Решение уравнения состояния для непрерывной системы
Решение уравнения состояния для непрерывной системы
Тема: «Анализ свойств объектов и систем управления»
Здесь мы рассмотрим вопросы анализа специфических свойств объектов и систем управления, представленных векторно-матричными моделями в непрерывном времени
моделями типа «вход — выход»
а также векторно-матричными моделями в дискретном времени
Полную картину динамического поведения объектов и систем управления, как в непрерывном, так и в дискретном времени можно оценить по результатам решения уравнений состояния (4.1) или (4.3).
Общее решение уравнений состояния в непрерывном времени было выполнено при рассмотрении алгоритмов вычисления матриц состояния (Ф) и управления (Г) векторно-матричной модели непрерывного объекта в дискретном времени.
Решение уравнения состояния в дискретном времени.
Дискретная стационарная система может быть описана разностными уравнениями (4.3), если значение периода квантования для простоты записи предварительно принято равным Т=1.
Предположим, что известны начальный вектор x(k0) и входные сигналы: u(k0), u(k0+1), u(k0+2). .
Систему уравнений (4.3) можно решить просто, выполнив следующие итерации:
или для любого значения k имеем
Полученное решение (4.4) состоит из двух частей: одна зависит от начальных условий, другая является взвешенной суммой входных сигналов.
Достижимость и управляемость
При решении задач управления методами теории пространства состояний предварительно рассматриваются некоторые фундаментальные свойства динамических систем, которые не встречаются в классической теории управления, оперирующей только входными и выходными сигналами элементов рассматриваемой системы. Такими свойствами являются достижимость, управляемость и наблюдаемость. Наличие этих свойств у объектов управления позволяет рассчитывать оптимальное управление с помощью простых математических операций.
Сформулируем определения понятий достижимости и управляемости.
Определение 4.1. Состояние x(t1) линейной системы достижимо, если существует момент времени t0 t1 и такой вход, который переводит состояние системы x(t1) в состояние x(t2)=0 (начало координат), при условии, что интервал (t2 — t1) конечен.
Для непрерывных систем вида (4.1) каждое достижимое состояние управляемо. Поэтому при анализе непрерывных систем говорят только об управляемости.
Для исследования достижимости используем векторно-матричную модель объекта управления (ОУ) в дискретном времени при Т=1
Теорема 4.1. Состояние системы x(n) достижимо, если и только если ранг матрицы достижимости равен размерности пространства состояний n.
Предположим, что задано начальное состояние x(0). Тогда состояние в момент времени n ( n — порядок системы) определяется соотношением
где
Если матрица WD имеет ранг n , то можно найти n уравнений, решением которых является такой управляющий сигнал, что из начального состояния x(0) система перейдет в желаемое конечное состояние x(n).
Условия управляемости могут быть получены также из выражения (4.6). Из определения 4.2 следует, что . Тогда
Для того чтобы система была управляемой, т. е. могла быть переведена из состояния x(0) 0 с помощью входной последовательности u(0), . , u(n-1) в состояние x(n)= 0, необходимо, чтобы состояние x(0) принадлежало пространству, натянутому на векторы Векторы должны быть линейно независимы, так как в противном случае состояние x(n)= 0 не может быть достигнуто. Из этого следует:
Теорема 4.2. Состояние x(0) 0 системы (4.5) управляемо, если и только если ранг матрицы равен размерности пространства состояний n.
Очевидно, что теорема справедлива только при невырожденной матрице Ф. Известно, что ранг матрицы останется неизменным, если ее умножить на невырожденную матрицу. Поэтому, если матрицу управляемости умножить слева на Фn , получим матрицу достижимости, то есть при det (Ф ) 0
Если матрица Ф не вырождена, условия достижимости и управляемости эквивалентны.
В непрерывных системах требование достижимости совпадает с требованием управляемости. Поэтому здесь используют только понятие управляемости, заменяя его в большинстве случаев понятием достижимости.
Теорема 4.3. Состояние непрерывной системы управляемо, если и только если ранг матрицы равен размерности пространства состояний.
Дополнительно можно ввести понятие индекса управляемости системы (4.1). Индексом управляемости системы называется такое минимальное целое число y, при котором матрица Qy ,определяемая выражением , имеет ранг, равный размерности пространства состояний n. В общем случае .
