Урок математики в 9 классе по теме «Геометрическая интерпретация системы двух уравнений с двумя переменными»
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
Урок математики в 9 классе по теме «Геометрическая интерпретация системы двух уравнений с двумя переменными».
18.02.2020 года учитель математики Бахир С.А.
Тип урока: изучение и первичное закрепление новых знаний
v создать условия для закрепления знаний по теме «Системы линейных уравнений с двумя переменными и способы их решения»;
v способствовать получению новых знаний, необходимых при моделировании реальных ситуаций с помощью систем уравнений и знакомству с геометрической интерпретацией систем двух уравнений с двумя переменными; развитию познавательной активности и самостоятельности учащихся;
v создать условия для формирования математической грамотности и культуры мышления.
Применяемые технологии : технология проблемного обучения, технология развития критического мышления.
Организационные формы работы с учащимися:
Оборудование: учебник, тетради, таблицы, схемы графиков, доска.
I. Организационный момент
II. Актуализация знаний
Шринивасана Рамануджан: «Для меня уравнение не имеет никакого смысла, если не выражает мысль Бога».
Ребята, как вы, наверное, уже догадались из этих слов индийского мыслителя, сегодня на уроке мы продолжим с вами работу над уравнениями, а именно над их системами. Вспомним основные методы решения уравнений и познакомимся с новым графическим методом решения систем двух уравнений с двумя переменными.
Учащимся предлагаются таблицы, которые необходимо заполнить по ходу урока. На начальном этапе заполняется графа «З», в которую учащиеся вписывают уже имеющиеся у них знания по теме урока. Например:
Что значит решить систему уравнений;
Способы решения систем уравнений:
способ подстановки и способ сложения;
Алгоритм решения систем двух линейных и нелинейных уравнений с двумя переменными.
III. Проверка домашнего задания:
Решить систему уравнений:
а) способом сложения 
б) способом подстановки 
IV . Изучение нового материала и первичное закрепление знаний
Решим систему уравнений  графическим методом.
графическим методом.
Для этого построим в одной системе координат графики каждого из уравнений системы. Первое уравнение системы равносильно уравнению у =  , графиком которого является гипербола, проходящая через точки (1;1), (0,5;2) (смотрите рисунок 68 на с. 157 учебника).
, графиком которого является гипербола, проходящая через точки (1;1), (0,5;2) (смотрите рисунок 68 на с. 157 учебника).
Графиком второго уравнения системы  является парабола с вершиной в точке (1;1), пересекающая ось ординат в точке (0;2). По графикам на рисунке видно, что единственной точкой пересечения параболы и гиперболы является точка(1;1). Данная пара чисел является решением системы двух уравнений с двумя переменными, а полученное нами изображение – геометрической интерпретацией решения этой системы.
является парабола с вершиной в точке (1;1), пересекающая ось ординат в точке (0;2). По графикам на рисунке видно, что единственной точкой пересечения параболы и гиперболы является точка(1;1). Данная пара чисел является решением системы двух уравнений с двумя переменными, а полученное нами изображение – геометрической интерпретацией решения этой системы.
Обратите внимание на доску. Здесь мы видим два изображения (рис.3 и рис.4), на которых изображены графики конкретных функций, соответствующих определенным системам уравнений с двумя переменными. Давайте попробуем решить эти системы. (Самостоятельная работа учащихся с последующим объяснением алгоритма решения у доски).
Укажите с помощью изображенных графиков системы уравнений:
1) имеющие два решения,
2) имеющие одно решение,
3) не имеющие решений.
VI .Моделирование реальных процессов с использованием систем уравнений с двумя переменными.
Системы уравнений с двумя переменными помогают нам в моделировании реальных процессов. Обратимся вновь к учебнику и разберем задачу № 2 на с. 162. Из поселка А в поселок В вышел пешеход. Одновременно с ним из поселка В в поселок А выехал велосипедист. Через 50 минут они встретились. Сколько времени потребовалось бы пешеходу для того, чтобы пройти весь путь из А в В, если известно, что велосипедист проделал бы тот же путь на 4 часа быстрее пешехода?
Для решения задачи составим таблицу зависимостей между величинами.
Системы алгебраических уравнений в математике с примерами решения и образцами выполнения
Целые рациональные функции от нескольких переменных: В этой главе мы изучим системы уравнений от нескольких переменных. В основном мы будем рассматривать системы алгебраических уравнений, то есть уравнений, обе части которых являются целыми рациональными функциями от неизвестных. Понятие целой рациональной функции от нескольких переменных определяется точно так же, как и в случае одного переменного; исходным, как и тогда, будет служить понятие целого рационального выражения.
Алгебраическое выражение, получающееся из чисел и букв x, у, … , z с помощью операций сложения и умножения, называется целым рациональным выражением от х, у, …, z. Примерами целых рациональных выражений являются:

Как и в случае выражений от одного переменного, каждое целое рациональное выражение от нескольких переменных можно привести к каноническому виду. Речь идет о суммах одночленов, то есть о выражениях вида  где буквы х, у,……., z стоят в определенном порядке. Такие суммы мы будем называть многочленами от х, у , …, z. Например, многочленами являются
где буквы х, у,……., z стоят в определенном порядке. Такие суммы мы будем называть многочленами от х, у , …, z. Например, многочленами являются

Правила действия над многочленами вытекают из основных законов алгебры.

Системы уравнений
Рассмотрим некоторые общие вопросы теории систем уравнений. Для простоты ограничимся системами уравнений с двумя неизвестными, хотя основные результаты применимы и к системам уравнений с большим числом неизвестных.
Рассмотрим систему уравнений

Она выражает следующую задачу: найти все пары чисел (а, b) такие, что

Пары чисел (а, b), обладающие этим свойством, называют решениями системы (1). Если множество решений системы пусто, то система называется несовместной.
Тот факт, что пара (а, Ь) является решением системы уравнений с неизвестными х и у, записывается обычно в виде:

Например, пара чисел  является решением системы уравнений
является решением системы уравнений
Помимо решения  эта система имеет еще решения
эта система имеет еще решения

Позже мы увидим, что иных решений она не имеет.
Геометрический смысл решений уравнений и систем уравнений с двумя неизвестными
Возьмем любое уравнение относительно х и у:

и рассмотрим все точки М (х, у) некоторой плоскости, координаты которых удовлетворяют этому уравнению. Эти точки образуют не которое множество Г, и мы будем говорить, что уравнение (1) задает (или выражает) это множество. Обычно множество Г является некоторой линией. В этом случае уравнение (1) называют уравнением линии Г.
Чтобы найти точки линии  имеющие абсциссу а, надо подставить в уравнение вместо х значение а. Мы получим уравнение с одним неизвестным:
имеющие абсциссу а, надо подставить в уравнение вместо х значение а. Мы получим уравнение с одним неизвестным:

Может случиться, что это уравнение не имеет ни одного действительного корня. Тогда на линии нет точек с абсциссой х = а. Если же уравнение (2) имеет один или несколько корней, то каждому корню соответствует точка линии, имеющая абсциссу а.
Для некоторых уравнений на плоскости нет ни одной точки, координаты которых удовлетворяли бы этим уравнениям. Примером может служить

Ведь если х и у — действительные числа, то  а потому
а потому  Другим уравнениям соответствует лишь одна точка на плоскости. Например, возьмем уравнение
Другим уравнениям соответствует лишь одна точка на плоскости. Например, возьмем уравнение

Так как  то это уравнение может удовлетворяться лишь в случае, когда х = 3 и у = 4. Иными словами, уравнение (3) задает на плоскости одну точку М (3, 4).
то это уравнение может удовлетворяться лишь в случае, когда х = 3 и у = 4. Иными словами, уравнение (3) задает на плоскости одну точку М (3, 4).
Однако такие случаи являются в некотором смысле исключи тельными, и мы ограничимся рассмотрением случаев, когда уравнение  задает некоторую линию.
задает некоторую линию.
Перейдем теперь к выяснению геометрического смысла решений систем уравнений с двумя неизвестными. Возьмем такую систему:

Каждому из этих уравнений соответствует линия, координаты всех точек которой (и только этих точек!) удовлетворяют этому уравнению. Мы же ищем точки М (.х, у), координаты которых удовлетворяют обоим уравнениям. Ясно, что эти точки принадлежат обеим линиям, то есть являются точками их пересечения.
Итак, задача о решении системы уравнений равносильна зада че об отыскании точек пересечения соответствующих линий. Каждой точке пересечения линий соответствует решение системы.
Совокупность уравнений

образуют совокупность, если требуется найти все пары чисел х = а, у = b, удовлетворяющие хотя бы одному из уравнений (1). Все такие пары чисел (а, Ь) будем называть решениями совокупности (1). Геометрически решения совокупности (1) изображаются фигурой, образованной объединением всех кривых

