Метод сил — расчет статически неопределимых рам
При решении задач сопромата, статически неопределимой называется такая система, которая не может быть рассчитана при помощи одних только уравнений статики, так как имеет лишние связи. Для расчета таких систем составляются дополнительные уравнения, учитывающие деформации системы.
Оговоримся, что здесь и далее понятие “расчет” подразумевает только построение эпюр внутренних силовых факторов, возникающих в элементах системы, а не расчет на прочность, жесткость и т.д.
Статически неопределимые системы обладают рядом характерных особенностей:
1. Статически неопределимые конструкции являются более жесткими, чем соответствующие статически определимые, так как имеют дополнительные связи.
2. В статически неопределимых системах возникают меньшие внутренние усилия, что определяет их экономичность по сравнению со статически определимыми системами при одинаковых внешних нагрузках.
3. Нарушение лишних связей в статически неопределимой системе не всегда приводит к разрушению, в то время как потеря связи в статически определимой системе делает ее геометрически изменяемой.
4. Для расчета статически неопределимых систем необходимо предварительно задаваться геометрическими характеристиками поперечных сечений элементов, т.е. фактически их формой и размерами, так как их изменение приводит к изменению усилий в связях и новому распределению усилий во всех элементах системы.
5. При расчете статически неопределимых систем необходимо заранее выбрать материал конструкции, так как необходимо знать его модули упругости.
6. В статически неопределимых системах температурное воздействие, осадка опор, неточности изготовления и монтажа вызывают появление дополнительных усилий.
Основными методами расчетастатически неопределимых систем являются:
1. Метод сил. Здесь в качестве неизвестных рассматриваются усилия – силы и моменты.
2.Метод перемещений. Неизвестными являются деформационные факторы – углы поворотов и линейные смещения.
3.Смешанный метод. Здесь часть неизвестных представляет собой усилия, а другая часть – перемещения.
4. Комбинированный метод. Используется при расчете симметричных систем на несимметричные нагрузки. Оказывается, что на симметричную составляющую заданной нагрузки систему целесообразно рассчитывать методом перемещений, а на обратносимметричную составляющую – методом сил.
Помимо указанных аналитичеких методов при расчете особо сложных систем используются различные численные методы.
Канонические уравнения метода сил
Для получения дополнительных уравнений, о которых говорилось в предыдущем параграфе, нужно прежде всего превратить заданную, n раз статически неопределимую систему, в статически определимую, удалив из нее лишние связи. Полученная статически определимая система называется основной. Отметим, что преобразование заданной системы в статически определимую не является обязательным. Иногда используется модификация метода сил, в которой основная система может быть статически неопределимой, однако изложение этого вопроса выходит за рамки этого пособия. Устранение каких-либо связей не изменяет внутренние усилия и деформации системы, если к ней приложить дополнительные силы и моменты, представляющие собой реакции отброшенных связей. Значит, если к основной системе приложить заданную нагрузку и реакции удаленных связей, то основная и заданная системы станут эквивалентными.
В заданной системе по направлениям имеющихся жестких связей, в том числе и тех связей, которые отброшены при переходе к основной системе, перемещений быть не может, поэтому и в основной системе перемещения по направлениям отброшенных связей должны равняться нулю. А для этого реакции отброшенных связей должны иметь строго определенные значения.
Условие равенства нулю перемещения по направлению любой i-ой связи из n отброшенных на основании принципа независимости действия сил имеет вид:

где первый индекс означает направление перемещения и номер отброшенной связи, а второй указывает на причину, вызвавшую перемещение, т.е.  — это перемещение по направлению i-ой связи, вызванное реакцией k-ой связи;
— это перемещение по направлению i-ой связи, вызванное реакцией k-ой связи;  — перемещение по направлению i-ой связи, вызванное одновременным действием всей внешней нагрузки.
— перемещение по направлению i-ой связи, вызванное одновременным действием всей внешней нагрузки.
В методе сил реакцию k-ой связи принято обозначать через Xk. С учетом этого обозначения и в силу справедливости закона Гука перемещения можно представить в виде:

где  — единичное (или удельное) перемещение по направлению i-ой связи, вызванное реакцией
— единичное (или удельное) перемещение по направлению i-ой связи, вызванное реакцией  т.е. реакцией, совпадающей по направлению с Xk, но равной единице.
т.е. реакцией, совпадающей по направлению с Xk, но равной единице.
Подставляя (2) в (1), получим:

Физический смысл уравнения (3): перемещение в основной системе по направлению i-ой отброшенной связи равно нулю.
Записывая выражения, аналогичные (3), для всей совокупности отброшенных связей, получим систему канонических уравнений метода сил:
Вид уравнения (4), т.е. количество слагаемых в каждом из них и их общее число, определяется только степенью статической неопределимости системы и не зависит от ее конкретных особенностей.
Коэффициенты системы канонических уравнений (4) определяются методом Мора-Верещагина путем перемножения соответствующих эпюр. Все эти коэффициенты, как указывалось выше, представляют собой перемещения; коэффициенты, стоящие при неизвестных – единичные перемещения, а свободные члены – грузовые. Единичные перемещения делятся на главные, расположенные по главной диагонали и имеющие одинаковые индексы  и побочные (
и побочные ( ). Главные перемещения всегда положительные, в отличие от побочных. Симметрично расположенные перемещения в соответствии с теоремой о взаимности перемещений равны друг другу, т.е.
). Главные перемещения всегда положительные, в отличие от побочных. Симметрично расположенные перемещения в соответствии с теоремой о взаимности перемещений равны друг другу, т.е.  .
.