Если индекс управляемости системы равен рангу матрицы Qy (y=n), в этом случае речь может идти о полной управляемости динамической системы. В противном случае (y
Вычисляются n (m-1)+1=4 определителя для матриц Q1, . Q4 порядка n=3. Матрица для расчета каждого последующего определителя формируется путем отброса первого (в матрицах Q1, . Q3) и захвата следующего столбца матрицы управляемости Qу. Если хотя бы один из определителей отличен от нуля, то система управляема. Det(Q1)= -16, значит, система, рассматриваемая в примере, управляема, и другие определители можно не вычислять.
В случае представления объекта управления моделью типа “вход — выход” (4.2) условием его управляемости является отсутствие общих корней полиномов А(s) и B(s), то есть система (4.2) управляема, если и только если алгебраические уравнения
не имеют общих корней.
Данное условие может быть проверено как непосредственным вычислением корней полиномов, так и косвенным путем.
Многочлены A(s) и B(s) передаточной функции H(s)=B(s)/A(s) имеют, по крайней мере, один общий корень, если их результант, то есть определитель порядка (m+n), det(R)=0, где матрица
Таким образом, система, описываемая передаточной функцией H(s) считается управляемой, если ее результант отличен от нуля. Результант имеет порядок m+n, где m- порядок числителя, n- порядок знаменателя.
Результант формируется следующим образом:
а) первые m строк результанта — коэффициенты полинома знаменателя ak (k=0,1. n). При этом коэффициенты rii=a0 (i=1,2. m); вправо от а0 по строке записываются коэффициенты в строке — нулевые. Общее число коэффициентов в строке — (n+m).
б) следующие n строк результанта формируются аналогично с использованием коэффициентов полинома числителя bk (k=0,1. m).
Пример. 4.2. Определим управляемость системы, представленной передаточной функцией
, det(R)=0, система не управляема!
Прямой расчет корней числителя и знаменателя дает аналогичные результаты, приведенные в табл. 4.1
Таблица 4.1. Результаты расчета корней полиномов числителя и знаменателя передаточной функции
Таким образом, числитель и знаменатель передаточной функции H(s) имеют два общих корня (-1.000, -1.414 и -1.000, 1.414). Значит, система не управляема. Изменение значений корней для этих пар в числителе или знаменателе переведет систему в ранг управляемых, а взаимное расположение корней на комплексной плоскости позволит судить о степени управляемости. Естественно, что изменение корней приведет к некоторому изменению самой передаточной функции H(s). Так, для корней числителя, приведенных ниже в таблице, передаточная функция запишется в виде (4.14)
Для осуществления управления необходимо иметь информацию о текущем состоянии системы, то есть о значениях вектора состояния x(t) в каждый момент времени. Однако некоторые из переменных состояния являются абстрактными, не имеют физических аналогов в реальной системе или же не могут быть измерены. Измеряемыми и наблюдаемыми являются физические выходные переменные y(t).
Таким образом, возникает вопрос: можно ли определить вектор состояния по измеряемому вектору выхода и вектору входа?
Определение 4.3. Состояние x(t) называется наблюдаемым, если в момент времени наблюдения t=t0 можно однозначно определить x(t0) по данным измерения входных u(t) и выходных y(t). переменных на конечном интервале времени.
Для выявления формальных условий наблюдаемости также используем модель (4.5). Действие входного сигнала считается известным, поэтому общность решения не пострадает, если предположить, что u(k) = 0, где k = 0,1, . , n-1.
Допустим, что даны y(0), y(1), . , y(n-1), тогда можно записать следующую систему уравнений:
Используя векторную запись, получим
Состояние x(0) можно получить из (4.15), если матрица наблюдаемости
Теорема 4.4. Система (4.5) наблюдаема, если и только если ранг матрицы наблюдаемости Wn равен размерности пространства состояний.
Аналогично формулируется и условие наблюдаемости для линейных непрерывных стационарных систем.
Теорема 4.5. Система (4.1) наблюдаема, если и только если ранг матрицы
равен размерности пространства состояний.
Индексом наблюдаемости системы будет называться такое минимальное целое число v, при котором матрица Qv, определяемая выражением
имеет ранг, равный n.
