Решение систем нелинейных уравнений (СНУ).
Дата добавления: 2014-05-05 ; просмотров: 5170 ; Нарушение авторских прав
При моделировании задача нахождения решения системы алгебраических или трансцендентных уравнений является распространенной вычислительной задачей. Например, к решению таких систем сводятся расчеты фазового и химического равновесия многокомпонентных смесей, расчеты статических режимов многих технологических процессов и др.
Запишем систему n нелинейных уравнений с n неизвестными (СНУ) в общем виде:
 f1(x1, x2, …, xn) = 0
f1(x1, x2, …, xn) = 0
Эту систему можно записать в компактной, операторной форме:
|

|

Решением системы называется набор значений  ,
,  (вектор X * ), при которых все функции fi равны 0 (система (5.1) обращается в тождество.)
(вектор X * ), при которых все функции fi равны 0 (система (5.1) обращается в тождество.)
СНУ могут иметь единственное решение, множество решений или вообще не иметь его. Поэтому численное решение СНУ проводят в два этапа:
1 этап – отделение решений.
2 этап – уточнение всех или только нужных решений.
5.1. Отделение решений.
Отделить решения – значит установить количество решений, определить приближенные значения каждого из них или указать область, в которой решение существует и является единственным.
Задача отделения решений достаточно просто решается только для системы двух уравнений с двумя неизвестными.
 f1(x1, x2) = 0
f1(x1, x2) = 0
Для этого необходимо в координатах (x1, x2) построить кривые
Точки пересечения этих кривых являются решениями системы. Так как координаты точек пересечения определяются приближенно, целесообразно говорить об области существования решения D. Эта область задается интервалами по каждой координате, внутри которых находятся искомые значения неизвестных.
 |
Рис. 5.1. Графическое отделение решений СНУ.
Для систем с большим числом неизвестных (n ³ 3) удовлетворительных общих методов определения области существования решения нет. Поэтому при решении СНУ эта область обычно определяется при анализе решаемой задачи, например, исходя из физического смысла неизвестных.
Отделение решений позволяет:
1. Выявить число решений и область существования каждого из них.
2. Проанализировать возможность применения выбранного метода решения СНУ в каждой области.
3. Выбрать начальное приближение решения X (0) из области его существования, так что X (0) ÎD.
При отсутствии информации об области существования решения СНУ выбор начального приближения X (0) проводиться методом проб и ошибок (методом “тыка”).
Пример 5.1. Отделить решения системы
 x 2 + y 2 =1
x 2 + y 2 =1
Запишем систему в стандартном виде (5.1).

Область определения функций
Очевидно, что решения могут быть только в общей области определения этих функций.

Решения существуют, т.к. D0 ≠ Æ.
Для отделения решения нужно построить графики функций в общей области определения.
График первой функции – окружность единичного радиуса с центром в начале координат.
Для построения графика второй функции нужно вычислить значение  в нескольких точках общей области определения D0:
в нескольких точках общей области определения D0:
— при x1 = +0 (очень маленькое положительное число) х2 = +¥.
— при x1 = (1/е) ≈ 0,33  .
.
— при x1 = 1 
 — при x1 = 0,5
— при x1 = 0,5 
Имеются два решения.
Область существования первого решения  ,
,
 .
.
Точность отделения решений зависит от точности построения графиков.
5.2. Методы уточнения решений СНУ.
Уточнение интересующего решения до требуемой точности ε производится итерационными методами.
Основные методы уточнения решений СНУ получены путем обобщения итерационных процессов, используемых при решении одного нелинейного уравнения.
5.2.1. Метод простых итераций.
Как и в случае одного уравнения, метод простых итераций заключается в замене исходной системы уравнений (5.1) эквивалентной системой
и построении итерационной последовательности
X ( k ) = Φ(X ( k -1) ) , где k=1,2,3,… — номер итерации, (5.4)
которая при k→∞ сходится к точному решению.
 Здесь — итерирующая вектор-функция, X (0)
Здесь — итерирующая вектор-функция, X (0)  D – начальное
D – начальное
В развернутом виде формула итерационного процесса (выражение для вычисления очередного k-го приближения решения) имеет вид:
xi. (k) = φi(x1 (k-1) , x2 (k-1) , … , xn (k-1) ),  . (5.5)
. (5.5)
Условие окончания расчета
δ≤ε (5.6)
где ε — заданная точность решения;
δ =  (5.7)
(5.7)
δ =  (5.8)
(5.8)
Итерационный процесс (5.5) сходиться к точному решению, если в окрестности решения соблюдаются условия сходимости:
 (5.9)
(5.9)
 (5.10)
(5.10)
Таким образом, для уточнения решения СНУ методом простых итераций нужно найти такое эквивалентное преобразование (5.1) в (5.3), чтобы в области существования решения выполнялись условия (5.9) или (5.10).
В простейшем случае эквивалентную систему можно получать как:
 ,
, 
Можно выделить (не обязательно явно) все неизвестные из уравнений системы так, что:
 ,
,
 Как и в случае одного уравнения задачу поиска эквивалентного преобразования можно свести к задаче определения (в простейшем случае подбора) значений констант li ≠ 0, , обеспечивающих сходимость
Как и в случае одного уравнения задачу поиска эквивалентного преобразования можно свести к задаче определения (в простейшем случае подбора) значений констант li ≠ 0, , обеспечивающих сходимость


