Численное решение математических моделей объектов заданных системами дифференциальных уравнений
Введение:
При математическом моделировании ряда технических устройств используются системы дифференциальных нелинейных уравнений. Такие модели используются не только в технике, они находят применение в экономике, химии, биологии, медицине, управлении.
Исследование функционирования таких устройств требуют решения указанных систем уравнений. Поскольку основная часть таких уравнений являются нелинейными и нестационарными, часто невозможно получить их аналитическое решение.
Возникает необходимость использовать численные методы, наиболее известным из которых является метод Рунге — Кутты [1]. Что касается Python, то в публикациях по численным методам, например [2,3], данных по применение Рунге — Кутты крайне мало, а по его модификации — методу Рунге-Кутта-Фельберга вообще нет.
В настоящее время, благодаря простому интерфейсу, наибольшее распространение в Python имеет функцию odeint из модуля scipy.integrate. Вторая функция ode из этого модуля реализует несколько методов, в том числе и упомянутый пятиранговый метод Рунге-Кутта-Фельберга, но, вследствие универсальности, имеет ограниченное быстродействие.
Целью настоящей публикации является сравнительный анализ перечисленных средств численного решения систем дифференциальных уравнений с модифицированным автором под Python методом Рунге-Кутта-Фельберга. В публикации так же приведены решения по краевым задачам для систем дифференциальных уравнений (СДУ).
Краткие теоретические и фактические данные по рассматриваемым методам и программным средствам для численного решения СДУ
Для одного дифференциального уравнения n – го порядка, задача Коши состоит в нахождении функции, удовлетворяющей равенству:

и начальным условиям

Перед решением эта задача должна быть переписана в виде следующей СДУ
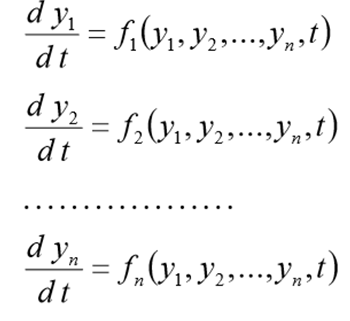 (1)
(1)
с начальными условиями

Модуль имеет две функции ode() и odeint(), предназначенные для решения систем обыкновенных дифференциальных уравнений (ОДУ) первого порядка с начальными условиями в одной точке (задача Коши). Функция ode() более универсальная, а функция odeint() (ODE integrator) имеет более простой интерфейс и хорошо решает большинство задач.
Функция odeint() имеет три обязательных аргумента и много опций. Она имеет следующий формат odeint(func, y0, t[,args=(), . ]) Аргумент func – это имя Python функции двух переменных, первой из которых является список y=[y1,y2. yn], а второй – имя независимой переменной.
Функция func должна возвращать список из n значений функций  при заданном значении независимого аргумента t. Фактически функция func(y,t) реализует вычисление правых частей системы (1).
при заданном значении независимого аргумента t. Фактически функция func(y,t) реализует вычисление правых частей системы (1).
Второй аргумент y0 функции odeint() является массивом (или списком) начальных значений  при t=t0.
при t=t0.
Третий аргумент является массивом моментов времени, в которые вы хотите получить решение задачи. При этом первый элемент этого массива рассматривается как t0.
Функция odeint() возвращает массив размера len(t) x len(y0). Функция odeint() имеет много опций, управляющих ее работой. Опции rtol (относительная погрешность) и atol (абсолютная погрешность) определяют погрешность вычислений ei для каждого значения yi по формуле

Они могут быть векторами или скалярами. По умолчанию

Вторая функция модуля scipy.integrate, которая предназначена для решения дифференциальных уравнений и систем, называется ode(). Она создает объект ОДУ (тип scipy.integrate._ode.ode). Имея ссылку на такой объект, для решения дифференциальных уравнений следует использовать его методы. Аналогично функции odeint(), функция ode(func) предполагает приведение задачи к системе дифференциальных уравнений вида (1) и использовании ее функции правых частей.
Отличие только в том, что функция правых частей func(t,y) первым аргументом принимает независимую переменную, а вторым – список значений искомых функций. Например, следующая последовательность инструкций создает объект ODE, представляющий задачу Коши.
При построении численных алгоритмов будем считать, что решение этой дифференциальной задачи существует, оно единственно и обладает необходимыми свойствами гладкости.
При численном решении задачи Коши
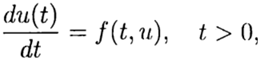 (2)
(2)
 (3)
(3)
по известному решению в точке t =0 необходимо найти из уравнения (3) решение при других t. При численном решении задачи (2),(3) будем использовать равномерную, для простоты, сетку по переменной t с шагом т > 0.
Приближенное решение задачи (2), (3) в точке  обозначим
обозначим  . Метод сходится в точке
. Метод сходится в точке  если
если  при
при  . Метод имеет р-й порядок точности, если
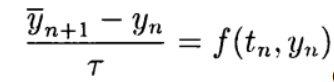
. Метод имеет р-й порядок точности, если  , р > 0 при . Простейшая разностная схема для приближенного решения задачи (2),(3) есть
, р > 0 при . Простейшая разностная схема для приближенного решения задачи (2),(3) есть
 (4)
(4)
При  имеем явный метод и в этом случае разностная схема аппроксимирует уравнение (2) с первым порядком. Симметричная схема
имеем явный метод и в этом случае разностная схема аппроксимирует уравнение (2) с первым порядком. Симметричная схема  в (4) имеет второй порядок аппроксимации. Эта схема относится к классу неявных — для определения приближенного решения на новом слое необходимо решать нелинейную задачу.
в (4) имеет второй порядок аппроксимации. Эта схема относится к классу неявных — для определения приближенного решения на новом слое необходимо решать нелинейную задачу.
Явные схемы второго и более высокого порядка аппроксимации удобно строить, ориентируясь на метод предиктор-корректор. На этапе предиктора (предсказания) используется явная схема
 (5)
(5)
а на этапе корректора (уточнения) — схема

В одношаговых методах Рунге—Кутта идеи предиктора-корректора реализуются наиболее полно. Этот метод записывается в общем виде:
 (6),
(6),