Если индекс показателя качества системы равен рангу матрицы Qv (v=n), можно говорить о полной наблюдаемости динамической системы. В противном случае (v
Контрольные вопросы к лекции № 4.
1. Система представлена следующей ВММ в дискретном времени
Определите состояние x(2)?
2. Система представлена следующей ВММ в дискретном времени
Определите такую управляющую последовательность, что
3. Для каких систем понятия достижимости и управляемости эквивалентны?
4. Система представлена следующей ВММ в дискретном времени
Оцените достижимость, наблюдаемость и управляемость этой системы.
ОТВЕТЫ
a) для непрерывных систем;
b) для систем, представленных ВММ с невырожденной матрицей состояния;
система достижима, ненаблюдаема и управляема.
Уравнение состояния идеального газа — основные понятия, формулы и определение с примерами
Содержание:
Уравнение состояния идеального газа:
Уравнения Клапейрона и Менделеева — клапейрона; законы Шарля, Гей-Люссака, Бойля — Мариотта, Авогадро, Дальтона, — пожалуй, такого количества «именных» законов нет ни в одном разделе физики. за каждым из них — кропотливая работа в лабораториях, тщательные измерения, длительные аналитические размышления и точные расчеты. нам намного проще. Мы уже знаем основные положения теории, и «открыть» все вышеупомянутые законы нам не составит труда.
Уравнение состояния идеального газа
Давление газа полностью определяется его температурой и концентрацией молекул: p=nkT. Запишем данное уравнение в виде: pV = NkT. Если состав и масса газа известны, число молекул газа можно найти из соотношения
Произведение числа Авогадро на постоянную Больцмана k называют универсальной газовой постоянной (R): R=k 8,31 Дж/ (моль⋅К). Заменив в уравнении (*) k на R, получим уравнение состояния идеального газа (уравнение Менделеева — Клапейрона):
Обратите внимание! Состояние данного газа некоторой массы однозначно определяется двумя его макроскопическими параметрами; третий параметр можно найти из уравнения Менделеева — Клапейрона.
Уравнение Клапейрона
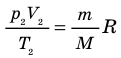
С помощью уравнения Менделеева — Клапейрона можно установить связь между макроскопическими параметрами газа при его переходе из одного состояния в другое. Пусть газ, имеющий массу m и молярную массу М, переходит из состояния () в состояние () (рис. 30.1).
Для каждого состояния запишем уравнение Менделеева — Клапейрона: Разделив обе части первого уравнения на , а второго — на , получим: . Правые части этих уравнений равны; приравняв левые части, получим уравнение Клапейрона:
Для данного газа некоторой массы отношение произведения давления на объем к температуре газа является неизменным.
Изопроцессы
Процесс, при котором один из макроскопических параметров данного газа некоторой массы остается неизменным, называют изопроцессом. Поскольку состояние газа характеризуется тремя макроскопическими параметрами, возможных изопроцессов тоже три: происходящий при неизменной температуре; происходящий при неизменном давлении; происходящий при неизменном объеме. Рассмотрим их.
Какой процесс называют изотермическим. Закон Бойля — Мариотта
Пузырек воздуха, поднимаясь со дна глубокого водоема, может увеличиться в объеме в несколько раз, при этом давление внутри пузырька падает, поскольку вследствие дополнительного гидростатического давления воды () давление на глубине больше атмосферного. Температура же внутри пузырька практически не изменяется. В данном случае имеем дело с процессом изотермического расширения.
Рис. 30.2. Изотермическое сжатие газа. Если медленно опускать поршень, температура газа под поршнем будет оставаться неизменной и равной температуре окружающей среды. Давление газа при этом будет увеличиваться
Изотермический процесс — процесс изменения состояния данного газа некоторой массы, протекающий при неизменной температуре.
Пусть некий газ переходит из состояния () в состояние (T), то есть температура газа остается неизменной (рис. 30.2). Тогда согласно уравнению Клапейрона имеет место равенство p. После сокращения на T получим: .