Алгоритм расчета методом сил
Независимо от особенностей рассматриваемой конструкции, можно выделить следующую последовательность расчета статически неопределимых систем методом сил:
1. Определить степень статической неопределимости.
2. Выбрать основную систему.
3. Сформировать эквивалентную систему.
4. Записать систему канонических уравнений.
5. Построить единичные и грузовые эпюры внутренних силовых факторов, возникающих в элементах рассматриваемой конструкции.
6. Вычислить коэффициенты при неизвестных и свободные члены системы канонических уравнений.
7. Построить суммарную единичную эпюру.
8. Выполнить универсальную проверку коэффициентов при неизвестных и свободных членов.
9. Решить систему (4), т.е. определить реакции лишних связей.
10. Построить эпюры возникающих внутренних силовых факторов для заданной системы (иначе говоря, окончательные эпюры).
11. Выполнить статическую и кинематическую проверки.
Отметим, что пункты 7, 8, 11 приведенного алгоритма не являются безусловно необходимыми, хотя и позволяют контролировать правильность выполнения расчета. А для систем с одной лишней связью пункты 7 и 8 просто лишены смысла, так как в этом случае суммарная единичная эпюра совпадает с единичной.
Остановимся подробнее на некоторых из вышеперечисленных этапов расчета.
Выбор основной системы
Это важнейший этап расчета, так как рациональный выбор основной системы существенно упрощает вычислительную работу. Рассмотрим возможные способы удаления лишних связей, что и определяет вид основной системы.
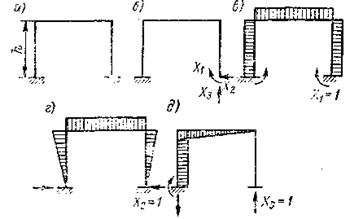
1. Отбрасывание лишних связей осуществляется полным удалением некоторых опор или их заменой опорами с меньшим числом связей. Реакции, действующие в направлениях отброшенных связей, являются лишними неизвестными. На рис.1,б, в, г показаны различные варианты эквивалентной системы, полученные этим способом для рамы (рис.1,а).
2.Постановка шарниров в промежуточных сечениях стержней позволяет в каждом таком сечении установить связь, соответствующую изгибающему моменту. Эти моменты являются лишними неизвестными. Для рамы, имеющей степень статической неопределимости n=3 (рис.2,а), при выборе основной системы необходимо поставить три шарнира. Положение этих шарниров может быть произвольным, но удовлетворяющим требованию геометрической неизменяемости системы (рис.2,б).
3. Рассечение стержня устраняет три связи, соответствующие внутренним усилиям M, Q, N (рис.2,в). В частных случаях (рис.2,г) рассечение стержня по шарниру освобождает две связи (рис.2,д), а рассечение прямолинейного стержня с шарнирами по концам – одну связь (рис.2,е).
Среди связей статически неопределимой системы различают абсолютно необходимые и условно необходимые. К абсолютно необходимым относятся связи, при удалении которых система становится геометрически изменяемой. Для абсолютно необходимой связи характерна статическая определимость усилия в ней, т.е. реакция такой связи может быть вычислена из условия равновесия. При выборе основной системы абсолютно необходимые связи отбрасывать нельзя.
Связи, при удалении которых система продолжает оставаться геометрически неизменяемой, называются условно необходимыми. Система, у которой удалили такую связь, может являться основной системой метода сил.
Вычисление коэффициентов и свободных членов канонических уравнений
Этому этапу расчета предшествует построение единичных и грузовых эпюр внутренних силовых факторов (для балок и рам – эпюр изгибающих моментов). Единичные эпюры строятся от действия безразмерной единичной силы или безразмерного единичного момента, совпадающих по направлению с направлением соответствующей лишней неизвестной в эквивалентной системе, и обозначаются через  , а единичная эпюра – через
, а единичная эпюра – через  .
.
Грузовая эпюра строится от внешней нагрузки, приложенной к основной системе. При этом можно строить одну эпюру от одновременного действия всех внешних нагрузок или несколько эпюр, отдельно от каждой из приложенных нагрузок. Такое разбиение одной грузовой эпюры на несколько более простых, как правило, целесообразно только тогда, когда среди действующих нагрузок есть равномерно распределенная, и эпюра моментов на соответствующем участке под ней является знакопеременной. При этом в каждом каноническом уравнении число свободных членов будет равно числу построенных грузовых эпюр.
Единичные и грузовые перемещения (коэффициенты и свободные члены канонических уравнений) в общем случае можно вычислить методом Мора. Для балок и рам это можно сделать при помощи правила Верещагина.
Универсальная проверка коэффициентов и свободных членов канонических уравнений
Для выполнения универсальной проверки необходимо построить суммарную единичную эпюру  — эпюру моментов от одновременного действия всех единичных сил, приложенных к основной системе:
— эпюру моментов от одновременного действия всех единичных сил, приложенных к основной системе:

Перемножим суммарную единичную эпюру с эпюрой :
Таким образом результат перемножения суммарной и i-ой единичной эпюр — это перемещение по направлению i-ой связи от совместного действия единичных лишних неизвестных. Это перемещение равно сумме коэффициентов i-го канонического уравнения:
Такая проверка называется построчной и выполняется для каждого канонического уравнения.
Вместо n построчных проверок чаще всего выполняется одна – универсальная поверка, которая состоит в перемножении суммарной единичной эпюры самой на себя и проверке условия:

Если универсальная проверка выполняется, значит единичные перемещения вычислены правильно; если нет – необходимо выполнить построчные проверки, что позволит уточнить перемещение, при вычислении которого допущена ошибка.