Формула (6) основана на s вычислениях функции f и называется s-стадийной. Если  при
при  имеем явный метод Рунге—Кутта. Если при j>1 и
имеем явный метод Рунге—Кутта. Если при j>1 и  то
то  определяется неявно из уравнения:
определяется неявно из уравнения:
 (7)
(7)
О таком методе Рунге—Кутта говорят как о диагонально-неявном. Параметры  определяют вариант метода Рунге—Кутта. Используется следующее представление метода (таблица Бутчера)
определяют вариант метода Рунге—Кутта. Используется следующее представление метода (таблица Бутчера)
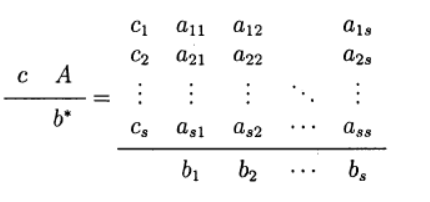
Одним из наиболее распространенных является явный метод Рунге—Кутта четвертого порядка
 (8)
(8)
Метод Рунге—Кутта— Фельберга
Привожу значение расчётных коэффициентов метода
 (9)
(9)
С учётом(9) общее решение имеет вид:
 (10)
(10)
Это решение обеспечивает пятый порядок точности, остаётся его адаптировать к Python.
Вычислительный эксперимент по определению абсолютной погрешности численного решения нелинейного дифференциального уравнения  с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
 с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга
с использованием обеих функций def odein(),def oden() модуля scipy.integrate и адаптированного к Python методов Рунге—Кутта и Рунге—Кутта— Фельберга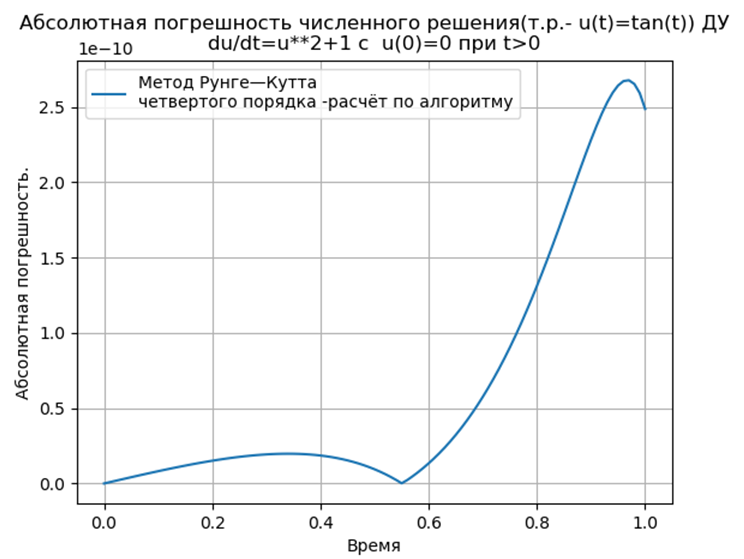


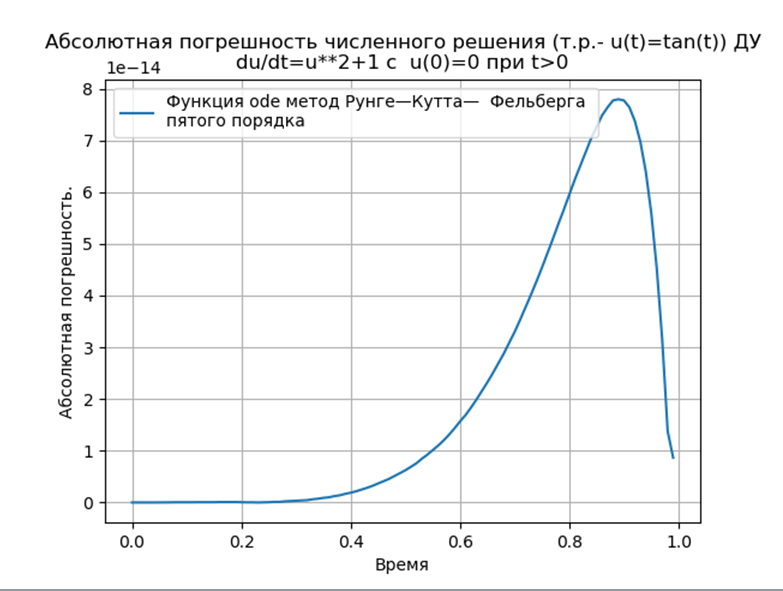
Адаптированные к Python методы Рунге—Кутта и Рунге—Кутта— Фельберга имеют меньшую абсолютную, чем решение с применением функции odeint, но большую, чем с использованием функции edu. Необходимо провести исследование быстродействия.
Численный эксперимент по сравнению быстродействия численного решения СДУ при использовании функции ode с атрибутом dopri5 (метод Рунге – Кутты 5 порядка) и с использованием адаптированного к Python метода Рунге—Кутта— Фельберга
Сравнительный анализ проведём на примере модельной задачи, приведенной в [2]. Чтобы не повторять источник, приведу постановку и решение модельной задачи из [2].
Решим задачу Коши, описывающую движение тела, брошенного с начальной скоростью v0 под углом α к горизонту в предположении, что сопротивление воздуха пропорционально квадрату скорости. В векторной форме уравнение движения имеет вид

где  – радиус вектор движущегося тела,
– радиус вектор движущегося тела,  – вектор скорости тела,
– вектор скорости тела,  – коэффициент сопротивления, вектор
– коэффициент сопротивления, вектор  силы веса тела массы m, g – ускорение свободного падения.
силы веса тела массы m, g – ускорение свободного падения.
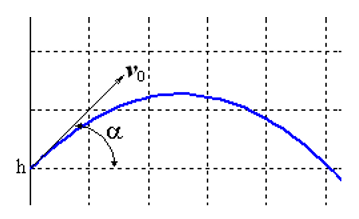
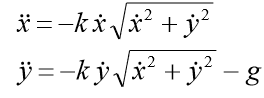
Особенность этой задачи состоит в том, что движение заканчивается в заранее неизвестный момент времени, когда тело падает на землю. Если обозначить  , то в координатной форме мы имеем систему уравнений:
, то в координатной форме мы имеем систему уравнений:
К системе следует добавить начальные условия:  (h начальная высота),
(h начальная высота),  . Положим
. Положим  . Тогда соответствующая система ОДУ 1 – го порядка примет вид:
. Тогда соответствующая система ОДУ 1 – го порядка примет вид:

