Общее уравнение динамики. Пример решения задачи
Условие задачи
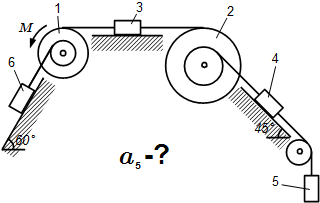
Механическая система состоит из однородных ступенчатых шкивов 1 и 2, обмотанных нитями, грузов 3-6, прикрепленных к этим нитям, и невесомого блока. Система движется в вертикальной плоскости под действием сил тяжести и пары сил с моментом M = 10 Н·м , приложенной к шкиву 1. Радиусы ступеней шкива 1 равны: R 1 = 0,2 м , r 1 = 0,1 м , а шкива 2 – R 2 = 0,3 м , r 2 = 0,15 м ; их радиусы инерции относительно осей вращения равны соответственно ρ 1 = 0,1 м и ρ 2 = 0,2 м .
Пренебрегая трением, определить ускорение груза 5. Веса шкивов и грузов заданы: P 1 = 40 Н , P 2 = 0 , P 3 = 0 , P 4 = 20 Н , P 5 = 30 Н , P 6 = 10 Н . Грузы, веса которых равны нулю, на чертеже не изображать.
Указание. При решении задачи использовать общее уравнение динамики (принцип Даламбера – Лагранжа).
Решение задачи
Дано: R 1 = 0,2 м , r 1 = 0,1 м , R 2 = 0,3 м , r 2 = 0,15 м , ρ 1 = 0,1 м , ρ 2 = 0,2 м . P 1 = 40 Н , P 2 = 0 , P 3 = 0 , P 4 = 20 Н , P 5 = 30 Н , P 6 = 10 Н , M = 10 Н·м .
Установление кинематических соотношений
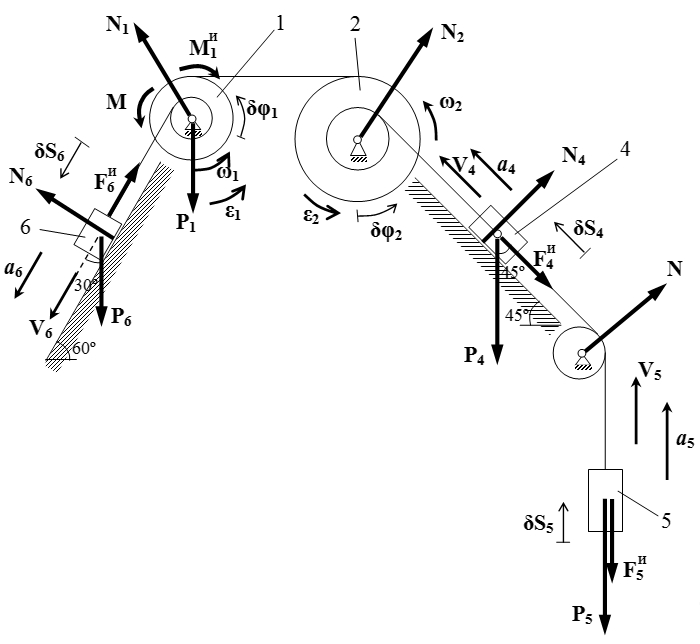
Установим кинематические соотношения. Пусть V 4 , V 5 , V 6 , a 4 , a 5 , a 6 , δS 4 , δS 5 , δS 6 – скорости, ускорения и малые перемещения грузов 4,5 и 6. Пусть ω 1 , ω 2 , ε 1 , ε 2 , δφ 1 , δφ 2 – угловые скорости, угловые ускорения и малые углы поворота шкивов 1 и 2.
Скорость движения нити между телами 2, 4 и 5:
. Отсюда .
Скорость движения нити между шкивами 1 и 2:
. Отсюда
.
Скорость движения нити между телами 1 и 6:
.
Итак, мы нашли связь между скоростями тел.
;
;
.
