Численные методы решения обыкновенных дифференциальных уравнений. Метод Эйлера и методы Рунге-Кутта для решения дифференциальных уравнений
Суть метода Эйлера заключается в переходе от бесконечно малых приращений в уравнении к конечным:  (1)
(1)
т.е. в замене производной приближенным конечно-разностным отношением:
где h = ∆х — шаг интегрирования.
Отсюда  (3)
(3)
Рассматривая приближенное решение в точке  как новые начальные условия, можно по формуле (3) найти значение искомой функции у(х) в следующей точке. В общем случае формула Эйлера имеет вид:
как новые начальные условия, можно по формуле (3) найти значение искомой функции у(х) в следующей точке. В общем случае формула Эйлера имеет вид:  (4)
(4)
Метод Эйлера может быть интерпретирован геометрически следующим образом: функцию у(х) заменяют ломаной, представляющей собой отрезки касательных к этой функции в узлах (рис. 5.1).
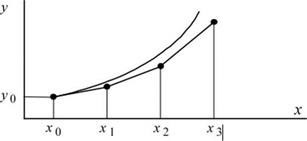
Рис. 5.1. Метод Эйлера
Достоинствами метода Эйлера являются его простота и наглядность, недостатками — относительно невысокая точность (он имеет первый порядок точности) и систематическое накопление ошибки. Точность и устойчивость решения в значительной степени зависят от величины шага интегрирования. Для оценки погрешности и выбора шага может быть применена формула Рунге  .
.
Методы Рунге-Кутта второго порядка
Методы Рунге-Кутта второго порядка основаны на разложении функции у(х) в ряд Тейлора и учете трех его первых членов (до второй производной включительно).
Метод Рунге-Кутта второго порядка с полным шагом реализуется по формуле:
 (6.1.)
(6.1.)
Его геометрическая интерпретация (рис. 6.1.) заключается в следующем:
1. Приближенно вычисляют значение функции в точке xi+h по формуле Эйлера  и наклон интегральной кривой в этой точке
и наклон интегральной кривой в этой точке 
2. Находят средний наклон на шаге h: 
3. По этому наклону уточняют значение yi+1 по формуле (6.1.).
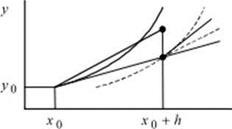 Рис. 6.1. Метод Рунге-Кутта второго порядка с полным шагом Рис. 6.1. Метод Рунге-Кутта второго порядка с полным шагом |
Формула метода Рунге-Кутта второго порядка с половинным шагомимеет вид
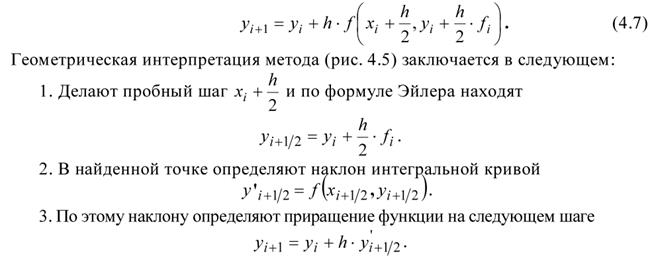

Рисунок 6.3. Метод Рунге-Кутта второго порядка с половинным шагом
Метод Рунге-Кутта четвертого порядка
Метод Рунге-Кутта решения диф. уравнений и их систем.
Метод позволяет решать системы обыкновенных дифференциальных уравнений (ОДУ) первого порядка следующего вида:

которые имеют решение:

где t — независимая переменная (например, время); X, Y и т.д. — искомые функции (зависимые от t переменные). Функции f, g и т.д. — заданы. Также предполагаются заданными и начальные условия, т.е. значения искомых функций в начальный момент.
Одно диф. уравнение — частный случай системы с одним элементом. Поэтому, далее речь пойдет для определенности о системе уравнений.
Метод может быть полезен и для решения диф. уравнений высшего (второго и т.д.) порядка, т.к. они могут быть представлены системой диф. уравнений первого порядка.
Метод Рунге-Кутта заключается в рекурентном применении следующих формул:

