Системы уравнений высших степеней в математике с примерами решения и образцами выполнения
Системы двух уравнений первой и второй степени с двумя неизвестными:
Общий вид многочлена второй степени от двух переменных у и x, очевидно, следующий:

где а, b, с, d, е, f—данные числа. Общий вид системы уравнений с двумя неизвестными, состоящей из одного уравнения первой степени и одного уравнения второй степени, следующий:

Система такого вида легко решается способом подстановки. Именно, из второго уравнения можно выразить одно из неизвестных через другое и затем подставить в первое уравнение. В результате этого первое уравнение превратится в уравнение с одним неизвестным, вообще говоря, квадратное. Решив это уравнение, мы сможем определить затем и значения нового неизвестного.
При этом способе решения систем проверка полученных решений посредством подстановки в уравнение системы не обязательна и производится только для контроля правильности вычислений, ибо можно доказать, что при исключении одного неизвестного указанным способом лишних решений возникнуть не может.
Пример:

Решение:
Исключим из системы неизвестное у. С этой целью решим второе уравнение относительно у. Получим  Затем подставим найденное выражение для у в первое уравнение. Получим
Затем подставим найденное выражение для у в первое уравнение. Получим

откуда после преобразований

и, следовательно,  Соответствующие значения для у равны
Соответствующие значения для у равны

Ответ. Система имеет два решения
Тот же прием исключения следует применять при решении систем трех уравнений с тремя неизвестными, если два уравнения имеют первую степень, третье квадратное. При этом из двух уравнений первой степени нужно выразить два неизвестных через третье неизвестное, и полученные выражения подставить в уравнение второй степени.
Таким же образом можно поступать при решении систем я уравнений с п неизвестными при любом я, если все уравнения, кроме одного квадратного, имеют первую степень.
Пример:
Решение:
Перепишем два последних уравнения системы в виде
Решая эту систему относительно х и у по обычным правилам, получим
Подставив эти выражения в первое уравнение, получим


Остается определить соответствующие значения для х и у, что делается подстановкой значений z₁, и z₂ в выражении х и у через z. Мы получим два решения системы:

Системы уравнений, решаемые особыми приемами
В гл. II, § 9 мы рассматривали системы уравнений вида
которые легко решаются при помощи формул Виета. Но, конечно, можно решать такие системы и способом исключения, описанным в предыдущем параграфе.
Часто встречающиеся системы уравнений вида
легко решаются методом исключения, но их можно решать и иначе. Именно, возведя в квадрат второе уравнение и вычитая из него первое, мы получим новое уравнение

которое является следствием данной системы. Объединив его с уравнением
мы получим систему, решаемую при помощи формул Виета.
Пример:
Решение:
Если х и у удовлетворяют уравнениям системы, то  и следовательно, 2ху = — 8; ху = — 4. Таким образом, из данной системы следует система
и следовательно, 2ху = — 8; ху = — 4. Таким образом, из данной системы следует система
для которой получаем два решения
Оба они удовлетворяют уравнениям исходной системы.
Еще проще решаются системы вида
Действительно, х² — y² = (x — у)(х + у), и потому если допустить, что х и у удовлетворяют обоим уравнениям системы, то (х—у) b = а, и следовательно,  что вместе с уравнением х + у = b дает систему двух уравнений первой степени с двумя неизвестными, являющуюся следствием исходной системы, которую легко решить. Таким же образом решается и система вида
что вместе с уравнением х + у = b дает систему двух уравнений первой степени с двумя неизвестными, являющуюся следствием исходной системы, которую легко решить. Таким же образом решается и система вида
Пример:
Решение:
Если х и у удовлетворяют уравнениям системы, то

и следовательно, х + у =b. Решая систему
получим х = 4; v = 1.
Ответ. х = 4; v = 1.
Наконец отметим системы вида
Такие системы уравнений можно решить способом исключения, именно, в силу второго уравнения  что при подстановке в первое уравнение дает уравнение относительно х, легко сводящееся к биквадратному.
что при подстановке в первое уравнение дает уравнение относительно х, легко сводящееся к биквадратному.
Однако здесь следует рекомендовать другой прием. Именно, если к первому уравнению добавить, а затем вычесть удвоенное второе, то мы получим новую систему
являющуюся следствием исходной.
Но новая система легко решается, ибо из нее следует, что
и система распадается на 4 системы уравнений первой степени
Следует отметить, что сопоставление результатов решения рассмотренной системы по способу исключения и при помощи указанного искусственного приема приводит к тем же соотношениям, которые были получены из сопоставления двух способов решения биквадратного уравнения.
Системы двух уравнений второй степени, не содержащие линейных членов
Решение системы двух уравнений второй степени с двумя неизвестными общего вида

представляет значительные трудности. Именно, можно доказать, что решение такой системы зачастую сводится к решению уравнения четвертой степени, а нахождение решения общего уравнения четвертой степени представляет довольно сложную задачу, не входящую в рамки курса элементарной алгебры.
Для некоторых систем частного вида возможно элементарное решение. Важным примером таких систем являются системы двух квадратных уравнений, каждое из которых не содержит членов первой степени относительно неизвестных, т. е. системы вида
В этом случае система решается посредством уничтожения свободных членов. Это делается так. Первое уравнение умножается на f₁ второе на f и полученные уравнения вычитаются. Составленное так новое уравнение является следствием исходной системы и имеет вид Ах²+Вху+Су² =0, из которого следует, что
(если только у ≠ 0), откуда мы можем определить отношение
Найдя это отношение, мы можем выразить х через у и затем подставить в одно из уравнений исходной системы. Получившееся в результате неполное квадратное уравнение относительно у легко решается.
Нетрудно видеть, что если А ≠ 0 и хотя бы один из свободных членов в исходных уравнениях отличен от 0, то сделанное выше предположение у ≠ 0 не нарушает общности.
Действительно, если в уравнении Ах² + Вху + Су² == 0 при А ≠ 0 положим у = 0, то и х = 0. Но x = 0; y = 0 не может быть решением исходной системы, если хотя бы один из ее свободных членов отличен от нуля.
Если же коэффициент А = 0, то решение вспомогательного уравнения Вху + Су² = 0 только упрощается, для решения достаточно вынести за скобку у и приравнять к нулю каждый множитель.
Пример:
Решение:
Умножив первое уравнение на 7 и второе на 3, получим после вычитания


Таким образом, х = 22у или х = 2у. Дальнейшее очевидно. Доведя решение до конца, получим четыре решения системы
Решение систем уравнений высших степеней
Задача о решении системы уравнений высших степеней с несколькими неизвестными в общем случае является очень трудной, часто не допускающей решения средствами элементарной алгебры. Однако во многих случаях, комбинируя известные методы решения уравнений и систем уравнений — метод сложения и вычитания, исключения неизвестного с помощью подстановки, введения нового неизвестного— удается найти путь к решению системы. Но в каждой отдельной задаче приходится использовать ее частные особенности для того, чтобы найти удачный метод решения. Рассмотрим несколько примеров.
Пример:
Решить систему уравнений.
Решение:
Способ 1. Из второго уравнения находим, что у = 3 — х. Подставив в первое уравнение, получаем