Поскольку ускорения – это производные скоростей по времени, ,
то дифференцируя по времени предыдущие формулы, находим связь между ускорениями:
;
;
.
Поскольку скорости – это производные от перемещений по времени, то такая же связь есть между бесконечно малыми перемещениями.
;
;
.
Активные внешние силы
Рассмотрим внешние силы, действующие на систему.
Это силы тяжести тел P 1 = 40 Н , P 4 = 20 Н , P 5 = 30 Н и P 6 = 10 Н , направленные вниз;
заданная пара сил с моментом M = 10 Н·м ;
силы давления осей N 1 , N 2 и N шкивов 1, 2 и невесомого блока;
силы реакции N 4 и N 6 , действующие на грузы со стороны поверхностей, перпендикулярные этим поверхностям.
Силы инерции
Мы будем решать эту задачу с помощью общего уравнения динамики, применяя принцип Даламбера — Лагранжа. Он заключается в том, что сначала мы вводим силы инерции. После введения сил инерции, задача динамики превращается в задачу статики. То есть нам нужно найти неизвестные силы инерции, чтобы система находилась в равновесии. Данную задачу статики мы решаем, применяя принцип Даламбера. То есть считаем, что система совершила малое перемещение. Тогда в равновесии, сумма работ всех сил, при таком перемещении, равна нулю.
Итак, на первом этапе мы вводим силы инерции. Для этого предполагаем, что система движется с некоторым, пока не определенным, ускорением. То есть шкивы 1 и 2 вращаются с угловыми ускорениями ε 1 и ε 2 , соответственно; грузы 4,5 и 6 совершают поступательное движение с ускорениями a 4 , a 5 и a 6 , соответственно. Между этими ускорениями имеются связи, которые мы нашли ранее. То есть все эти ускорения можно выразить через одно ускорение a 5 . Силы инерции определяются так, что они равны по модулю и противоположны по направлению тем силам (и моментам сил), которые, по законам динамики, создавали бы предполагаемые ускорения (при отсутствии других сил).
Определяем модули (абсолютные значения) сил и моментов инерции и выражаем их через a 5 .
Пусть – массы тел;
– момент инерции шкива 1.
Момент сил инерции, действующий на шкив 1:
.
Силы инерции, действующие на грузы 4, 5 и 6:
;
;
.
Изображаем силы инерции на чертеже учитывая, что их направления противоположны ускорениям.
Применение общего уравнения динамики
Даем системе бесконечно малое перемещение. Пусть груз 5 переместился на малое расстояние δS 5 . Тогда угол поворота δφ 1 шкива 1 и перемещения δS 4 и δS 6 грузов 4 и 6 определяются с помощью установленных ранее кинематических соотношений. Поскольку нити нерастяжимые, то они не совершают работу при таком перемещении. Это означает, что система имеет идеальные связи. Поэтому мы можем применить общее уравнение динамики:
,
согласно которому сумма работ всех активных сил и сил инерции, при таком перемещении, равна нулю.
Определение суммы работ внешних активных сил и сил инерции
Работа, которую совершает сила при перемещении точки ее приложения на малое смещение равна скалярному произведению векторов , то есть произведению модулей векторов F и ds на косинус угла между ними.
Работа, произведенная моментом сил , вычисляется аналогично:
.
Определяем работы всех активных сил и сил инерции. Поскольку центры осей шкивов 1, 2 и невесомого блока не совершают перемещений, то силы P 1 , N 1 , N 2 и N не совершают работу. Поскольку силы N 4 и N 6 перпендикулярны перемещениям грузов 4 и 6, то эти силы также не совершают работу.
Находим сумму работ остальных активных сил и сил инерции.
.
Подставляем выражения для сил инерции и применяем кинематические соотношения.
.
Сокращаем на δS 5 и преобразовываем.
.
Подставляем численные значения.
;
;
м/с 2 .