Реализация Метода Рунге-Кутта на Delphi может выглядеть так (привожу полностью модуль):
Модуль полностью работоспособен. Возвращаемое функцией Runge_Kutt значение — код ошибки. Вы можете дополнить список ошибок по своему усмотрению. Рассчитанные функции системы помещаются в массив Res. Чтобы не загромождать код, в модуле опущены проверки (типа блоков try). Рекомендую их добавить по своему усмотрению.
Ниже приводится описание функции Runge_Kutt и типов, использующихся в модуле.
- FunArray — вектор функций (правых частей уравнений системы);
- First, Last — начальная и конечная точки расчетного интервала;
- Steps — число шагов по расчетному интервалу;
- InitArray — вектор начальных значений
- var Res — матрица результатов включая независимую переменную.
В модуле описаны типы:
Функция возвращает коды ошибок:
- 0 — нет ошибок;
- 100 — число уравнений не равно числу начальных условий.
Решение содержится в переменной-матрице Res. Первый индекс матрицы относится к переменной (0 — независимая переменная, 1 — первая зависимая и т.д.), второй — к номеру расчетной точки (0 — начальная точка).
Рассмотрим один пример использования модуля. Создадим новое приложение и подключим к нему модуль. На форме приложения разместим кнопку Button1 и область текста Memo1. Поместим в приложение две функции и обработчик нажатия кнопки:
Нажатие кнопки приведет к расчету точек системы, которые будут выведены в текстовую область.
Модуль с примером и справкой можно скачать бесплатно по адресу RK.zip (ZIP, 15,3Kb) (русский вариант). Английский вариант (условно-бесплатный) можно скачать по адресу RK_Eng.zip (ZIP, 23.4Kb)
Ссылки
- http://sadovoya.narod.ru/RK.zip (русский вариант).
- http://sintreseng.narod.ru/RK_Eng.zip (английский, условно-бесплатный вариант)
Оставить комментарий
Комментарии




Скачала по Вашей ссылке русский вариант, изменила для своей системы диф. уравнений, но при запуске выдаёт ошибку :
Project Ex.exe raised exception class EOverflow with message ‘ Floating point overflow ‘
Помогите, пожалуйста .
Вот изменённый мною модуль:
unit Unit1;
interface
uses
SysUtils, Forms, StdCtrls, Controls, Classes, Dialogs, Math;
type
TForm1 = class(TForm)
Memo1: TMemo;
rk_But: TButton;
procedure rk_ButClick(Sender: TObject);
private
< Private declarations >
public
< Public declarations >
end;
var
Form1: TForm1;
pn,k,ro,Pzv: Extended;
implementation
uses rk_method, Windows;
<$R *.dfm>
procedure Syst (var t: TFloat; var X: TFloatVector;
var RP: TFloatVector);
const
fdr1=0.503;
fdr2=0.503;
fdr3=0.196;
W1=179.8928;
W2=3773.8568;
W3=2504.1203;
b1=55.9203;
b2=98.6;
b3=98.6;
Ls1=3.78;
Ls2=9;
Ls3=15.3;
Svidj2=1352.438;
Svidj3=1352.438;
my=0.62;
vk=30;
m=1.2;
L1=30.969;
L2=42.131;
delta1=0;
begin
pn:=2.5*Power(10,4);
k:=6*Power(10,-7);
ro:=8.5*Power(10,-7);
Pzv:=3.919*Power(10,7);
RP[0] := (1/(k*W1))*(my*fdr1*sqrt(2/ro)*sqrt(Abs(pn-X[0]))-my*fdr2*sqrt(2/ro)*sqrt(Abs(X[0]-X[1]))-(delta1*delta1*delta1*b1)/(12*ro*vk*Ls1)*X[0]); // dp1/dt
RP[1] := (1/(k*W2))*(my*fdr2*sqrt(2/ro)*sqrt(Abs(X[0]-X[1]))-my*fdr3*sqrt(2/ro)*sqrt(Abs(X[1]-X[2]))-(X[4]*X[4]*X[4]*b2)/(12*ro*vk*Ls2)*X[1]); // dp2/dt
RP[2] := (1/(k*W3))*(my*fdr3*sqrt(2/ro)*sqrt(Abs(X[1]-X[2]))-(X[6]*X[6]*X[6]*b3)/(12*ro*vk*Ls3)*X[2]); // dp3/dt;
RP[3] := (((Svidj2*X[1]*(L1+L2))/L1)-Pzv)*(2/m); // dv2/dt
RP[4] := X[3]; // d delta2/dt
RP[5] := (((Svidj3*X[2]*(L1+L2))/L2)-Pzv)*(2/m); // dv3/dt
RP[6] := X[5]; // d delta3/dt
end;
procedure TForm1.rk_ButClick(Sender: TObject);
var
I, t1, t2: Cardinal;
tOut, InitConds: TFloatVector;
XOuts: TFloatMatrix;
Points: Cardinal;
First, Last: TFloat;
StepsFact: Cardinal;
Count: Word;
begin
Memo1.Clear;
First := 0.0;
Last := 10.0;
Count:= 7;
Points:=10+1; //11 points for output
StepsFact:=1000000; //all steps inside function = 10*StepsFact
try
SetLength(InitConds, Count);
InitConds[0]:=0.0; //x0(0)=0
InitConds[1]:=0.0; //x1(0)=0
InitConds[2]:=0.0; //x2(0)=0
InitConds[3]:=0.0; //x3(0)=0
InitConds[4]:=0.0; //x4(0)=0
InitConds[5]:=0.0; //x5(0)=0
InitConds[6]:=0.0; //x6(0)=0
SetLength(tOut, Points);
SetLength(XOuts, Count, Points);
except
ShowMessage(‘Out of memory. ‘);
exit;
end;
Решить дифференциальное уравнение второго порядка методом рунге кутта
Системой дифференциальных уравнений называется система вида