и, после упрощений,


Соответствующие значения для у будут такими:

Система имеет два решения.
Способ 2. Представим х³ + y³ = 18 как

Принимая во внимание второе уравнение, получим 27 — 9xy = 18, откуда ху = 1. Система
есть следствие исходной, но и исходная есть следствие преобразованной, ибо если х + у = 3; ху = 1, то

Решая преобразованную систему при помощи формул Виета, получим те же два решения:
Пример:
Решение:
Исключение одной из неизвестных величин приводит к решению уравнения четвертой степени, в котором все коэффициенты отличны от нуля. Поэтому лучше избежать этого пути. Это легко сделать, введя новую неизвестную z = xy. Тогда

Таким образом, для z получаем уравнение

откуда z₁ = 47; z₂ = 3.
Итак, данная система расщепилась на две системы:
первая из которых не имеет действительных решений, а вторая имеет следующие решения:

Указанный прием удобно применять к системам двух уравнений с двумя неизвестными, в случае если каждое из уравнений симметрично относительно х и у, т. е. если уравнения не изменяются при перемене х и у местами.
Пример:
Решить систему уравнений:
Решение:
Перемножив уравнения системы, получим

откуда xyz = ±30. Но так как ху = 5, то отсюда следует, что =5z±30 и z = ±6. Теперь х и у легко определить из второго и третьего уравнений системы. Мы приходим к двум решениям:

Пример:
Решить систему уравнений
Решение:
Возвысив обе части первого уравнения в квадрат, получим

Вычитая из этого уравнения второе уравнение данной системы, получим 2x³y³ = 686, откуда (xy)³ = 343; ху = 7. Теперь из первого уравнения данной системы находим, что  Итак, решение данной системы свелось к решению системы
Итак, решение данной системы свелось к решению системы

Пример:
Решить систему уравнений
Решение:
В первом уравнении раскроем скобки в каждом множителе. Затем поделим обе части обоих уравнений на ху. Получим
Теперь введем новые неизвестные  В новых неизвестных преобразованная система имеет такой вид:
В новых неизвестных преобразованная система имеет такой вид:
Эта система легко решается. Получаем:

Далее находим значения для х и у из уравнений
Всего получим восемь решений:

Многообразие приемов, которые могут применяться при решении систем уравнений высших степеней, неисчерпаемо, и тем не менее найти путь к решению данной системы удается далеко не всегда. Важно проявлять изобретательность при решении системы в тех случаях, когда это возможно.
Графическое решение уравнений с одним неизвестным
Как уже было сказано, алгебраические методы решения систем уравнений далеко не всегда применимы. Но для целей практики бывает важно находить решения систем уравнений хотя бы приближенно. Эта цель хорошо достигается применением графических методов. Сначала рассмотрим применение графиков к приближенному решению одного уравнения с одним неизвестным.
Пусть дано уравнение х²- 4x+1 = 0. Для того чтобы графически решить такое уравнение, рассматриваем неизвестное х как независимое переменное, а левую часть уравнения как функцию этой переменной, т. е. введем в рассмотрение функцию y = x²-4x+1
Решить предложенное уравнение — значит узнать, при каких значениях независимой переменной х функция у обращается в нуль.
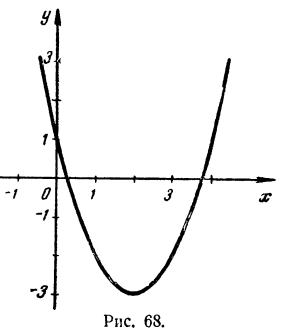
Точки графика, соответствующие таким значениям независимой переменной, лежат на оси абсцисс, ибо ордината каждой такой точки равна нулю. Следовательно, интересующие нас точки графика являются точками пересечения графика с осью абсцисс, а корни уравнения x²-4x+1=0 являются абсциссами этих точек пересечения. При этом абсцисса каждой точки пересечения графика с осью абсцисс является корнем уравнения x²-4x+1=0
Строим график функции y = x²-4x+1 Он имеет вид параболы с вершиной в точке (2,-3) (рис. 68). По чертежу находим, что  В действительности
В действительности
Совершенно такие же рассуждения можно применить к любому уравнению .у —0, где у есть алгебраическое выражение от неизвестной х. Именно, для графического решения такого уравнения нужно построить график выражения у, рассматриваемого как функция от переменной х, и найти точки пересечения этого графика с осью абсцисс. Абсциссы точек пересечения будут корнями уравнения. Конечно, при графическом решении уравнений корни получаются приближенно и довольно грубо, так как на чертеже произвести измерение абсцисс с высокой степенью точности невозможно.
Пример:
Решение:
Строим график функции у = x³ — 4x + 1, вычислив предварительно таблицу значений:

