iSopromat.ru

Уравнения равновесия (статики) характеризуют неподвижность заданной системы нагруженной комплексом внешних усилий.
При решении задач теоретической механики и сопротивления материалов (например, при определении опорных реакций или внутренних силовых факторов) исходя из условия неподвижности системы или ее частей, записываются уравнения равенства нулю сумм проекций всех сил на оси выбранной системы координат

что следует из условия отсутствия перемещения системы вдоль этих осей, и сумм моментов относительно произвольных точек системы

из условия отсутствия ее вращения относительно указанных осей.
Надо отметить что в случае действия плоской системы сил можно получить только три уравнения статики, а линейная схема нагружения позволяет записать лишь одно уравнение.
Пример составления уравнений равновесия
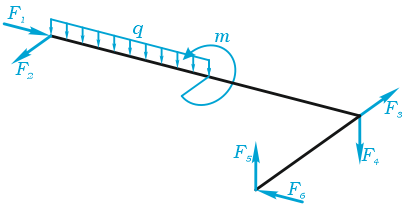
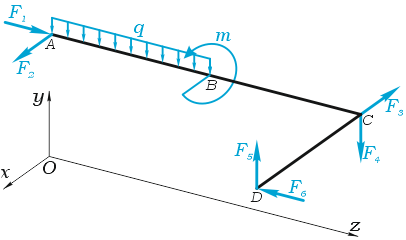
В качестве примера, рассмотрим общий случай пространственного нагружения, где комплекс усилий, включающий сосредоточенные силы F1-F6, равномерно распределенную нагрузку q, и момент m расположенный в плоскости перпендикулярной длинному стержню, удерживает L-образную систему в равновесии.
Обозначим характерные точки системы буквами A, B, C и D, зададим положение трехмерной системы координат xyz и запишем уравнения равновесия.
Суммы проекций сил
Сумма проекций всех сил на ось x (с учетом правила знаков для сил):

здесь при записи силы от распределенной нагрузки ее интенсивность q умножается на ее длину AB.
Суммы моментов
Суммы моментов всех нагрузок, например, относительно точки B (с учетом правила знаков для моментов):
- в плоскости xOy:

- в плоскости xOz:
- в плоскости yOz:



