Численные методы решения нелинейных уравнений. Метод хорд.
Численные методы решения нелинейных уравнений. Метод хорд.
Метод хорд ( метод также известен как Метод секущих ) один из методов решения нелинейных уравнений и основан на последовательном сужении интервала, содержащего единственный корень уравнения  . Итерационный процесс выполняется до того момента, пока не будет достигнута заданная точность
. Итерационный процесс выполняется до того момента, пока не будет достигнута заданная точность  .
.
В отличие от метода половинного деления, метод хорд предлагает, что деление рассматриваемого интервала будет выполняться не в его середине, а в точке пересечения хорды с осью абсцисс (ось — Х). Следует отметить, что под хордой понимается отрезок, который проведен через точки рассматриваемой функции по концам рассматриваемого интервала. Рассматриваемый метод обеспечивает более быстрое нахождение корня, чем метод половинного деления, при условии задания одинакового рассматриваемого интервала.
Геометрически метод хорд эквивалентен замене кривой  хордой, проходящей через точки
хордой, проходящей через точки  и
и  (см. рис.1.).
(см. рис.1.).

Рис.1. Построение отрезка (хорды) к функции  .
.
Уравнение прямой (хорды), которая проходит через точки А и В имеет следующий вид:

Данное уравнение является типовым уравнением для описания прямой вы декартовой системе координат. Наклон кривой задается по ординате и абсциссе с помощью значений в знаменателе  и
и  , соответственно.
, соответственно.
Для точки пресечения прямой с осью абсцисс  записанное выше уравнение перепишется в следующем виде:
записанное выше уравнение перепишется в следующем виде:

В качестве нового интервала для прохождения итерационного процесса выбираем один из двух  или
или  , на концах которого функция принимает значения разных знаков. Противоположность знаков значений функции на концах отрезка можно определить множеством способов. Один из множества этих способов — умножение значений функции на концах отрезка и определение знака произведения путём сравнения результата умножения с нулём:
, на концах которого функция принимает значения разных знаков. Противоположность знаков значений функции на концах отрезка можно определить множеством способов. Один из множества этих способов — умножение значений функции на концах отрезка и определение знака произведения путём сравнения результата умножения с нулём:
 или
или  .
.
Итерационный процесс уточнения корня заканчивается, когда условие близости двух последовательных приближений станет меньше заданной точности, т.е.
 .
.

Рис.2. Пояснение к определению погрешности расчета.
Следует отметить, что сходимость метода хорд линейная, однако более быстрая, чем сходимость метода половинного деления.
Алгоритм нахождения корня нелинейного уравнения по методу хорд
1. Найти начальный интервал неопределенности  одним из методов отделения корней. З адать погрешность расчета (малое положительное число ) и начальный шаг итерации (
одним из методов отделения корней. З адать погрешность расчета (малое положительное число ) и начальный шаг итерации (  ) .
) .
2. Найти точку пересечения хорды с осью абсцисс:

3. Необходимо найти значение функции в точках  ,
,  и
и  . Далее необходимо проверить два условия:
. Далее необходимо проверить два условия:
— если выполняется условие  , то искомый корень находится внутри левого отрезка положить
, то искомый корень находится внутри левого отрезка положить  ,
,  ;
;
— если выполняется условие  , то искомый корень находится внутри правого отрезка принять
, то искомый корень находится внутри правого отрезка принять  ,
,  .
.
В результате находится новый интервал неопределенности, на котором находится искомых корень уравнения:

4. Проверяем приближенное значение корня уравнения на предмет заданной точности, в случае:
— если разность двух последовательных приближений станет меньше заданной точности , то итерационный процесс заканчивается. Приближенное значение корня определяется по формуле:

— если разность двух последовательных приближений не достигает необходимой точности  , то необходимо продолжить итерационный процесс
, то необходимо продолжить итерационный процесс  и перейти к п.2 рассматриваемого алгоритма.
и перейти к п.2 рассматриваемого алгоритма.
Пример решения уравнений методом хорд
В качестве примера, рассмотрим решение нелинейного уравнения  методом хорд. Корень необходимо найти в рассматриваемом диапазоне
методом хорд. Корень необходимо найти в рассматриваемом диапазоне  с точностью
с точностью  .
.
Вариант решения нелинейного уравнения в программном комплексе MathCAD .

