Решение матричного дифференциального уравнения риккати
Решение матричного дифференциального уравнения риккати
Тема: «Синтез оптимального управления»
В традиционной постановке задача синтеза оптимального управления в пространстве состояний предусматривает определение вектора управляющих сигналов u0(t) на основании минимизации некоторого критерия качества и формулируется следующим образом.
Для объекта управления, который описывается векторными дифференциальным и ал-гебраическими уравнениями
необходимо найти закон управления u0(t), при котором достигается минимум квадратичного функционала качества
который подробно представлен в лекции 7.
Общая математическая постановка указанной задачи приводит к уравнению Беллма-на, которое имеет следующий вид:
Вывод уравнения Беллмана, характеристики входящих в него переменных и функций приведены в приложении 1.
Решение уравнения (9.3) для объекта управления, который описывается векторно-матричной моделью (9.1), позволяет определить закон оптимального управления в виде
где , P(t) — решение матричного дифференциального уравнения Рик-кати
c граничным условием .
Вывод уравнения Риккати приведен в приложении 2.
В соответствии с вышеизложенным алгоритм синтеза оптимального уравнения пред-ставляет собой следующую последовательность действий:
1) построение векторно-матричной модели ОУ (9.1);
2) выбор элементов весовых матриц F, Q(t), R(t) в (9.2), при которых переходные процессы в системе управления удовлетворяют заданным требованиям;
3) решение матричного дифференциального уравнения Риккати (9.5);
4) анализ динамических характеристик в оптимальной системе управления и оценка ее качества.
Основные трудности возникают здесь при решении матричного дифференциального уравнения Риккати. Интегрирование этого уравнения удобно выполнять в обратном времени . В этом случае задача сводится к задаче Коши с начальными условиями . Ввиду симметричности матрицы P(t) уравнение (9.5) равносильно системе n(n+1)/2 обыкно-венных нелинейных дифференциальных уравнений первого порядка с переменными во вре-мени коэффициентами.
Для стационарных систем, в которых A, B, Q, R — коэффициентные матрицы и , матричное дифференциальное уравнение Риккати вырождается в алгебраическое
решением которого является симметричная положительно определенная матрица Р.
Решение уравнения (9.28) для стационарных систем при и имеет предел
Поэтому матрицу Р можно вычислить как предельное значение решения уравнения (9.5) при достаточно большом Т.
По аналогии с (9.4) оптимальное управление определится из выражения
Пример 9.1. Для электромеханического объекта с упругой передачей механического движения от вала электродвигателя к валу рабочего механизма, численные значения пара-метров которого приведены в табл. 9.1., выполним синтез оптимального управления (9.4) и безынерционного регулятора состояния.
Таблица 9.1. Параметры электромеханического объекта
Результатом серии вычислительных экспериментов явились:
внутреннее содержание весовых матриц Q, и R
временные характеристики
полученные в результате решения уравнения Риккати (9.5) в обратном времени, которые приведены на рис. 9.1
Для постановки имитационных экспериментов используем приведенные в табл. 9.2 постоянные расчетные значения коэффициентов обратных связей, соответствующие t=0, и значения реализации.
Таблица 9.2. Значения коэффициентов обратных связей
Рис. 9.1. Динамические характеристики K0(t)
Сравнительные динамические характеристики (см. рис. 9.2), систем управления, в ко-торых параметры регулятора соответствуют значениям реализации коэффициентов обратных связей (табл. 9.2) и значениям регулятора состояния, синтезированного при использовании в качестве критерия качества биномиального распределения корней (), подтвер-ждают корректность алгоритмического и программного обеспечения синтеза оптимального управления.
Рис. 9.2. Сравнительные динамические характеристики систем управления с регулятором состояния
Контрольные вопросы к лекции № 9.
1. Укажите основные особенности численного решения матричного дифференциального уравнения Риккати?
2. При каких условиях матричное дифференциальное уравнение Риккати вырождается в алгебраическое?
3. Какие значения должны принимать коэффициенты обратных связей для «точной» реализации оптимального управления?
ОТВЕТЫ
Интегрирование уравнения Риккати, как правило, выполняется в обратном времени .
Для стационарных систем, в которых A, B, Q, R — коэффициентные матрицы и , матричное дифференциальное уравнение Риккати вырождается в алгебраическое
Значения коэффициентов обратных связей должны непрерывно изменяться во времени в соответствии с результатом решения уравнения Риккати .
Дифференциальное уравнение Риккати
Общее решение этого уравнения можно получить только в некоторых частных случаях.