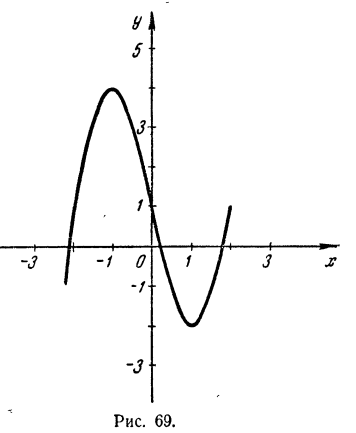
По результатам этих вычислений мы видим, что при изменении х от —3 до —2 функция переходит от отрицательных значений к положительным, на участке от 0 до 1 переходит от положительных значений к отрицательным и на участке от 1 до 2 снова от отри-
нательных значений к положительным. На этих участках и следует ожидать, что график пересечет ось абсцисс.
Проводим вычисления для некоторых промежуточных значений х, взятых на этих участках с целью уточнения хода функции:
Теперь построим график по всем вычисленным точкам, соединив их плавной линией (рис. 69).
Из этого чертежа мы получаем:
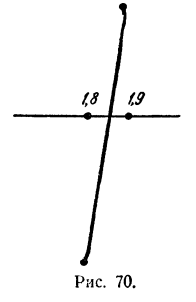
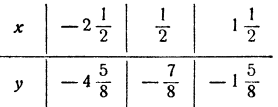
Для того чтобы уточнить значения корней, следует построить в бoльшем масштабе участки графика, примыкающие к корням, вычислив дополнительно значения функции на этих участках. Например, для уточнения корня х₃ проведем следующее вычисление:
Изобразим эти точки на чертеже, приняв большую единицу масштаба (рис. 70).
На таком малом участке изменения х мы вправе считать, что график очень близок к прямой линии. Исходя из этого предположения, получим
Графическое решение систем двух уравнений с двумя неизвестными
Пусть дана система уравнений с двумя неизвестными х и у. Каждое из этих уравнений, взятое отдельно, определяет зависимость между величинами х и у.
Построим на одном чертеже графики этих зависимостей. Числа (x₀y₀), образующие решение системы, должны удовлетворять обоим уравнениям системы, а следовательно, точка с координатами (х₀ у₀) должна лежать на графиках обеих зависимостей, т. е. должна являться точкой пересечения этих графиков.
Обратно, координаты (x₀у₀) любой точки пересечения построенных графиков удовлетворяют обоим уравнениям системы, т. е. образуют решение системы.
Таким образом, для того чтобы графически решить систему двух уравнений с двумя неизвестными, нужно построить график для каждого из уравнений и найти точки пересечения этих графиков. Координаты каждой точки пересечения образуют решение системы.
Пример:
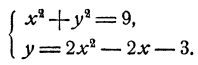
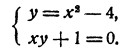
Решить графически систему уравнений
Решение:
Алгебраическое решение этой системы затруднительно. Хотя неизвестное у и легко исключается посредством подстановки в первое уравнение его выражения через дг из второго уравнения, но в результате такого исключения получается уравнение четвертой степени относительно х, решение которого выходит за рамки элементарного курса алгебры.
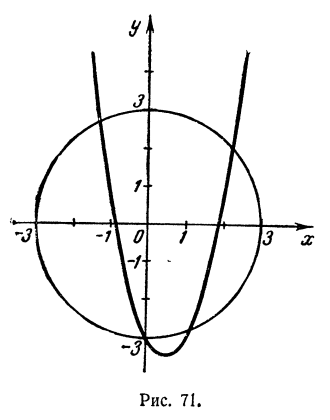
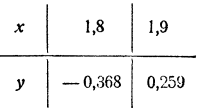
Обратимся к построению графиков. Графиком зависимости х² + у² = 9 является, как мы видели (гл. III, § 3, третий пример), окружность с центром в начале координат и радиусом, равным 3. Графиком зависимости у= 2х² — 2х — 3 является парабола, которую легко построить по таблице значений (рис. 71). Графики пересекаются в четырех точках, координаты которых суть приближенно (—1,2; 2,7); (0; —3); (1,1; —2,8) и (2,2: 2,0).
Следовательно, данная система имеет четыре решения
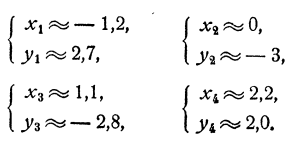
Второе решение оказывается точным. Остальные три — приближенные.
Графическое решение системы двух уравнений с двумя неизвестными почти не сложнее графического решения одного уравнения с одним неизвестным, а иногда даже проще.
Поэтому часто бывает полезно преобразовать посредством введения нового неизвестного одно уравнение с одним неизвестным в систему двух уравнений с двумя неизвестными, а затем решать эту систему графически. При таком преобразовании следует заботиться о том, чтобы построение графиков обоих уравнений полученной системы было как можно проще.
Рассмотрим несколько примеров на применение этого приема.
Пример:
Решить графически уравнение
Решение:
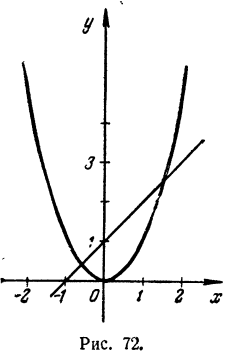
Представим предложенное уравнение в виде x²=x+1. Мы видим, что в левой и правой частях уравнения находятся некоторые функции от х. Решить уравнение — значит найти, при каких значениях независимого параметра обе функции принимают равные значения. Графически это означает, что нужно найти абсциссы точек пересечения графиков функций у = х² и у =х 1.
Действительно, если при х = а а² = а + 1, то это значит, что точка (а, а²) совпадает с точкой (a, a+1) и, следовательно, принадлежит как графику функции у = х², так и графику функции у = х + 1.
Очевидно и обратное. Если графики функций у = х² и у = x + 1 пересекаются в точке (а, b), то b = a² = a + 1 и, следовательно, при х = а обе функции принимают равные значения. Все сказанное можно коротко изложить так.
Вводим новую неизвестную y = х². Тогда данное уравнение переходит в уравнение у — х—1= 0, которое вместе с введенной зависимостью дает систему
Графиком зависимости у = х² является .парабола, графиком зависимости у = х + 1— прямая линия (рис. 72). Решение задачи дают абсциссы точек пересечения. Они равны приближенно: 
Любое приведенное квадратное уравнение х² + рх + q = 0 может быть решено тем же образом, посредством преобразования в систему
Это удобно тем, что графиком первой зависимости является одна и та же парабола, а графиком второй зависимости является прямая линия, которую очень легко построить в каждом частном случае по двум точкам. Поэтому, тщательно построив в большом масштабе параболу у=х3, мы получаем возможность быстро решать любое приведенное квадратное уравнение.
Подобным образом для решения кубического уравнения, имеющего вид х³ + рх + q = 0, достаточно заготовить график функции у = х³. Абсциссы точек пересечения этого графика с прямой у + рх + q = 0 дают корни уравнения x³ + + q = 0.
Пример:
Превратив в систему, решить графически уравнение

Решение:
Это делают приемом, указанным выше. Однако это можно сделать и иначе. Именно, перепишем уравнение в виде х(х² — 4)+1=0
и положим х² — 4 = у. Уравнение заменится системой
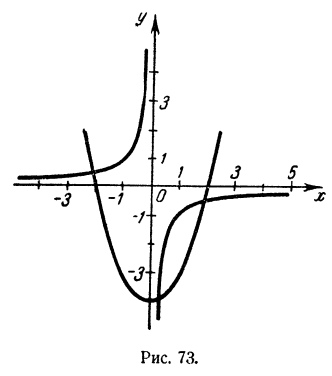
Графиком первого уравнения системы является парабола, графиком второго — гипербола (рис. 73). Абсциссы точек пересечения суть 