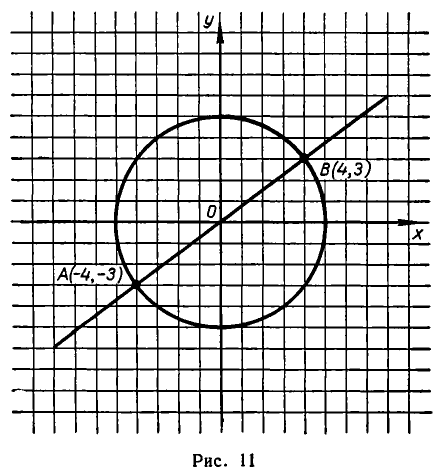
Например, возьмем уравнения  Первое из них является уравнением прямой, а второе — уравнением окружности (см. рис. 11). Если рассматривать эти два уравнения как систему
Первое из них является уравнением прямой, а второе — уравнением окружности (см. рис. 11). Если рассматривать эти два уравнения как систему
то решения будут изображаться точками пересечения прямой и окружности (то есть точками Л и В на рис. 11). Если же рассматривать эти уравнения как совокупность уравнений
то решение этой совокупности изображаются геометрической фигурой, получаемой объединением прямой и окружности.
Чтобы различать системы уравнений и совокупности уравнений, мы и стали обозначать систему уравнений так:
а совокупность уравнений так:
Можно говорить и о таком более сложном понятии, как совокупность систем уравнений. Например, возьмем такую запись:
Она означает, что надо найти решения системы уравнений
и найти решения системы уравнений
и объединить найденные решения.
Геометрически это изображается так: надо найти точки пересечения линий  и точки пересечения линий
и точки пересечения линий  и
и  и объединить найденные точки в одно множество. Иными словами, если
и объединить найденные точки в одно множество. Иными словами, если  — множество точек плоскости, координаты которых удовлетворяют уравнению
— множество точек плоскости, координаты которых удовлетворяют уравнению  — множество точек плоскости, удовлетворяющих уравнению
— множество точек плоскости, удовлетворяющих уравнению  то решения совокупности систем (2) образуют множество
то решения совокупности систем (2) образуют множество

Равносильные системы уравнений
Две системы уравнений


называются равносильными, если всякое решение первой системы является решением второй, а всякое решение второй системы является решением первой.
В частности, любые две несовместные системы уравнений равносильны.
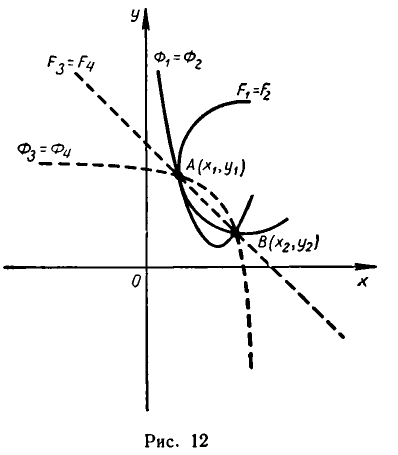
Геометрически это означает следующее: линии  и пересекаются в тех же самых точках, что и кривые
и пересекаются в тех же самых точках, что и кривые 
 (см. рис. 12).
(см. рис. 12).
Процесс решения системы уравнений заключается в том, что ее последовательно заменяют равносильными ей системами уравнений (или совокупностями систем уравнений) до тех пор, пока не придут к совокупности вида:
Эта совокупность и дает решения заданной системы уравнений.
При решении систем уравнений чаще всего используются следующие теоремы о равносильности.
Теорема:

заменить любое из уравнений равносильным ему уравнением, то получим систему, равносильную первоначальной.
Доказательство:
Пусть  равносильно уравнению
равносильно уравнению  Обозначим через А множество решений уравнения
Обозначим через А множество решений уравнения  через А* — множество решений уравнения
через А* — множество решений уравнения  а через В — множество решений уравнения
а через В — множество решений уравнения 
 Тогда множеством решений системы (4) является пересечение
Тогда множеством решений системы (4) является пересечение  а множеством решений системы
а множеством решений системы

является пересечение  Поскольку уравнения
Поскольку уравнения  и
и  равносильны, то
равносильны, то 
а значит, и  то есть системы (4) и (4′) равносильны. Теорема доказана.
то есть системы (4) и (4′) равносильны. Теорема доказана.
Из этой теоремы вытекает такое
Следствие:
Каждая система уравнений
равносильна некоторой системе уравнений вида
В самом деле, уравнение  равносильно уравнению
равносильно уравнению  а уравнение
а уравнение  уравнению
уравнению 
Теорема:
Если функции  определены на некотором множестве М, то на этом множестве уравнение
определены на некотором множестве М, то на этом множестве уравнение

равносильно совокупности уравнений
Доказательство:
Если  — решение уравнения (5), то имеет место равенство
— решение уравнения (5), то имеет место равенство

Но произведение нескольких чисел может равняться нулю тогда и только тогда, когда равен нулю хотя бы один из сомножителей. Поэтому для некоторого  имеем:
имеем:  и, значит
и, значит  одно из решений совокупности (6).
одно из решений совокупности (6).
Обратно, если  — одно из решений совокупности (6), то по крайней мере для одного k имеем
— одно из решений совокупности (6), то по крайней мере для одного k имеем  а тогда выполняется равенство (5′), и поэтому
а тогда выполняется равенство (5′), и поэтому  — одно из решений уравнения (5).
— одно из решений уравнения (5).
Из теоремы 2 вытекает.
Следствие:

равносильна совокупности систем уравнений
Например, система уравнений
равносильна совокупности систем
Это следствие позволяет сводить системы к совокупностям более простых систем
Метод подстановки
Теоремы п. 5 относятся по сути дела к отдельным уравнениям, а не к системе в целом. При решении систем уравнений применяются также преобразования уравнений, затрагивающие не одно уравнение, а несколько. Например, для решения системы
мы находим из первого уравнения выражение у через 
 и подставляем это выражение во второе уравнение. Решая полученное уравнение
и подставляем это выражение во второе уравнение. Решая полученное уравнение  находим корни
находим корни  Так как
Так как  то оба соответствующих значения неизвестного у равны 6. Значит, решение системы можно записать в виде:
то оба соответствующих значения неизвестного у равны 6. Значит, решение системы можно записать в виде:
Метод, которым была решена эта система, называется методом подстановки. Он позволяет сводить решение системы уравнений с двумя неизвестными к более простой задаче — решению одного уравнения с одним неизвестным. Выясним теперь, на чем же основан метод подстановки. Для этого докажем следующую теорему.
Теорема:

равносильна системе уравнений

Доказательство:
Пусть  — решение системы уравнений (1). Тогда b = f (а) и Ф (а, b)=0. Поэтому Ф (а, f(а)) = 0. Равенства b= f(а) и
— решение системы уравнений (1). Тогда b = f (а) и Ф (а, b)=0. Поэтому Ф (а, f(а)) = 0. Равенства b= f(а) и  показывают, что
показывают, что  является решением системы уравнений (2).
является решением системы уравнений (2).
Обратно, пусть  — решение системы уравнений (2). Тогда имеют место равенства
— решение системы уравнений (2). Тогда имеют место равенства  Из них вытекает, что
Из них вытекает, что  А это и означает, что
А это и означает, что  является решением системы уравнений (1).
является решением системы уравнений (1).
Тем самым равносильность систем уравнений (1) и (2) доказана.
Из теорем 2 и 3 вытекает
Следствие:
Если уравнение F (х, у)=0 равносильно уравнению  , то система уравнений
, то система уравнений
равносильна системе уравнений
Мы уже говорили, что теорема 3 лежит в основе метода решения систем уравнений с двумя неизвестными, называемого методом исключения неизвестных. Он состоит в следующем.
Пусть задана система уравнений

Выразим из первого уравнения системы у через х, то есть заменим уравнение F(х, у)= 0 равносильным ему уравнением у = f(х). Полученное выражение для у подставим во второе уравнение, то есть заменим систему уравнений (1) равносильной ей системой

Уравнение Ф (х,f(x)) является уже уравнением с одним неизвестным. Решая его, получим корни  . Им соответствуют значения
. Им соответствуют значения  неизвестного у. В соответствии с этим получаем решения
неизвестного у. В соответствии с этим получаем решения

Часто приходится заменять уравнение F(х,у)= 0 не одним уравнением вида у = f(х), а совокупностью
таких уравнений. Тогда и система (1) заменяется совокупностью систем
Из каждой системы этой совокупности получаем описанным выше методом решения заданной системы, после чего объединяем их.
Примеры:
- Решить систему уравнений:
Из первого уравнения системы находим  . Подставляя это значение во второе уравнение, получаем:
. Подставляя это значение во второе уравнение, получаем:

или, после упрощения,

Корнями этого биквадратного уравнения являются числа:

Им соответствуют значения:

Значит, решения заданной системы уравнений имеют вид:

2. Решить систему уравнений:
Из первого уравнения системы получаем:

Значит, нам надо решить совокупность двух систем уравнений:
Делая в первой системе подстановку, получаем:

или  Решая (возведением в квадрат) это иррациональное уравнение, находим корни
Решая (возведением в квадрат) это иррациональное уравнение, находим корни  Им соответствуют значения
Им соответствуют значения  Итак, первая система имеет решения
Итак, первая система имеет решения
Точно так же доказывается, что вторая система имеет решения:
Следовательно, заданная система имеет решения:

Метод алгебраического сложения уравнений
Кроме метода подстановки, при решении систем алгебраических уравнений применяется метод алгебраического сложения. Он основан на следующей теореме.
Теорема:
Если к одному из уравнений системы

прибавить другое уравнение, умноженное на любой множитель f(x, y), определенный при всех допустимых значениях неизвестных, а второе уравнение оставим неизменным, то получится система уравнений, равносильная исходной.
Таким образом, система (1) равносильна системе