Рис. 5.1. Схема алгоритма метода простых итераций.
|
Сходимость метода простых итераций можно несколько улучшить, если при вычислении очередного приближения  использовать уже найденные значения
использовать уже найденные значения 
Выражение для расчета очередного к-го приближения примет вид:
 , ; (5.11)
, ; (5.11)
Для реализации данного приема, аналогичного методу Гаусса-Зейделя для систем линейных уравнений, в алгоритм расчета следует внести изменения: формулу расчета очередного приближения (символ 5) записать как X=φ(x) или в развернутом виде:
 ,
,
Существуют и другие приемы улучшения сходимости метода простых итераций. Например, новое приближение вычислять как среднее арифметическое двух предшествующих приближений:
 , (5.12)
, (5.12)
Можно использовать поправку Эйткена для улучшения сходимости:
 , (5.13)
, (5.13)
Методом простых итераций уточнить ранее (пример 5.1) отделенные решения системы уравнений:
 x1 2 +x2 2 =1
x1 2 +x2 2 =1
Области существования решений:
 ,
, 
Для получения эквивалентной системы из первого уравнения выразим x1

из второго уравнения x2

Определим частные производные:

Проверим условия сходимости в окрестности первого решения, взяв точку в центре области существования этого решения х1=0,1; х2=0,9.

Использовать полученную эквивалентную систему для уточнения первого решения нельзя, т.к. условия сходимости не соблюдаются.
Проверим условия сходимости для этой же эквивалентной системы в окрестности второго решения: х1=0,9; х2=-0,4.


Условия сходимости соблюдаются, следовательно полученную эквивалентную систему можно использовать для уточнения второго решения.
Выполним несколько итераций для уточнения 2-го решения:
Начальные значения k = 0  ;
;  ;
;
Первая итерация k = 1  ;
;

Вторая итерация k = 2  ;
;

Третья итерация k = 3 

Четвертая итерация k = 4 

Итерационный процесс сходиться, для достижения требуемой точности нужно выполнить еще несколько итераций.
После 8-ой итерации х1=0,8956, х2=-0,4446, δ по формуле (5.7) равна 0,0005.
Рассмотрим использование приема Гаусса–Зейделя (5.11) для ускорения итерационного процесса.
Начальные значения k = 0,  ;
;  ;
;
Первая итерация k = 1 ;

Вторая итерация k = 2  ;
;

После 5 итерации получим следующие результаты: х1=0,8957, х2=-0,4449 δ=0,0006.
Для уточнения первого решения нужно найти другую формулу итерационного процесса.
Например, если из первого уравнения выразить х2, а из второго х1 получим:


Проверка условий сходимости в окрестности первого решения показывает, что приведенные формулы можно использовать для уточнения первого решения.
Численные методы решения систем нелинейных уравнений
Введение
Многие прикладные задачи приводят к необходимости нахождения общего решения системы нелинейных уравнений. Общего аналитического решения системы нелинейных уравнений не найдено. Существуют лишь численные методы.
Следует отметить интересный факт о том, что любая система уравнений над действительными числами может быть представлена одним равносильным уравнением, если взять все уравнения в форме  , возвести их в квадрат и сложить.
, возвести их в квадрат и сложить.
Для численного решения применяются итерационные методы последовательных приближений (простой итерации) и метод Ньютона в различных модификациях. Итерационные процессы естественным образом обобщаются на случай системы нелинейных уравнений вида:
 (1)
(1)
Обозначим через  вектор неизвестных и определим вектор-функцию
вектор неизвестных и определим вектор-функцию  Тогда система (1) записывается в виде уравнения:
Тогда система (1) записывается в виде уравнения:
 (2)
(2)
Теперь вернёмся к всеми любимому Python и отметим его первенство среди языков программирования, которые хотят изучать [1].
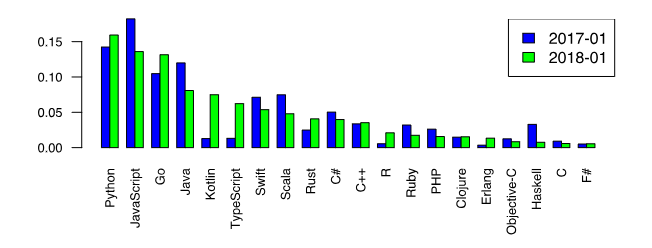
Этот факт является дополнительным стимулом рассмотрения числительных методов именно на Python. Однако, среди любителей Python бытует мнение, что специальные библиотечные функции, такие как scipy.optimize.root, spsolve_trianular, newton_krylov, являются самым лучшим выбором для решения задач численными методами.
С этим трудно не согласится хотя бы потому, что в том числе и разнообразие модулей подняло Python на вершину популярности. Однако, существуют случаи, когда даже при поверхностном рассмотрении использование прямых известных методов без применения специальных функций библиотеки SciPy тоже дают неплохие результаты. Иными словами, новое- это хорошо забытое старое.
Так, в публикации [2], на основании проведенных вычислительных экспериментов, доказано, что библиотечная функция newton_krylov, предназначенная для решения больших систем нелинейных уравнений, имеет в два раза меньшее быстродействие, чем алгоритм TSLS+WD
(two-step least squares), реализованный средствами библиотеки NumPy.
Целью настоящей публикации является сравнение по числу итераций, быстродействию, а главное, по результату решения модельной задачи в виде системы из ста нелинейных алгебраических уравнений при помощи библиотечной функции scipy.optimize.root и методом Ньютона, реализованного средствами библиотеки NumPy.
Возможности решателя scipy.optimize.root для численного решения систем алгебраических нелинейных уравнений
Библиотечная функция scipy.optimize.root выбрана в качестве базы сравнения, потому что имеет обширную библиотеку методов, пригодных для сравнительного анализа.
scipy.optimize.root(fun, x0, args=(), method=’hybr’, jac=None, tol=None,callback=None, ptions=None)
fun — Векторная функция для поиска корня.
x0 –Начальные условия поиска корней
method:
hybr -используется модификация Пауэлл гибридный метод;
lm – решает системы нелинейных уравнений методом наименьших квадратов.
Как следует из документации [3] методы broyden1, broyden2, anderson, linearmixing, diagbroyden, excitingmixing, krylov являются точными методами Ньютона. Остальные параметры являются «не обязательными» и с ними можно ознакомится в документации.
Методы решения систем нелинейных уравнений
Приведенный далее материал действительно можно прочитать в литературе, например в [4], но я уважаю своего читателя и для его удобства приведу вывод метода по возможности в сокращенном виде. Те, кто не любит формулы, этот раздел пропускают.
В методе Ньютона новое приближение для решения системы уравнений (2) определяется из решения системы линейных уравнений:
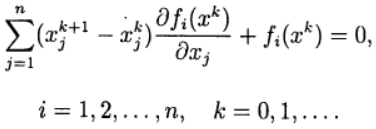 (3)
(3)
Определим матрицу Якоби:
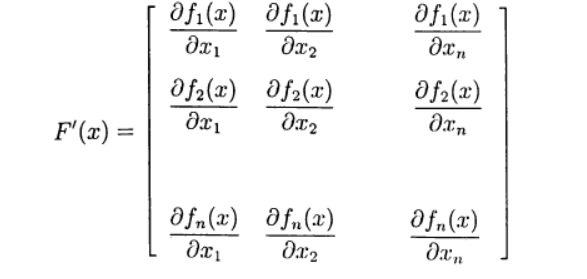 (4)
(4)
Запишем(3) в виде:
 (5)
(5)
Многие одношаговые методы для приближенного решения (2) по аналогии с двухслойными итерационными методами для решения систем линейных алгебраических уравнений можно записать в виде:
 (6)
(6)
где  — итерационные параметры, a
— итерационные параметры, a  — квадратная матрица n х n, имеющая обратную.
— квадратная матрица n х n, имеющая обратную.
При использовании записи (6) метод Ньютона (5) соответствует выбору:

Система линейных уравнений (5) для нахождения нового приближения  может решаться итерационно. В этом случае мы имеем двухступенчатый итерационный процесс с внешними и внутренними итерациями. Например, внешний итерационный процесс может осуществляться по методу Ньютона, а внутренние итерации — на основе итерационного метода Зейделя
может решаться итерационно. В этом случае мы имеем двухступенчатый итерационный процесс с внешними и внутренними итерациями. Например, внешний итерационный процесс может осуществляться по методу Ньютона, а внутренние итерации — на основе итерационного метода Зейделя
При решении систем нелинейных уравнений можно использовать прямые аналоги стандартных итерационных методов, которые применяются для решения систем линейных уравнений. Нелинейный метод Зейделя применительно к решению (2) дает:
 (7)
(7)
В этом случае каждую компоненту нового приближения из решения нелинейного уравнения, можно получить на основе метода простой итерации и метода Ньютона в различных модификациях. Тем самым снова приходим к двухступенчатому итерационному методу, в котором внешние итерации проводятся в соответствии с методом Зейделя, а внутренние — с методом Ньютона.
Основные вычислительные сложности применения метода Ньютона для приближенного решения систем нелинейных уравнений связаны с необходимостью решения линейной системы уравнений с матрицей Якоби на каждой итерации, причем от итерации к итерации эта матрица меняется. В модифицированном методе Ньютона матрица Якоби обращается только один раз:
 (8)
(8)
Выбор модельной функции
Такой выбор не является простой задачей, поскольку при увеличении числа уравнений в системе в соответствии с ростом числа переменных результат решения не должен меняться, поскольку в противном случае невозможно отследить правильность решения системы уравнений при сравнении двух методов. Привожу следующее решение для модельной функции:
Функция f создаёт систему из n нелинейных уравнений, решение которой не зависит от числа уравнений и для каждой из n переменных равно единице.
Программа для тестирования на модельной функции c результатами решения системы алгебраических нелинейных уравнений с помощью библиотечной функции optimize.root для разных методов отыскания корней
Только один из методов, приведенных в документации [3] прошёл тестирование по результату решения модельной функции, это метод ‘krylov’.
Решение для n=100:
Solution:
[1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1.]
Krylov method iteration = 4219
Optimize root time 7.239 seconds:
Вывод: С увеличением числа уравнений вдвое заметно появление ошибок в решении. При дальнейшем увеличении n решение становится не приемлемым, что возможно из-за автоматической адаптации к шагу, эта же причина резкого падения быстродействия. Но это только моё предположение.
Программа для тестирования на модельной функции c результатами решения системы алгебраических нелинейных уравнений с помощью программы написанной на Python 3 с учётом соотношений (1)-(8) для отыскания корней по модифицированному методу Ньютона
Решение для n=100:
Solution:
[1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1.]
Newton iteration = 13
Newton method time 0.496 seconds
Решение для n=200:
Solution:
[1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1.]
Newton iteration = 14
Newton method time 1.869 seconds
Чтобы убедиться в том, что программа действительно решает систему, перепишем модельную функцию для ухода от корня со значением 1 в виде:
Получим:
Solution:
[ 0.96472166 0.87777036 0.48175823 -0.26190496 -0.63693762 0.49232062
-1.31649896 0.6865098 0.89609091 0.98509235]
Newton iteration = 16
Newton method time 0.046 seconds
Вывод: Программа работает и при изменении модельной функции.
Теперь вернёмся к начальной модельной функции и проверим более широкий диапазон для n, например в 2 и 500.
n=2
Solution:
[1. 1.]
Newton iteration = 6
Newton method time 0.048 seconds
n=500
26. Решение систем нелинейных и трансцендентных уравнений
Функция solve может использоваться для решения систем нелинейных и трансцендентных уравнений. Для этого система уравнений и перечень неизвестных задаются в виде множеств. Ниже приведены примеры решения уравнений:
В этих примерах хорошо видна техника работы с функциями solve и assign. В конце примеров показано восстановление неопределенного статуса переменных х и у с помощью функции unassign и снятие определения переменных с помощью заключения их в прямые апострофы.
http://habr.com/ru/post/419453/
http://lib.qrz.ru/node/12288