Из полученных шести уравнений можно определить не более шести неизвестных усилий.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Равновесие произвольной пространственной системы сил – решение задачи
![]()
Порядок решения задач на равновесие с произвольной пространственной системой сил
Чтобы решить задачу на равновесие твердого тела с произвольной пространственной системой сил, надо выбрать прямоугольную систему координат и, относительно нее, составить уравнения равновесия.
Уравнения равновесия, для произвольной системы сил, распределенных в трехмерном пространстве, представляют собой два векторных уравнения:
векторная сумма сил, действующих на тело, равна нулю
(1) ;
векторная сумма моментов сил, относительно начала координат, равна нулю
(2) .
Пусть Oxyz – выбранная нами система координат. Спроектировав уравнения (1) и (2) на оси этой системы, получим шесть уравнений:
суммы проекций сил на оси xyz равны нулю
(1.x) ;
(1.y) ;
(1.z) ;
суммы моментов сил относительно осей координат равны нулю
(2.x) ;
(2.y) ;
(2.z) .
Здесь мы считаем, что на тело действуют n сил, включая силы реакций опор.
Пусть произвольная сила , с компонентами , приложена к телу в точке . Тогда моменты этой силы относительно осей координат определяются по формулам:
(3.x) ;
(3.y) ;
(3.z) .
Таким образом, порядок решения задачи, на равновесие с произвольной пространственной системой сил, следующий.
- Отбрасываем опоры и заменяем их силами реакций. Если опорой является стержень или нить, то сила реакции направлена вдоль стержня или нити.
- Выбираем прямоугольную систему координат Oxyz .
- Находим проекции векторов сил на оси координат, , и точек их приложения, . Точку приложения силы можно перемещать вдоль прямой, проведенной через вектор силы. От такого перемещения значения моментов не изменятся. Поэтому выбираем наиболее удобные для расчета точки приложения сил.
- Составляем три уравнения равновесия для сил (1.x,y,z).
- Для каждой силы, по формулам (3.x,y,z), находим проекции моментов силы на оси координат.
- Составляем три уравнения равновесия для моментов сил (2.x,y,z).
- Если число переменных больше числа уравнений, то задача статически неопределима. Методами статики ее решить нельзя. Нужно использовать методы сопротивления материалов.
- Решаем полученные уравнения.
Упрощение расчетов
В некоторых случаях удается упростить вычисления, если вместо уравнения (2) использовать эквивалентное условие равновесия.
Сумма моментов сил относительно произвольной оси AA′ равна нулю:
(4) .
То есть можно выбрать несколько дополнительных осей, не совпадающих с осями координат. И относительно этих осей составить уравнения (4).
Далее приводится пример, в котором удается упростить вычисления за счет соответствующего выбора осей.
Пример решения задачи на равновесие произвольной пространственной системы сил
![]()
Найти реакции стержней, поддерживающих тонкую однородную горизонтальную плиту в трехмерном пространстве. Система крепления стержней показана на рисунке. На плиту действуют: сила тяжести G; и сила P, приложенная в точке A, направленная вдоль стороны AB.
Дано:
G = 28 kН ; P = 35 kН ; a = 7,5 м ; b = 6,0 м ; c = 3,5 м .
Решение задачи
Сначала мы решим эту задачу стандартным способом, применимым для произвольной пространственной системы сил. А затем получим более простое решение, основываясь на конкретной геометрии системы, за счет выбора осей при составлении уравнений равновесия.
Решение задачи стандартным способом
Этот метод хоть и приведет нас к довольно громоздким вычислениям, но он применим для произвольной пространственной системы сил, и может применяться в расчетах на ЭВМ.
Отбросим связи и заменим их силами реакций. Связями здесь являются стержни 1–6. Вводим вместо них силы , направленные вдоль стержней. Направления сил выбираем наугад. Если мы не угадаем с направлением какой-либо силы, то получим для нее отрицательное значение.
![]()
Проводим систему координат Oxyz с началом в точке O .
Находим проекции сил на оси координат.
Для силы имеем:
.
Здесь α 1 – угол между LQ и BQ . Из прямоугольного треугольника LQB :
м ;
;
.
Силы , и параллельны оси z . Их компоненты:
;
;
.
Для силы находим:
.
Здесь α 3 – угол между QT и DT . Из прямоугольного треугольника QTD :
м ;
;
.
Для силы :
.