Этим приемом можно решить любое кубическое уравнение

Графиком первого уравнения является парабола, графиком второго — гипербола.
Решение уравнения четвертой степени ах⁴ + bх² + сх + d = 0 при с ≠ 0 легко сводится к определению точки пересечения двух парабол.
Для этого вводим новое неизвестное у = х² У и уравнение заменяем системой
Графиком первого уравнения является парабола с вершиной в начале координат и осью, совпадающей с осью ординат. Графиком второго уравнения тоже является парабола, но только ее ось параллельна оси абсцисс. Действительно, решив второе уравнение относительно х, мы получим
т. с. х является квадратичной функцией от у, графиком которой является парабола с осью, параллельной оси абсцисс.
Из рассмотренных примеров ясно, что каждое данное уравнение с одним неизвестным можно преобразовать а систему двух уравнений с двумя неизвестными многими способами и при выборе какого-нибудь способа следует заботиться о наиболее выгодном расположении графиков на чертеже.
Уточнение корня уравнения или решения системы нелинейных уравнений, исходя из грубого приближения
При графическом решении корень уравнения или решение системы уравнение определяется лишь грубо приближенно. Уточнение результата за счет увеличения масштаба не очень эффективно, так как повышение точности требует пропорционального увеличения масштаба. Например, чтобы определить новую значащую цифру после занятой в десятичном разложении корня, т. е. увеличить точность в 10 раз, нужно и масштаб увеличить в 10 раз.
Однако существует весьма хорошо действующий алгебраический способ для подобного рода уточнения. Мы не будем излагать его в общем виде, а ограничимся только рассмотрением примеров его применения.
Пример:
Для уравнения x³ — 4x + 1= 0 известно приближенное значение одного из корней х ≈1,8. Требуется вычислить этот корень с большей точностью.
Решение:
Поступаем так. Положим x =1,8 + h, где h — новая неизвестная. Мы можем быть уверены, что h есть маленькое число, во всяком случае меньшее, чем 0,1. Подставив в уравнение вместо х его выражение через h, получим


Так как h² меньше h во столько же раз, во сколько h меньше единицы, для приближенного вычисления h отбросим в полученном уравнении члены с h² и h³. Получим


Для дальнейшего уточнения мы можем еще раз применить тот лее прием. Положим x≈1,86 + h₁,. Для h₁ получим, отбрасывая члены, содержащие h₁² и h₁³, приближенное уравнение

(При этом нет надобности вычислять коэффициенты при h₁² и h₁³ , ибо соответствующие члены мы все равно отбрасываем.) Отсюда h≈ 0,0008 и, следовательно,x ≈ 1,8608.
Продолжая этот прием, мы можем получить значение корня уравнения с любой степенью точности.
В общем виде идея метода такова. Если х₀ есть приближенное значение корня данного уравнения, мы полагаем в уравнении x= x₀ + h и в полученном уравнении относительно h отбрасываем члены, содержащие h выше, чем в первой степени, и решаем приближенно получившееся уравнение первой степени относительно h. Тогда число x₁ = x₀ + h оказывается, вообще говоря, значительно лучшим приближением к корню, чем исходное приближение х₀. В случае надобности процесс можно повторить.
Пример:
Для одного решения системы уравнений
известны приближенные значения х ≈ 2,2, у ≈ 2,0. Найти решение с большей точностью.
Решение:
Будем действовать тем же способом, как при уточнении корня одного уравнения с одним неизвестным. Именно, положим x = 2,2 + h; .у = 2,0 + к и, подставив в уравнение, отбросим все члены, содержащие h², k², hk, так как эти величины значительно меньше самих h и k. Получим

Решив эту систему, получим h ≈ — 0,03, k ≈ 0,07. Таким образом, уточненными значениями для х и у являются значения
Для дальнейшего уточнения можно повторить тот же процесс.
Решение заданий и задач по предметам:
Дополнительные лекции по высшей математике:



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Определители второго и третьего порядков и их свойства с примерами решения
Содержание:
Определители второго порядка:
Под определителем (детерминантом) второго порядка понимается выражение

Числа 
Формула (1) дает правило «развертывания» определителя второго порядка, а именно: определитель второго порядка равен разности произведений его элементов первой и второй диагоналей.
Определители второго порядка
С помощью определителей второго порядка удобно решать линейные системы двух уравнений с двумя неизвестными:

Такую линейную систему, в которой свободные члены находятся в правых частях, для определенности мы будем называть стандартной.
Под решением системы (2) понимается всякая пара чисел (х, у), обращающая эту систему в тождество. Если существует только одна такая пара, то решение называется единственным. Аналогично вводится понятие решения для системы, содержащей п неизвестных  .
.
Для нахождения решений системы (2) применим метод исключения. Умножая первое уравнение системы (2) на  , а второе — на —
, а второе — на —  и складывая, будем иметь
и складывая, будем иметь

Аналогично, умножая первое уравнение системы (2) на а2 второе — на  складывая, получаем
складывая, получаем

Введем определитель системы
а также дополнительные определители
Заметим, что дополнительные определители Dx и Dy получаются из определителя системы D путем замены коэффициентов при указанном неизвестном на соответствующие свободные члены.
Уравнения (3) и (4) принимают вид

Если  , то отсюда получаем, что система (2) имеет единственное решение
, то отсюда получаем, что система (2) имеет единственное решение

Замечание. Если определитель D = 0, то система (2) или не имеет решений (т. е. несовместна), или имеет бесконечно много решений (т. е. система неопределенная).
Пример:

Решение:
Имеем 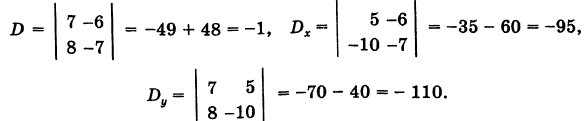
Отсюда на основании формул Крамера (6) получаем
 Геометрически решение (95; 110) представляет собой точку пересечения прямых (7).
Геометрически решение (95; 110) представляет собой точку пересечения прямых (7).
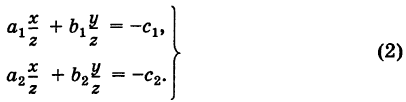
Система двух однородных уравнений с тремя неизвестными
Рассмотрим однородную систему

Эта система всегда совместна, так как, очевидно, имеет нулевое решение х = 0, у = 0, z = 0. Однако интересно найти не н у л е в ы е решения (х, у, z) системы (1). Пусть, например,  .
.
Тогда систему (1) можно переписать в виде
 Отсюда, предполагая, что
Отсюда, предполагая, что 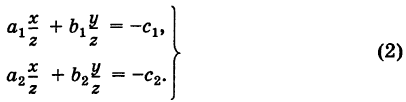 , получаем
, получаем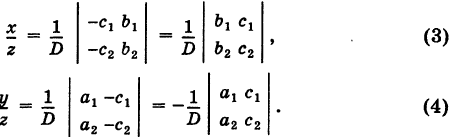
Введем в рассмотрение матрицу коэффициентов системы (1)
Определители второго порядка  , которые получаются из матрицы (5) путем вычеркивания соответствующего столбца, называются ее минорами. Таким образом, имеем
, которые получаются из матрицы (5) путем вычеркивания соответствующего столбца, называются ее минорами. Таким образом, имеем 
Используя эти обозначения, уравнения (3) и (4) можно переписать в следующем виде:

Равенства (6), очевидно, справедливы также и для нулевого решения.
Таким образом, имеем следующее правило: неизвестные однородной системы (1) пропорциональны соответствующим минорам ее матрицы коэффициентов, взятым с надлежащими знаками.
Обозначая через t коэффициент пропорциональности для отношений (6), получим полную систему решений системы (1):

При выводе формул (7) мы предполагали, что  . Однако, как легко убедиться, формулы (7) будут справедливы, если любой (хотя бы один) из миноров
. Однако, как легко убедиться, формулы (7) будут справедливы, если любой (хотя бы один) из миноров  отличен от нуля.
отличен от нуля.
Замечание. Если все миноры  равны нулю, то система (1) требует особого рассмотрения.
равны нулю, то система (1) требует особого рассмотрения.
Пример:

Решение:
Составляя матрицу коэффициентов
находим ее миноры:  На основании формулы (7) полная система решений системы (8) имеет вид
На основании формулы (7) полная система решений системы (8) имеет вид

где 
Простейшее ненулевое решение системы (1), получающееся при t — 1, есть х = -3, у = 18, z = 13.
Определители третьего порядка

Числа  называются элементами определителя; они расположены в трех строках и трех столбцах его (ряды определителя). ,
называются элементами определителя; они расположены в трех строках и трех столбцах его (ряды определителя). ,
Раскрывая определители второго порядка (миноры) в формуле (1) и собирая члены с одинаковыми знаками, получаем, что определитель третьего порядка представляет собой знакопеременную сумму шести слагаемых:

из которых три берутся со знаком плюс, а три — со знаком минус.
Пример:

Решение:
Используя формулу (1), имеем  В дальнейшем мы укажем более удобные способы вычисления определителей третьего порядка.
В дальнейшем мы укажем более удобные способы вычисления определителей третьего порядка.
Определение: Под минором элемента определителя третьего порядка понимается определитель младшего (второго) порядка, получающийся из данного определителя в результате вычеркивания строки и столбца, содержащих данный элемент.
Например, для определителя (3) минором его элемента 2, стоящего во второй строке и в первом столбце, является определитель  В дальнейшем для краткости будем говорить, что элемент определителя третьего порядка занимает четное место, если сумма номеров его строки и его столбца есть число четное, и нечетное место, если эта сумма есть число нечетное.
В дальнейшем для краткости будем говорить, что элемент определителя третьего порядка занимает четное место, если сумма номеров его строки и его столбца есть число четное, и нечетное место, если эта сумма есть число нечетное.
Определение: Алгебраическим дополнением (минором со знаком) элемента определителя третьего порядка называется минор этого элемента, взятый со знаком плюс, если элемент занимает четное место у и со знаком минус, если его место нечетное.
Таким образом, если М есть минор элемента определителя, a i и j — соответственно номер строки и номер столбца, на пересечении которых находится данный элемент, то его алгебраическое дополнение есть
Например, для элемента с2 определителя (1), находящегося во второй строке и в третьем столбце, его алгебраическое дополнение есть
Соответствующие знаки, приписываемые при этом минорам элементов определителя, можно задать таблицей
В дальнейшем алгебраические дополнения элементов определителя с буквенными элементами условимся обозначать соответствующими прописными (большими) буквами.
Теорема Разложения: Определитель третьего порядка равен сумме парных произведений элементов какого-либо ряда его на их алгебраические дополнения (под рядом понимается строка или столбец).
Таким образом, для определителя (1) справедливы шесть разложений: 
Легко проверить, что формулы (4) и (5) дают одно и то же выражение (2), принятое за определение.
Замечание. С помощью формул типа (4) или (5), по индукции, можно ввести определители высших порядков.
Основные свойства определителей
При формулировках мы не будем указывать порядок определителя, так как эти свойства справедливы для определителей любого порядка.
I. (Равноправность строк и столбцов.) Определитель не меняет своего значения при замене всех его строк соответствующими столбцами, т. е.
Действительно, разлагая первый определитель по элементам первой строки, а второй — по элементам первого столбца, в силу теоремы разложения мы получим один и тот же результат.
II. При перестановке двух параллельных рядов определителя его модуль сохраняет прежнее значение, а знак меняется на обратный.
Пусть, например, в определителе  переставлены первая и вторая строки; тогда получим определитель
переставлены первая и вторая строки; тогда получим определитель  Разлагая определитель D по элементам второй строки и учитывая, что при перестановке строк изменилась четность мест этих элементов, будем иметь
Разлагая определитель D по элементам второй строки и учитывая, что при перестановке строк изменилась четность мест этих элементов, будем иметь

Аналогичное положение получается и в других случаях.
Следствие 1. Определитель, у которого два параллельных ряда одинаковы, равен нулю.
В самом деле, пусть, например,
Переставляя первую и вторую строки определителя, в силу теоремы получим определитель -D. Но очевидно, эта операция не изменяет определитель D, поэтому -D = D и, следовательно, D = 0.
Следствие 2. Сумма парных произведений элементов какого-либо ряда определителя на алгебраические дополнения соответствующих элементов параллельного ряда равна нулю, т. е. для определителя (2) имеем  и т. д., а также
и т. д., а также  и т. д. (всего таких соотношений можно написать двенадцать).
и т. д. (всего таких соотношений можно написать двенадцать).
Левые части всех соотношений (3) и (4) представляют собой разложения соответствующих определителей третьего порядка, содержащих два одинаковых параллельных ряда и, следовательно, равны нулю. Например,  (здесь разложение нужно производить во второй строке!).
(здесь разложение нужно производить во второй строке!).
III. Общий множитель элементов какого-либо ряда определителя можно выносить за знак определителя, т. е.
Это свойство непосредственно вытекает из разложения определителя по элементам соответствующего ряда.
Следствие 1. Если все элементы какого-либо ряда определителя равны нулю, то определитель равен нулю.
Следствие 2. Если элементы какого-либо ряда определителя пропорциональны соответствующим элементам параллельного ряда его, то определитель равен нулю.
Например, имеем 
IV. Если элементы какого-либо ряда определителя представляют собой суммы двух слагаемых, то определитель может быть разложен на сумму двух соответствующих определителей.
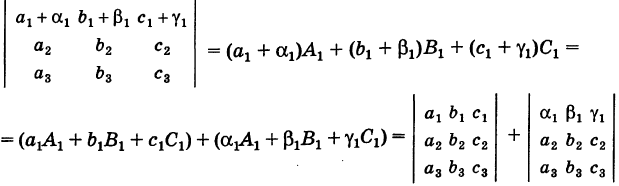
Следствие. Величина определителя не изменится, если /с элементам какого-либо ряда его прибавить (или отнять) числа, пропорциональные соответствующим элементам параллельного ряда с одним и тем же коэффициентом пропорциональности (так называемые «элементарные преобразования определителя»).
Рассмотрим, например, определители
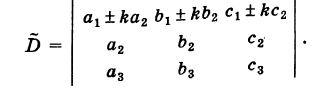
Используя свойства IV и III, будем иметь 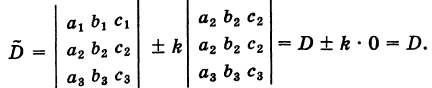 Элементарные преобразования дают удобный способ вычисления определителей.
Элементарные преобразования дают удобный способ вычисления определителей.
Пример:
Вычислить симметричный определитель
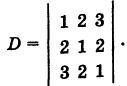
Решение:
Вычитая из второй строки удвоенную первую строку, а из третьей строки утроенную первую строку, получим 
Система трех линейных уравнений
Рассмотрим стандартную линейную систему трех уравнений
свободные члены которых находятся в правых частях. Под решением системы понимается всякая тройка чисел (х, у, г), удовлетворяющая этой системе. Введем определитель системы
 а также дополнительные определители
а также дополнительные определители
Последовательно умножая уравнения системы (1) на алгебраические дополнения  соответствующих элементов
соответствующих элементов 
 первого столбца определителя D, получим
первого столбца определителя D, получим