Закон Бойля — Мариотта:
Для данного газа некоторой массы произведение давления газа на его объем остается постоянным, если температура газа не изменяется:
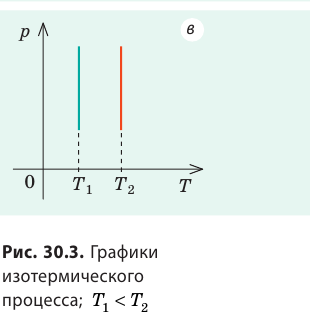
Графики изотермических процессов называют изотермами. Как следует из закона Бойля — Мариотта, при неизменной температуре давление газа данной массы обратно пропорционально его объему: . Эту зависимость в координатах p, V можно представить в виде гиперболы (рис. 30.3, а). Поскольку при изотермическом процессе температура газа не изменяется, в координатах p, T и V, T изотермы перпендикулярны оси температур (рис. 30.3, б, в).
Какой процесс называют изобарным. Закон Гей-Люссака
Изобарный процесс — процесс изменения состояния данного газа некоторой массы, протекающий при неизменном давлении.
Пусть некий газ переходит из состояния () в состояние (), то есть давление газа остается неизменным (рис. 30.4). Тогда имеет место равенство . После сокращения на p получим:
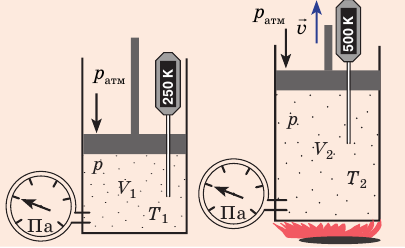
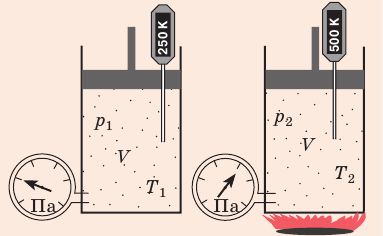
Рис. 30.4. Изобарное расширение газа. Если газ находится под тяжелым поршнем массой M и площадью S, который может перемещаться практически без трения, то при увеличении температуры объем газа будет увеличиваться, а давление газа будет оставаться неизменным и равным p
Закон Гей-Люссака
Для данного газа некоторой массы отношение объема газа к температуре остается постоянным, если давление газа не изменяется:
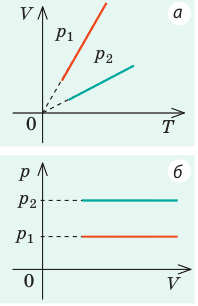
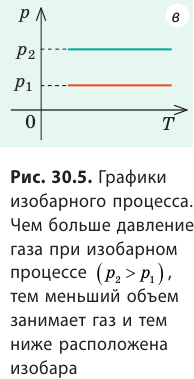
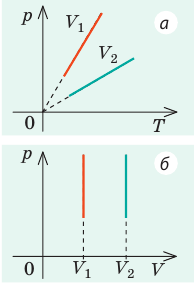
Графики изобарных процессов называют изобарами. Как следует из закона Гей-Люссака, при неизменном давлении объем газа данной массы прямо пропорционален его температуре: V = const⋅T. График данной зависимости — прямая, проходящая через начало координат (рис. 30.5, а). По графику видно, что с приближением к абсолютному нулю объем идеального газа должен уменьшиться до нуля. Понятно, что это невозможно, поскольку реальные газы при низких температурах превращаются в жидкости. В координатах p, V и p, T изобары перпендикулярны оси давления (рис. 30.5, б, в).
Изохорный процесс. Закон Шарля
Если газовый баллон сильно нагреется на солнце, давление в нем повысится настолько, что баллон может взорваться. В данном случае имеем дело с изохорным нагреванием.
Изохорный процесс — процесс изменения состояния данного газа некоторой массы, протекающий при неизменном объеме.
Пусть некий газ переходит из состояния () в состояние (), то есть объем газа не изменяется (рис. 30.6). В этом случае имеет место равенство . После сокращения на V получим:
Рис. 30.6. Изохорное нагревание газа. Если газ находится в цилиндре под закрепленным поршнем, то с увеличением температуры давление газа тоже будет увеличиваться. Опыт показывает, что в любой момент времени отношение давления газа к его температуре неизменно:
Закон Шарля
Для данного газа некоторой массы отношение давления газа к его температуре остается постоянным, если объем газа не изменяется:
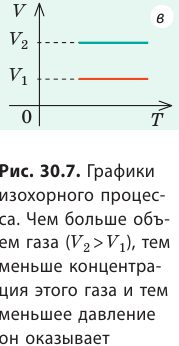
Графики изохорных процессов называют изохорами. Из закона Шарля следует, что при неизменном объеме давление газа данной массы прямо пропорционально его температуре: p T = ⋅ const . График этой зависимости — прямая, проходящая через начало координат (рис. 30.7, а). В координатах p, V и V, T изохоры перпендикулярны оси объема (рис. 30.7, б, в).