Для выполнения проверки грузовых перемещений необходимо перемножить суммарную единичную и грузовую эпюры изгибающих моментов:
Таким образом, проверка свободных членов системы канонических уравнений (4) состоит в выполнении условия:

Построение окончательных эпюр внутренних силовых факторов
Окончательные эпюры можно построить двумя способами.
Так как при найденных значениях лишних неизвестных Xi выполняются условия совместности деформаций, то из расчета основной системы можно получить все искомые внутренние усилия заданной системы. На основании принципа независимости действия сил для изгибающих моментов получим:

или, учитывая, что

приходим к выражению:

Аналогично определяется продольные и поперечные силы:
Второй способ основан на том, что в результате вычисления реакций лишних связей Xi исходная статически неопределимая система приведена к статически определимой системе, загруженной внешними нагрузками и реакциями лишних связей. Поэтому окончательные эпюры внутренних силовых факторов можно построить для эквивалентной системы, вычислив предварительно (и то не всегда) из условий равновесия опорные реакции последней.
Недостатком первого способа является то обстоятельство, что для его реализации необходимо дополнительно построить эпюры Qi, Ni (i=1, 2, …,n), Qf, Nf, которые не используются в расчете методом сил и поэтому не были построены ранее.
В связи с этим для построения окончательных эпюр более рациональным представляется второй способ, а условие (8) можно использовать в качестве дополнительной проверки.
Проверка окончательной эпюры изгибающих моментов
Эта проверка выполняется в двух вариантах: статическая и кинематическая.
При статической проверке, выполняемой обычно для рам, вырезаются узлы и записываются условия их равновесия под действием узловых сосредоточенных моментов и изгибающих моментов на концах стержней. Эта проверка является вспомогательной и выполняется автоматически при правильных эпюрах изгибающих моментов в основной системе и при выполнении кинематической проверки.
Статическая проверка эпюр Q и N состоит в том, что для любой отсеченной части рамы сумма проекций на две оси всех действующих сил – внешних нагрузок и внутренних усилий – должна быть равна нулю.
Основной проверкой окончательной эпюры моментов в методе сил является кинематическая проверка, которая может быть построчной или универсальной.
При построчной проверке каждая единичная эпюра моментов перемножается с окончательной эпюрой моментов М:
Таким образом, в результате перемножения каждой единичной эпюры с окончательной эпюрой моментов получим ноль:

Вариантом построчной проверки является проверка по замкнутомуконтуру, состоящая в том, что сумма приведенных (т.е. деленных на жесткость соответствующего стержня или его участка) площадь эпюры М, находящихся внутри каждого замкнутого бесшарнирного контура, должна быть равна сумме приведенных площадей, находящихся снаружи этого контура.
Суммируя выражения типа (11) для всех n, получим выражение, служащее для универсальной кинематической проверки окончательной эпюры изгибающих моментов:

Формулу (12) можно интерпретировать следующим образом: условное перемещение эквивалентной, или, что то же самое, заданной системы по направлению всех неизвестных от действия всех неизвестных и внешних нагрузок, равно нулю.
Определение перемещений в статически неопределимых системах
Для определения перемещения в статически неопределимой системе используется тождественность заданной и эквивалентной систем в том смысле, что если условия совместности деформаций выполняются, т.е. справедливы уравнения (4), то перемещения в эквивалентной системе соответствуют перемещениям заданной системы. Тогда, построив для основной системы эпюру изгибающих моментов  от единичной силы (или единичного момента) приложенной в направлении искомого перемещения, величину перемещения находим по формуле:
от единичной силы (или единичного момента) приложенной в направлении искомого перемещения, величину перемещения находим по формуле:
где М – эпюра изгибающих моментов от внешней нагрузки, построенная для статически неопределимой системы.
Отметим, что при вычислении перемещения  можно поступить и наоборот: единичную эпюру моментов построить в статически неопределимой заданной системе, а эпюру моментов от внешних нагрузок М – в основной (статически определимой) системе.
можно поступить и наоборот: единичную эпюру моментов построить в статически неопределимой заданной системе, а эпюру моментов от внешних нагрузок М – в основной (статически определимой) системе.
Пример расчета
Построить эпюры продольных, поперечных сил и изгибающих моментов для плоской рамы (рис.3,а).
Степень статической неопределимости рамы:
n = r — s = 4 — 3 = 1
Выбираем основную систему, отбрасывая на правой опоре горизонтальный стержень (рис.3,б), т.е. заменяем шарнирно-неподвижною опору на шарнирно-подвижную. На базе основной системы формируем эквивалентную систему (рис.3,в).
Заменяя реакцию лишней связи соответствующей единичной силой, (рис. 3,г) строим эпюру моментов M1 (рис.3,д).
Грузовая эпюра моментов  (рис.3,ж), построенная от одновременного действия всех внешних нагрузок (рис.3,е), является знакопеременной на участке, где действует нагрузка q. Это создает определенные трудности (хотя и не непреодолимые!) при ее перемножении с единичной эпюрой M1. В связи с этим целесообразно построить две грузовых эпюры – отдельно от нагрузки q (эпюра Mq) и от совместного действия F и M (эпюра MF). Эти варианты нагружения и эпюры представлены на рис.3,з и рис.3,а,б,в.
(рис.3,ж), построенная от одновременного действия всех внешних нагрузок (рис.3,е), является знакопеременной на участке, где действует нагрузка q. Это создает определенные трудности (хотя и не непреодолимые!) при ее перемножении с единичной эпюрой M1. В связи с этим целесообразно построить две грузовых эпюры – отдельно от нагрузки q (эпюра Mq) и от совместного действия F и M (эпюра MF). Эти варианты нагружения и эпюры представлены на рис.3,з и рис.3,а,б,в.