Отсюда, применяя теорему разложения и следствие 2 к свойству II, будем иметь  , т. е.
, т. е.  Используя алгебраические дополнения элементов второго и третьего столбцов определителя D, аналогично находим
Используя алгебраические дополнения элементов второго и третьего столбцов определителя D, аналогично находим

Если определитель системы  , то из уравнений (5) и
, то из уравнений (5) и  получаем единственное решение системы (1):
получаем единственное решение системы (1):  Таким образом, имеем правило Крамера: неизвестные стандартной линейной системы (1) с ненулевым определителем представляют собой дроби, знаменатель которых есть определитель системы, а числители равны соответствующим дополнительным определителям.
Таким образом, имеем правило Крамера: неизвестные стандартной линейной системы (1) с ненулевым определителем представляют собой дроби, знаменатель которых есть определитель системы, а числители равны соответствующим дополнительным определителям.
Замечание. Если определитель системы D = 0, то система (1) или несовместна, или имеет бесконечно много решений.
Пример:
Решение:
Вычитая из второго столбца удвоенный первый столбец, а из третьего столбца утроенный первый столбец, получим
Для дополнительных определителей находим следующие значения: 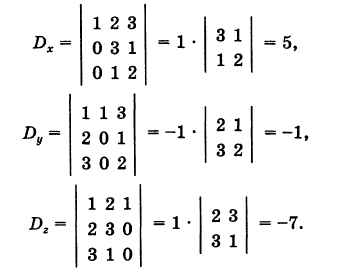 Используя правило Крамера, получаем решение системы:
Используя правило Крамера, получаем решение системы:

Однородная система трех линейных уравнений
Рассмотрим линейную систему

свободные члены которой равны нулю. Такая линейная система называется однородной.
Однородная линейная система (1), очевидно, допускает нулевое решение х = 0, у = 0, z = 0 и, следовательно, всегда совместна.
Интересно выяснить случаи, когда однородная система имеет ненулевые решения.
Теорема: Линейная однородная система трех линейных уравнений с тремя неизвестными имеет ненулевые решения тогда и только тогда, когда ее определитель равен нулю, т. е.
Доказательство: Пусть система (1) имеет ненулевое решение  Если определитель ее
Если определитель ее  то на основании формул Крамера система (1) обладает только нулевым решением, что противоречит предположению. Следовательно, D = 0.
то на основании формул Крамера система (1) обладает только нулевым решением, что противоречит предположению. Следовательно, D = 0.
Пусть D = 0. Тогда линейная система (1) либо несовместна, либо имеет бесконечно много решений. Но наша система совместна, так как имеется нулевое решение. Следовательно, система (1) допускает бесконечно много решений, в том числе и ненулевые.
Замечание. Укажем способ нахождения ненулевых решений однородной системы (1) в типичном случае.
Пусть определитель системы D = 0, но не все его миноры второго порядка равны нулю.
Мы будем предполагать, что

(этого всегда можно добиться с помощью перестановки уравнений и изменения нумерации неизвестных).
Рассмотрим подсистему, состоящую из двух первых уравнений системы (1):
В силу решения этой системы имеют вид

 где
где  — соответствующие алгебраические дополнения. Подставляя эти числа в неиспользованное третье уравнение системы (1) и учитывая, что определитель D = 0, получаем
— соответствующие алгебраические дополнения. Подставляя эти числа в неиспользованное третье уравнение системы (1) и учитывая, что определитель D = 0, получаем

Следовательно, формулы (5), где t произвольно, дают все решения полной системы (1).
Геометрически уравнения системы (1) представляют собой уравнения трех плоскостей в пространстве Oxyz. Если определитель  , то эти плоскости пересекаются в единственной точке 0(0, 0, 0); если же определитель D =0, но не все его миноры второго порядка равны нулю, то в нашем случае эти плоскости пересекаются по прямой линии (как «листы книги»). Без рассмотрения оставлен случай слияния трех плоскостей.
, то эти плоскости пересекаются в единственной точке 0(0, 0, 0); если же определитель D =0, но не все его миноры второго порядка равны нулю, то в нашем случае эти плоскости пересекаются по прямой линии (как «листы книги»). Без рассмотрения оставлен случай слияния трех плоскостей.
Система линейных уравнений с многими неизвестными. Метод Гаусса
Рассмотрим систему  линейных уравнений с
линейных уравнений с  неизвестными:
неизвестными:

Здесь для коэффициентов системы введена двойная индексация, а именно: у коэффициента  первый индекс i обозначает номер уравнения, а второй j — номер неизвестного. Для удобства выкладок свободные члены обозначены через
первый индекс i обозначает номер уравнения, а второй j — номер неизвестного. Для удобства выкладок свободные члены обозначены через 
Наиболее простой метод решения системы (1) — это метод исключения. Мы изложим его в форме схемы Гаусса (обычно называемой методом Гаусса).
Пусть для определенности  — ведущий коэффициент». Разделив все члены первого уравнения на аи, будем иметь приведенное уравнение
— ведущий коэффициент». Разделив все члены первого уравнения на аи, будем иметь приведенное уравнение


Рассмотрим i-e уравнение системы (1):

Для исключения xx из этого уравнения умножим приведенное уравнение (2) на ап и полученное уравнение вычтем из уравнения (4). Тогда будем иметь


Таким образом, получаем укороченную систему

коэффициенты которой определяются по формулам (6).
Если ее ведущий коэффициент  , то из системы (7) указанным выше приемом можно исключить неизвестное
, то из системы (7) указанным выше приемом можно исключить неизвестное  . причем новые коэффициенты будут вычисляться по формулам типа (6) и т.д. Эта часть вычислений называется прямым ходом метода Гаусса.
. причем новые коэффициенты будут вычисляться по формулам типа (6) и т.д. Эта часть вычислений называется прямым ходом метода Гаусса.
Для определения неизвестных 
 Рассмотрим приведенные уравнения
Рассмотрим приведенные уравнения