где x — независимый аргумент,
yi — зависимая функция,  ,
,
Функции yi(x), при подстановке которой система уравнений обращается в тождество, называется решением системой дифференциальных уравнений.
Численные методы решения систем дифференциальных уравнений.
Модифицированный метод Эйлера.
Метод Рунге-Кутта четвертого порядка.
Дифференциальным уравнением второго порядка называется уравнение вида
| F(x,y,у’,y»)=0 | (1) |
| y»=f(x,y,y’). | (2) |
Функция y(x), при подстановке которой уравнение обращается в тождество, называется решением дифференциального уравнения.
Численно ищется частное решение уравнения (2), которое удовлетворяет заданным начальным условиям, то есть решается задача Коши.
Для численного решения дифференциальное уравнение второго порядка преобразуется в систему двух дифференциальных уравнений первого порядка и приводится к машинному виду (3). Для этого вводится новая неизвестная функция  , слева в каждом уравнении системы оставляют только первые производные неизвестных функций, а в правых частях производных быть не должно
, слева в каждом уравнении системы оставляют только первые производные неизвестных функций, а в правых частях производных быть не должно
 . . | (3) |
Функция f2(x, y1, y) в систему (3) введена формально для того, чтобы методы, которые будут показаны ниже, могли быть использованы для решения произвольной системы дифференциальных уравнений первого порядка. Рассмотрим несколько численных методов решения системы (3). Расчетные зависимости для i+1 шага интегрирования имеют следующий вид. Для решения системы из n уравнений расчетные формулы приведены выше. Для решения системы из двух уравнений расчетные формулы удобно записать без двойных индексов в следующем виде:
Метод Рунге-Кутта четвертого порядка.
где h — шаг интегрирования. Начальные условия при численном интегрировании учитываются на нулевом шаге: i=0, x=x0, y1=y10, y=y0.
Контрольное задание по зачетной работе.
Колебания с одной степенью свободы
Цель. Изучение численных методов решения дифференциальных уравнений второго порядка и систем дифференциальных уравнений первого порядка.
Задание. Численно и аналитически найти:
- закон движения материальной точки на пружинке х(t),
- закон изменения силы тока I(t) в колебательном контуре (RLC — цепи) для заданных в табл.1,2 режимов. Построить графики искомых функций.
Свободные незатухающие колебания
Затухающее колебательное движение
Предельное апериодическое движение
Вынужденное колебание без сопротивления
Вынужденное колебание без сопротивления, явление резонанса
Вынужденное колебание с линейным сопротивлением
Вынужденное колебание с линейным сопротивлением, явление резонанса
http://codenet.ru/progr/alg/Runge-Kutt-Method/
http://toehelp.ru/theory/informat/lecture14.html