтегрируем по отрезку [0, х]. Обозначив переменную интегрирования через z получим

где С = φ (0) + ψ (0)


Это уравнение и первое из уравнений (27.19) позволяют определить функции φ (x) и ψ (x):

Подставляя в эти формулы вместо х соответственно х – at и х + at, получаем

В соответствии сформулой (27.18) находим


Формула (27.20) представляет решение Д’Аламбера рассматриваемой задачи Коши для уравнения колебаний неограниченной струны. Читателю предлагается непосредственной проверкой убедиться в том, что функция (27.20) удовлетворяет уравнению (27.15) и условиям (27.16).
А. А. Гусак. Высшая математика. Том 2. Стр. 247-253.
http://habr.com/ru/post/135794/
http://an-site.ru/kr/ko2.htm