Отсюда последовательно находим неизвестные (обратный ход)  Заметим, что операции (9) выполняются без деления.
Заметим, что операции (9) выполняются без деления.
Если очередной ведущий коэффициент окажется равным нулю, то уравнения системы следует переставить надлежащим образом. Возможно, конечно, что система (1) несовместна. Тогда, естественно, метод Гаусса не допускает реализации.
Пример:
Методом Гаусса решить систему

Решение:
Составляем таблицу коэффициентов системы (10), рассматривая свободные члены ее как коэффициенты при  :
: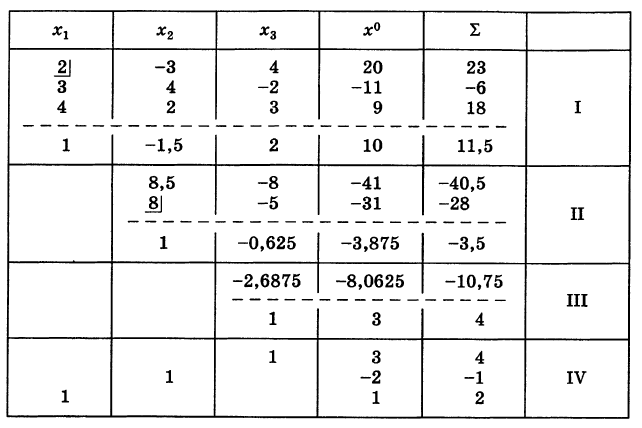
Последний столбец  содержит суммы элементов соответствующих строк таблицы; этот столбец служит для контроля вычислений.
содержит суммы элементов соответствующих строк таблицы; этот столбец служит для контроля вычислений.
Считая отмеченный коэффициент 2 ведущим и деля на этот коэффициент все элементы первой строки таблицы (включая и входящий в столбец  ), получаем коэффициенты первого приведенного уравнения (см. табл.). Текущий контроль вычислений осуществляется тем, что элемент из столбца
), получаем коэффициенты первого приведенного уравнения (см. табл.). Текущий контроль вычислений осуществляется тем, что элемент из столбца  равен сумме всех остальных элементов этой строки. Этим заканчивается заполнение раздела I таблицы.
равен сумме всех остальных элементов этой строки. Этим заканчивается заполнение раздела I таблицы.
Далее, используя формулу (6), подсчитываем коэффициенты укороченной системы, не содержащей неизвестного xv Для наглядности будем называть строку, содержащую коэффициенты приведенного уравнения, приведенной, а столбец, содержащий ведущий элемент раздела, — ведущим. Тогда на основании формулы (6) справедливо правило: преобразованные коэффициенты схемы Гаусса, равны ее прежним коэффициентам минус произведение «проекций» их на соответствующие приведенную строку и ведущий столбец таблицы. Пользуясь этим, заполняем раздел II таблицы, включая контрольный столбец. Для удобства вычислении в качестве ведущего коэффициента раздела П берем элемент 8 (см. табл.).
Аналогично производится заполнение раздела III таблицы. Этим заканчивается прямой ход схемы Гаусса.
Неизвестные  последовательно определяются из приведенных уравнений
последовательно определяются из приведенных уравнений
(обратный ход). Результаты обратного хода помещены в разделе IV таблицы.
Заметим, что если в качестве свободных членов взять элементы столбца  , то для неизвестных получатся значения
, то для неизвестных получатся значения 