Для модельной задачи положим  . Опуская довольно обширное описание программы, приведу только листинг из комментариев к которому, думаю, будет ясен принцип её работы. В программу добавлен отсчёт времени работы для сравнительного анализа.
. Опуская довольно обширное описание программы, приведу только листинг из комментариев к которому, думаю, будет ясен принцип её работы. В программу добавлен отсчёт времени работы для сравнительного анализа.
Flight time = 1.2316 Distance = 5.9829 Height =1.8542
Flight time = 1.1016 Distance = 4.3830 Height =1.5088
Flight time = 1.0197 Distance = 3.5265 Height =1.2912
Flight time = 0.9068 Distance = 2.5842 Height =1.0240
Время на модельную задачу: 0.454787

Для реализации средствами Python численного решения СДУ без использования специальных модулей, мною была предложена и исследована следующая функция:
def increment(f, t, y, tau
k1=tau*f(t,y)
k2=tau*f(t+(1/4)*tau,y+(1/4)*k1)
k3 =tau *f(t+(3/8)*tau,y+(3/32)*k1+(9/32)*k2)
k4=tau*f(t+(12/13)*tau,y+(1932/2197)*k1-(7200/2197)*k2+(7296/2197)*k3)
k5=tau*f(t+tau,y+(439/216)*k1-8*k2+(3680/513)*k3 -(845/4104)*k4)
k6=tau*f(t+(1/2)*tau,y-(8/27)*k1+2*k2-(3544/2565)*k3 +(1859/4104)*k4-(11/40)*k5)
return (16/135)*k1+(6656/12825)*k3+(28561/56430)*k4-(9/50)*k5+(2/55)*k6
Функция increment(f, t, y, tau) обеспечивает пятый порядок численного метода решения. Остальные особенности программы можно посмотреть в следующем листинге:
Время на модельную задачу: 0.259927

Предложенная программная реализация модельной задачи без использования специальных модулей имеет почти в двое большее быстродействие, чем с функцией ode, однако нельзя забывать, что ode имеет более высокую точность численного решения и возможности выбора метода решения.
Решение краевой задачи с поточно разделёнными краевыми условиями
Приведем пример некоторой конкретной краевой задачи с поточно разделенными краевыми условиями:
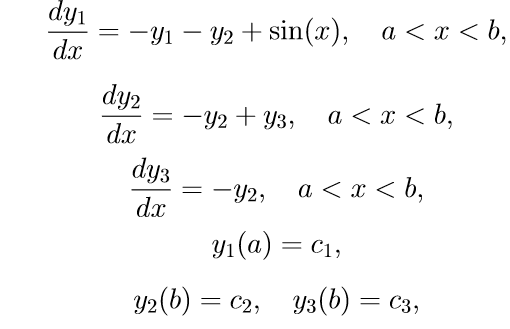 (11)
(11)
Для решения задачи (11) используем следующий алгоритм:
1. Решаем первые три неоднородные уравнения системы (11) с начальными условиями 
Введем обозначение для решения задачи Коши: 
2. Решаем первые три однородные уравнения системы (11) с начальными условиями 
Введем обозначение для решения задачи Коши: 
3. Решаем первые три однородные уравнения системы (11) с начальными условиями

Введем обозначение для решения задачи Коши:

4. Общее решение краевой задачи (11) при помощи решений задач Коши записывается в виде линейной комбинации решений: 
где p2, p3 — некоторые неизвестные параметры.
5. Для определения параметров p2, p3, используем краевые условия последних двух уравнений (11), то есть условия при x = b. Подставляя, получим систему линейных уравнений относительно неизвестных p2, p3:
 (12)
(12)
Решая (12), получим соотношения для p2, p3.
По приведенному алгоритму с применением метода Рунге—Кутта—Фельберга получим следующую программу:
y0[0]= 0.0
y1[0]= 1.0
y2[0]= 0.7156448588231397
y3[0]= 1.324566562303714
y0[N-1]= 0.9900000000000007
y1[N-1]= 0.1747719838716767
y2[N-1]= 0.8
y3[N-1]= 0.5000000000000001
Время на модельную задачу: 0.070878

