Сферическое движение твердого тела в теоретической механике
Содержание:
Сферическое движение твердого тела:
Сферическим называют такое движение твердого тела, при котором точки тела описывают траектории, лежащие на сферах с одним и тем же неподвижным центром
Вращение тела вокруг точки
Пусть во время движения тела одна из его точек остается неподвижной. Тогда всякая другая точка тела может двигаться только по поверхности сферы, описанной вокруг неподвижной точки радиусом, равным расстоянию этой точки от неподвижной. Такое движение называют сферическим движением тела, или вращением вокруг неподвижной точки.
Положение тела, имеющего неподвижную точку, можно определить тремя независимыми углами
Углы Эйлера
Чтобы определить положение тела, имеющего неподвижную точку, построим две системы координатных осей с общим началом в этой точке О: основную xOyz и подвижную x’Oy’z’, неизменно связанную с движущимся телом (рис. 107). Три оси подвижной системы составляют 9 углов с тремя осями основной, но для определения положения тела, имеющего неподвижную точку, нет необходимости знать все 9 направляющих косинусов, так как они связаны известными из аналитической геометрии соотношениями, и независимых величин остается только три.
Положение тела, имеющего неподвижную точку, можно определить тремя независимыми углами. Эти углы обычно называют эйлеровыми.1 Ознакомимся с углами, предложенными Эйлером и применяемыми в астрономии, в гироскопии и во многих других науках.
Линией узлов называют линию ON пересечения плоскостей xОy и х’Оу’ основной и подвижной систем. Первый угол — угол прецессии ψ—лежит в плоскости хОу между неподвижной осью Ox и линией узлов. Его измеряют от оси Ox к оси ON против хода часов, если смотреть с оси Oz.
Второй—угол собственного вращения φ—лежит в плоскости х’Оу’ и его отмеривают от линии узлов до оси Ox’ против хода часовой стрелки, если смотреть с оси Oz’. Третий — угол
Во время движения тела эти углы изменяются. Чтобы задать уравнение сферического движения, надо представить их как некоторые непрерывные однозначные функции времени:

Предельное положение такой оси, вокруг которой следует повернуть твердое тело на бесконечно малый угол, чтобы перевести его из одного положения в другое, бесконечно близкое первому, называют мгновенной осью вращения
Мгновенная ось вращения
Положение тела в пространстве можно определить различными способами. В частности, для этого можно задать положение трех его точек. Применим этот способ для изучения сферического движения тела. За одну из этих точек примем неподвижную точку О (рис. 108, а), а две другие, А и В, выберем произвольно, но с условием, чтобы их скорости не были параллельны между собой.
Рассмотрим сначала точку А. Проведем прямую через точку А и неподвижную точку О. Согласно основной теореме кинематики твердого тела (77) проекции скоростей точек А и Q на АО должны быть равны. Но скорость точки О, а потому и ее проекция равны нулю. Скорость точки А нулю не равна, но проекция ее на ЛО должна равняться нулю, следовательно, скорость точки А перпендикулярна к АО. Если мы проведем через точки А и О плоскость (рис. 108, б) перпендикулярно к скорости точки А, то по той же теореме скорости точек этой плоскости должны быть перпендикулярны к прямым, соединяющим эти точки с неподвижной точкой О, т. е. перпендикулярны плоскости.
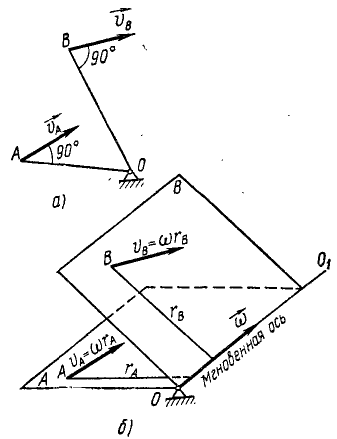
Рис. 108
Рассмотрим теперь точку В и повторим те же рассуждения. Если мы проведем через точки В и О плоскость В перпендикулярно к скорости точки В, то скорости точек этой плоскости должны быть перпендикулярны к плоскости В. Точки, лежащие на линии OO1 пересечения плоскостей А и В, должны иметь скорости, перпендикулярные сразу к обеим пересекающимся плоскостям, что невозможно. Следовательно, скорости точек этой прямой OO1 в данное мгновение равны нулю. Мы пришли к убеждению, что при движении тела с одной неподвижной точкой через эту точку всегда можно провести ось, скорости точек которой в данное мгновение равны нулю. Эту ось называют мгновенной осью вращения.
Если в движущемся теле существует ось, скорости точек которой в данное мгновение равны нулю, то скорости других его точек должны быть пропорциональны их расстояниям от оси. Таким образом, картина распределения скоростей в теле с одной неподвижной точкой оказалась на данное мгновение такой же, как и в теле, вращающемся вокруг неподвижной оси.
При изучении вращения тела вокруг неподвижной оси мы условились о направлении вектора угловой скорости. То же условие сохраняется на сферическое движение, где вектор угловой скорости ω направлен от неподвижной точки О по мгновенной оси вращения в такую сторону, чтобы вращение тела представлялось происходящим против хода часов, если смотреть с конца вектора ω, к точке О. Этот вектор можно переносить вдоль оси вращения, но нельзя перемещать параллельно оси. Глубокое отличие вектора угловой скорости при сферическом движении заключается в том, что он постоянно меняет свое направление.
В связи с этим другое толкование принимает и угловое ускорение. Изображая угловое ускорение тела при вращении вокруг оси вектором, мы направляли его в ту или иную сторону по вектору угловой скорости. При вращении тела относительно неподвижной точки дело обстоит иначе: направление угловой скорости меняется. Мы будем называть вектором углового ускорения тела вектор, характеризующий изменение в данное мгновение величины и направления угловой скорости тела
 (97)
(97)
Направление этого вектора, вообще говоря, не совпадает с мгновенной осью вращения. Пусть, например, угловая скорость тела, имеющего неподвижную точку О (рис. 109) и не показанного на чертеже, в данное мгновение равна  , а через малый промежуток времени Δt станет
, а через малый промежуток времени Δt станет  Разделив
Разделив  на Δt, мы получим вектор среднего углового ускорения тела. Если мы будем уменьшать промежуток времени Δt, оставляя неизменным его начало, то вектор среднего углового ускорения тела будет стремиться к своему предельному значению — вектору углового ускорения тела. Этот вектор
на Δt, мы получим вектор среднего углового ускорения тела. Если мы будем уменьшать промежуток времени Δt, оставляя неизменным его начало, то вектор среднего углового ускорения тела будет стремиться к своему предельному значению — вектору углового ускорения тела. Этот вектор  проходит через неподвижную точку О и параллелен касательной к годографу вектора
проходит через неподвижную точку О и параллелен касательной к годографу вектора .
.
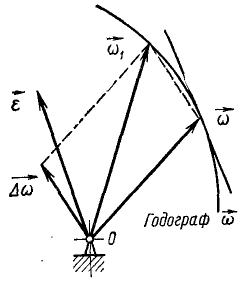
Рис. 109
При сферическом движении тела подвижный аксоид катится без скольжения по неподвижному
Аксоиды при сферическом движении
Положение мгновенной оси в теле, имеющем одну неподвижную точку, непрерывно меняется. Но в каждое мгновение ось имеет вполне определенное положение и всегда проходит через неподвижную точку О. Геометрическое место мгновенных осей вращения, проведенных в теле, представляет собой некоторую коническую поверхность и называется подвижным аксои-дом. Положение мгновенной оси вращения можно отметить и относительно неподвижных координат. Их геометрическое место относительно неподвижных координат, называемое неподвижным аксоидом, также является конической поверхностью с вершиной в той же неподвижной точке О. Оба конуса соприкасаются по мгновенной оси вращения. Сферическое движение тела можно представить как качение без скольжения подвижного аксоида по неподвижному.
Зависимость между проекциями скоростей точек тела, их координатами и проекциями угловой скорости выражается формулами Эйлера
Формулы Эйлера
Как было только что показано, скорость каждой точки K тела, имеющего неподвижную точку О, перпендикулярна к прямой КО и пропорциональна расстоянию KО sin α точки К от мгновенной оси вращения (рис. 110), т. е.
Таким образом, при сферическом движении, как и при вращательном, скорость всякой точки тела можно рассматривать как момент вектора угловой скорости тела относительно этой точки. Проведем из какой-либо точки К тела вектор  в неподвижную точку О, принятую нами за начало отсчета. Этот вектор равен по модулю, но направлен противоположно радиусу-вектору
в неподвижную точку О, принятую нами за начало отсчета. Этот вектор равен по модулю, но направлен противоположно радиусу-вектору  точки K относительно начала отсчета О. Момент вектора угловой скорости относительно точки K представим векторным произведением и запишем в виде определителя третьего порядка, как это мы делали (см. 17 и 17′) в статике при определении момента силы:
точки K относительно начала отсчета О. Момент вектора угловой скорости относительно точки K представим векторным произведением и запишем в виде определителя третьего порядка, как это мы делали (см. 17 и 17′) в статике при определении момента силы: 
Раскладывая этот определитель по элементам первой строки:

раскладывая скорость точки по осям координат:
и сравнивая оба равенства, мы можем выразить проекции скорости точки через проекции угловой скорости тела и координаты точки:
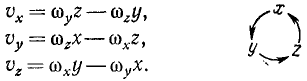 (98)
(98)
Эти соотношения, очень напоминающие знакомые нам выражения (23) момента силы относительно оси, отличаются от них не только тем, что вектор силы заменен вектором угловой скорости, но и знаками. Круговой заменой букв в любой из трех формул (98) можно получить две остальные. Эти формулы имеют применение при определении проекций скоростей точек тела, совершающего сферическое движение или вращение вокруг неподвижной оси. В частном случае, если тело вращается вокруг оси Oz, то проекции угловой скорости ωx = ωy = 0, a ωz=ω, мы получаем формулы (89).
Задача №1
Тело движется вокруг неподвижной точки — начала координат. В некоторое мгновение угловая скорость его изображается вектором, проекции которого на координатные оси равны  ,
,  ,
,  . Найти скорость точки К тела, определяемой координатами
. Найти скорость точки К тела, определяемой координатами  ,
,  ,
, .
.
Решение. Подставляя данные в формулы Эйлера, получим
Ответ. υ = 0. В этот момент времени мгновенная ось проходит через точки О и К.
Задача №2
Ось OA мельничного бегуна (рис. 111) вращается равномерно вокруг вертикальной оси с угловой скоростью ω1. Длина оси OA=l, радиус бегуна равен r. Пренебрегая скольжением бегуна, определить вектор его угловой скорости.
Решение. Движение бегуна можно рассматривать как вращение около неподвижной точки О. Бегун катится без скольжения, поэтому скорость точки C соприкосновения его с горизонтальной плоскостью равна нулю, и, следовательно, в каждое мгновение ось, проходящая через точки О и С, есть мгновенная ось вращения. Центр бегуна (точка А) движется вокруг вертикальной оси, проходящей через О, с постоянной по величине скоростью
Но точка А принадлежит бегуну, а потому ее скорость в то же время является вращательной скоростью вокруг мгновенной оси вращения ОС. Опуская из А перпендикуляр на мгновенную ось, получаем

где ω—угловая скорость бегуна, а а — угол AОС. Из двух выражений υA находим ответ.
Ответ. 
Ускорение всякой точки тела, совершающего сферическое движение, состоит из вращательного и осестремительного ускорений
Чтобы получить ускорение какой-либо точки К тела, находящегося в сферическом движении, продифференцируем по времени вектор ее скорости 

 (99)
(99)
Таким образом, ускорение каждой точки К тела, имеющего одну неподвижную точку О, состоит из векторной суммы двух ускорений: вращательного ускорения  и осестремительного ускорения
и осестремительного ускорения  . В общем случае оба эти ускорения не перпендикулярны друг другу, что необходимо учесть при их суммировании (рис. 112, а).
. В общем случае оба эти ускорения не перпендикулярны друг другу, что необходимо учесть при их суммировании (рис. 112, а).
 (99 / )
(99 / )
Эту формулу называют формулой Ривальса.
Чтобы лучше уяснить чему равны и как направлены эти ускорения, обратимся к чертежу.
Вращательное ускорение (рис. 112, б) выражается векторным произведением углового ускорения  и радиуса вектора
и радиуса вектора  Следовательно, оно направлено перпендикулярно плоскости, образованной этими векторами, и по модулю равно
Следовательно, оно направлено перпендикулярно плоскости, образованной этими векторами, и по модулю равно