где множитель f(х,у) определен при всех допустимых значениях неизвестных.
Доказательство:
Пусть х = а, у = b — решение системы (1), то есть F(а, b)=0 и Ф(а, b)= 0.
Умножим обе части равенства Ф(а, b)=0 на число f(а, b) и прибавим к равенству F (а, b)= 0. Мы получим, что F(а, b)+(а, b) Ф(а,b)= 0, а потому х =а, у = b удовлетворяет и системе (2).
Точно так же доказывается, что любое решение системы уравнений (2) удовлетворяет системе уравнений (1). Значит, системы уравнений (1) и (2) равносильны.
Из теоремы 4 вытекает такое
Следствие:
Если к одному из уравнений системы (1) прибавить другое уравнение системы, умноженное на любое число, а второе уравнение оставить неизменным, то получим систему, равносильную первоначальной.
Покажем, как применяются эти утверждения для решения систем уравнений. Пусть дана система уравнений:
Здесь нецелесообразно выражать х через у или у через х, так как мы получили бы довольно сложное иррациональное уравнение. Поэтому поступим иначе. Прибавим к первому уравнению системы второе уравнение, умноженное на 3. В силу формулы для куба суммы получим систему уравнений:
равносильную заданной. Эта система равносильна системе:
(поскольку уравнение  равносильно х + у = 3).
равносильно х + у = 3).
А теперь выразим из первого уравнения у через х и подставим во второе уравнение. Мы получим:
Из второго уравнения находим:  Соответствующие значения у равны
Соответствующие значения у равны  Значит, решениями заданной системы уравнений являются:
Значит, решениями заданной системы уравнений являются:
Задача:
Массы трех планет  равны соответственно М, 2М, ЗM. Через планеты проведена плоскость и на ней выбрана
равны соответственно М, 2М, ЗM. Через планеты проведена плоскость и на ней выбрана
система координат. Координаты планет равны соответственно A(0,0), В (а, 0), С (2а, b). При каком значении b на плоскости существует точка, в которой притяжение ко всем трем планетам одинаково?
Решение:
По закону всемирного тяготения сила притяжения между телами с массами  равна
равна  , где у — гравитационная постоянная, а r — расстояние между этими телами. Если D(х, у) — некоторая точка плоскости, то ее расстояние до точки А равно
, где у — гравитационная постоянная, а r — расстояние между этими телами. Если D(х, у) — некоторая точка плоскости, то ее расстояние до точки А равно  до точки В (2а, 0) равно
до точки В (2а, 0) равно

а до точки С (b, с) равно

Поэтому силы, с которыми тело массы m, находящееся в точке D, притягивается к планетам, равны
По условию задачи должны выполняться условия 
 или, иначе,
или, иначе,
После сокращения обоих уравнений на  и освобождения от знаменателей получаем равносильную систему уравнений
и освобождения от знаменателей получаем равносильную систему уравнений

Вычтем первое уравнение из второго. Мы получим, что
Подставляя это значение у в первое уравнение, получаем для х квадратное уравнение

Из него находим:
Отсюда получаем, что х принимает действительные значения лишь в случае, когда  то есть при
то есть при  Если
Если  то искомой точкой является
то искомой точкой является  а если
а если  то
то 
Метод введения новых неизвестных
Для решения многих систем оказывается удобно ввести вместо х и у новые неизвестные. Рассмотрим следующий пример:
Если положить  то получим для определения t и s систему уравнений:
то получим для определения t и s систему уравнений:
Решая эту систему, получаем, что

Так как  то для отыскания х и у получаем две системы уравнений:
то для отыскания х и у получаем две системы уравнений:

Решениями первой системы являются:
Вторая же система не имеет действительных решений.
Общего правила для выбора новых неизвестных не существует. Однако в некоторых случаях можно указать полезные правила.
Системы однородных уравнений
Назовем f (х, у) однородным многочленом относительно х и у степени n, если при замене х на ах и у на ау F (х, у) умножается на 

Например,  — однородный многочлен второй степени, а
— однородный многочлен второй степени, а  — однородный многочлен четвертой степени.
— однородный многочлен четвертой степени.
Пусть одно из уравнений системы имеет вид: F (х,у) = 0, где F (х, у)— однородный многочлен. Тогда решение системы сводится к решению двух уравнений, каждое из которых содержит лишь одно неизвестное. Покажем на примере, как это делается.
Пусть дана система уравнений:

Посмотрим сначала, есть ли у этого уравнения решения, для которых х =0. Подставляя х = 0 в оба уравнения системы, получаем систему уравнений:
Эта система несовместна, так как из первого уравнения получаем у = 0, а из второго —
Итак, система не имеет решений, для которых х = 0. Поэтому первое уравнение системы можно разделить на  (в общем случае— на
(в общем случае— на  где n — степень многочлена F (х, у)). Мы получим уравнение:
где n — степень многочлена F (х, у)). Мы получим уравнение:
Положим у — tх. Мы придем к системе уравнений:
Корнями первого уравнения являются  Подставляя во второе уравнение
Подставляя во второе уравнение  получаем
получаем  Подставляя же
Подставляя же  получаем х = ± 1. Так как у=tх, то мы имеем следующие решения системы (1):
получаем х = ± 1. Так как у=tх, то мы имеем следующие решения системы (1):

В следующем примере система имеет решения, для которых х = 0:
При х = 0 первое уравнение обращается в равенство 0=0, а второе принимает вид  Из него находим
Из него находим  Мы нашли уже два решения системы:
Мы нашли уже два решения системы:

Другие решения получаются так же, как и в первом случае. Мы делим первое уравнение системы на  (случай, когда х = 0 и деление невозможно, уже рассмотрен) и заменяем у на tх. Получаем систему уравнений:
(случай, когда х = 0 и деление невозможно, уже рассмотрен) и заменяем у на tх. Получаем систему уравнений:
Из первого уравнения находим  Подставляя эти решения во второе уравнение и находя х, приходим к следующим решениям системы:
Подставляя эти решения во второе уравнение и находя х, приходим к следующим решениям системы:

Задача:
От пристани А одновременно отправились вниз по течению катер и плот. Катер спустился вниз по течению на 96 км, затем повернул обратно и вернулся в А через 14 часов. Найти скорость катера в стоячей воде, если известно, что катер встретил плот на обратном пути на расстоянии 24 км от А.
Решение:
Сначала составим систему уравнений. В качестве неизвестных выберем скорость u катера в стоячей воде и скорость течения v. Тогда скорость катера при движении по течению равна u+v, а при движении против течения u-v. Значит, чтобы пройти вниз по течению 96 км, ему надо  часов, а вверх по течению
часов, а вверх по течению  часов. Всего он затратит
часов. Всего он затратит  часов. Но по условию задачи он вернулся назад через 14 часов. Значит,
часов. Но по условию задачи он вернулся назад через 14 часов. Значит,
Чтобы получить второе уравнение, найдем, какое время затратил катер до встречи с плотом. Он прошел 96 км вниз по течению и 72 км против течения. На это он затратил  часов. Плот же проплыл 24 км со скоростью v и затратил
часов. Плот же проплыл 24 км со скоростью v и затратил  часов. Так как плот и катер одновременно отправились из А , то имеем уравнение
часов. Так как плот и катер одновременно отправились из А , то имеем уравнение

Мы получим систему уравнений:
При замене u на ut и v на vt обе части второго уравнения умножаются на  . Поэтому оно является однородным уравнением степени однородности — 1. Так как v = 0 не удовлетворяет уравнению, мы можем положить u = uz. Тогда второе уравнение примет вид:
. Поэтому оно является однородным уравнением степени однородности — 1. Так как v = 0 не удовлетворяет уравнению, мы можем положить u = uz. Тогда второе уравнение примет вид:
Освобождаясь от знаменателей, получим:

Так как  Следовательно, u =7v. Подставляя u =7v в первое уравнение системы, находим:
Следовательно, u =7v. Подставляя u =7v в первое уравнение системы, находим:
откуда v = 2 (км/ч). Поэтому u = 14 км/ч.
Геометрическая интерпретация решения систем двух уравнений с двумя неизвестными
Мы уже знаем, что решение системы двух уравнений с двумя неизвестными
геометрически истолковывается как отыскание точек пересечения двух линий. Этим можно воспользоваться для приближенного решения системы уравнений. Именно, если изобразить линии F(х, у) = 0 и Ф(х, у) = 0, мы сможем найти координаты точек пересечения этих линий и тем самым значения неизвестных. Поскольку линии чертятся лишь приближенно, мы получаем не точные, а приближенные значения решений системы. Тем не менее, решая графически систему, мы можем узнать, сколько она имеет решений, и, хотя бы грубо, найти приближенные значения этих решений.
При графическом решении систем уравнений мы сталкиваемся с различными кривыми. В курсе геометрии были выведены уравнения прямой, окружности, параболы, гиперболы и эллипса. В дальнейшем мы будем пользоваться этими кривыми.
Рассмотрим некоторые примеры систем уравнений.
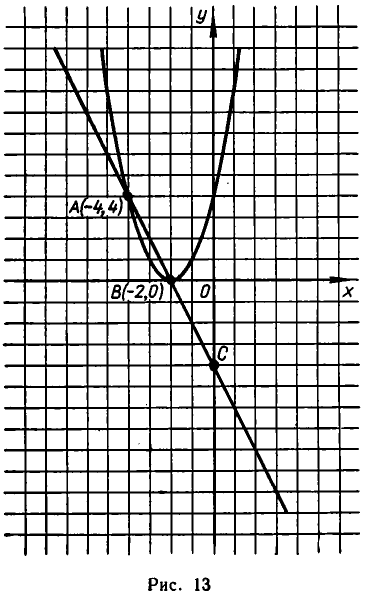
Пусть дана система