Вывод
Разработанная мною программа отличается от приведенной в [3] меньшей погрешностью, что подтверждает приведенный в начале статьи сравнительный анализ функции odeint с реализованным на Python метода Рунге—Кутта—Фельберга.
3. Н.М. Полякова, Е.В. Ширяева Python 3. Создание графического интерфейса пользователя (на примере решения методом пристрелки краевой задачи для линейных обыкновенных дифференциальных уравнений). Ростов-на-Дону 2017.
Digiratory
Лаборатория автоматизации и цифровой обработки сигналов
Устойчивость нелинейных систем
Анализ устойчивости систем является одним из важнейших этапов проектирования систем управления, однако при анализе нелинейных, строго говоря, нет метода отвечающего критериям необходимости и достаточности, а критерии являются, как правило только достаточным (для устойчивости). Исходя из этого, для некоторых систем невозможно однозначно говорить о неустойчивости.
В классической теории управления имеется два основных аналитических метода: первый и второй методы Ляпунова, а также достаточно большое количество модификаций второго метода, как не связанного с линеаризацией.
Рассмотрим применение классических методов Ляпунова.
Первый метод Ляпунова
Позволяет судить об устойчивости положения равновесия по линеаризованным уравнениям. Метод основан на утверждениях:
- если собственные значения линеаризованной системы имеют отрицательные действительные части (линеаризованная система асимптотически устойчива), то положение равновесия нелинейной системы устойчиво «в малом»;
- если среди собственных значений линеаризованной системы имеются «правые», то положение равновесия нелинейной системы неустойчиво;
- если имеются некратные собственные значения на мнимой оси, а остальные — «левые», то в этом критическом случае по линеаризованной модели нельзя судить об устойчивости положения равновесия нелинейной системы.
Таким образом для анализа системы по первому методу Ляпунова необходимо:
- Найти положение равновесия системы — движений в системе нет (т.е. скорости и ускорения равны нулю) \[ \frac <\mathrm
v_><\mathrm t>= <0>\] - Линеаризовать систему в окрестности точки равновесия
- Записать полученное линеаризованное дифференциальное уравнение в матричной форме (составить матрицу А)
- Составить характеристический полином линеаризованной системы: \[
- Найти корни характеристического полинома. По виду корней сделать заключение о характере процессов в системе.
Основными недостатками первого метода Ляпунова являются:
- Если имеется корень на мнимой оси, то невозможно сказать о поведении процессов в системе.
- Возможно говорить только об устойчивости «в малом», т.е. при больших отклонениях от положения равновесия система может быть неустойчивой.
Пример 1.
Исследуем систему описываемую дифференциальными уравнениями:
Шаг 1. Положение равновесия:
Для нахождения точек равновесия левые части уравнений приравниваются к 0, что эквивалентно тому, что переменные состояния являются константами, а все их производные равны 0.
Шаг 2. Линеаризация для малых отклонений
Для линеаризации малых отклонений в точке равновесия старшие степени переменных, входящих в уравнения принимаются равными нулю.
Шаг 3. Линеаризованное управление в матричной форме
Преобразуем полученную линейную систему уравнений в матричный вид.
Шаг 4. Характеристический полином
Шаг 5. Корни характеристического полинома
Приравниваем характеристический полином к 0 и находим корни уравнения.
Заключение об устойчивости системы
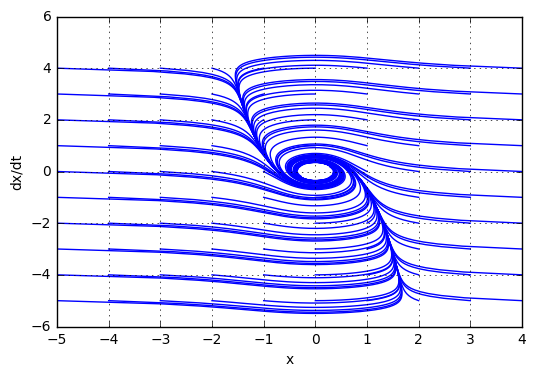
в данном примере при линеаризации система имеет два корня с отрицательной вещественной частью, т.е. мы можем сказать, что система устойчива «в малом» (при больших отклонениях система может быть неустойчива).
Подтвердим теоретический вывод компьютерным моделированием (построением фазового портрета)
При этом, при начальных условиях, находящиеся дальше от точки равновесия, система становится неустойчивой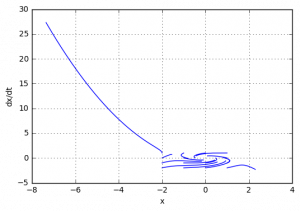
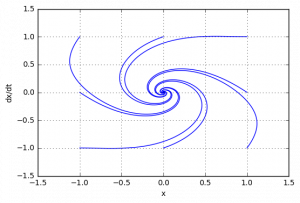
Пример 2. Нелинейный осциллятор
В качестве второго примера рассмотрим нелинейный осцилятор описываемый системой дифференциальных уравнений:
Аналогично первому примеру выполняем последовательность шагов
Шаг 1. Положение равновесия:
Шаг 2. Линеаризация для малых отклонений
Шаг 3. Линеаризованное управление в матричной форме
Шаг 4. Характеристический полином
Шаг 5. Корни характеристического полинома
Заключение об устойчивости системы
Рассматриваемая система является критическим случаем о ее устойчивости невозможно судить по линеаризованным уравнениям, применяемым в первом методе Ляпунова.
Второй метод Ляпунова
Второй метод Ляпунова не связан с линеаризацией системы, поэтому также называется прямым методом.
Для начала необходимо ввести понятия знакоопределенной, знакопостоянной и знакопеременной функций. Пусть имеется функция нескольких переменных:
Функция \(V \) называется знакоопределенной в некоторой области, если она во всех точках этой области вокруг начала координат сохраняет один и тот же знак и нигде не обращается в нуль, кроме только самого начала координат
\[ \left ( V\left ( \bar <0>\right )=0 \right ) \]
Функция \(V \) называется знакопостоянной, если она сохраняет один и тот же знак, но может обращаться в нуль не только в начале координат, но и в других точках данной области.
Функция \(V \) называется знакопеременной, если она в данной области вокруг начала координат может иметь разные знаки.
Теорема Ляпунова об устойчивости нелинейных систем
Если при заданных в форме
уравнениях системы n-го порядка можно подобрать такую знакоопределенную функцию Ляпунова
чтобы ее производная по времени
тоже была знакоопределенной (или знакопостоянной), но имела знак противоположный знаку \(V\), то данная система устойчива.
Для упрощения скажем, что функция Ляпунова должна быть положительной знакоопределенной функцией. Тогда условия теоремы Ляпунова будут выглядеть следующим образом:
Для устойчивости положения равновесия достаточно существования дифференцируемой функции
называемой функцией Ляпунова, удовлетворяющей в окрестности начала координат следующим условиям:
- \(V\left ( v_<1>, v_<2>,…, v_
\right ) \geq 0\) причем \(V=0\) лишь при следующем условии, означающем что функция \(V\) имеет строгий минимум в начале координат. \[ \bar = \begin v_ <1>\\ \vdots \\ v_ \end = \bar <0>\] - Производная функции по времени \[ \frac <\mathrm
V\left ( \bar \right )><\mathrm t>=\sum_ \frac<\partial V><\partial v_>\frac <\mathrm v_><\mathrm t>=\begin \frac<\partial V><\partial v_<1>> & \frac<\partial V><\partial v_<2>> & \cdots & \frac<\partial V><\partial v_>\end \begin \frac <\mathrm v_<1>><\mathrm t>\\ \frac <\mathrm v_<2>><\mathrm t>\\ \vdots \\ \frac <\mathrm v_ ><\mathrm t>\end \] в силу дифференциального уравнения \(\frac <\mathrm \bar ><\mathrm t>=\bar<\varphi >\left ( \bar \right ) \) является отрицательной знакопостоянной функцией, т.е. \[ \frac <\mathrm V\left ( \bar \right )><\mathrm t>=grad\bar \cdot \frac <\mathrm \bar ><\mathrm t>=grad\bar \cdot \bar<\varphi>\left ( \bar \right )\leq 0 \] при \(t\geq t_<0>\)
Таким образом, условия:
- \(\frac <\mathrm
V\left ( \bar \right )><\mathrm t>\leq 0\) и функция \(V\left ( v_<1>, v_<2>,…, v_ \right ) \) является положительной знакоопределенной — это является достаточным условием устойчивости - \(\frac <\mathrm
V\left ( \bar \right )><\mathrm t> \) — отрицательно определенная — это является достаточным условием асимптотической устойчивости. - \(\left \| v \right \|\rightarrow \infty : \frac <\mathrm
V\left ( \bar \right )><\mathrm t>\rightarrow \infty \) — достаточное условие устойчивости «в целом».
Для анализа системы по второму методу Ляпунова необходимо:
- Выбрать функцию Ляпунова от n переменных, где n- порядок системы.
- Найти частные производные по переменным.
- Вычислить производную функции по времени \(\frac <\mathrm
V\left ( \bar \right )><\mathrm t>\). Проанализировать полученный знак производной.
Из-за того, что второй метод Ляпунова не связан с линеаризацией, он считается универсальным. Однако он имеет ряд недостатков:
- Нет общих требований по выбору функции V
- Достаточный характер утверждения (если условия не выполняются, то об устойчивости ничего сказать нельзя, а можно посоветовать подобрать другую функцию \(V \))
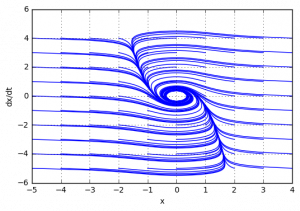
Пример 3. Нелинейный осциллятор
Проанализируем систему из примера (2).
Шаг 1. Функция Ляпунова
Для начала необходимо выбрать функцию Ляпунова от 2-х переменных (т.к. два вектора состояния):
Шаг 2. Частные производные
Шаг 3. Производная функции
Подставим в выражение значения исходя из ДУ:
Заключение об устойчивости системы
Исследовав систему первым методом Ляпунова мы не смогли сделать конкретный вывод об устойчивости системы, что позволил нам сделать второй метод Ляпунова. В результате мы можем сделать вывод, что система является асимптотически устойчивой.
Аналогично проверим с помощью моделирования:
Пример 4.
Рассмотрим систему, описываемую следующей системой дифференциальных уравнений:
Очевидно, что применение первого метода Ляпунова невозможно, т.к. матрица А состоит из нулей, а, следовательно, собственные значения равны нулю. Поэтому применим второй метод Ляпунова:
Шаг 1. Функция Ляпунова
Выбор функции Ляпунова второго порядка
Шаг 2. Частные производные
Шаг 3. Производная функции
При \(a=3\) имеет место асимптотическая устойчивость.
Заключение об устойчивости системы
Система является устойчивой.
Фазовый портрет системы выглядит следующим образом:
Нелинейные дифференциальные уравнения и системы со специальными свойствами решений Текст научной статьи по специальности « Математика»
Аннотация научной статьи по математике, автор научной работы —
Изложены результаты исследований, касающиеся построения и исследования аналитических свойств решений нелинейных дифференциальных уравнений и систем (обыкновенных и в частных производных) специального вида.
Похожие темы научных работ по математике , автор научной работы —
NONLINEAR DIFFERENTIAL EQUATIONS AND SYSTEMS WITH SPECIAL PROPERTIES OF SOLUTIONS
The results concerning the construction and research of analytic properties of solutions to nonlinear (ordinary and partial) differential equations and systems of special type are presented.
Текст научной работы на тему «Нелинейные дифференциальные уравнения и системы со специальными свойствами решений»
НЕЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ И СИСТЕМЫ СО СПЕЦИАЛЬНЫМИ СВОЙСТВАМИ РЕШЕНИЙ
Белорусский государственный университет информатики и радиоэлектроники П. Бровки, 6, Минск, 220013, Беларусь
Поступила в редакцию 23 января 2014
Изложены результаты исследований, касающиеся построения и исследования аналитических свойств решений нелинейных дифференциальных уравнений и систем (обыкновенных и в частных производных) специального вида.
Ключевые слова: уравнения Пенлеве, гамильтониан, модели случайно-матричного типа, автомодельное решение, системы с хаотическим поведением.
В настоящее время общепризнанным является тот факт, что неприводимые уравнения Пенлеве, полученные французским математиком Пенлеве и его коллегами в начале XX века, играют роль нелинейных аналогов для классических специальных функций. Основное свойство уравнений Пенлеве состоит в том, что их общие решения не имеют подвижных критических особых точек. Данное свойство часто называют Р-свойством, а уравнения с Р-свойством решений — уравнениями Пенлеве-типа или Р-типа. В связи с тем, что отмеченное свойство является в определенном смысле критерием интегрируемости, исключительно актуальной на протяжении трех последних десятилетий является задача построения и исследования аналитических свойств решений нелинейных уравнений и систем высших порядков с Р-свойством решений. Указанные уравнения и системы называют аналогами уравнений Пенлеве высших порядков или высшими аналогами уравнений Пенлеве. Высшие аналоги уравнений Пенлеве (как и сами уравнения Пенлеве) имеют весьма широкий спектр приложений, причем некоторые из них являются автомодельными редукциями хорошо известных высших аналогов нелинейных уравнений в частных производных, таких как Кортевега-де Фриза, Кодри-Додда-Гибона, Каупа-Купершмидта и др.