Здесь α 5 – угол между LO и LA . Из прямоугольного треугольника LOA :
м ;
;
.
Сила направлена по диагонали прямоугольного параллелепипеда. Она имеет следующие проекции на оси координат:
.
Здесь – направляющие косинусы диагонали AQ :
м ;
;
;
.
Выбираем точки приложения сил. Воспользуемся тем, что их можно перемещать вдоль линий, проведенных через векторы сил. Так, в качестве точки приложения силы можно взять любую точку на прямой TD . Возьмем точку T , поскольку для нее x и z — координаты равны нулю:
.
Аналогичным способом выбираем точки приложения остальных сил.
В результате получаем следующие значения компонентов сил и точек их приложений:
; (точка B );
; (точка Q );
; (точка T );
; (точка O );
; (точка A );
; (точка A );
; (точка A );
; (точка K ).
Составляем уравнения равновесия для сил. Суммы проекций сил на оси координат равны нулю.
;
;
.
Составляем уравнения равновесия для моментов сил. Суммы моментов сил относительно осей координат равны нулю.
;
;
;
В этой системе шесть уравнений и шесть неизвестных. Далее сюда можно подставить численные значения и получить решение системы, используя математическую программу вычисления системы линейных уравнений.
Но, для этой задачи, можно получить решение без использования средств вычислительной техники.
Эффективный способ решения задачи
Мы воспользуемся тем, что уравнения равновесия можно составлять не единственным способом. Можно произвольным образом выбирать систему координат и оси, относительно которых вычисляются моменты. Иногда, за счет выбора осей, можно получить уравнения, которые решаются более просто.
Воспользуемся тем, что, в равновесии, сумма моментов сил относительно любой оси равна нулю. Возьмем ось AD . Сумма моментов сил относительно этой оси равна нулю:
(П7) .
Далее заметим, что все силы, кроме пересекают эту ось. Поэтому их моменты равны нулю. Не пересекает ось AD только одна сила . Она также не параллельна этой оси. Поэтому, чтобы выполнялось уравнение (П7), сила N 1 должна равняться нулю:
N 1 = 0 .
Теперь возьмем ось AQ . Сумма моментов сил относительно нее равна нулю:
(П8) .
Эту ось пересекают все силы, кроме . Поскольку сила не параллельна этой оси, то для выполнения уравнения (П8) необходимо, чтобы
N 3 = 0 .
Теперь возьмем ось AB . Сумма моментов сил относительно нее равна нулю:
(П9) .
Эту ось пересекают все силы, кроме , и . Но N 3 = 0 . Поэтому
.
Момент от силы относительно оси равен произведению плеча силы на величину проекции силы на плоскость, перпендикулярную оси. Плечо равно минимальному расстоянию между осью и прямой, проведенной через вектор силы. Если закручивание происходит в положительном направлении, то момент положителен. Если в отрицательном – то отрицательный. Тогда
.
Отсюда
kН .
Остальные силы найдем из уравнений (П1), (П2) и (П3). Из уравнения (П2):
N 6 = 0 .
Из уравнений (П1) и (П3):
kН ;
kН
Таким образом, решая задачу вторым способом, мы использовали следующие уравнения равновесия:
;
;
;
;
;
.
В результате мы избежали громоздких расчетов, связанных с вычислениями моментов сил относительно осей координат и получили линейную систему уравнений с диагональной матрицей коэффициентов, которая сразу разрешилась.
N 1 = 0 ; N 2 = 14,0 kН ; N 3 = 0 ; N 4 = -2,3 kН ; N 5 = 38,6 kН ; N 6 = 0 ;
Знак минус указывает на то, что сила N 4 направлена в сторону, противоположную той, которая указана на рисунке.
Автор: Олег Одинцов . Опубликовано: 13-11-2017
Решение задач на уравнение равновесия
К левому концу невесомого стержня прикреплен груз массой 3 кг (см. рисунок).
Стержень расположили на опоре, отстоящей от его левого конца на 0,2 длины стержня. Чему равна масса груза, который надо подвесить к правому концу стержня, чтобы он находился в равновесии? (Ответ дайте в килограммах.)
Одним из условий равновесия стержня является то, что полный момент всех внешних сил относительно любой точки равен нулю. Рассмотрим моменты сил относительно точки опоры. Момент, создаваемый левым грузом равен  он вращает стержень против часовой стрелки. Момент, создаваемый правым грузом:
он вращает стержень против часовой стрелки. Момент, создаваемый правым грузом:  — он вращает по часовой.
— он вращает по часовой.
Приравнивая моменты, получаем, что для равновесия к правому концу стержня необходимо подвесить груз массой