Выразив из уравнения (2) у через х и подставив в первое уравнение, получаем квадратное уравнение:


Подставив их во второе уравнение, получаем:

Итак, система имеет два решения:
Построим теперь линии, выражаемые уравнениями (1) и (2). Уравнение (1) — это уравнение параболы  которая получается из параболы у =
которая получается из параболы у =  сдвигом на 2 единицы влево вдоль оси абсциссы. Уравнение же (2) выражает прямую линию у=-2х- 4. Рис. 13 дает геометрическое изображение нашей системы. Мы видим из рисунка, что парабола и прямая пересекаются в двух точках А (—4, 4) и
сдвигом на 2 единицы влево вдоль оси абсциссы. Уравнение же (2) выражает прямую линию у=-2х- 4. Рис. 13 дает геометрическое изображение нашей системы. Мы видим из рисунка, что парабола и прямая пересекаются в двух точках А (—4, 4) и  в соответствии с полученным аналитическим путем решением.
в соответствии с полученным аналитическим путем решением.
Парабола может иметь с прямой линией не две, а одну точку пересечения и даже не иметь ни одной точки пересечения.
Возьмем систему уравнений:
Ее единственное решение:
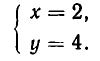
Из рис. 14 мы видим, что прямая у = 2х касается параболы


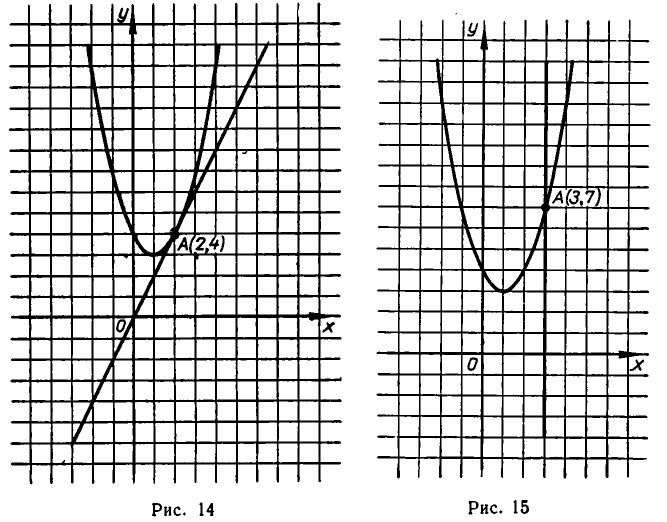
тоже имеет одно решение:
Но в этом случае прямая не касается параболы, а пересекает ее (см. рис. 15).

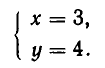
не имеет ни одного решения — здесь прямая и парабола не пересекаются (см. рис. 16).
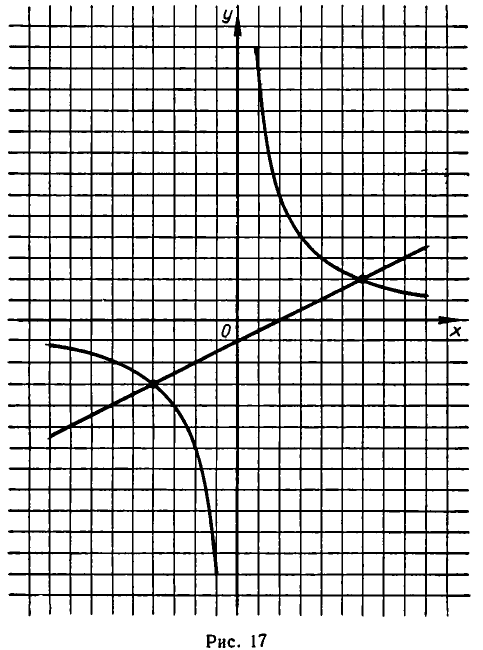
Теперь рассмотрим систему, геометрический смысл которой заключается в отыскании точек пересечения прямой и гиперболы. Пусть система имеет вид:
Решая ее способом подстановки, находим решения:
Эти же решения получаются графическим способом (см. рис. 17). Однако следует иметь в виду, что графический способ дает лишь приближенные значения корней и, решая систему (6) графически, мы не можем быть уверены, что решение имеет вид х = —4, у = —3, а не, например, х = —4,01, у = —2,99.
Как и в случае параболы, может случиться, что прямая имеет не две, а меньше общих точек с гиперболой.
Перейдем к системам, в которых оба уравнения имеют вторую степень. Можно доказать, что такие системы уравнений имеют не более четырех решений.
Вообще можно доказать, что система двух уравнений с двумя неизвестными такая, что первое уравнение имеет степень m, а второе — степень n, имеет не более mn решений.
Рассмотрим, например, систему:

Первое из этих уравнений представляет параболу с осью, параллельной оси ординат, а второе — параболу с осью, параллельной оси абсцисс (см. рис. 18). Из рисунка видно, что эти параболы пересекаются в четырех точках. Чтобы найти координаты точек пересечения,
решим эту систему методом алгебраического сложения. Именно, вычтем из уравнения (8) уравнение (7). Мы получим равносильную систему уравнений:
Эта система равносильна совокупности систем:
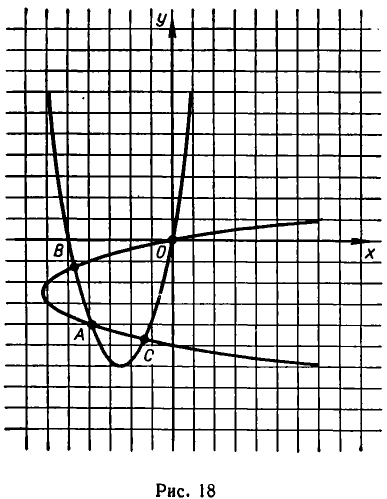
Обе системы этой совокупности решаются методом подстановки. Мы получаем при этом следующие решения заданной системы:
тоже имеет четыре решения. Она выражает задачу об отыскании точек пересечения окружности и гиперболы (см. рис. 19). Что бы решить эту систему, надо прибавить к первому уравнению удвоенное второе уравнение.
В некоторых случаях получается меньше чем четыре решения системы. Например, система
имеет два решения. Она выражает задачу об отыскании точек пересечения параболы и окружности (рис. 20).
Столько же решений имеет система

(пересечение двух окружностей) (рис. 21).
Решение других типов систем алгебраических систем уравнений
Пример:
Решить систему уравнений


Решение:
Из данной системы можно исключить  , сложив уравнение (1), умноженное на
, сложив уравнение (1), умноженное на  , с уравнением (2), умноженным на
, с уравнением (2), умноженным на  . В результате получим квадратное относительно
. В результате получим квадратное относительно  уравнение
уравнение


откуда  и
и 
Система (1), (2), равносильная системе (1), (3), распадается на две системы:

Из первой системы находим 

Из второй системы получаем 
Ответ. 
Пример:
Решить систему уравнений

Решение:
Если  то из данной системы получаем, что
то из данной системы получаем, что  т.е.
т.е.  — решение системы.
— решение системы.
Пусть  тогда разделив уравнения почленно, находим
тогда разделив уравнения почленно, находим

где  Уравнение
Уравнение


имеет корни 
Заметим, что при  уравнение (6) вместе с уравнением (4) образует систему, равносильную исходной. 2 2
уравнение (6) вместе с уравнением (4) образует систему, равносильную исходной. 2 2
Если  т. е.
т. е.  то из уравнения (4) с учетом условия
то из уравнения (4) с учетом условия  получаем
получаем  и поэтому
и поэтому 
Если  то
то 
Ответ. 
Пример:
Решить систему уравнений

Решение:
Допустимые значения  и
и  определяются условием
определяются условием  а произведение правых частей уравнения равно
а произведение правых частей уравнения равно  Перемножив уравнения (7) и (8), получим
Перемножив уравнения (7) и (8), получим  или
или


Так как обе части уравнений (7) и (8) отличны от нуля, то система (9), (7) равносильна системе (7), (8). Исключая у из системы (9), (7), получаем


Из (10) следует, что  а из (9) — что
а из (9) — что 

Ответ. 
Пример:
Решить систему уравнений

Решение:
Запишем первое уравнение в виде 
Решив это уравнение как квадратное относительно , получим

Таким образом, исходная система распадается на следующие две системы:

Пример:
Решить систему уравнений

Решение:
Исключив из системы, получим уравнение

нахождение корней которого — совсем не простая задача. Более эффективный способ основан на разложении левой части уравнения (12) на множители:

Отсюда вытекает, что система (11), (12) распадается на следующие две системы:
Первая из этих систем не имеет действительных решений, а вторая имеет два решения.
Ответ. 
Этот материал взят со страницы решения задач с примерами по всем темам предмета математика:
Возможно вам будут полезны эти страницы:
Решение системы алгебраических уравнений по правилу Крамера и методом обратной матрицы
Пусть дана система линейных уравнений, состоящая из n
линейных уравнений с n неизвестными:

Здесь  — n неизвестных,
— n неизвестных,  —
—
циенты при неизвестных,  — свободные члены.
— свободные члены.
Определитель, состоящий из коэффициентов при неизвестных,
называется определителем системы.
Для рассматриваемого случая определитель системы имеет вид
Предположим, что этот определитель отличен от нуля. Пусть i —
любое число от 1 до n . Умножим обе части первого равенства
системы уравнений (2.1) на алгебраическое дополнение 
получающееся вычеркиванием первой строки и i-го столбца в определителе системы. Обе части второго равенства этой системы умножим на алгебраическое дополнение  получающееся вычеркиванием второй строки и i-го столбца в определителе системы, и т.д. В результате получим систему:
получающееся вычеркиванием второй строки и i-го столбца в определителе системы, и т.д. В результате получим систему:
Сложим левые и правые части получившейся системы
уравнений, скомпоновав их следующим образом:
Коэффициентом при  в этом равенстве является определитель
в этом равенстве является определитель
системы D. При всех остальных х коэффициенты будут равны нулю,
так как они являются суммой произведений всех элементов столбцов
определителя на алгебраические дополнения соответствующих
элементов другого столбца (п. 5 свойств определителей, § 1.9). Правая
часть равенства является определителем, полученным из
определителя системы D после замены в нем i-го столбца столбцом из
свободных членов системы уравнений. Обозначим этот определитель  Таким образом, полученное равенство можно записать в виде
Таким образом, полученное равенство можно записать в виде

Так как  то
то

Этот метод решения системы линейных уравнений называется
правилом Крамера.
Правило Крамера. Пусть D — определитель системы п линейных
уравнений, состоящий из коэффициентов при неизвестных, a  — определитель, полученный путем замены в определителе системы i-го столбца столбцом из свободных членов системы уравнений. Тогда, если то система имеет единственное решение, определяемое по формуле
— определитель, полученный путем замены в определителе системы i-го столбца столбцом из свободных членов системы уравнений. Тогда, если то система имеет единственное решение, определяемое по формуле

Пример:
Решить систему линейных уравнений:
Решение:
Определитель этой системы отличен от нуля:
После замены в этом определителе соответствующих столбцов
столбцом свободных членов получим
Решение системы уравнений:

Решить систему линейных уравнений можно, используя матричный метод. Для этих целей коэффициенты данной системы, неизвестные и свободные члены представим в виде матриц:
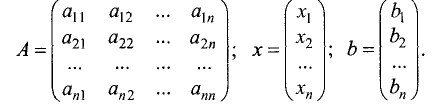
Тогда система линейньк уравнений в матричной форме имеет вид
Умножим слева эту матрицу на 
Преобразуем левую часть равенства:

Таким образом, решение в матричной форме можно записать в виде

Пример:
Решить систему линейных уравнений:
Решение:
Определитель данной системы
Обратную матрицу находим по схеме, приведенной в § 1.11:
Находим матрицу решений:
Таким образом, система имеет следующее решение:

Общий вид системы линейных алгебраических уравнений
Систему из m линейных уравнений с n неизвестными, или систему m х n, можно записать в общем виде следующим образом:
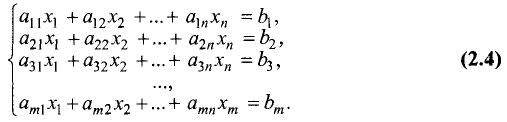
Если так же, как и в предыдущем разделе, ввести обозначения
то система линейных уравнений в матричной форме и ее решение
примут вид
Решение системы линейных алгебраических уравнений методом Гаусса
Метод Гаусса состоит в последовательном исключении переменных. При этом на первом шаге из второго уравнения исключается  , на втором шаге из третьего уравнения исключается
, на втором шаге из третьего уравнения исключается  и т. д.
и т. д.
Шаг 1. Предположим, что коэффициент при в первом
уравнении системы (2.4)  . Если это не так, то перестановкой
. Если это не так, то перестановкой
уравнений местами добьемся того, что  . Перепишем систему (2.4), изменив все уравнения, кроме первого, по следующему алгоритму. Умножим первое уравнение на
. Перепишем систему (2.4), изменив все уравнения, кроме первого, по следующему алгоритму. Умножим первое уравнение на  сложим со вторым уравнением системы (2.4) и результат запишем в виде второго уравнения системы (2.5):
сложим со вторым уравнением системы (2.4) и результат запишем в виде второго уравнения системы (2.5):
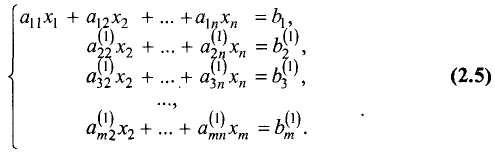
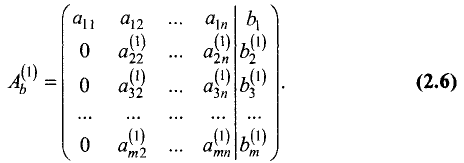
Умножим первое уравнение на  сложим с третьим уравнением системы (2.4) и результат запишем в виде третьего уравнения системы (2.5). Аналогично поступаем с остальными уравнениями системы. Буквами с верхним индексом (1) обозначены новые коэффициенты, полученные после первого шага.
сложим с третьим уравнением системы (2.4) и результат запишем в виде третьего уравнения системы (2.5). Аналогично поступаем с остальными уравнениями системы. Буквами с верхним индексом (1) обозначены новые коэффициенты, полученные после первого шага.
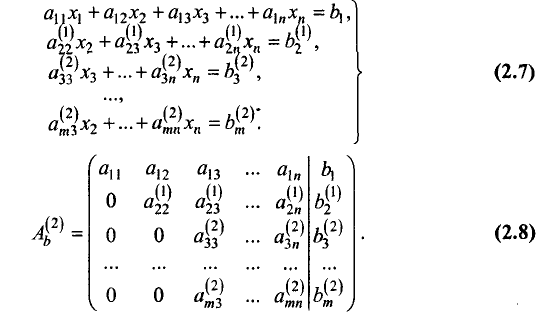
Для удобства записи обычно используют расширенную матрицу системы, отделяя в ней вертикальной чертой столбец свободных членов. После первого шага данная матрица принимает вид:
Шаг 2. Предположим, что коэффициент при во втором
уравнении системы (2.5)  Если это не так, то перестановкой
Если это не так, то перестановкой
уравнений местами добьемся того, что . Первое и второе уравнения системы (2.5) перепишем в систему (2.7). Умножим второе уравнение системы (2.5) или матрицы (2.6) на  сложим с
сложим с
третьим уравнением системы (2.5) или матрицы (2.6) и результат
запишем в виде третьего уравнения системы (2.7) или матрицы
(2.8). Аналогично поступаем с остальными уравнениями системы:
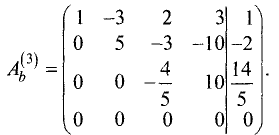
Продолжая процесс последовательного исключения переменных, после (r-1)-го шага получим систему уравнений и расширенную матрицу:
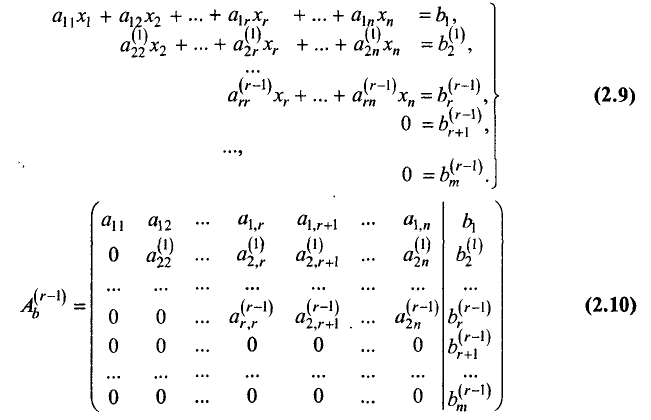
Последние m-r уравнений в системе (2.9) для совместной
системы (2.4) являются тождествами:  Если хотя бы одно из
Если хотя бы одно из
чисел 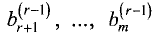 не равно нулю, то соответствующее равенство противоречиво, и система (2.4) несовместна. В совместной системе при ее решении последние m-r уравнений (2.9) и (2.10) можно не принимать во внимание. Тогда система уравнений (2.9) и
не равно нулю, то соответствующее равенство противоречиво, и система (2.4) несовместна. В совместной системе при ее решении последние m-r уравнений (2.9) и (2.10) можно не принимать во внимание. Тогда система уравнений (2.9) и
расширенная матрица (2.10) принимают вид
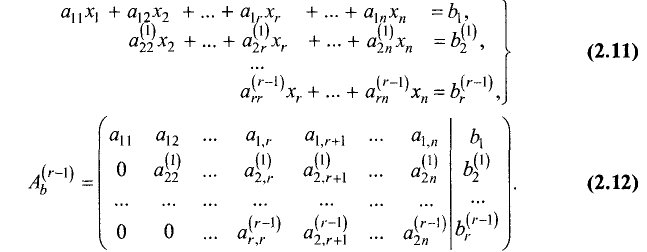
После отбрасывания уравнений, являющихся тождествами,
число оставшихся уравнений может быть либо равно числу
переменных r=n, либо меньше числа переменных. В первом случае
матрица имеет треугольный вид, а во втором — ступенчатый. Переход от системы уравнений (2.4) к равносильной ей системе (2.11)
называется прямым ходом метода Гаусса, а нахождение переменных из системы (2.11) — обратным ходом.
Пример:
Методом Гаусса решить систему уравнений
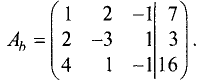
Решение:
Расширенная матрица этой системы имеет вид
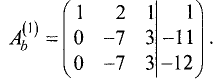
Шаг 1. Расширенную матрицу первого шага получаем за счет
умножения первой строки на —2 и сложения результата со второй
строкой, а также за счет умножения первой строки на -1 и сложения
результата с третьей строкой:
Ш а г 2. Расширенную матрицу первого шага получаем за счет
умножения второй строки на -3 и сложения результата с третьей строкой:
Эта матрица имеет треугольную форму и соответствует системе
линейных уравнений
Отсюда последовательно находим