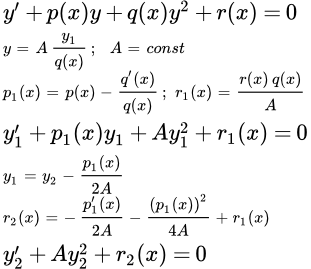
Решение дифференциального уравнения Риккати при известном частном решении
Рассмотрим дифференциальное уравнение Риккати: (1) . Пусть известно его частное решение :
Тогда подстановкой уравнение Риккати (1) приводится к уравнению Бернулли: ; ; ; ; . Это уравнение Бернулли с n = 2 .
При таких подстановках уравнение также является уравнением Риккати, но с другими функциями p, q, r.
Вид общего решения
Общее решение уравнения Риккати есть дробно-линейная функция от произвольной постоянной:
И наоборот если общее решение уравнения есть дробно-линейная функция от произвольной постоянной, то соответствующее уравнение есть уравнение Риккати.
Упрощение уравнения Риккати
Снова рассмотрим дифференциальное уравнение Риккати: (1) . Подстановкой , где А – постоянная, оно приводится к виду: (2) , где .
Далее, подстановкой
оно приводится к виду: (3) где .
Упрощенное уравнение Риккати
Упрощенное уравнение Риккати – это уравнение вида: (4) , где A, B – постоянные. Оно интегрируется при , где – целое.
Покажем это. Сделаем подстановку: ; . Подставляем в (4): . Умножаем на : (5) . Но . Подставляем в (5):
Или (6) где . Уравнение (6) интегрируется при . Для этого разделим его на и перепишем в следующем виде: ; ; . Это уравнение с разделяющимися переменными. Оно легко интегрируется.
При уравнение (6) можно преобразовать двумя путями.
Подстановкой , где , оно преобразуется к виду: .
Подстановкой , где , оно преобразуется к виду:
Таким образом, при , где n — целое число, ряд подстановок приводит к полному решению.
Использованная литература: Н.М. Гюнтер, Р.О. Кузьмин, Сборник задач по высшей математике, «Лань», 2003.
Автор: Олег Одинцов . Опубликовано: 14-08-2012
Решение матричного дифференциального уравнения риккати
Матричное уравнение Риккати. При известных A, R, Q (A 0, матрицы R и Q симметричны), рассматривается уравнение вида
Алгоритм решения связан с расчетом блочной матрицы собственных векторов S=[v; ω], отвечающей устойчивой части спектра [A R, -Q -A’], причем P=wv -1 .
Якопо Франческо — итальянский математик рубежа XVIII века. Учился в Падуе. С 1747 жил в Венеции. Известен также инженерной деятельностью, он руководил постройкой речных плотин. Основные труды относятся к интегральному исчислению и дифференциальным уравнениям. Автор исследований об интегрируемости в элементарных функциях одного типа дифференциального уравнения 1-го порядка, названного его именем. Отмеченное уравнение описывает стационарную точку решения. Соответствующая процедура включена в системный тулбокс.
Матричное уравнение Ляпунова. При известных A, Q (A 0, Q=Q’), ищется матрица P из уравнения
Это частный случай обращения к процедуре решения уравнения Риккати, при R=0.
К уравнению Ляпунова сводятся задачи нахождения грамианов динамических систем. Более общее матричное уравнение имеет вид
оно дает решение для кросс-грамиана, при B=A, R=0, Q=bc. Алгоритм связан с составлением блочной матрицы [A R, -Q -B], в остальном все также, как и в случаях, рассмотренных выше call P=riccati4(A R Q B).



 , P(t) — решение матричного дифференциального уравнения Рик-кати
, P(t) — решение матричного дифференциального уравнения Рик-кати
 .
. . В этом случае задача сводится к задаче Коши с начальными условиями
. В этом случае задача сводится к задаче Коши с начальными условиями  . Ввиду симметричности матрицы P(t) уравнение (9.5) равносильно системе n(n+1)/2 обыкно-венных нелинейных дифференциальных уравнений первого порядка с переменными во вре-мени коэффициентами.
. Ввиду симметричности матрицы P(t) уравнение (9.5) равносильно системе n(n+1)/2 обыкно-венных нелинейных дифференциальных уравнений первого порядка с переменными во вре-мени коэффициентами. , матричное дифференциальное уравнение Риккати вырождается в алгебраическое
, матричное дифференциальное уравнение Риккати вырождается в алгебраическое
 и
и 





 ), подтвер-ждают корректность алгоритмического и программного обеспечения синтеза оптимального управления.
), подтвер-ждают корректность алгоритмического и программного обеспечения синтеза оптимального управления.