Автор: Олег Одинцов . Опубликовано: 02-08-2015
Общее уравнение динамики – теорема Даламбера-Лагранжа — решение задач по теоретической механике
Ищите кому заказать термех — пишите мне вк

Примеры моих работ: Пример2 Пример2 Пример3
Общее уравнение динамики применяется для решения задач по термеху в случаях если необходимо определит ускорение какого либо тела, или всех тел. Иногда задачи на общее уравнение динамики просят решить используя теорему Даламбера – Лагранжа, или типа того. Это одно и тоже: общее уравнение динамики и теорема Даламбера – Лагранжа. Лично я больше предпочитаю первое название. Суть общего уравнения динамики очень проста: сумма бесконечно малых работ внешних сил и сил инерции, на бесконечно малом возможном (БМВ) перемещении системы, равна нулю.
 Вход на сайт
Вход на сайтЗадачи на тему Общее уравнение динамики
Динамика:
Аналитическая механика
§ 47. Общее уравнение динамики
Задачи с решениями
47.1 Три груза массы M каждый соединены нерастяжимой нитью, переброшенной через неподвижный блок A. Два груза лежат на гладкой горизонтальной плоскости, а третий груз подвешен вертикально. Определить ускорение системы и натяжение нити в сечении ab. Массой нити и блока пренебречь.
РЕШЕНИЕ
47.2 Решить предыдущую задачу с учетом массы блока, считая, что при движении грузов блок A вращается вокруг неподвижной оси. Масса блока сплошного однородного диска равна 2M.
РЕШЕНИЕ
47.3 Два груза массы M1 и M2 подвешены на двух гибких нерастяжимых нитях, которые навернуты, как указано на рисунке, на барабаны, имеющие радиусы r1 и r2 и насаженные на общую ось; грузы движутся под влиянием силы тяжести. Определить угловое ускорение ε барабанов, пренебрегая их массами и массой нитей.
РЕШЕНИЕ
47.4 При условии предыдущей задачи определить угловое ускорение ε и натяжения T1 и T2 нитей, принимая во внимание массы барабанов, при следующих данных: M1=20 кг, M2=34 кг, r1=5 см, r2=10 см; массы барабанов: малого 4 кг и большого 8 кг. Массы барабанов считать равномерно распределенными по их внешним поверхностям.
РЕШЕНИЕ
47.5 К системе блоков, изображенной на рисунке, подвешены грузы: M1 массы 10 кг и M2 массы 8 кг. Определить ускорение w2 груза M2 и натяжение нити, пренебрегая массами блоков.
РЕШЕНИЕ
47.6 К нижнему шкиву C подъемника приложен вращающий момент M. Определить ускорение груза A массы M1, поднимаемого вверх, если масса противовеса B равна M2, а шкивы C и D радиуса r и массы M3 каждый представляют собой однородные цилиндры. Массой ремня пренебречь.
РЕШЕНИЕ
47.7 Вал кабестана механизма для передвижения грузов радиуса r приводится в движение постоянным вращающим моментом M, приложенным к рукоятке AB. Определить ускорение груза C массы m, если коэффициент трения скольжения груза о горизонтальную плоскость равен f. Массой каната и кабестана пренебречь.
РЕШЕНИЕ
47.8 Решить предыдущую задачу с учетом массы кабестана, момент инерции которого относительно оси вращения равен J.
РЕШЕНИЕ
47.9 Груз A массы M1, опускаясь по наклонной гладкой плоскости, расположенной под углом α к горизонту, приводит во вращение посредством нерастяжимой нити барабан B массы M2 и радиуса r. Определить угловое ускорение барабана, если считать барабан однородным круглым цилиндром. Массой неподвижного блока C и нити пренебречь.
РЕШЕНИЕ
47.10 Человек толкает тележку, приложив к ней горизонтальную силу F. Определить ускорение кузова тележки, если масса кузова равна M1, M2 масса каждого из четырех колес, r радиус колес, fк коэффициент трения качения. Колеса считать сплошными круглыми дисками, катящимися по рельсам без скольжения.