где h1—длина перпендикуляра, опущенного из точки К на прямую, по которой направлено угловое ускорение ε. Из формулы (100) в частности следует, что эта прямая обязательно должна проходить через неподвижную точку О, потому что в противном случае точка О имела бы неравное нулю вращательное ускорение, т. е. стала бы подвижной.
Осестремительное ускорение по модулю равно
но этот синус равен единице, так как векторы угловой и вращательной скорости взаимно перпендикулярны. Модуль же вектора вращательной скорости υ = ωh, где h—длина перпендикуляра, опущенного из точки К на мгновенную ось вращения, а потому
Направлено осестремительное ускорение перпендикулярно векторам угловой скорости тела и вращательной скорости точки К, т. е. по прямой h от точки К к мгновенной оси вращения.
Задача №3
Найти скорость и ускорение точки В конического катка, равномерно катящегося без скольжения по горизонтальной конической кольцевой опоре (рис. 113). Диаметр катка BC = 30 см, OA = 20 см, скорость центра катка υА = 40 см/ceκ и направлена перпендикулярно плоскости чертежа на читателя.
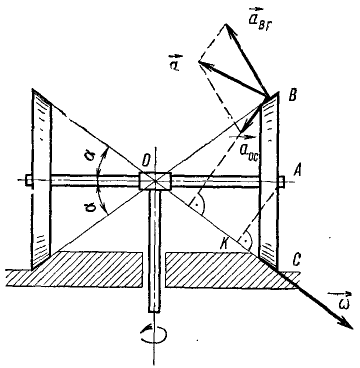
Рис. 113
Решение. Мгновенная ось проходит через неподвижную точку О и точку С, скорость которой в данное мгновение равна нулю, потому что каток катится без скольжения. Вектор угловой скорости ω направлен по мгновенной оси. Модуль его определим, разделив скорость точки А на расстояние АК от мгновенной оси. Из треугольника OAC находим OC 2 = OA 2 + АС 2 = 625. Тогда

Имея эти данные, находим угловую скорость:
Чтобы найти скорость точки В, надо угловую скорость помножить на расстояние точки В от мгновенной оси h = OB sin 2α =25 . 2 . 0,6 . 0,8 =24 см. Скорость точки В перпендикулярна плоскости чертежа, направлена на читателя и по модулю равна 79,2 см/сек.
Найдем теперь вектор углового ускорения. Каток катится равномерно, величина угловой скорости не изменяется, но меняется ее направление, и конец вектора угловой скорости описывает годограф—окружность радиуса ω sin . Угловая скорость ω1, с которой поворачивается вектор угловой скорости ω, равна угловой скорости, с которой поворачивается ось OA во время движения катка:
. Угловая скорость ω1, с которой поворачивается вектор угловой скорости ω, равна угловой скорости, с которой поворачивается ось OA во время движения катка:
Вектор углового ускорения равен скорости годографа вектора угловой скорости. Он направлен перпендикулярно плоскости чертежа на читателя, но приложен в неподвижной точке О:

Чтобы определить вращательное ускорение точки В, надо помножить угловое ускорение в на длину перпендикуляра h1 -BO = 25 см:

Направлен вектор вращательного ускорения перпендикулярно вектору углового ускорения и плечу ВО и в такую сторону, чтобы вектор е указывал против хода часовой стрелки, если смотреть с конца вектора авр . Следовательно, вектор авр лежит в плоскости BOC и перпендикулярен ВО.
Осестремительное ускорение по модулю равно произведению квадрата модуля угловой скорости на длину перпендикуляра h, опущенного из точки В на мгновенную ось, и направлено к оси:
αoc = 3,3 2 ∙24 = 261 см/сек.
Угол между векторами вращательного и осестремительного ускорений равен 2α. Полное ускорение точки В определим, применив теорему косинусов 
Ответ: υB= 79 см/сек, ав = 257 см/сек 2 .
Скорость и ускорение точки тела
Постановка Задачи. Твердое тело совершает сферическое движение по закону, заданному в углах Эйлера  Найти скорость и ускорение точки, положение которой дано относительно подвижных осей координат.
Найти скорость и ускорение точки, положение которой дано относительно подвижных осей координат.
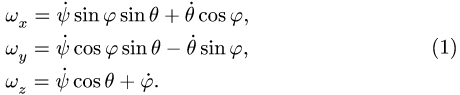
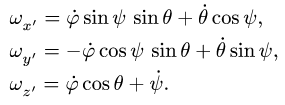
1. Воспользуемся кинематическими уравнениями Эйлера для определения проекций угловой скорости на подвижные оси координат
2. Находим проекции скорости  на подвижные оси относительно которых задан радиус-вектор точки
на подвижные оси относительно которых задан радиус-вектор точки 
3. Вычисляем модуль скорости 
4. Дифференцируя по времени t проекции угловой скорости, получаем компоненты углового ускорения  в подвижных осях.
в подвижных осях.
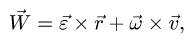
5. Ускорение точки представляем в виде векторной суммы