В данной работе излагаются некоторые результаты, полученные автором за последние пять лет и связанные с: 1) построением нелинейных систем обыкновенных дифференциальных уравнений (ОДУ) второго порядка и выше специального вида и исследованием аналитических свойств их решений; 2) исследованием аналитических свойств решений систем нелинейных ОДУ (связанных, в частности, с моделями случайно-матричного типа) на предмет принадлежности их к системам Р-типа; 3) построением точных автомодельных редукций систем нелинейных уравнений в частных производных (имеющих конкретные приложения) к системам ОДУ с Р-свойством решений.
Результаты предыдущих исследований автора по указанной тематике (начиная с 1983 г.) отражены в публикациях 12.
Преобразования Беклунда уравнений для полиномиальных гамильтонианов, ассоциированных со вторым и четвертым уравнениями Пенлеве
В работах [34] построены системы дифференциальных уравнений
ш» = уш’ — — а, у» = шу’ — уу’ — Ь; (1)
ш’у’ — 2а(у — ш)2 — (у2 — ш2) = в, ш’ + у’ + — у) + (ш — у)2 = 0, (2)
где ш, у — неизвестные функции независимой переменной г; а, Ь, а, в — произвольные постоянные параметры.
Показано, что система (1) является системой Пенлеве-типа, причем она может быть преобразована к виду
ш»2 = —2ш’3 — 2(а + Ь)ш’2 + 2(а + + а2, (3)
у»2 = —2у’3 — 2(а + Ь)у’2 + 2(а + Ь)уу’ + Ь2. (4)
Без ограничения общности можно считать а + Ь = 1, причем а = а — г — — , г2 = 1, а ■
произвольный параметр. Тогда уравнение (3) принимает вид
ш»2 = —2ш’3 — 2гш’2 + + (а — |)2. (5)
Уравнению (5) удовлетворяет функция = 2Я(г, и(г), Г(г)), где
Н(г, и, Г) = ^т + г + |) и — (а — |) — гамильтониан, ассоциированный со вторым уравнением Пенлеве
Г’ = 2Г3 + гГ + а. (Р2)
Для уравнения (5) построено преобразование Беклунда, а также получены нелинейные алгебраические соотношения, связывающие решения уравнения (5) при различных значениях параметра а.
С помощью преобразования У = = —— относительно новых неизвестных
функций и, V система (2) принимает вид
1 (и ‘2 — г’2) — 2а^2 + иг = и’ + + V2 = 0. (6)
Показано, что решения системы (6) выражаются через решения четвертого уравнения Пенлеве
=1_ + 1у3 + 42У2 + 2(22 —2а)+в. (Р4)
На основании этого доказана
Теорема 1. Система (2) является системой Пенлеве-типа. Показано, что функции ш, у удовлетворяют уравнениям
ш»2 — 4(ш — гш’)2 + 2(ш’ + 2а + 1)(2ш’2 + в) = 0, (7)
У2 — 4(у — гу’)2 + 2(у ‘ + 2а — 1)(2у’2 + в) = 0 (8)
Отметим, что по аналогии с уравнением (Р2) уравнение (7) есть уравнение для
полиномиального гамильтониана, ассоциированного с уравнением (Р4). Уравнение (8) получается из (7) преобразованием ш^у, а^а — 1.
Неполиномиальные гамильтонианы, ассоциированные с третьим и пятым
В последние три десятилетия наблюдается значительный интерес к исследованию определенных классов непрерывных и дискретных вероятностных моделей, известных под названием «модели случайно-матричного типа». Источники таких моделей весьма разнообразны.
Одной из наиболее важных характеристик указанных моделей является «нуль вероятность» — вероятность отсутствия частиц в заданном интервале или объединении
интервалов. Нуль вероятности, как правило, могут быть представлены в виде определителей Фредгольма det(1 — |о, где К — есть некоторый интегральный оператор с ядром специального вида, а 0 — множество, где не должно быть частиц. Единственный известный на настоящий момент способ вычисления таких определителей состоит в их характеризации как решений некоторого однородного дифференциального уравнения (ОДУ) или системы уравнений с частными производными.
Известно, что однопараметрическое семейство решений уравнения
Н—-— = — sh2ф + 2a0z 1 • sh ф (а0 — параметр),
являющегося частным случаем уравнения
zww» = zw’2 — ww’ + aw3 + ^w + yzw4 + 5z, (P3)
выражается в терминах определителей Фредгольма специального типа. В работах E. Barouch, B.M. Mc Coy, C.A.Tracy, T.T. Wu, посвященных решению классической проблемы вычисления спиновых корреляционных функций двумерной модели Изинга, был установлен следующий результат: скейлинговый предел двухточечной корреляционной функции модели Изинга допускает замкнутое выражение через решение уравнения (P3) при а=р = 0,у = —б = 1. Характерно, что главная часть этого выражения (формулы) содержит гамильтониан
=i[w2u2 — 3wu — 4- «z2w2 + 9 + —], (9)
0zL W2 4 4 2 J V/
ассоциированный с уравнением (P3) в случае а = в = 0,у = —б = 1. В работе [35] доказана
Теорема 2. Уравнение (Р3) представимо в виде системы Гамильтониана с гамильтонианом
^ _ apW2(u+P)2 ffoW(u+P) aw в__yzw2 5z
z z 2а0 2а0 4а0 4a0w2
где а0 ^ 0, р0 — произвольные постоянные; Р(г, ш), ш) — аналитические функции,
Формула (10) является обобщением (9), а также формулы гамильтониана Гарнье, ассоциированного с уравнением (Р3), и имеющего вид
1S 1 Го 2 2 о az I yz2w2 5z2T
1 z L 4 4w 8 8w2J
В работе [35] для пятого уравнения Пенлеве
— = г2(3ш — 1)ш’2 — — 1)ш’ + 2аш2(ш — 1)3 +
+2£(ш — 1)3 + — 1) + 2 Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
а = —/? = 1 (а2 + — с2), у = 0,5 = —2. Тогда функция д(5) = у(^)+1, 22 = ^ является
решением уравнения (20).
Теорема 4. Система (11) — (13) является системой Пенлеве-типа. Доказательство последнего утверждения основано на том, что общее решение уравнения (20) рациональным образом выражается через решение уравнения (Р5), которое не имеет подвижных критических особых точек. Остальные неизвестные функции р, и, V из системы (11) — (13) также не имеют подвижных критических особых точек, так как
— 1и = яд^д’У — (яд’)2 — ^д4 — ^
8^ = 4$д2 — 4и — и2 + ст,р = 5д’ — ^-ди.
2. Рассмотрим систему М. И18ака^ дифференциально-разностных уравнений