Пример:
Методом Гаусса решить систему уравнений
Решение:
Расширенная матрица этой системы имеет вид
Ш а г 1. Расширенную матрицу первого шага получаем за счет
умножения первой строки на —2 и сложения результата со второй
строкой, а также за счет умножения первой строки на -4 и сложения результата с третьей строкой:
Ш а г 2. Расширенную матрицу первого шага получаем за счет
умножения второй строки на —1 и сложения результата с третьей строкой:

Уравнение,соответствующее третьей строке последней матрицы, противоречиво. Оно имеет вид 0 = -1. Следовательно, данная система несовместна. ►
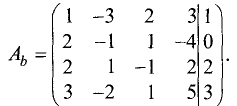
Пример:
Методом Гаусса решить систему уравнений
Решение:
Расширенная матрица этой системы имеет вид
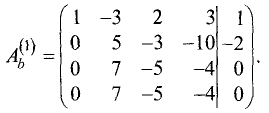
Ш а г 1. Первую строку последовательно умножаем на числа -2; —2;
-3 и складываем результат с соответствующими строками исходной
расширенной матрицы:
Ш а г 2. Умножаем вторую строку на  и на
и на  :
:
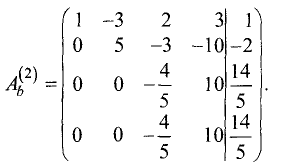
Шаг 3. Умножаем третью строку на -1.
После удаления последнего уравнения приведенная система
уравнений принимает вид
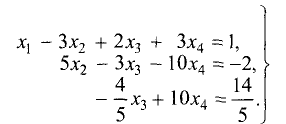
Из этой системы обратным ходом метода Гаусса находим
Так как  может принимать любые значения, то исследуемая
может принимать любые значения, то исследуемая
система имеет бесконечное множество решений. ►
Вычисление обратной матрицы методом Гаусса
Этот наиболее простой метод вычисления обратной матрицы
состоит в следующем. Пусть А — невырожденная матрица.
Припишем к ней справа единичную матрицу Е. Далее с помощью
элементарных преобразований над строками расширенной матрицы  приводим А к единичной матрице Е. В результате получим расширенную матрицу
приводим А к единичной матрице Е. В результате получим расширенную матрицу  т.е. на месте первоначально приписанной матрицы Е окажется матрица
т.е. на месте первоначально приписанной матрицы Е окажется матрица 
Пример:
Найти матрицу, обратную исходной:
Решение:
Составим расширенную матрицу:
Приведем левую половину этой матрицы к единичной матрице:

Последний столбец левой половины матрицы принял вид
последнего столбца единичной матрицы:
Последний и предпоследний столбцы левой половины матрицы
приняли вид последнего и предпоследнего столбцов единичной матрицы:
Правая половина этой расширенной матрицы является искомой
обратной матрицей, т.е.
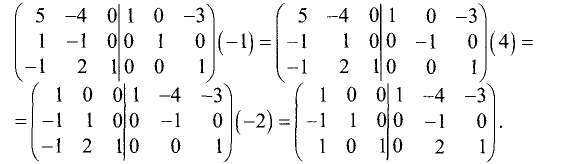
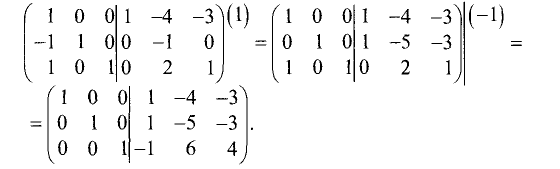
Пример:
Найти матрицу, обратную исходной:
Решение:
Составим расширенную матрицу:
Приведем левую половину этой матрицы к единичной матрице:

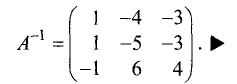
Правая половина этой расширенной матрицы является искомой
обратной матрицей, т.е.
Система линейных однородных уравнений
Система m линейных уравнений с n переменными называется системой линейных однородных уравнений, если все ее свободные члены равны нулю.
Такая система имеет вид
Система линейных однородных уравнений всегда совместна, так
как она имеет, по крайней мере, нулевое (тривиальное) решение

Если система (2.13) имеет n линейных уравнений, а ее определитель отличен от нуля, то такая система имеет только нулевое решение. Это следует из правила Крамера. Ненулевое решение возможно для систем линейных однородных уравнений, у которых определитель равен нулю или m Собственные значения и собственные векторы матриц
Пусть матрица имеет порядок n или, что то же самое, размер n х n.
Вектор  называется собственным вектором матрицы А, если найдено такое число
называется собственным вектором матрицы А, если найдено такое число  , что
, что

Число называется собственным значением матрицы А,
соответствующим вектору .
Перенеся правую часть (2.15) в левую и принимая во внимание
соотношение  перепишем (2.15) в виде
перепишем (2.15) в виде

Уравнение (2.16) эквивалентно системе линейных однородных
уравнений
Для существования ненулевого решения системы линейных
однородных уравнений (2.17) необходимо и достаточно, чтобы
определитель коэффициентов этой системы равнялся нулю, т.е.

Этот определитель является многочленом n-й степени относительно
и называется характеристическим многочленом матрицы А, а
уравнение (2.18) — характеристическим уравнением матрицы А. Корни характеристического уравнения соответствуют собственным числам матрицы А. Определив набор этих чисел, для каждого из них можно найти собственный вектор.
Пример:
Найти собственные числа и собственные векторы
матрицы
Решение:
Характеристическое уравнение этой матрицы имеет вид

Корни характеристического уравнения

Для двух переменных система уравнений (2.17), эквивалентная
уравнению (2.15) собственного вектора, представляется в виде
Подставив сюда значения корней  получим две
получим две
системы уравнений:

Каждая система является одним уравнением, что и следовало
ожидать. Это связано с тем, что определитель системы равен нулю.
Из первой системы для  и из второй для
и из второй для  следует, что
следует, что
координаты собственных векторов связаны соотношениями

Поскольку  — произвольное число, то любому собственному
— произвольное число, то любому собственному
значению матрицы соответствует бесконечное множество собственных векторов различной длины. Положим  где
где  — любое число. Тогда собственные векторы можно записать в виде
— любое число. Тогда собственные векторы можно записать в виде

Решение заданий и задач по предметам:
Дополнительные лекции по высшей математике:



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
VMath
Инструменты сайта
Основное
Навигация
Информация
Действия
Содержание
Системы линейных уравнений
Обозначим через $ \mathbb A_<> $ любое из множеств $ \mathbb Q_<>, \mathbb R_<> $ или $ \mathbb C_<> $.
Примеры систем уравнений над $ \mathbb R $.
Относительно числа $ m_<> $ уравнений не делается ни какого предположения: оно может быть меньше, больше или равно числу переменных $ n_<> $. Если $ m_<>>n $ то система называется переопределенной. Решением системы уравнений называется любой набор значений переменных $ x_1=\alpha_<1>,\dots, x_n = \alpha_n $, обращающий каждое из уравнений в истинное равенство. Система называется совместной если она имеет хотя бы одно решение и несовместной в противном случае.
Можно доказать (см. результаты ☟ НИЖЕ ), что все возможности для произвольной системы ограничиваются следующими вариантами:
1. система совместна и имеет единственное решение;
2. cистема совместна и имеет бесконечное множество решений;
3. cистема несовместна.
При этом все решения будут находиться в том же множестве $ \mathbb A_<> $, что и коэффициенты системы.
Матричная форма записи
Для системы линейных уравнений относительно переменных $ x_1,x_2,\dots,x_n $ $$ \left\< \begin
Исключение переменных (метод Гаусса)
метода достаточно проста.
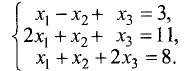
Пример. Решить систему уравнений $$ \left\< \begin
Решение. Выразим из первого уравнения $ x_ <1>$ $$ x_1=\frac<3> <2>x_2+\frac<1> <2>x_3 + \frac<3> <2>$$ и подставим в оставшиеся уравнения $$ 4 \left(\frac<3> <2>x_2+\frac<1> <2>x_3 + \frac<3><2>\right) -3\,x_2-5\,x_3=6 \ <\color
Ответ. $ x_<1>=1/4, x_2=-5/8, x_3=-5/8 $.
Теперь осталось формализовать изложенную идею метода (сформулировав допустимые правила действия над уравнениями — те, что в принципе, очевидны из здравого смысла ), а также исследовать возможные последствия его применения к системам общего вида.
Исключение переменных
Элементарными преобразованиями системы л.у. называются преобразования следующих трех типов:
1. перестановка двух уравнений;
2. умножение обеих частей уравнения на любое отличное от нуля число;
3. прибавление к одному уравнению любого другого, умноженного на произвольное число: пара уравнений $$ \begin
Теорема. Любое элементарное преобразование системы л.у. переводит эту систему в ей эквивалентную, т.е. имеющую то же множество решений, что и исходная.
Задача. С помощью элементарных преобразований привести систему л.у. к наиболее простому виду: такому, из которого легко было бы установить множество решений.
Предположим, что первое уравнение системы содержит явно неизвестную $ x_ <1>$, т.е. $ a_<11>^<> \ne 0 $. Исключим эту неизвестную из всех оставшихся уравнений. С этой целью вычтем из второго уравнения первое, домноженное на $ a_<21>/a_<11>^<> $. Получим $$\left(a_<22>— \frac
Понятно, что процесс исключения может быть продолжен и далее. Теперь посмотрим, где он может прерваться. Может так случиться, что очередная, $ \ell_<> $-я подсистема имеет коэффициент $ a_<\ell \ell>^ <[\ell-1]>$ равным нулю, что не позволит алгоритму идти дальше — т.е. исключить переменную $ x_<\ell>^<> $ из оставшихся уравнений (в принципе, такое могло случиться уже на первом шаге, если бы коэффициент $ a_<11>^<> $ был бы равен нулю). Возможные варианты дальнейших действий:
1. если хотя бы один коэффициент при $ x_<\ell>^<> $ в одном из оставшихся уравнений отличен от нуля: $ a_
2. если при всех $ j\ge \ell^<> $ коэффициенты $ a_
Поскольку число переменных конечно, то алгоритм исключения должен завершиться за конечное число шагов. Чем он может завершиться? Окончательная система должна иметь вид: $$ \left\< \begin
Предположение . Мы будем считать, что каждое из первых $ <\mathfrak r>_<> $ уравнений системы содержит в своей левой части хотя бы одну переменную с ненулевым коэффициентом.
Процесс получения системы такого вида из исходной системы уравнений называется прямым ходом метода Гаусса.
Исторический комментарий о Гауссе ☞ ЗДЕСЬ.
Установление множества решений
Теорема. Если хотя бы одно из чисел $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>,\dots , b_
Для простоты мы будем иллюстрировать наши рассуждения на системах л.у. над $ \mathbb R_<> $, в этом же множестве искать решения. Каждое из преобразований метода Гаусса будем обозначать $ \to_<> $.
Пример. Решить систему л.у.
$$ \left\< \begin
Решение. $$ \ \to \ \left\< \begin
Ответ. Система несовместна.
Пусть теперь $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>=0,<>\dots, b_ Из последнего уравнения системы можно однозначно установить значение $ x_
Из последнего уравнения системы можно однозначно установить значение $ x_
Теорема. Если прямой ход метода Гаусса заканчивается треугольной системой, т.е. $ \mathfrak r = n_<> $ и $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>=0,<>\dots, b_
Пример. Решить систему л.у.
$$ \left\< \begin
Ответ. $ x_1=1,\, x_<2>=2,\, x_3=-2 $ .
Исследуем теперь случай $ <\mathfrak r>1) :  На основании предположения , в $ <\mathfrak r>$-м уравнении этой системы имеется хотя бы один ненулевой коэффициент в левой части, пусть $ a_ <<\mathfrak r><\mathfrak s>>^<[<\mathfrak r>-1]>\ne 0 $ — первый из них. Если $ <\mathfrak s>=n $, то из этого уравнения однозначно определится $ x_
На основании предположения , в $ <\mathfrak r>$-м уравнении этой системы имеется хотя бы один ненулевой коэффициент в левой части, пусть $ a_ <<\mathfrak r><\mathfrak s>>^<[<\mathfrak r>-1]>\ne 0 $ — первый из них. Если $ <\mathfrak s>=n $, то из этого уравнения однозначно определится $ x_
Теорема. Если прямой ход метода Гаусса заканчивается трапециевидной системой, т.е. $ \mathfrak r 2) матрицы $ A_<> $ (третьего порядка). Понятие определителя распространяется и на квадратные матрицы бóльших порядков; образно говоря, определитель — это функция элементов матрицы, отвечающая за единственность решения системы уравнений.
Дальнейший матричный анализ метода Гаусса ☞ ЗДЕСЬ.
Формулы Крамера
Рассмотрим систему линейных уравнений с квадратной матрицей $ A_<> $, т.е. такую, у которой число уравнений совпадает с числом неизвестных.
Теорема. Cистема
$$ \left\<\begin
Доказательство ☞ ЗДЕСЬ
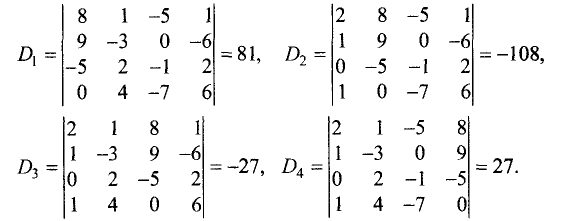
Пример. Решить систему уравнений
$$ \left\<\begin
Решение. $$ x_1=\frac<\left|\begin
Решение системы линейных уравнений с квадратной матрицей $ A_<> $ является непрерывной функцией коэффициентов этой системы при условии, что $ \det A_<> \ne 0 $.
Кроме того, формулы Крамера начинают конкурировать по вычислительной эффективности с методом Гаусса в случае систем, зависящих от параметра. Подробнее ☞ ЗДЕСЬ.
Еще один способ решения системы основан на построении обратной матрицы: $$ AX= <\mathcal B>\quad \Rightarrow \quad X=A^<-1> <\mathcal B>\ . $$ Этот способ малоэффективен при фиксированных числовых $ A_<> $ и $ <\mathcal B>_<> $.
Найти достаточное условие существования общего решения систем уравнений:
$$ A_1 X = <\mathcal B>_1 \quad u \quad A_2 Y = <\mathcal B>_2 \ , $$ при квадратных матрицах $ A_1 $ и $ A_2 $ одинакового порядка.
Теорема Кронекера-Капелли
Матрица, получающаяся конкатенацией матрицы $ A_<> $ и столбца правых частей $ <\mathcal B>_<> $ $$ [ A| <\mathcal B>] = \left( \begin
Теорема [Кронекер, Капелли]. Система $ AX= <\mathcal B>$ совместна тогда и только тогда, когда ранг матрицы этой системы совпадает с рангом ее расширенной матрицы:
$$ \operatorname
Доказательство необходимости. Пусть существует решение $ x_1=\alpha_1,\dots,x_n=\alpha_n $ системы, тогда $$\alpha_1 A_<[1]>+\dots+\alpha_n A_<[n]>= <\mathcal B>\ ,$$ т.е. столбец $ <\mathcal B>$ линейно выражается через столбцы $ A_<[1]>,\dots,A_ <[n]>$. Но тогда $$ \operatorname
Доказательство достаточности проводится в следующем пункте. ♦
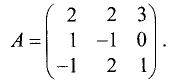
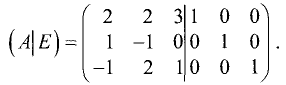
Пример. Исследовать совместность системы уравнений
Решение. В этом примере число уравнений совпадает с числом неизвестных. Это обстоятельство несколько облегчает рассуждения. Обратимся к замечанию из предыдущего пункта: система л.у. с числом уравнений, совпадающем с числом неизвестных, как правило, совместна. Тогда попробуем установить условия, обеспечивающие противоположное свойство — несовместность. Оно, фактически, единственно: за все отвечает определитель системы $ \det A_<> $. Если он отличен от нуля — система совместна. $$\det A = \left| \begin
Осталось исследовать критические случаи: $ <\color
При $ <\color
Ответ. Система несовместна при $ <\color
Система однородных уравнений
$$ \left\< \begin
Пример. Найти условие, при котором три точки плоскости с координатами $ (x_1,y_1), (x_2,y_2) $ и $ (x_3,y_<3>) $ лежат на одной прямой.
Решение. Будем искать уравнение прямой в виде $ ax+by+c=0 $ при неопределенных коэффициентах $ a,b,c_<> $. Если точки лежат на прямой, то получаем для определения этих коэффициентов систему линейных уравнений: $$ \left\< \begin
Доказать, что для совместности системы
$$ \left\< \begin
An elementary treatise on determinants
в следующей формулировке.
Теорема. Для того чтобы система $ n_<> $ неоднородных уравнений была совместна, необходимо и достаточно, чтобы порядок наибольшего отличного от нуля минора был одинаков в расширенной и нерасширенной матрице системы.