где  — вращательное, a
— вращательное, a  — осестремительное ускорение.
— осестремительное ускорение.
6. Находим модуль ускорения 
Пример. Твердое тело совершает сферическое движение по закону, заданному в углах Эйлера  При t = 1 с найти скорость и ускорение точки, положение которой относительно подвижных координат задано координатами
При t = 1 с найти скорость и ускорение точки, положение которой относительно подвижных координат задано координатами
Углы  даны в рад. Решение
даны в рад. Решение
1. Зная зависимости угла прецессии  угла нутации
угла нутации  и собственного вращения
и собственного вращения  от времени, воспользуемся кинематическими уравнениями Эйлера (1) для определения проекций угловой скорости на подвижные оси координат. Подставляя в (1) заданные функции, получаем
от времени, воспользуемся кинематическими уравнениями Эйлера (1) для определения проекций угловой скорости на подвижные оси координат. Подставляя в (1) заданные функции, получаем
При t = 1 вычисляем

Модуль угловой скорости тела

2. Вычисляем проекции скорости точки на подвижные оси:
3. Модуль скорости точки 
4. Дифференцируя пo t проекции угловой скорости, получаем компоненты углового ускорения тела в подвижных осях:
При t = 1 получаем

Модуль углового ускорения 
5. Ускорение точки представляем в виде векторной суммы:
Гл. 10. Сферическое движение тела
где 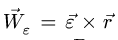 — вращательное, a
— вращательное, a 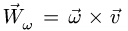 — осестремительное ускорение. Вычисляем отдельно их проекции на оси
— осестремительное ускорение. Вычисляем отдельно их проекции на оси 
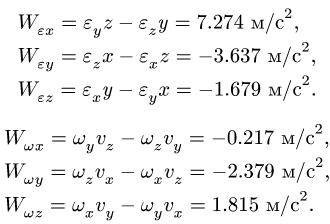
Компоненты ускорения получаем, суммируя 
6. Модуль ускорения  Ответы занесем в таблицу. Скорости — в м/с, ускорения — в
Ответы занесем в таблицу. Скорости — в м/с, ускорения — в 

Замечание 1. При сферическом движении тела векторы угловой скорости и углового ускорения не лежат на одной прямой
 а вектор осестремительного ускорения в общем случае не перпендикулярен вектору вращательного ускорения. В этом можно убедиться, вычислив скалярное произведение
а вектор осестремительного ускорения в общем случае не перпендикулярен вектору вращательного ускорения. В этом можно убедиться, вычислив скалярное произведение 
Замечание 2. Кинематические уравнения Эйлера для определения проекций угловой скорости на неподвижные оси координат имеют вид
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Плоско-параллельное движение твердого тела
- Движение твердого тела, имеющего неподвижную точку
- Движение твердого тела
- Сложение движений точки
- Произвольная пространственная система сил
- Центр параллельных сил и центр тяжести
- Поступательное движение твердого тела
- Вращение твердого тела вокруг неподвижной оси
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
iSopromat.ru