При таком разбиении внешней нагрузки каноническое уравнение метода сил содержит два грузовых перемещения и имеет вид:

Вычислим коэффициенты канонического уравнения:
Реакция лишних связи:
Эпюры Nz, Qy, Mx для заданной системы, загруженной нагрузками F, M, q и X1 (рис.3,г) представлены на рис.3,д,е,ж.
Как уже говорилось, при построении эпюр Nz и Q в рамах ординаты можно откладывать в любую сторону, но обязательно указывать знаки; а при построении эпюр Mx знаки можно не указывать, но обязательно откладывать ординаты со стороны сжатых волокон соответствующих элементов.
В рассмотренном примере универсальная проверка правильности вычисления коэффициентов канонического уравнения и свободных членов не выполнялась, так как рама имеет степень статической неопределимости n = 1, а, значит, суммарная единичная эпюра (если ее построить) совпадет с единичной эпюрой M1. В этом случае можно (и желательно!) проверить правильность выполнения расчета при помощи универсальной кинематической проверки окончательной эпюры моментов Mx.
Выполним эту проверку для рамы, рассмотренной в последнем примере (рис.3,а). Должно выполняться условие:
Покажем отдельно фрагменты перемножаемых эпюр (рис.3,д и рис.4,ж) для ригеля (рис.5,а,б) и стойки (рис.5,в,г) с указанением всех характерных размеров и соответствующих им ординат. Причем стойка (на рис.5,в,г) показана в горизонтальном положении.
Точка пересечения кривой на ригеле эпюры Mx с осью (рис.5,б) определяется следующим образом. Обозначим координату произвольного сечения, отсчитываемую от правого конца ригеля, через z, тогда момент Mx определяется в виде:
откуда z = 3,77 м (второй корень этого уравнения лишен физического смысла).
Канонические уравнения прямой в пространстве: теория, примеры, решение задач
Одним из видов уравнений прямой в пространстве является каноническое уравнение. Мы рассмотрим это понятие во всех подробностях, поскольку знать его необходимо для решения многих практических задач.
В первом пункте мы сформулируем основные уравнения прямой, расположенной в трехмерном пространстве, и приведем несколько примеров. Далее покажем способы вычисления координат направляющего вектора при заданных канонических уравнениях и решение обратной задачи. В третьей части мы расскажем, как составляется уравнение прямой, проходящей через 2 заданные точки в трехмерном пространстве, а в последнем пункте укажем на связи канонических уравнений с другими. Все рассуждения будут проиллюстрированы примерами решения задач.
Что такое каноническое уравнение прямой в пространстве
О том, что вообще из себя представляют канонические уравнения прямой, мы уже говорили в статье, посвященной уравнениям прямой на плоскости. Случай с трехмерным пространством мы разберем по аналогии.
Допустим, у нас есть прямоугольная система координат O x y z , в которой задана прямая. Как мы помним, задать прямую можно разными способами. Используем самый простой из них – зададим точку, через которую будет проходить прямая, и укажем направляющий вектор. Если обозначить прямую буквой a , а точку M , то можно записать, что M 1 ( x 1 , y 1 , z 1 ) лежит на прямой a и направляющим вектором этой прямой будет a → = ( a x , a y , a z ) . Чтобы множество точек M ( x , y , z ) определяло прямую a , векторы M 1 M → и a → должны быть коллинеарными,
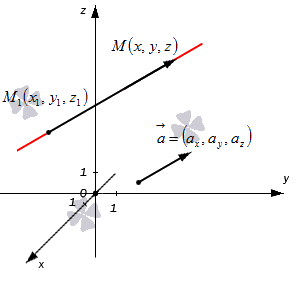
Если мы знаем координаты векторов M 1 M → и a → , то можем записать в координатной форме необходимое и достаточное условие их коллинеарности. Из первоначальных условий нам уже известны координаты a → . Для того чтобы получить координаты M 1 M → , нам необходимо вычислить разность между M ( x , y , z ) и M 1 ( x 1 , y 1 , z 1 ) . Запишем:
M 1 M → = x — x 1 , y — y 1 , z — z 1
После этого нужное нам условие мы можем сформулировать так: M 1 M → = x — x 1 , y — y 1 , z — z 1 и a → = ( a x , a y , a z ) : M 1 M → = λ · a → ⇔ x — x 1 = λ · a x y — y 1 = λ · a y z — z 1 = λ · a z
Здесь значением переменной λ может быть любое действительное число или ноль. Если λ = 0 , то M ( x , y , z ) и M 1 ( x 1 , y 1 , z 1 ) совпадут, что не противоречит нашим рассуждениям.
При значениях a x ≠ 0 , a y ≠ 0 , a z ≠ 0 мы можем разрешить относительно параметра λ все уравнения системы x — x 1 = λ · a x y — y 1 = λ · a y z — z 1 = λ · a z
Между правыми частями после этого можно будет поставить знак равенства:
x — x 1 = λ · a x y — y 1 = λ · a y z — z 1 = λ · a z ⇔ λ = x — x 1 a x λ = y — y 1 a y λ = z — z 1 a z ⇔ x — x 1 a x = y — y 1 a y = z — z 1 a z
В итоге у нас получились уравнения x — x 1 a x = y — y 1 a y = z — z 1 a z , с помощью которых можно определить искомую прямую в трехмерном пространстве. Это и есть нужные нам канонические уравнения.