Тело массой 0,2 кг подвешено к правому плечу невесомого рычага (см. рисунок).
Чему равна масса груза, который надо подвесить ко второму делению левого плеча рычага для достижения равновесия? (Ответ дайте в килограммах.)
Одним из условий равновесия стержня является то, что полный момент всех внешних сил относительно любой точки равен нулю. Рассмотрим моменты сил относительно точки опоры. Момент, создаваемый правым грузом равен  он вращает стержень по часовой стрелке. Момент, создаваемый левым грузом:
он вращает стержень по часовой стрелке. Момент, создаваемый левым грузом:  — он вращает против часовой. Приравнивая моменты, получаем, что для равновесия к левому концу стержня необходимо подвесить груз массой
— он вращает против часовой. Приравнивая моменты, получаем, что для равновесия к левому концу стержня необходимо подвесить груз массой

Под действием силы тяжести mg груза и силы F рычаг, представленный на рисунке, находится в равновесии. Вектор силы F перпендикулярен рычагу, груз на плоскость не давит. Расстояния между точками приложения сил и точкой опоры, а также проекции этих расстояний на вертикальную и горизонтальную оси указаны на рисунке.
Если модуль силы F равен 120 Н, то каков модуль силы тяжести, действующей на груз? (Ответ дайте в ньютонах.)
Одним из условий равновесия рычага является то, что полный момент всех внешних сил относительно любой точки равен нулю. Рассмотрим моменты сил относительно опоры рычага. Момент, создаваемый силой F, равен  и он вращает рычаг по часовой стрелке. Момент, создаваемый грузом относительно этой точки —
и он вращает рычаг по часовой стрелке. Момент, создаваемый грузом относительно этой точки —  он вращает против часовой. Приравнивая моменты, получаем выражение для модуля силы тяжести
он вращает против часовой. Приравнивая моменты, получаем выражение для модуля силы тяжести

Объясните, пожалуйста, почему берется расстояние 0,8м от точки опоры до mg, а не 1м.
Момент есть произведение величины силы на плечо.
См. комментарии к задачам 612 и 618
А mg случайно не надо на косинус умножить? Сила тяжести не перпендикулярно же действует
Вот исчерпывающее определение того, что такое момент силы:
Момент силы  относительно точки
относительно точки  есть векторное произведение радиус-вектора
есть векторное произведение радиус-вектора  , проведенного из точки в точку приложения силы, и вектора силы:
, проведенного из точки в точку приложения силы, и вектора силы:  . Величина момента равна, соответственно, модулю этого векторного произведения:
. Величина момента равна, соответственно, модулю этого векторного произведения:  , где
, где  — угол между векторами и . Направление момента определяется по правилу буравчика.
— угол между векторами и . Направление момента определяется по правилу буравчика.
По этому поводу уместно также посмотреть комментарии к задачам 612 и 618
Доброго времени суток.
А момент силы, связанный с реакцией опоры со стороны стола Вы не учитываете? Ведь система не подвешена в воздухе, а опирается на поверхность стола. А в этом случае даже в отсутствии силы F система будет в равновесии?
Правильное замечание. Здесь действительно не очень хорошая картинка. Конечно, считается, что рычаг не касается пола.
Если сила mg направлена под углом θ к рычагу L(=0,8м), то M = L*mg*sinθ, где θ это угол между рычагом и приложенной силой.
Этот факт в задаче упущен!
Плечо здесь 1 м, а не 0,8 м, именно учет синуса приводит к тому, что в формуле написано 0,8 м.
Сила тяжести не действует на рычаг, она приложена к грузу! А на рычаг действует ВЕС груза! Необходимо скорректировать условие задачи.
Вы правы, если рассматривать груз отдельно от рычага, то надо говорить о весе. С другой стороны, груз можно считать частью рычага как, например, у колодезных журавлей, и тогда вес и реакцию опоры можно не рассматривать.
Под действием силы тяжести mg груза и силы F рычаг, представленный на рисунке, находится в равновесии. Вектор силы F перпендикулярен рычагу, а груз на плоскость не давит. Расстояния между точками приложения сил и точкой опоры, а также проекции этих расстояний на вертикальную и горизонтальную оси указаны на рисунке.
Если модуль силы F равен 240 Н, то каков модуль силы тяжести, действующей на груз? (Ответ дайте в ньютонах.)
Одним из условий равновесия рычага является то, что полный момент всех внешних сил относительно любой точки равен нулю. Рассмотрим моменты сил относительно опоры рычага. Момент, создаваемый силой F, равен  и он вращает рычаг по часовой стрелке. Момент, создаваемый грузом относительно этой точки —
и он вращает рычаг по часовой стрелке. Момент, создаваемый грузом относительно этой точки —  он вращает против часовой. Приравнивая моменты, получаем выражение для модуля силы тяжести
он вращает против часовой. Приравнивая моменты, получаем выражение для модуля силы тяжести
http://1cov-edu.ru/mehanika/statika/ravnovesie-prostranstvennoj-sistemy-sil/
http://phys-ege.sdamgia.ru/test?theme=221