 превышающие на единицу значения неизвестных
превышающие на единицу значения неизвестных  Этим обеспечивается заключительный контроль вычислений.
Этим обеспечивается заключительный контроль вычислений.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Метод Гаусса — определение и вычисление
- Прямая линия на плоскости и в пространстве
- Плоскость в трехмерном пространстве
- Функция одной переменной
- Ряды в математике
- Дифференциальные уравнения с примерами
- Обратная матрица — определение и нахождение
- Ранг матрицы — определение и вычисление
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Структура общего решения системы уравнений
Однородная система линейных уравнений
всегда совместна, так как имеет тривиальное решение . Если ранг матрицы системы равен количеству неизвестных , то тривиальное решение единственное. Предположим, что . Тогда однородная система имеет бесконечно много решений. Заметим, что расширенная матрица однородной системы при элементарных преобразованиях строк приводится к упрощенному виду , т.е. . Поэтому из (5.11) получаем общее решение однородной системы уравнений :
Получим другую форму записи решений однородной системы, которая раскрывает структуру множества решений. Для этого подчеркнем следующие свойства.
Свойства решений однородной системы уравнений
1. Если столбцы — решения однородной системы уравнений, то любая их линейная комбинация также является решением однородной системы.
В самом деле, из равенств следует, что
т.е. линейная комбинация решений является решением однородной системы.
2. Если ранг матрицы однородной системы равен , то система имеет линейно независимых решений.
Действительно, по формулам (5.13) общего решения однородной системы найдем частных решений , придавая свободным переменным следующие стандартные наборы значений (всякий раз полагая, что одна из свободных переменных равна единице, а остальные — равны нулю):
которые линейно независимы. В самом деле, если из этих столбцов составить матрицу, то последние ее строк образуют единичную матрицу. Следовательно, минор, расположенный в последних строках не равен нулю (он равен единице), т.е. является базисным. Поэтому ранг матрицы будет равен . Значит, все столбцы этой матрицы линейно независимы (см. теорему 3.4).
Любая совокупность линейно независимых решений однородной системы называется фундаментальной системой (совокупностью) решений .
Заметим, что фундаментальная система решений определяется неоднозначно. Однородная система может иметь разные фундаментальные системы решений, состоящие из одного и того же количества линейно независимых решений.
Теорема 5.3 об общем решении однородной системы. Если — фундаментальная система решений однородной системы уравнений (5.4), то столбец
при любых значениях произвольных постоянных также является решением системы (5.4), и, наоборот, для каждого решения х этой системы найдутся такие значения произвольных постоянных , при которых это решение удовлетворяет равенству (5.14).
Прямое утверждение теоремы следует из свойства 1 решений однородной системы. Докажем обратное утверждение о том, что любое решение можно представить в виде (5.14). Для этого составим матрицу , приписав к столбцам фундаментальной системы решений столбец
Найдем ранг этой матрицы. Так как первые столбцов линейно независимы, то . Так как каждый из столбцов матрицы является решением системы , то по первой формуле из (5.13) получаем
Следовательно, первая строка матрицы является линейной комбинацией последних строк этой матрицы.
По второй формуле из (5.13) получим, что вторая строка матрицы является линейной комбинацией последних строк этой матрицы, и т.д. По r-й формуле из (5.13) получим, что r-я строка матрицы является линейной комбинацией последних строк этой матрицы. Значит, первые строк матрицы можно вычеркнуть и при этом ранг матрицы не изменится. Следовательно, , так как после вычеркивания в матрице будет всего строк. Таким образом, . Значит, есть базисный минор матрицы , который расположен в первых ее столбцах, а столбец не входит в этот базисный минор. Тогда по теореме о базисном миноре найдутся такие числа , что
Итак, обратное утверждение доказано.
Алгоритм решения однородной системы уравнений
1-5. Выполнить первые 5 пунктов алгоритма Гаусса. При этом не требуется выяснять совместность системы, так как любая однородная система имеет решение (пункт 3 метода Гаусса следует пропустить). Получить формулы (5.11) общего решения, которые для однородной системы будут иметь вид (5.13).
Если ранг матрицы системы равен числу неизвестных , то система имеет единственное тривиальное решение и процесс решения заканчивается.
Если ранг матрицы системы меньше числа неизвестных , то система имеет бесконечно много решений. Структуру множества решений находим в следующих пунктах алгоритма.
6. Найти фундаментальную систему решений однородной системы. Для этого подставить в (5.13) последовательно стандартных наборов значений свободных переменных, в которых все свободные переменные равны нулю, кроме одной, равной единице (см. свойство 2 решений однородной системы).
7. Записать общее решение однородной системы по формуле (5.14).
1. В пункте 6 алгоритма вместо стандартного набора значений свободных переменных можно использовать и другие наборы значений, лишь бы они обеспечивали линейную независимость получаемых частных решений однородной системы.
2. Матрица столбцы которой образуют фундаментальную систему решений однородной системы, называется фундаментальной. Используя фундаментальную матрицу, общее решение (5.14) однородной системы можно записать в виде
3. Если базисный минор матрицы расположен в левом верхнем углу (в первых строках и первых столбцах), то упрощенный вид расширенной матрицы (5.9) однородной системы можно представить в виде блочной матрицы
Тогда блочная матрица размеров является фундаментальной. В этом можно убедиться, используя стандартные наборы значений свободных переменных. Применение блочных матриц может служить вторым способом нахождения фундаментальной системы решений.
Пример 5.4. Найти фундаментальную систему решений и общее решение однородной системы
Решение. 1. Составляем расширенную матрицу системы
2-4. Используя элементарные преобразования над строками матрицы , приводим ее к ступенчатому, а затем и к упрощенному виду (см. решение примера 5.3):
Пункт 3 метода Гаусса пропускаем.
5. Переменные — базисные, а — свободные. Записываем формулу (5.13) общего решения однородной системы
6. Находим фундаментальную систему решений. Так как и , надо подобрать линейно независимых решения. Подставляем в систему стандартные наборы значений свободных переменных:
В результате получили фундаментальную систему решений
7. Записываем общее решение однородной системы по формуле (5.14):
Заметим, что фундаментальную систему решений можно получить, взяв иные наборы значений свободных переменных. Например, и . Тогда получим другую фундаментальную систему решений
Несмотря на различия, обе формулы задают одно и то же множество решений.
Структура общего решения неоднородной системы уравнений
Ранее была выведена формула (5.11) общего решения системы линейных уравнений. Получим другую форму записи, отражающую структуру множества решений.
Рассмотрим неоднородную систему и соответствующую ей однородную систему . Между решениями этих систем имеются связи, выражающиеся следующими свойствами.
Свойства решений неоднородной системы уравнений
1. Разность двух решений и неоднородной системы есть решение однородной системы.
Действительно, из равенств и следует, что .
2. Пусть — решение неоднородной системы. Тогда любое решение неоднородной системы можно представить в виде
В самом деле, для любого решения неоднородной системы разность по свойству 1 является решением однородной системы, т.е. — решение однородной системы.
Теорема 5.4 о структуре общего решения неоднородной системы.
Пусть — решение неоднородной системы, а — фундаментальная система решений соответствующей однородной системы уравнений. Тогда столбец
при любых значениях [i]произвольных постоянных является решением неоднородной системы, и, наоборот, для каждого решения этой системы найдутся такие значения произвольных постоянных , при которых это решение удовлетворяет равенству (5.15).[/i]
Говорят, что общее решение неоднородной системы есть сумма частного решения неоднородной системы и общего решения соответствующей однородной системы.
Доказательство теоремы вытекает из свойств 1, 2 и теоремы 5.3.
Алгоритм решения неоднородной системы уравнений
1-5. Выполнить первые 5 пунктов метода Гаусса решения системы уравнений и получить формулу общего решения неоднородной системы вида (5.11).
6. Найти частное решение неоднородной системы, положив в (5.11) все свободные переменные равными нулю.
7. Записав формулы (5.13) общего решения соответствующей однородной системы, составить фундаментальную систему ее решений. Для этого подставить в (5.13) последовательно стандартных наборов значений свободных переменных, в которых все переменные равны нулю, за исключением одной, равной единице.
8. Записать общее решение неоднородной системы по формуле (5.15).
1. Используя фундаментальную матрицу однородной системы , решение неоднородной системы можно представить в виде
2. Если базисный минор матрицы расположен в левом верхнем углу (в первых строках и первых столбцах), то упрощенный вид расширенной матрицы (5.9) неоднородной системы можно представить в виде блочной матрицы
Тогда блочная матрица оказывается фундаментальной (см. п.3 замечаний 5.3), а столбец является частным решением неоднородной системы (в этом можно убедиться, подставляя в (5.11) нулевой набор свободных переменных). Используя блочные матрицы, общее решение (5 15) неоднородной системы можно представить в виде
где — столбец произвольных постоянных. Полученную формулу можно считать вторым способом решения неоднородной системы.
Пример 5.5. Найти структуру (5.15) общего решения неоднородной системы
Решение. 1-5. Первые 5 пунктов метода Гаусса выполнены при решении примера 5.3, где получены формулы общего решения неоднородной системы:
Переменные — базисные, а — свободные.
6. Полагая , получаем частное решение неоднородной системы .
7. Находим фундаментальную систему решений однородной системы (см. пример 5.4):
8. Записываем по формуле (5.15) общее решение неоднородной системы
Искомая структура множества решений найдена.
Получим формулу общего решения вторым способом , используя п.2 замечаний 5.4. При решении примера 5.3 расширенная матрица системы была приведена к упрощенному виду. Разбиваем ее на блоки:
Записываем частное решение неоднородной системы
и составляем фундаментальную матрицу:
По формуле (5.16) получаем общее решение неоднородной системы, которое преобразуем к виду (5.15):
http://www.evkova.org/opredeliteli-vtorogo-i-tretego-poryadkov-i-ih-svojstva
http://mathhelpplanet.com/static.php?p=struktura-obshchego-resheniya-sistemy-uravnenii