Результаты расчетов, а именно динамика изменения приближенного значения корня, а также погрешности расчета от шага итерации представлены в графической форме (см. рис.1).

Рис.1. Результаты расчета по методу хорд
Для обеспечения заданной точности при поиске уравнения в диапазоне необходимо выполнить 6 итераций. На последнем шаге итерации приближенное значение корня нелинейного уравнения будет определяться значением:  .
.
Примечание:
Модификацией данного метода является метод ложного положения ( False Position Method ), который отличается от метода секущих только тем, что всякий раз берутся не последние 2 точки, а те точки, которые находятся вокруг корня.


Следует отметить, что в случае если от нелинейной функции можно взять вторую производную  алгоритм поиска может быть упрощен. Предположим, что вторая производная сохраняет постоянный знак, и рассмотрим два случая:
алгоритм поиска может быть упрощен. Предположим, что вторая производная сохраняет постоянный знак, и рассмотрим два случая:
Случай №1:  0,
0,
f»(a)>0″ width=»158″ height=»20″ border=»0″ />
Из первого условия получается, что неподвижной стороной отрезка является – сторона a .
Случай №2:  0″ width=»158″ height=»20″ border=»0″ />
0″ width=»158″ height=»20″ border=»0″ />
Из второго условия получается, что неподвижной стороной отрезка является – сторона b .
В общем виде, для выявления неподвижного конца можно записать следующее условие:  0″ width=»122″ height=»20″ border=»0″ /> , где
0″ width=»122″ height=»20″ border=»0″ /> , где  или
или  .
.

Рис. 3. Примеры убывающей или возрастающей функции
Таким образом, в зависимости от вида функции получаются два выражения для упрощения поиска корня функции:
— если функция соответствует первому случаю (см. рис. 3), тогда формула будет иметь следующий вид:

 , где k =0,1,2,…
, где k =0,1,2,…
— если функция соответствует второму случаю (см. рис. 3), тогда формула будет иметь следующий вид:

 , где k =0,1,2,…
, где k =0,1,2,…
Случай  сводится к рассматриваемому , если уравнение записать в форме:
сводится к рассматриваемому , если уравнение записать в форме:  .
.
Для того, чтобы добавить Ваш комментарий к статье, пожалуйста, зарегистрируйтесь на сайте.
Программирование на C, C# и Java
Уроки программирования, алгоритмы, статьи, исходники, примеры программ и полезные советы
ОСТОРОЖНО МОШЕННИКИ! В последнее время в социальных сетях участились случаи предложения помощи в написании программ от лиц, прикрывающихся сайтом vscode.ru. Мы никогда не пишем первыми и не размещаем никакие материалы в посторонних группах ВК. Для связи с нами используйте исключительно эти контакты: vscoderu@yandex.ru, https://vk.com/vscode
Метод хорд
Метод хорд используется для численного нахождения приближенного значения корня нелинейного уравнения. В данной статье будет показан алгоритм метода, а также будет приведена его программная реализация на языках: Си, C# и Java.
Метод хорд (то же, что метод секущих) — итерационный метод решения нелинейного уравнения.
Нелинейное уравнение — это уравнение в котором есть хотя бы один член, включающий неизвестное, НЕ в первой степени. Обозначается, как: f(x) = 0.
Метод хорд. Алгоритм
Метод хорд является итерационным алгоритмом, таким образом решение уравнения заключается в многократном повторении этого алгоритма. Полученное в результате вычислений решение является приближенным, но его точность можно сделать такой, какой требуется, задав нужное значение погрешности ε. В начале вычислений методом хорд требуется указать границы области поиска корня; в общем случае эта граница может быть произвольной.
Итерационная формула для вычислений методом хорд следующая:

Вычисления продолжаются до тех пор, пока не станет истинным выражение:
Геометрическая модель одного шага итераций метода хорд представлена на рисунке:
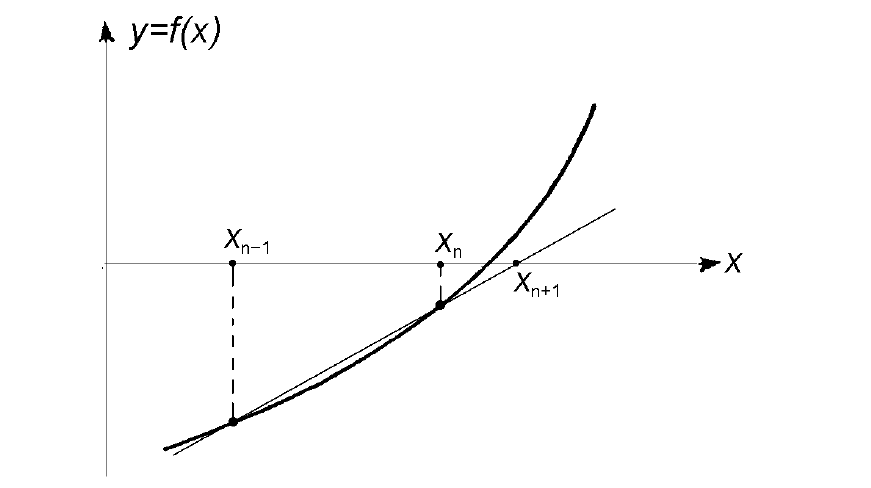
Метод хорд, в отличие от метода Ньютона, имеет плюс в том, что для расчета не требуется вычисление производных. Но при этом метод хорд медленнее, его сходимость равна золотому сечению:
Метод хорд. Программная реализация
Ниже мы приводим реализацию алгоритма метода хорд на языках программирования Си, C# и Java. Кроме того, исходники программ доступны для скачивания.
В качестве примера ищется корень уравнения x 3 — 18x — 83 = 0 в области x0 = 2, x1 = 10, с погрешностью e = 0.001. (Корень равен: 5.7051).
x_prev — это xk-1, x_curr — это xk, x_next — это xk+1.
Вычисление корней функции
Zeroin
Программа Zeroin вычисляет корень функции f(x) в заданном интервале [a,b]. Интервал должен содержать не более одного корня функции первой кратности, т.е. f(a) и f(b) должны быть разных знаков.
Для вычисления корня программа использует методы деления отрезка пополам (бисекция), при возмоожности переходит к линейной (метод секущих) или обратной квадратичной интерполяции.
Подробное описание программы «ZEROIN» можно найти в книге [Б3].
Zeroin(Fun, AX, BX, Eps)
Fun, AX, BX, Eps — входные параметры;
Real Zeroin — возвращаемое значение;
Real Fun(Real X) — исследуемая функция;
Real AX, BX — границы интервала;
Real Eps — погрешность вычисления корня.
Программа ZR10 вычисляет n корней произвольной функции f(x) при помощи изучения поведения знака функции в интервале [a,b] и дальнейшее их уточнение с точностью до Eps.
Программа «шагает» от точки a к точке b с шагом h. Если функция меняет знак, программа уточняет значение корня с точностью до Eps делением отрезка пополам (бисекция). Используется относительная погрешность (|x — xroot| / |x|) , в окрестности нуля — абсолютная погрешность |x — xroot| , а также контролируется значение функции |Fun(x)| . Не стоит брать значение Eps слишком маленьким. Полученные значения корней следует рассматривать только как приближения к точным значениям и использовать это приближение в других, более быстродействующих, программах (например Zeroin).
b может быть как больше a, так и меньше, в последнем случае программа «шагает» от больших значений аргумента к меньшим. Рекомендуется делать шаг h не больше предполагаемого минимального расстояния между корнями.
call ZR10(Fun, A, B, H, Eps, C, Cnt)
Fun, A, B, H, Eps — входные параметры;
Real Fun(Real X) — исследуемая функция;
Real A, B — границы интервала;
Real H — шаг поиска корней;
Real Eps — погрешность вычисления корня;
Real C(N) — массив, в который помещаются найденные корни;
Integer N — количество предполагаемых корней;
Integer Cnt — количество найденных корней.
Программа ZR30 вычисляет вещественные корни функции f(x) методом парабол (Мюллера).
На каждой k-ой итерации по трём точкам pk, pk+1, pk+2 строится интерполяционный полином Лагранжа L(p):