Такая запись используется даже при нулевых значениях одного или двух параметров a x , a y , a z , поскольку она в этих случаях она также будет верна. Все три параметра не могут быть равны 0 , поскольку направляющий вектор a → = ( a x , a y , a z ) нулевым не бывает.
Если один-два параметра a равны 0 , то уравнение x — x 1 a x = y — y 1 a y = z — z 1 a z носит условный характер. Его следует считать равным следующей записи:
x = x 1 + a x · λ y = y 1 + a y · λ z = z 1 + a z · λ , λ ∈ R .
Частные случаи канонических уравнений мы разберем в третьем пункте статьи.
Из определения канонического уравнения прямой в пространстве можно сделать несколько важных выводов. Рассмотрим их.
1) если исходная прямая будет проходить через две точки M 1 ( x 1 , y 1 , z 1 ) и M 2 ( x 2 , y 2 , z 2 ) , то канонические уравнения примут следующий вид:
x — x 1 a x = y — y 1 a y = z — z 1 a z или x — x 2 a x = y — y 2 a y = z — z 2 a z .
2) поскольку a → = ( a x , a y , a z ) является направляющим вектором исходной прямой, то таковыми будут являться и все векторы μ · a → = μ · a x , μ · a y , μ · a z , μ ∈ R , μ ≠ 0 . Тогда прямая может быть определена с помощью уравнения x — x 1 a x = y — y 1 a y = z — z 1 a z или x — x 1 μ · a x = y — y 1 μ · a y = z — z 1 μ · a z .
Вот несколько примеров таких уравнений с заданными значениями:
x — 3 2 = y + 1 — 1 2 = z ln 7
Тут x 1 = 3 , y 1 = — 1 , z 1 = 0 , a x = 2 , a y = — 1 2 , a z = ln 7 .
x — 4 0 = y + 2 1 = z + 1 0
Тут M 1 ( 4 , — 2 , — 1 ) , a → = ( 0 , 1 , 0 ) .
Как составить каноническое уравнение прямой в пространстве
Мы выяснили, что канонические уравнения вида x — x 1 a x = y — y 1 a y = z — z 1 a z будут соответствовать прямой, проходящей через точку M 1 ( x 1 , y 1 , z 1 ) , а вектор a → = ( a x , a y , a z ) будет для нее направляющим. Значит, если мы знаем уравнение прямой, то можем вычислить координаты ее направляющего вектора, а при условии заданных координат вектора и некоторой точки, расположенной на прямой, мы можем записать ее канонические уравнения.
Разберем пару конкретных задач.
У нас есть прямая, заданная в трехмерном пространстве с помощью уравнения x + 1 4 = y 2 = z — 3 — 5 . Запишите координаты всех направляющих векторов для нее.
Решение
Чтобы получить координаты направляющего вектора, нам надо просто взять значения знаменателей из уравнения. Мы получим, что одним из направляющих векторов будет a → = ( 4 , 2 , — 5 ) , а множество всех подобных векторов можно сформулировать как μ · a → = 4 · μ , 2 · μ , — 5 · μ . Здесь параметр μ – любое действительное число (за исключением нуля).
Ответ: 4 · μ , 2 · μ , — 5 · μ , μ ∈ R , μ ≠ 0
Запишите канонические уравнения, если прямая в пространстве проходит через M 1 ( 0 , — 3 , 2 ) и имеет направляющий вектор с координатами — 1 , 0 , 5 .
Решение
У нас есть данные, что x 1 = 0 , y 1 = — 3 , z 1 = 2 , a x = — 1 , a y = 0 , a z = 5 . Этого вполне достаточно, чтобы сразу перейти к записи канонических уравнений.
x — x 1 a x = y — y 1 a y = z — z 1 a z ⇔ x — 0 — 1 = y — ( — 3 ) 0 = z — 2 5 ⇔ ⇔ x — 1 = y + 3 0 = z — 2 5
Ответ: x — 1 = y + 3 0 = z — 2 5
Эти задачи – самые простые, потому что в них есть все или почти все исходные данные для записи уравнения или координат вектора. На практике чаще можно встретить те, в которых сначала нужно находить нужные координаты, а потом записывать канонические уравнения. Примеры таких задач мы разбирали в статьях, посвященных нахождению уравнений прямой, проходящей через точку пространства параллельно заданной, а также прямой, проходящей через некоторую точку пространства перпендикулярно плоскости.
Канонические уравнения с одним или двумя a, равными нулю
Ранее мы уже говорили, что одно-два значения параметров a x , a y , a z в уравнениях могут иметь нулевые значения. При этом запись x — x 1 a x = y — y 1 a y = z — z 1 a z = λ приобретает формальный характер, поскольку мы получаем одну или две дроби с нулевыми знаменателями. Ее можно переписать в следующем виде (при λ ∈ R ):
x = x 1 + a x · λ y = y 1 + a y · λ z = z 1 + a z · λ
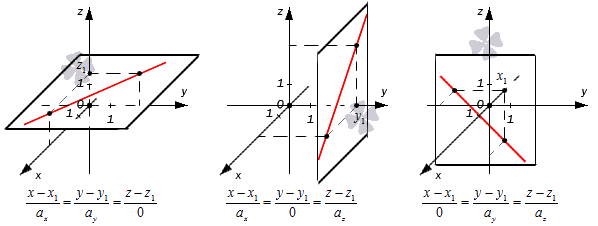
Рассмотрим эти случаи подробнее. Допустим, что a x = 0 , a y ≠ 0 , a z ≠ 0 , a x ≠ 0 , a y = 0 , a z ≠ 0 , либо a x ≠ 0 , a y ≠ 0 , a z = 0 . В таком случае нужные уравнения мы можем записать так:
- В первом случае:
x — x 1 0 = y — y 1 a y = z — z 1 a z = λ ⇔ x — x 1 = 0 y = y 1 + a y · λ z = z 1 + a z · λ ⇔ x — x 1 = 0 y — y 1 a y = z — z 1 a z = λ
Во втором случае:
x — x 1 a x = y — y 1 0 = z — z 1 a z = λ ⇔ x = x 1 + a x · λ y — y 1 = 0 z = z 1 + a z · λ ⇔ y — y 1 = 0 x — x 1 a x = z — z 1 a z = λ
В третьем случае:
x — x 1 a x = y — y 1 a y = z — z 1 0 = λ ⇔ x = x 1 + a x · λ y = y 1 + a y · λ z — z 1 = 0 ⇔ z — z 1 = 0 x — x 1 a x = y — y 1 a y = λ
Получается, что при таком значении параметров нужные прямые находятся в плоскостях x — x 1 = 0 , y — y 1 = 0 или z — z 1 = 0 , которые располагаются параллельно координатным плоскостям (если x 1 = 0 , y 1 = 0 либо z 1 = 0 ). Примеры таких прямых показаны на иллюстрации.