Пример №1
В вертикальной цилиндрической емкости под легкоподвижным поршнем находится 2 моль гелия и 1 моль молекулярного водорода. Температуру смеси увеличили в 2 раза, и весь водород распался на атомы. Во сколько раз увеличился объем смеси газов?
Анализ физической проблемы. Смесь газов находится под легкоподвижным поршнем, поэтому давление смеси не изменяется:, но использовать закон Бойля — Мариотта нельзя, так как вследствие диссоциации (распада) молярная масса и число молей водорода увеличились в 2 раза:
Решение:
Воспользуемся уравнением состояния идеального газа: pV = νRT. Запишем это уравнение для состояний смеси газов до и после распада: Разделив уравнение (2) на уравнение (1) и учитывая, что получим: где Найдем значение искомой величины:
Ответ: примерно в 2,7 раза.
Пример №2
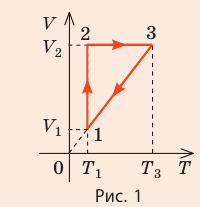
На рис. 1 представлен график изменения состояния идеального газа неизменной массы в координатах V, T. Представьте график данного процесса в координатах p, V и p, T.
Решение:
1. Выясним, какой изопроцесс соответствует каждому участку графика (рис. 1).
Зная законы, которым подчиняются эти изопроцессы, определим, как изменяются макроскопические параметры газа. Участок 1–2: изотермическое расширение; T = const, V ↑, следовательно, по закону Бойля — Мариотта p ↓. Участок 2–3: изохорное нагревание; V = const, T ↑, следовательно, по закону Шарля p ↑ . Участок 3–1: изобарное охлаждение; p = const , T ↓, следовательно, по закону Гей-Люссака V ↓ .
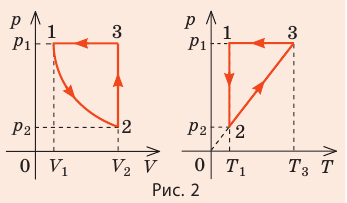
2. Учитывая, что точки 1 и 2 лежат на одной изотерме, точки 1 и 3 — на одной изобаре, а точки 2 и 3 на одной изохоре, и используя результаты анализа, построим график процесса в координатах p, V и p, T (рис. 2)
Из соотношения p=nkT можно получить ряд важных законов, большинство из которых установлены экспериментально.
Уравнение состояния идеального газа (уравнение Менделеева — Клапейрона): — универсальная газовая постоянная.
Уравнение Клапейрона:
Законы, которым подчиняются изопроцессы, то есть процессы, при которых один из макроскопических параметров данного газа некоторой массы остается неизменным:
Рекомендую подробно изучить предметы:
Физика
Атомная физика
Ядерная физика
Квантовая физика
Молекулярная физика
Ещё лекции с примерами решения и объяснением:
Температура в физике
Парообразование и конденсация
Тепловое равновесие в физике
Изопроцессы в физике
Абсолютно упругие и неупругие столкновения тел
Механизмы, работающие на основе правила моментов
Идеальный газ в физике
Уравнение МКТ идеального газа
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Уравнения состояния
При решении некоторых задач теории автоматического управления удобнее представлять дифференциальное уравнение объекта (5.1) или дифференциальные уравнения системы (5.4) и (5.6) в виде совокупности дифференциальных уравнений первого порядка. Не умаляя общности, рассмотрим эти уравнения применительно к управляемому объекту.
Пусть объект описывается дифференциальным уравнением n-го порядка (5.1)
называемых переменными состояния и представим уравнение (5.70) в виде системы дифференциальных уравнений
устанавливается алгебраическим уравнением
Обычно уравнения (5.71) и (5.72) записываются в векторпо-матричной форме:
— матрицы-столбцы. Матрицу-столбец-
могут иметь неодинаковые размерности.