Сферическим движением твердого тела называют такое движение, при котором одна точка тела остается все время неподвижной. Очевидно, траектории всех точек тела при таком движении располагаются на поверхностях сфер.
Для определения положения тела с неподвижной точкой O в каждый момент времени свяжем две системы координат: неподвижную Ox1y1z1 и подвижную Oxyz , жестко связанную с телом, вращающимся вокруг точки O (рисунок 3.1).
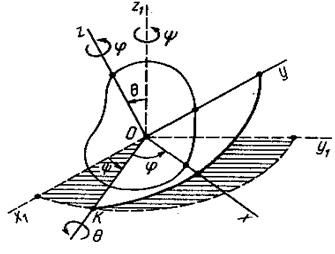
Положение подвижной системы координат относительно неподвижной однозначно определяется тремя углами, называемыми углами Эйлера: ψ — угол прецессии,
θ — угол нутации и
φ — угол собственного вращения.
Линия пересечения подвижной плоскости xOy с неподвижной x1Oy1 называется линией узлов OK. Угол прецессии определяет положение линии узлов на неподвижной плоскости x1Oy1. Для изменения этого угла тело должно вращаться вокруг оси Oz1 , которую называют осью прецессии.
Угол нутации θ — это угол между осями Oz1 и Oz . При изменении угла происходит поворот тела вокруг линии узлов, которую также называют осью нутации.
Угол собственного вращения φ — это угол между линией узлов и подвижной осью Ox. При изменении угла φ тело вращается вокруг оси Oz (оси собственного вращения).
Для определения положения тела с одной неподвижной точкой в любой момент времени необходимо задать углы Эйлера как функции времени, т.е.
Выражения (3.1) называются уравнениями вращения твердого тела вокруг неподвижной точки.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах

Решение задач, контрольных и РГР
Стоимость мы сообщим в течение 5 минут
на указанный вами адрес электронной почты.
Если стоимость устроит вы сможете оформить заказ.
НАБОР СТУДЕНТА ДЛЯ УЧЁБЫ
— Рамки A4 для учебных работ
— Миллиметровки разного цвета
— Шрифты чертежные ГОСТ
— Листы в клетку и в линейку
Сферическое движение твердого тела
Твердое тело с одной неподвижной точкой имеет три степени свободы. Классическими параметрами, определяющими положение этого тела в пространстве, являются три угла Эйлера:  . Если известны как функции времени, то известно и движение твердого тела с одной неподвижной точкой (сферическое движение) (рис. 3.6).
. Если известны как функции времени, то известно и движение твердого тела с одной неподвижной точкой (сферическое движение) (рис. 3.6).
Для составления дифференциальных уравнений сферического движения запишем теорему об изменении кинетического момента в дифференциальной форме
 ,
,
где  — кинетический момент твердого тела, совершающего сферическое движение относительно неподвижной точки
— кинетический момент твердого тела, совершающего сферическое движение относительно неподвижной точки  ;
;
 — главный момент внешних сил относительно неподвижного центра .
— главный момент внешних сил относительно неподвижного центра .
Чтобы записать соответствующие формулы в наиболее простом виде возьмем в качестве координатных – подвижные главные оси инерции  жестко связанные с телом. Тогда проекции кинетического момента на оси координат можно записать в виде
жестко связанные с телом. Тогда проекции кинетического момента на оси координат можно записать в виде

Уравнения движения (динамические уравнения Эйлера) в этом случае примут вид:
где  – моменты инерции тела относительно его осей инерции в точке О;
– моменты инерции тела относительно его осей инерции в точке О;
 – главные моменты внешних сил, приложенных к телу, относительно этих же осей.
– главные моменты внешних сил, приложенных к телу, относительно этих же осей.
К динамическим уравнениям Эйлера следует присоединить кинематические уравнения Эйлера:
которые выражают проекции вектора угловой скорости вращения твердого тела на оси подвижной системы координат, скрепленные с телом через углы Эйлера и их производные по времени.

Рис. 3. 6 Сферическое движение твердого тела.
Динамические и кинематические уравнения Эйлера образуют систему шести нелинейных дифференциальных уравнений первого порядка; интегрирование этой системы представляет сложную математическую задачу. Для интегрирования этих уравнений при решении конкретных задач обычно используют те или иные приближенные математические методы.
Дата добавления: 2015-08-08 ; просмотров: 1316 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
http://isopromat.ru/teormeh/kratkaja-teoria/sfericeskoe-dvizenie-i-sposoby-ego-zadania
http://helpiks.org/4-64617.html