РЕШЕНИЕ
47.11 Каток A массы M1, скатываясь без скольжения по наклонной плоскости вниз, поднимает посредством нерастяжимой нити, переброшенной через блок B, груз C массы M2. При этом блок B вращается вокруг неподвижной оси O, перпендикулярной его плоскости. Каток A и блок B однородные круглые диски одинаковой массы и радиуса. Наклонная плоскость образует угол α с горизонтом. Определить ускорение оси катка. Массой нити пренебречь.
РЕШЕНИЕ
47.12 Груз B массы M1 приводит в движение цилиндрический каток A массы M2 и радиуса r при помощи нити, намотанной на каток. Определить ускорение груза B, если каток катится без скольжения, а коэффициент трения качения равен fк. Массой блока D пренебречь.
РЕШЕНИЕ
47.13 Стержень DE массы M1 лежит на трех катках A, B и C массы M2 каждый. К стержню приложена по горизонтали вправо сила F, приводящая в движение стержень и катки. Скольжение между стержнем и катками, а также между катками и горизонтальной плоскостью отсутствует. Найти ускорение стержня DE. Катки считать однородными круглыми цилиндрами.
РЕШЕНИЕ
47.14 Определить ускорение груза M2, рассмотренного в задаче 47.5, с учетом массы блоков сплошных однородных дисков массы 4 кг каждый.
РЕШЕНИЕ
47.15 Груз А массы M1, опускаясь вниз, посредством нерастяжимой нити, переброшенной через неподвижный блок D и намотанной на шкив B, заставляет вал C катиться без скольжения по горизонтальному рельсу. Шкив B радиуса R жестко насажен на вал C радиуса r; их общая масса равна M2, а радиус инерции относительно оси O, перпендикулярной плоскости рисунка, равен ρ. Найти ускорение груза A. Массой нити и блока пренебречь.
РЕШЕНИЕ
47.16 Центробежный регулятор вращается вокруг вертикальной оси с постоянной угловой скоростью ω. Определить угол отклонения ручек OA и OB от вертикали, принимая во внимание только массу M каждого из шаров и массу M1 муфты C, все стержни имеют одинаковую длину l.
РЕШЕНИЕ
47.17 Центробежный регулятор вращается с постоянной угловой скоростью ω. Найти зависимость между угловой скоростью регулятора и углом α отклонения его стержней от вертикали, если муфта массы M1 отжимается вниз пружиной, находящейся при α=0 в недеформированном состоянии и закрепленной верхним концом на оси регулятора; массы шаров равны M2, длина стержней равна l, оси подвеса стержней отстоят от оси регулятора на расстоянии a; массами стержней и пружины пренебречь. Коэффициент жесткости пружины равен c.
РЕШЕНИЕ
47.18 Центробежный пружинный регулятор состоит из двух грузов A и B массы M каждый, насаженных на скрепленный со шпинделем регулятора гладкий горизонтальный стержень муфты C массы M1, тяг длины l и пружин, отжимающих грузы к оси вращения; расстояние шарниров тяг от оси шпинделя равно e; c коэффициент жесткости пружин. Определить угловую скорость регулятора при угле раствора α, если при угле α0, где α0<α, пружины находятся в ненапряженном состоянии; массой тяг и трением пренебречь.
РЕШЕНИЕ
47.19 В регуляторе четыре груза одинаковой массы M1 находятся на концах двух равноплечих рычагов длины 2l, которые могут вращаться в плоскости регулятора вокруг конца шпинделя O и образуют с осью шпинделя переменный угол φ. В точке A, находящейся от конца шпинделя O на расстоянии OA=a, со шпинделем шарнирно соединены рычаги AB и AC длины a, которые в точках B и C в свою очередь сочленены со стержнями BD и CD длины a, несущими муфту D. В точках B и C имеются ползунки, скользящие вдоль рычагов, несущих грузы. Масса муфты равна M2. Регулятор вращается с постоянной угловой скоростью ω. Найти связь между углом и угловой скоростью ω в равновесном положении регулятора.
РЕШЕНИЕ
http://univer2.ru/obshee_uravnenie_dinamiki.htm
http://famiredo.ru/i/167