В выборе переменных состояния имеется определенная свобода. Важно только, чтобы они были независимыми. От того, как выбраны переменные, зависит форма уравнений (5.73) и (5.74), т. е. вид входящих в них матриц.
При нормальной форме уравнений состояния в качестве переменных состояния выбираются сама управляемая величина \п- 1 ее производные:
т. с. когда оно имеет вид
Достоинством нормальной формы является то, что переменные состояния имеют ясный физический смысл, а некоторые из них (например, хих2 и х:]) могут быть непосредственно измерены датчиками различных типов.
Для получения уравнений состояния в канонической форме уравнение объекта (5.70) представляется в виде
Если корни рь Ръ-Рп полинома С0(р) действительные однократные, то правая часть (5.80) может быть представлена в виде суммы элементарных дробей:
где К; и ()г- — коэффициенты разложения.
В качестве неременных состояния выбираются слагаемые суммы (5.81):
Большим достоинством канонической формы является диагоиальиость матрицы Л , что существенно упрощает решение уравнения (5.73). Основной недостаток ее состоит в том, что переменные состояния не имеют ясного физического смысла, в результате чего возникает проблема их непосредственного измерения.
Существуют и другие способы выбора переменных состояния, которые здесь не рассматриваются.
Решение векторно-матричиого уравнения (5.73) может быть представлено в виде
Здесь оно без строгого доказательства построено по аналогии с решением линейного дифференциального уравнения 1-го порядка
общий интеграл которого, как известно, определяется но формуле
называется переходной или фундаментальной матрицей. Если уравнения состояния представлены в канонической форме, то матрица А диагональная и имеет вид (5.85). Тогда
При других формах уравнений состояния для определения фундаментальной матрицы можно использовать известные способы нахождения матричных функций, например, теоремы Кели—Гамильтона или Сильвестра. Можно также использовать формулу
—
При необходимости можно осуществить обратный переход от уравнений состояния к передаточным функциям объекта. Для этого уравнение (5.73) запишем в изображениях по Лапласу:
получается формула (5.88). Из уравнения
(5.74) с учетом (5.89) найдем изображение управляемой величины при нулевых начальных значениях:
При описании свойств объекта уравнениями состояния возникают две проблемы, нетипичные для случая, когда используется одно дифференциальное уравнение я-то порядка. Эти проблемы рассматриваются в следующем параграфе.


 равен размерности пространства состояний n.
равен размерности пространства состояний n.

 . Тогда
. Тогда
 0 с помощью входной последовательности u(0), . , u(n-1) в состояние x(n)= 0, необходимо, чтобы состояние x(0) принадлежало пространству, натянутому на векторы
0 с помощью входной последовательности u(0), . , u(n-1) в состояние x(n)= 0, необходимо, чтобы состояние x(0) принадлежало пространству, натянутому на векторы  Векторы должны быть линейно независимы, так как в противном случае состояние x(n)= 0 не может быть достигнуто. Из этого следует:
Векторы должны быть линейно независимы, так как в противном случае состояние x(n)= 0 не может быть достигнуто. Из этого следует: равен размерности пространства состояний n.
равен размерности пространства состояний n.
 равен размерности пространства состояний.
равен размерности пространства состояний. .
.







 на постоянную Больцмана k называют универсальной газовой постоянной (R): R=
на постоянную Больцмана k называют универсальной газовой постоянной (R): R= k 8,31 Дж/ (моль⋅К). Заменив в уравнении (*)
k 8,31 Дж/ (моль⋅К). Заменив в уравнении (*)  k на R, получим уравнение состояния идеального газа (уравнение Менделеева — Клапейрона):
k на R, получим уравнение состояния идеального газа (уравнение Менделеева — Клапейрона):
 ) в состояние (
) в состояние ( ) (рис. 30.1).