где £ — непрерывная независимая переменная, п — произвольный параметр. Система (21), (22) ассоциируется с уравнением (п + 1)5» = ¿(5п+т + 5п-1)(1 — 5»), представляющим второе дискретное уравнение Пенлеве и дискретным модифицированным уравнением Кортевега-де
Фриза = —(5»+т — 5»-т)(1 — 5»). Получена редукция системы (21), (22) к частному случаю
системы Пенлеве-типа [22], ассоциированной с уравнением (Р5) в случае 5 = 0.
3. Относительно переопределенной системы нелинейных уравнений в частных производных
где an — неизвестная функция независимых переменных х, у; n, р, q, — произвольные постоянные параметры;
Теорема 5. Система (23) совместна, если ху = z, а функция an = an(z) выражается через решения уравнения (Р5) с параметрами а = 2р, 2^ = —(п + 1)2,у = 2,5 = 2q, причем
Система (23) в случае р = q = 0 получена М. Hisakado при исследовании двумерного уравнения Тоды и струнных уравнений.
4. Рассмотрена система дифференциальных уравнений
q’ = р — qu + as, v’ = —pq — asq, (24)
p’ = sq — 2qv + pu + asu, u’ = — q2, (25)
где s — независимая переменная, a — произвольный постоянный параметр. В случае a = 0 система (24), (25) соответствует модели случайно-матричного типа с ядром Эйри. Характерной
особенностью системы (24), (25) является то, что она является системой Гамильтона с
гамильтонианом Н = ——— + q2v — pqu + asp — asqu и имеет первый интеграл
u2 — 2v — q2 = С, где С — произвольная постоянная. Имеет место
Теорема 6. Система (24), (25) является системой Пенлеве-типа. Ее решения выражаются через решения второго уравнения Пенлеве q» = 2q3 + (s + C)q + a’
5. Рассмотрена система нелинейных дифференциальных уравнений (отвечающая модели случайно-матричного типа с ядром Эрмита)
q’ = —sq + (V2N — 2u)p, w’ = p2, (26)
p’ = sp — (V2N + 2w)q, u’ = —q2, (27)
с неизвестными функциями q, w, p, u независимой переменной s и натуральным параметром N.
Теорема 7. Система дифференциальных уравнений (26), (27) удовлетворяет формальному тесту Пенлеве.
При этом получено представление решения системы (26), (27) в виде формальных рядов
q = a-1x-1 + a1x + a2x2 + ••• ,т = s — s0, w = (4a-1x)-1 + Ь0 + Ь1х + b2x2 + ••• p = (2a-1x)-1 + c1x + c2x2 +— u = a-1x-1 + u0 + u1x + u2x2 + •••,
содержащих четыре произвольных параметра s0, a-1 ^ 0, c1, c2.
6. Dyson процессы, описываемые системой нелинейных дифференциальных уравнений
r’ = —pu, u» = (x2 — 2n — 1)u + 2u2p, p» = (x2 — 2n + 1) + 2p2u , (28)
также ассоциируются с моделями случайно-матричного типа. В системе (28) р, г, и неизвестные функции независимой переменной х; п — произвольный постоянный параметр. Справедлива Теорема 8. Пусть w = w(x) решение уравнения
ш»’ — 6ш2ш’ + 2(х2 — 2п — 2)ш’ — 2ш2 + 4шх + 2х2 — 2(2п + 2) = 0. (29)
при фиксированном значении параметра п. Тогда функции и = ехр[/ ш(х^х], р = [и» — (х2 — 2п — 1)и](2и2)-1, г = т[—ш» + 2ш3 — 2ш(х2 — 2п — 1) — 2ст] (ст -произвольная постоянная) являются решениями системы (28).
Следует отметить, что последовательным преобразованием х ^ ¿х, ш ^ — ¿ш, ш = д(х) + х, ¿2 = —1 уравнение (29) сводится к уравнению третьего порядка относительно неизвестной функции д, первым интегралом которого является уравнение (Р4) с произвольным параметром в и 2а = п + 1.
Автомодельные редукции систем нелинейных уравнений в частных производных к
Как отмечалось во введении, одно из важнейших свойств уравнений Р—типа состоит в том, что они являются точными автомодельными редукциями хорошо известных нелинейных уравнений в частных производных и их высших аналогов. Указанное обстоятельство позволяет не только строить точные решения уравнений в частных производных, но и переносить некоторые хорошо известные свойства решений последних на решения уравнений Пенлеве-типа. 1. Система нелинейных уравнений в частных производных
Ф г — 3(ф^ + иф) = 0, (30)
с неизвестными функциями и, ф, ф независимых переменных х, £, (моделирующая процессы взаимодействия и распространения волн в плазме) введением новой независимой переменной = х + допускает редукцию к системе обыкновенных дифференциальных уравнений
ф’ — 3ф» — 3иф = 0, (31)
В системе (31) (‘) и (») обозначают производные первого и второго порядка соответственно по переменной г. Решения и(г), ф(г), ф(г), г = х + £ будем называть решениями типа бегущей волны системы (30). Наличие двух первых интегралов и + 6фф = сг, фф + 3(ф’ф — фф’) = с2 (с2,с2 — произвольные постоянные), а также первое уравнение системы (31) позволяют получить дифференциальное уравнение, которому удовлетворяет функция ф
(3с! — 18с2)ф2 + (1 + 18 с1)фф» + 9ф’2 + 27ф’ф» — 9фф»’ = 0. (32)
С помощью подстановки р(г) = ф’ф 1 уравнение (32) допускает понижение порядка
„„» ^2 1 + 18 С, СХ-6С2 „
р — 2р3 — р2——р——= 0. (33)
Решение уравнения (33) может быть представлено в терминах эллиптических функций Якоби.
2. В работах, связанных с исследованием моделей случайно-матричного типа, получено нелинейное уравнение в частных производных
где •Д» = £2=1х;2 —,п = 1,3; /- неизвестная функция независимых переменных
хг,х2, ^,х2Г. С уравнением (34) ассоциируется множество Е = и[=1[х2(-1,х2(] с М. Преобразованием = /(т), т = х1 + х2 + — х2г уравнение (34) сводится к уравнению
гш'»1 — 2тш’1 + + 6гш’2 = 0 = = «з^1), имеющему первый интеграл
ш»2 + 4ш’3 — ^тш’2 + ^^^ = сг, (35)
где — произвольная постоянная. Замена = А^, т = щ z, А]^ = 1, ц3 = г позволяет свести (35) к уравнению (5).
Теорема 9. Пусть w = — решение уравнения (5) при фиксированных значениях параметров а и 8. Тогда функция /(т) = А^^ш (— ),т = х1,х2, . х2Г, А^ = 1, ц3 = г является
решением уравнения (34).
3. Исследованы некоторые аналитические свойства автомодельных решений системы трех нелинейных уравнений в частных производных [36]
— а2и** — иуу — ид — аи2у = 0, (36)
у + а2^** + ууу + уд + аиу2 = 0, (37)
Чх* — а2дуу + = 0 (38)
с неизвестными функциями и, у, д независимых переменных х, у, £. В системе (36)-(38) а4 = 1, а — отличный от нуля параметр. Введением новой неизвестной функции ф = ехр(Я — ¿5), где Я = 11п(—иу),5 = 11п (— ¿2 = —1, система (36) — (38) сводится к резонансной системе Дэви-Стюартсона