Следовательно, мы сможем записать канонические уравнения немного иначе.
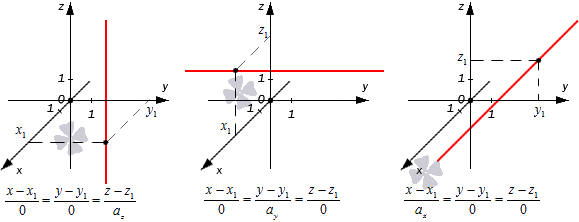
- В первом случае: x — x 1 0 = y — y 1 0 = z — z 1 a z = λ ⇔ x — x 1 = 0 y — y 1 = 0 z = z 1 + a z · λ , λ ∈ R
- Во втором: x — x 1 0 = y — y 1 a y = z — z 1 0 = λ ⇔ x — x 1 = 0 y = y 1 + a y · λ , λ ∈ R z — z 1 = 0
- В третьем: x — x 1 a x = y — y 1 0 = z — z 1 0 = λ ⇔ x = x 1 + a x · λ , λ ∈ R y = y 1 = 0 z — z 1 = 0
Во всех трех случаях исходные прямые будут совпадать с координатными осями или окажутся параллельными им: x 1 = 0 y 1 = 0 , x 1 = 0 z 1 = 0 , y 1 = 0 z 1 = 0 . Их направляющие векторы имеют координаты 0 , 0 , a z , 0 , a y , 0 , a x , 0 , 0 . Если обозначить направляющие векторы координатных прямых как i → , j → , k → , то направляющие векторы заданных прямых будут коллинеарными по отношению к ним. На рисунке показаны эти случаи:
Покажем на примерах, как применяются эти правила.
Найдите канонические уравнения, с помощью которых можно определить в пространстве координатные прямые O z , O x , O y .
Решение
Координатные векторы i → = ( 1 , 0 , 0 ) , j → = 0 , 1 , 0 , k → = ( 0 , 0 , 1 ) будут для исходных прямых направляющими. Также мы знаем, что наши прямые будут обязательно проходить через точку O ( 0 , 0 , 0 ) , поскольку она является началом координат. Теперь у нас есть все данные, чтобы записать нужные канонические уравнения.
Для прямой O x : x 1 = y 0 = z 0
Для прямой O y : x 0 = y 1 = z 0
Для прямой O z : x 0 = y 0 = z 1
Ответ: x 1 = y 0 = z 0 , x 0 = y 1 = z 0 , x 0 = y 0 = z 1 .
В пространстве задана прямая, которая проходит через точку M 1 ( 3 , — 1 , 12 ) . Также известно, что она расположена параллельно оси ординат. Запишите канонические уравнения этой прямой.
Решение
Учитывая условие параллельности, мы можем сказать, что вектор j → = 0 , 1 , 0 будет для нужной прямой направляющим. Следовательно, искомые уравнения будут иметь вид:
x — 3 0 = y — ( — 1 ) 1 = z — 12 0 ⇔ x — 3 0 = y + 1 1 = z — 12 0
Ответ: x — 3 0 = y + 1 1 = z — 12 0
Как записать каноническое уравнение прямой, которая проходит через две заданные точки
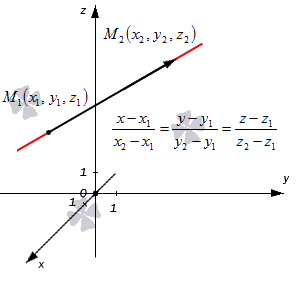
Допустим, что у нас есть две несовпадающие точки M 1 ( x 1 , y 1 , z 1 ) и M 2 ( x 2 , y 2 , z 2 ) , через которые проходит прямая. Как в таком случае мы можем сформулировать для нее каноническое уравнение?
Для начала примем вектор M 1 M 2 → (или M 2 M 1 → ) за направляющий вектор данной прямой. Поскольку у нас есть координаты нужных точек, сразу вычисляем координаты вектора:
M 1 M 2 → = x 2 — x 1 , y 2 — y 1 , z 2 — z 1
Далее переходим непосредственно к записи канонического уравнения, ведь все нужные данные у нас уже есть. Исходная прямая будет определяться записями следующего вида:
x — x 1 x 2 — x 1 = y — y 1 y 2 — y 1 = z — z 1 z 2 — z 1 x — x 2 x 2 — x 1 = y — y 2 y 2 — y 1 = z — z 2 z 2 — z 1
Получившиеся равенства – это и есть канонические уравнения прямой, проходящей через две заданные точки. Взгляните на иллюстрацию:
Приведем пример решения задачи.