) (рис. 30.1).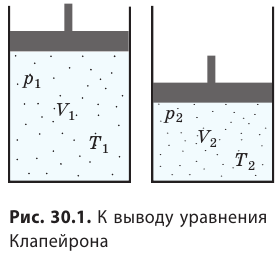
 Разделив обе части первого уравнения на
Разделив обе части первого уравнения на  , а второго — на
, а второго — на  , получим:
, получим: 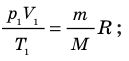
 . Правые части этих уравнений равны; приравняв левые части, получим уравнение Клапейрона:
. Правые части этих уравнений равны; приравняв левые части, получим уравнение Клапейрона: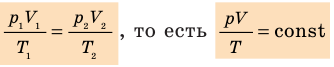
 ) давление на глубине больше атмосферного. Температура же внутри пузырька практически не изменяется. В данном случае имеем дело с процессом изотермического расширения.
) давление на глубине больше атмосферного. Температура же внутри пузырька практически не изменяется. В данном случае имеем дело с процессом изотермического расширения.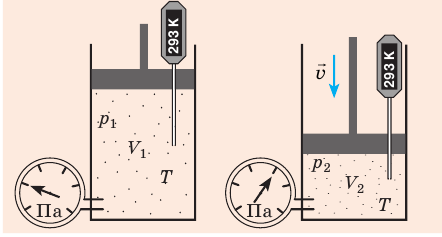
 ) в состояние (
) в состояние (
 T), то есть температура газа остается неизменной (рис. 30.2). Тогда согласно уравнению Клапейрона имеет место равенство p
T), то есть температура газа остается неизменной (рис. 30.2). Тогда согласно уравнению Клапейрона имеет место равенство p . После сокращения на T получим:
. После сокращения на T получим:  .
.
 . Эту зависимость в координатах p, V можно представить в виде гиперболы (рис. 30.3, а). Поскольку при изотермическом процессе температура газа не изменяется, в координатах p, T и V, T изотермы перпендикулярны оси температур (рис. 30.3, б, в).
. Эту зависимость в координатах p, V можно представить в виде гиперболы (рис. 30.3, а). Поскольку при изотермическом процессе температура газа не изменяется, в координатах p, T и V, T изотермы перпендикулярны оси температур (рис. 30.3, б, в).
 ) в состояние (
) в состояние ( ), то есть давление газа остается неизменным (рис. 30.4). Тогда имеет место равенство
), то есть давление газа остается неизменным (рис. 30.4). Тогда имеет место равенство  . После сокращения на p получим:
. После сокращения на p получим: 

 ) в состояние (
) в состояние ( ), то есть объем газа не изменяется (рис. 30.6). В этом случае имеет место равенство
), то есть объем газа не изменяется (рис. 30.6). В этом случае имеет место равенство 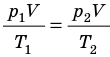 . После сокращения на V получим:
. После сокращения на V получим: 


 , но использовать закон Бойля — Мариотта нельзя, так как вследствие диссоциации (распада) молярная масса и число молей водорода увеличились в 2 раза:
, но использовать закон Бойля — Мариотта нельзя, так как вследствие диссоциации (распада) молярная масса и число молей водорода увеличились в 2 раза: 

 Разделив уравнение (2) на уравнение (1) и учитывая, что
Разделив уравнение (2) на уравнение (1) и учитывая, что  где
где 
 Найдем значение искомой величины:
Найдем значение искомой величины: 
 — универсальная газовая постоянная.
— универсальная газовая постоянная.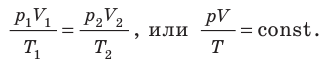


 называемых переменными состояния и представим уравнение (5.70) в виде системы дифференциальных уравнений
называемых переменными состояния и представим уравнение (5.70) в виде системы дифференциальных уравнений
 устанавливается алгебраическим уравнением
устанавливается алгебраическим уравнением

 — матрицы-столбцы. Матрицу-столбец-
— матрицы-столбцы. Матрицу-столбец- могут иметь неодинаковые размерности.
могут иметь неодинаковые размерности.
 т. с. когда оно имеет вид
т. с. когда оно имеет вид









 называется переходной или фундаментальной матрицей. Если уравнения состояния представлены в канонической форме, то матрица А диагональная и имеет вид (5.85). Тогда
называется переходной или фундаментальной матрицей. Если уравнения состояния представлены в канонической форме, то матрица А диагональная и имеет вид (5.85). Тогда

 —
—

 получается формула (5.88). Из уравнения
получается формула (5.88). Из уравнения