и за следуещее приближение принимается ближайший к pk+2 корень уравнения L(p)=0. Итерационный процесс продолжается, пока приближение к корню не достигнет заданной точности. Если задано начальное приближение к i-му корню ci, то за первые три точки принимаются значения p0=0.9×ci, p1=1.1×ci, p2=1.0×ci. Если ci=0, то в качестве перых трёх точек принимается -1, 1 и 0.
Для облегчения вычислений в программе вводятся следующие переменные:

За новую независимую переменную принимается dk. Тогда корни уравнения L(dk)=0 будут равны

Знак перед фигурной скобкой выбирается так, чтобы модуль знаменателя был наибольшим. Следующая точка в последовательности будет равна
На каждом шаге вычисляется соотношение | F(pk+1) / F(pk) |. Если это соотношение уменьшается больше чем в 10 раз, то dk+1 делится пополам, а pk+1 пересчитывается с заменой dk+1 на dk+1/2 и так до тех пор, пока соотношение не стане меньше 10.
Функция f(x) может быть произвольного вида (не обязательно полином!)
[Б8]. Алгоритм 25б
call ZR30(Fun, C, Eps1, Eps2, Eps3, Eta, Max, Cnt)
Fun, Eps1, Eps2, Eps3, Eta, Max — входные параметры;
Real C[N] — входной и выходной параметр;
Real Fun(Real X) — исследуемая функция;
Real Eps1 — относительный критерий сходимости по величине промежутка, счёт прекращается, если |(pk-1 — pk-1) / pk| Real Eps2 — абсолютный критерий сходимости по значениям функции;
Real Eps3, Eta — используется для кратных корней таким образом, что если |x — ci| Integer Max — максимально допустимое количество итераций;
Real С[N] — на входе: начальные приближения для корней,
на выходе: значения найденных корней;
Integer Сnt[N] — количество итераций при вычислении корня ci.
Программа ZR40 вычисляет все корни z[1:n] полинома p(x) = a[0]*x n + . + a[n-1]*x + a[n] степени n методом Ньютона-Миели. Полином задаётся массивом коэффициентов a[i] (i=0, 1. n), где a[n] — свободный член. Полином p(x) должен иметь только вещественные корни, причём все различные (не кратные). Приближения для каждого корня уточняются путём итерации, пока для двух последовательных приближений x0 и x1 не начнёт выполняться соотношение |x1-x0| ≤ eps*|x1| . При выводе корни z[i] будут упорядочены по их величинам: z[1]>z[2]>. >z[n] .
[Б10]. Алгоритм 105б
call ZR40(A, N, Eps, Z)
A, N, Eps — входные параметры;
Integer N — степень полинома;
Real A[0:N] — коэффициенты полинома;
Real Eps — погрешность вычисления корней;
Real Z[1:N] — массив, в который помещаются найденные корни.
Программа ZR44 использует корректурные формулы Брестоу и Ньютона для нахождения всех вещественных и комплексных корней полинома. Полином p(x) = a[0]*x n + . + a[n-1]*x + a[n] задаётся массивом коэффициентов a[i] (i=0, 1. n), где a[n] — свободный член. В итерационном процессе коэффициенты полинома преобразуются делением их на среднее арифметическое, вычисляемое на каждом шаге. Метод итераций Брестоу-Ньютона почти всегда сходится с точностью до k-ой цифры либо к значению корня, либо к его обратному значению. Если совместные итерации по Ньютону и Брестоу не дают сходимости за it повторений, то требование к сходимости последовательно снижается на одну значащую цифру. Для каждого корня формируется параметр acc, который информирует о ходе итерационного процесса.
[Б8]. Алгоритм 30б
call ZR44(A, N, it, k, U, V, Acc)
A, N, it, k — входные параметры;
Integer N — степень полинома;
Real A[0:N] — коэффициенты полинома;
Integer it — максимальное количество итераций;
Integer k — желательное количество правильных значащих цифр;
Real U[1:N] — массив, содержащий вещественные части найденных корней;
Real V[1:N] — массив, содержащий мнимые части найденных корней;
Real Acc[1:N] — массив параметров, которые используются для проверки сходимости.
http://vscode.ru/prog-lessons/metod-hord.html
http://fortran-90.pvbk.spb.ru/kor.html