Додсон — один из самых знаменитых математиков мира. Назовите его псевдоним.
Ответ ☞ ЗДЕСЬ
Общее решение
Пусть выполнено условие теоремы Кронекера-Капелли: $ \operatorname
Пусть теперь $ \mathfrak
Пример. Исследовать совместность и найти общее решение системы уравнений:
Решение проведем двумя способами, соответствующими двум способам вычисления ранга матрицы. Вычисляем сначала ранг матрицы $ A $ по методу окаймляющих миноров: $$ |2| \ne 0,\quad \left| \begin
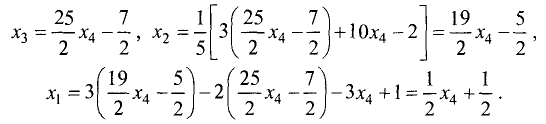
Ненулевой минор третьего порядка (базисный минор) находится в первой, второй и четвертых строках, что означает линейную независимость соответствующих уравнений. Третье уравнение линейно зависит от остальных, и может быть отброшено. Далее, указанный базисный минор образован коэффициентами при $ x_1,x_3 $ и $ x_4 $. Следовательно оставшиеся уравнения могут быть разрешены относительно этих переменных, т.е. они — зависимые, а $ x_2 $ и $ x_5 $ — основные. Использование формулы дает общее решение $$ \begin
Ответ. Общее решение системы: $ x_1=1/2 (x_2+x_5-1),\ x_3=3-4\,x_5,\ x_4=0 $.
Проанализируем теперь полученные общие формулы для общего решения. В этих формулах $ \beta_j $ представляет решение системы, получаемое при $ x_<\mathfrak
Вывод. Формула общего решения системы $ A X=\mathcal B $: $$ x_j=\beta_j + \gamma_
Теорема. Общее решение системы уравнений $ A X=\mathcal B $ представимо в виде суммы какого-то частного решения этой системы и общего решения соответствующей однородной системы $ A X=\mathbb O $.
Доказательство тривиально если система $ A X=\mathcal B $ имеет единственное решение. Если же решений бесконечно много, то выбрав какое-то одно частное $ X=X_1 $ мы получаем, что любое другое частное решение $ X=X_2 $ должно быть связано с первым соотношением $$ A(X_2-X_1)=\mathbb O , $$ т.е. разность частных решений неоднородной системы обязательно является решением однородной системы уравнений $ AX=\mathbb O $. ♦
Теперь посмотрим как можно описать общее решение однородной системы.
Система однородных уравнений
Система линейных уравнений называется однородной, если все коэффициенты правых частей равны нулю: $$ \left\< \begin
Задача ставится о поиске нетривиального решения. Оно не всегда существует. Так, к примеру, если матрица $ A_<> $ системы — квадратная и имеет ненулевой определитель, то, согласно теореме Крамера, нетривиальных решений у однородной системы нет. Теорема Кронекера-Капелли утверждает, что условие $ \det (A_<>) = 0 $ является и достаточным для существования нетривиального решения.
Теорема 1. Для того, чтобы система однородных уравнений с квадратной матрицей $ A_<> $ имела нетривиальное решение необходимо и достаточно, чтобы $ \det (A_<>) = 0 $.
Для произвольной (не обязательно квадратной) матрицы $ A_<> $ имеет место следующий общий результат.
Теорема 2. Если $ \operatorname
Теорема 3. Множество решений системы однородных уравнений образует линейное подпространство пространства $ \mathbb A^
Пусть матрица системы $ AX=\mathbb O $ квадратная и
$$ \operatorname
Теперь обсудим способы нахождения ФСР.
1. Первый из них получается из общего метода решения системы линейных уравнений, рассмотренного в предыдущем пункте. Так же, как и в том пункте, сделаем упрощающее обозначения предположение, что зависимыми переменными являются первые $ x_<1>,\dots,x_ <\mathfrak r>$, т.е. общее решение задается формулами $$ x_j=\gamma_
Оформим этот способ построения ФСР в теорему:
Теорема 4. Если система уравнений $ AX=\mathbb O $ имеет структуру матрицы $ A_<> $ вида:
$$ A = \left[ E_ <\mathfrak r>\mid P_ <\mathfrak r \times (n-\mathfrak r)>\right] \ , $$ то ее ФСР состоит из столбцов матрицы $$ \left[ \begin
Пример. Найти ФСР для системы уравнений
Решение. Приводим систему к трапециевидному виду: $$ \left\< \begin
2. Этот способ напоминает вычисление обратной матрицы методом приписывания единичной матрицы. Транспонируем матрицу $ A_<> $ системы и припишем к ней справа единичную матрицу порядка $ n_<> $: $$ \left[ A^ <\top>| E_n \right] = \left(\begin
Пример. Найти ФСР для системы уравнений
$$ \left\< \begin
$$ \left(\begin
3. Еще один способ построения ФСР основан на теореме Гамильтона-Кэли.
Теорема. Пусть матрица системы $ AX=\mathbb O $ квадратная и $ \operatorname
Пример. Найти ФСР для системы уравнений
Решение. Здесь $$ A= \left( \begin
Блок-схемы зависимости множества решений системы уравнений $ AX= \mathcal B $ от комбинации чисел $ n, \mathfrak r $ ☞ ЗДЕСЬ.
Геометрическая интерпретация
Геометрический смысл введенных определений поясним на примере $ \mathbb R^ <3>$. Уравнение $$ a_1x_1+a_2x_2+a_3x_3=b $$ — при фиксированных вещественных коэффициентах $ a_1,a_2,a_3 $ (хотя бы один из них считаем отличным от нуля) и $ b_<> $ — задает плоскость. Если, к примеру, $ a_1\ne 0 $, то из уравнения получаем выражение для $ x_ <1>$ как функции $ x_2,x_3 $: $$ x_1=\frac
Теорема. Общее решение системы уравнений $ A X=\mathcal B $ представимо в виде суммы какого-то частного решения этой системы и общего решения соответствующей однородной системы $ A X=\mathbb O $.
 Координаты произвольной точки плоскости $ a_1x_1+a_2x_2+a_3x_3=0 $ задаются соотношениями $$ \left( \begin
Координаты произвольной точки плоскости $ a_1x_1+a_2x_2+a_3x_3=0 $ задаются соотношениями $$ \left( \begin
Теперь рассмотрим систему из двух уравнений: $$ \left\<\begin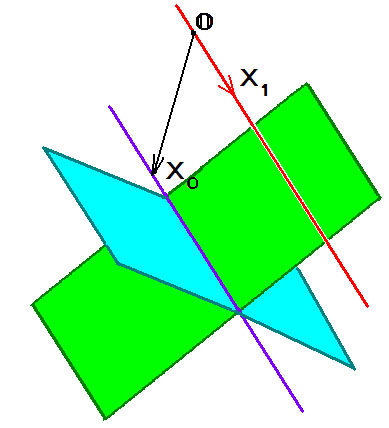 Очевидно, что любой из векторов $ X_ <1>$ или $ \tilde X_1 $ задает фундаментальную систему решений однородной системы уравнений 10) $$ \left\<\begin
Очевидно, что любой из векторов $ X_ <1>$ или $ \tilde X_1 $ задает фундаментальную систему решений однородной системы уравнений 10) $$ \left\<\begin
Мы рассмотрели пока только случай пересекающихся плоскостей в пространстве. Его можно считать общим, т.е. случаем «как правило»: две случайным образом выбранные плоскости в $ \mathbb R^ <3>$ пересекаться будут. Исследуем теперь исключительный случай — параллельности плоскостей. Исключительность этого случая может быть проверена и аналитикой. Для несовместности системы из двух уравнений необходимо, чтобы ранг ее матрицы $$ \left( \begin
Перейдем теперь к системе из трех уравнений: $$ \left\< \begin
Теорема Кронекера-Капелли в этом случае не нужна — нет, она остается справедливой! — но проверка условия на ранги матриц тривиальна: они оба равны $ 3_<> $. Если же указанный определитель обращается в нуль, то этот факт эквивалентен тому, что три строки определителя линейно зависимы. Например, возможно, что строка $ (a_<31>,a_<32>, a_<33>) $ может быть представлена в виде линейной комбинации первых двух строк. Вспомним геометрический смысл этих строк: они задают координаты векторов, перпендикулярных соответствующим плоскостям. Если система уравнений $$ \left\<\begin
Статья не закончена!
Ортогональность
Геометрические соображения из предыдущего пункта могут быть обобщены на случай когда размерности рассматриваемых пространств увеличиваются, и мы говорим о точках и векторах многомерных пространств. В последующих пунктах нам потребуются понятия линейной оболочки, линейного пространства, размерности, базиса и координат применительно к векторам-столбцам или векторам-строкам. Их можно найти ☞ ЗДЕСЬ.
Задача решения системы линейных уравнений $$ \left\< \begin
С другой стороны, к той же задаче решения системы уравнений, в предыдущем ПУНКТЕ мы подошли с другой стороны. Первое из уравнений системы $$ 3\,x_1+4\,x_2-x_3=2 $$ можно интерпретировать так: скалярное произведение векторов $ \vec<<\mathbf OA>^<[1]>> $ и $ \vec<<\mathbf OX>> $ равно фиксированному числу $ 2_<> $. Здесь вектора рассматриваются в пространстве строк $ \mathbb R_<>^ <3>$; считается, что каждый вектор имеет начало в начале координат $ \mathbf O=[0,0,0] $, а конец — в точке с координатами $ [3,4,-1] $ или, соответственно, $ [x_1,x_2,x_3] $. Если скалярное произведение векторов обозначать скобками $ \langle <> \mbox < >\rangle $, то систему уравнений можно переписать в виде $$ \langle \vec<<\mathbf OA>^<[1]>> ,\ \vec<<\mathbf OX>> \rangle=2,\ \langle \vec<<\mathbf OA>^<[2]>> ,\ \vec<<\mathbf OX>> \rangle=1 \quad npu \quad A^ <[1]>= [3,4,-1], A^<[2]>=[1,-2,3] $$ — строках матрицы $ A_<> $. И задачу решения такой системы понимать в смысле: найти координаты всех векторов-строк $ [x_1,x_2,x_3] $ которые обеспечат нам заданные значения скалярных произведений с двумя фиксированными векторами.
Геометрическая интерпретация еще более упрощается если рассмотреть случай однородной системы уравнений. Так, решить систему уравнений $$ \left\< \begin
Все эти геометрические соображения обобщаются в произвольное пространство $ \mathbb R_<>^
В терминах скалярного произведения, задачу решения системы линейных уравнений можно переформулировать как поиск строки $ X=[x_1,x_2,\dots,x_n] $, ортогональной всем строкам матрицы $ A_<> $: $$ \langle A^<[1]>,X \rangle=0, \langle A^<[2]>,X \rangle=0,\dots, \langle A^<[m]>,X \rangle=0 \ . $$ Множество таких строк образует линейное подпространство пространства $ \mathbb R_<>^
Теорема. $ \operatorname
http://lfirmal.com/reshenie-drugih-tipov-sistem-algebraicheskih-sistem-uravnenij/
http://vmath.ru/vf5/algebra2/linearsystems