в пространстве есть две точки с координатами M 1 ( — 2 , 4 , 1 ) и M 2 ( — 3 , 2 , — 5 ) , через которые проходит прямая. Запишите канонические уравнения для нее.
Решение
Согласно условиям, x 1 = — 2 , y 1 = — 4 , z 1 = 1 , x 2 = — 3 , y 2 = 2 , z 2 = — 5 . Нам требуется подставить эти значения в каноническое уравнение:
x — ( — 2 ) — 3 — ( — 2 ) = y — ( — 4 ) 2 — ( — 4 ) = z — 1 — 5 — 1 ⇔ x + 2 — 1 = y + 4 6 = z — 1 — 6
Если мы возьмем уравнения вида x — x 2 x 2 — x 1 = y — y 2 y 2 — y 1 = z — z 2 z 2 — z 1 , то у нас получится: x — ( — 3 ) — 3 — ( — 2 ) = y — 2 2 — ( — 4 ) = z — ( — 5 ) — 5 — 1 ⇔ x + 3 — 1 = y — 2 6 = z + 5 — 6
Ответ: x + 3 — 1 = y — 2 6 = z + 5 — 6 либо x + 3 — 1 = y — 2 6 = z + 5 — 6 .
Преобразование канонических уравнений прямой в пространстве в другие виды уравнений
Иногда пользоваться каноническими уравнениями вида x — x 1 a x = y — y 1 a y = z — z 1 a z не очень удобно. Для решения некоторых задач лучше использовать запись x = x 1 + a x · λ y = y 1 + a y · λ z = z 1 + a z · λ . В некоторых случаях более предпочтительно определить нужную прямую с помощью уравнений двух пересекающихся плоскостей A 1 x + B 1 y + C 1 z + D 1 = 0 A 2 x + B 2 y + C 2 z + D 2 = 0 . Поэтому в данном пункте мы разберем, как можно перейти от канонических уравнений к другим видам, если это требуется нам по условиям задачи.
Понять правила перехода к параметрическим уравнениям несложно. Сначала приравняем каждую часть уравнения к параметру λ и разрешим эти уравнения относительно других переменных. В итоге получим:
x — x 1 a x = y — y 1 a y = z — z 1 a z ⇔ x — x 1 a x = y — y 1 a y = z — z 1 a z ⇔ ⇔ x — x 1 a x = λ y — y 1 a y = λ z — z 1 a z = λ ⇔ x = x 1 + a x · λ y = y 1 + a y · λ z = z 1 + a z · λ
Значение параметра λ может быть любым действительным числом, ведь и x , y , z могут принимать любые действительные значения.
В прямоугольной системе координат в трехмерном пространстве задана прямая, которая определена уравнением x — 2 3 = y — 2 = z + 7 0 . Запишите каноническое уравнение в параметрическом виде.
Решение
Сначала приравниваем каждую часть дроби к λ .
x — 2 3 = y — 2 = z + 7 0 ⇔ x — 2 3 = λ y — 2 = λ z + 7 0 = λ
Теперь разрешаем первую часть относительно x , вторую – относительно y , третью – относительно z . У нас получится:
x — 2 3 = λ y — 2 = λ z + 7 0 = λ ⇔ x = 2 + 3 · λ y = — 2 · λ z = — 7 + 0 · λ ⇔ x = 2 + 3 · λ y = — 2 · λ z = — 7
Ответ: x = 2 + 3 · λ y = — 2 · λ z = — 7
Следующим нашим шагом будет преобразование канонических уравнений в уравнение двух пересекающихся плоскостей (для одной и той же прямой).
Равенство x — x 1 a x = y — y 1 a y = z — z 1 a z нужно для начала представить в виде системы уравнений:
x — x 1 a x = y — y 1 a y x — x 1 a x = z — z 1 a x y — y 1 a y = z — z 1 a z
Поскольку p q = r s мы понимаем как p · s = q · r , то можно записать:
x — x 1 a x = y — y 1 a y x — x 1 a x = z — z 1 a z y — y 1 a y = z — z 1 a z ⇔ a y · ( x — x 1 ) = a x · ( y — y 1 ) a z · ( x — x 1 ) = a x · ( z — z 1 ) a z · ( y — y 1 ) = a y · ( z — z 1 ) ⇔ ⇔ a y · x — a x · y + a x · y 1 — a y · x 1 = 0 a z · x — a x · z + a x · z 1 — a z · x 1 = 0 a z · y — a y · z + a y · z 1 — a z · y 1 = 0
В итоге у нас вышло, что:
x — x 1 a x = y — y 1 a y = z — z 1 a z ⇔ a y · x — a x · y + a x · y 1 — a y · x 1 = 0 a z · x — a x · z + a x · z 1 — a z · x 1 = 0 a z · y — a y · z + a y · z 1 — a z · y 1 = 0
Выше мы отмечали, что все три параметра a не могут одновременно быть нулевыми. Значит, ранг основной матрицы системы будет равен 2 , поскольку a y — a x 0 a z 0 — a x 0 a z — a y = 0 и один из определителей второго порядка не равен 0 :
a y — a x a z 0 = a x · a z , a y 0 a z — a x = a x · a y , — a x 0 0 — a x = a x 2 a y — a x 0 a z = a y · a z , a y 0 0 — a y = — a y 2 , — a x 0 a z — a y = a x · a y a z 0 0 a z = a z 2 , a z — a x 0 — a y = — a y · a z , 0 — a x a z — a y = a x · a z
Это дает нам возможность исключить одно уравнение из наших расчетов. Таким образом, канонические уравнения прямой можно преобразовать в систему из двух линейных уравнений, которые будут содержать 3 неизвестных. Они и будут нужными нам уравнениями двух пересекающихся плоскостей.