¿ф + + фуу — 2ст2(|ф^| + ст2|фуу|)фЖ-1 — Чф + «Ж2ф = 0, (39)
9** — ^2Чуу — 2а(Ж2)^ = 0. (40)
Система (39), (40) является расширением хорошо известного резонансного уравнения Шредингера
Ж + — 2а2|ф**| • ф • |ф|-1 — а|ф|2ф = 0. (41)
Действительно, если неизвестные функции в системе (39)-(40) не зависят от у, то она вырождается в уравнение (41). При этом система (36)-(38) принимает вид
и£ — а2и** + аи2у = 0, (42)
и при редукционном ограничении у = и* (* — означает сопряжение к и), а также заменой £ ^ И она превращается в нелинейное уравнение Шредингера
— а2и** — а|и|2и = 0. (44)
Известно, что система (36)-(38) при выполнении определенного условия удовлетворяет тесту Вайса-Табора-Карневейла. Для случая, если система (36)-(38) не проходит тест Вайса-Табора- Карневейла, получены два семейства точных автомодельных решений, выражающихся через элементарные функции. Получена также редукция системы (36)-(38) к системе двух нелинейных связанных уравнений Шредингера с двумя независимыми переменными. На основании этого доказано существование у исследуемой системы автомодельных решений, порождаемых решениями уравнения (Р2), а также уравнения (Р4).
Говоря о приложениях уравнений Пенлеве-типа к моделям случайно-матричного типа, следует отметить, что важную роль здесь играют асимптотические свойства решений уравнений для полиномиальных гамильтонианов, ассоциированных с неприводимыми уравнениями Пенлеве. Важнейшей характеристикой системы в статистической физике, квантовой механики (где теория случайных матриц играет ведущую роль), как известно, является ее гамильтониан. Тест Пенлеве удобно применять к исследованию и других систем (подобных (26), (27)), ассоциированных с моделями случайно-матричного типа. При этом актуальным является доказательство сходимости формальных рядов Лорана, определяющих решение конкретной системы, если она проходит тест Пенлеве.
NONLINEAR DIFFERENTIAL EQUATIONS AND SYSTEMS WITH SPECIAL
PROPERTIES OF SOLUTIONS
V.V. TSEGELNIK Abstract
The results concerning the construction and research of analytic properties of solutions to nonlinear (ordinary and partial) differential equations and systems of special type are presented.
1. ГромакВ.И., ЦегельникВ.В. // Теорет. и матем. физика. 1983. Т. 55. №2. С. 189-196.
2. Цегельник В.В. // Теорет. и матем. физика. 1984. Т. 61. № 1. С. 155-160.
3. Цегельник В.В. // Докл. АН БССР. 1985. Т. 29. № 6. С. 497-500.
4. Громак В.И., Цегельник В.В. // Весщ АН БССР. Сер. ф1з.-мат. навук. 1988. № 1. С. 41-49.
5. Цегельник В.В. // Докл. АН БССР. 1988. Т. 32. № 5. С. 393-394.
6. Громак В.И., Цегельник В.В. // Теорет. и матем. физика. 1989. Т. 78. № 1. С. 22-34.
7. Громак В.И., Цегельник В.В. // Дифференц. уравнения. 1991. Т. 27. № 3. С. 396-402.
8. Громак В.И., Цегельник В.В. // Дифференц. уравнения. 1991. Т. 27. № 8. С. 1303-1312.
9. Цегельник В.В. // Весщ АН БССР. Сер. ф1з.-мат. навук. 1991. № 1. С. 118-120.
10. Цегельник В.В. // Дифференц. уравнения. 1994. Т.30. № 6. С. 992-997.
11. Громак В.И., Цегельник В.В. // Дифференц. уравнения. 1994. Т. 30. № 7. С. 1118-1124.
12. Цегельник В.В. // Теорет. и матем. физика. 1995. Т. 102. № 3. С. 364-366.
13. Фуксштейнер Б., Цегельник В.В. // Теорет. и матем. физика. 1995. Т. 105. № 2. С. 208-213.
14. Громак В.И., Цегельник В.В. // Дифференц. уравнения. 1996. Т. 32. № 8. С. 1018-1023.
15. Цегельник В.В. // Дифференц. уравнения. 1996. Т. 32. № 10. С. 1434-1435.
16. Цегельник В.В. // Теорет. и матем. физика. 1997. Т. 113. № 2. С. 285-288.
17. Цегельник В.В. // ДАН БССР. 1997. Т 41. № 3. С. 17-20.
18. Цегельник В.В. // Докл. АН БССР. Сер. ф1з.-мат. навук. 1997. № 3. С. 132-133.
19. Цегельник В.В. // Изв. ВУЗов. Прикл. нелинейная динамика. 1998. Т. 6. № 5. С. 84-88.
20. Цегельник В.В. // Весщ НАН Беларуси Сер. ф1з.-мат. навук. 1998. № 3. С. 61-63.
21. Tsegelnik V. V. //Reqular and chaotic dynamics. 1999. Vol. 4. № 4. P. 77-80.
22. Цегельник В.В. // Дифференц. уравнения. 1999. Т. 35. №7. С. 1003-1004.
23. Цегельник В.В. // Дифференц. уравнения. 2000. Т. 36. № 3. С. 425-426.
24. Цегельник В.В. // Докл. НАН Беларуси. 2000. Т. 44. № 3. С. 12-13.
25. Цегельник В.В. // Труды Ин-та математики НАН Беларуси. 2000. Т. 6. С. 139-141.
26. Цегельник В.В. // Докл. НАН Беларуси. 2001. Т. 45. № 2. С. 50-53.
27. Цегельник В.В. // Труды Ин-та математики НАН Беларуси. 2004. Т. 12. № 2. С. 176-179.
28. Цегельник В.В. // Докл. БГУИР. 2004. № 1. С. 64-72.
29. Цегельник В.В. // Докл. БГУИР. 2006. № 2. С. 142-148.
30. Цегельник В.В. // Докл. НАН Беларуси. 2006. Т. 50. № 5. С. 22-24.
31. Цегельник В.В. // Теорет. и матем. физика. 2007. Т. 151. № 1. С. 54-65.
32. Цегельник В.В. // Докл. БГУИР. 2008. № 2. С. 137-139.
33. Цегельник В.В. // Некоторые аналитические свойства и приложения решений уравнений Пенлеве-типа Минск 2007.
34. Цегельник В.В. // Докл. НАН Беларуси. 2010. Т. 54. № 1. С. 21-25.
35. Цегельник В.В. // Теорет. и матем. физика. 2010. Т. 162. № 1. С. 69-71.
36. Цегельник В.В. // Вестн. нац. исслед. ядерного университета «МИФИ». 2013. Т. 2. № 4. С. 422-424.
СВЕДЕНИЯ ОБ АВТОРE
Цегельник Владимир Владимирович родился (1954 г.р.). Окончил механико-математический факультет БГУ им. В.И. Ленина в 1977 г., в 1984 г. -заочную аспирантуру этого же университета по специальности дифференциальные уравнения и математическая физика. В 1985 г. защитил кандидатскую диссертацию, в 2002 г. — докторскую. С 1999 г. занимает должность заведующего кафедрой высшей математики БГУИР. Автор более 150 научных и научно-методических публикаций, среди которых ряд учебных пособий, монография и более 40 научных статей. Научные интересы — аналитическая теория нелинейных дифференциальных уравнений Пенлеве-типа и их приложения.
http://digiratory.ru/792
http://cyberleninka.ru/article/n/nelineynye-differentsialnye-uravneniya-i-sistemy-so-spetsialnymi-svoystvami-resheniy