Рассуждение выглядит довольно сложным, однако на практике все делается довольно быстро. Продемонстрируем это на примере.
Прямая задана каноническим уравнением x — 1 2 = y 0 = z + 2 0 . Напишите для нее уравнение пересекающихся плоскостей.
Решение
Начнем с попарного приравнивания дробей.
x — 1 2 = y 0 = z + 2 0 ⇔ x — 1 2 = y 0 x — 1 2 = z + 2 0 y 0 = z + 2 0 ⇔ ⇔ 0 · ( x — 1 ) = 2 y 0 · ( x — 1 ) = 2 · ( z + 2 ) 0 · y = 0 · ( z + 2 ) ⇔ y = 0 z + 2 = 0 0 = 0
Теперь исключаем из расчетов последнее уравнение, потому что оно будет верным при любых x , y и z . В таком случае x — 1 2 = y 0 = z + 2 0 ⇔ y = 0 z + 2 = 0 .
Это и есть уравнения двух пересекающихся плоскостей, которые при пересечении образуют прямую, заданную с помощью уравнения x — 1 2 = y 0 = z + 2 0
Ответ: y = 0 z + 2 = 0
Прямая задана уравнениями x + 1 2 = y — 2 1 = z — 5 — 3 , найдите уравнение двух плоскостей, пересекающихся по данной прямой.
Решение
Приравниваем дроби попарно.
x + 1 2 = y — 2 1 = z — 5 — 3 ⇔ x + 1 2 = y — 2 1 x + 1 2 = z — 5 — 3 y — 2 1 = z — 5 — 3 ⇔ ⇔ 1 · ( x + 1 ) = 2 · ( y — 2 ) — 3 · ( x + 1 ) = 2 · ( z — 5 ) — 3 · ( y — 2 ) = 1 · ( z — 5 ) ⇔ x — 2 y + 5 = 0 3 x + 2 z — 7 = 0 3 y + 7 — 11 = 0
Получаем, что определитель основной матрицы полученной системы будет равен 0 :
1 — 2 0 3 0 2 0 3 1 = 1 · 0 · 1 + ( — 2 ) · 2 · 0 + 0 · 3 · 3 — 0 · 0 · 0 — 1 · 2 · 3 — ( — 2 ) · 3 · 1 = 0
Минор второго порядка нулевым при этом не будет: 1 — 2 3 0 = 1 · 0 — ( — 2 ) · 3 = 6 . Тогда мы можем принять его в качестве базисного минора.
В итоге мы можем вычислить ранг основной матрицы системы x — 2 y + 5 = 0 3 x + 2 z — 7 = 0 3 y + z — 11 = 0 . Это будет 2. Третье уравнение исключаем из расчета и получаем:
x — 2 y + 5 = 0 3 x + 2 z — 7 = 0 3 y + z — 11 = 0 ⇔ x — 2 y + 5 = 0 3 x + 2 z — 7 = 0
Ответ: x — 2 y + 5 = 0 3 x + 2 z — 7 = 0
Канонические уравнения метода сил и их упрощение
Теоремы об упругих системах, рассмотренные выше (ранее), являются основой для современных методов расчета статически неопределимых систем. Различают два метода расчета статически неопределимых систем: метод сил и метод перемещений. В расчете статически неопределимых систем по методу сил в качестве неизвестных принимаются внутренние усилия в лишних связях.
Расчет по методу сил статически неопределимых систем в ТТ является наиболее распространенным, поэтому методу расчет начинают с выбора основной системы. Основной называют такую статически определимую и геометрически неизменяемую систему, которая после удаления лишних связей в заданной системе и замены их неизвестными усилиями находится в таком же напряженно-деформированном состоянии, что и заданная система. Следует иметь в виду, что для одной и той же заданной системы может быть несколько вариантов основной системы.
Поэтому нужно стремиться к наиболее рациональной основной системе, в наибольшей степени, упрощающей расчет.
После выбора основной системы расчет осуществляется в следующей последовательности. К основной системе кроме заданной нагрузки по направлению отвращенных связей прикладываются неизвестные силы, называемые лишними неизвестными: Х1, Х2, Х3 и т.д.
Неизвестные силы подбираются с таким расчетом, чтобы перемещения в основной и заданной системах были равны. Перемещения по направлению какой-либо неизвестной силы будут равняться нулю, независимо от того, где она приложена – на опоре или в рассеченном элементе, поскольку в заданной системе перемещения по направлению неизвестных сил отсутствуют. Следующим типом расчета будет составление уравнений совместности перемещений, которые выражают условие равенства нулю перемещений по направлению каждой лишней связей.
|

|
Рисунок 43 – Схема портальных рам
Рассмотрим, например, приведенную на рис.44, а неразрезную балку с числом лишних связей, равным n. Основную систему выберем путем удаления лишних опорных стержней и замены их неизвестными силами (рис.44, б). Столь неудачный в данном случае выбор основной системы сделан специально для того, чтобы сохранить в системе канонических уравнений все их члены.
В этом случае система n уравнений может быть записана так:
 (85)
(85)
Уравнения совместности перемещений называются каноническими уравнениями метода сил, поскольку они записываются по определенному закону. Эти уравнения, количество которых равна числу лишних неизвестных, совместно с уравнениями равновесия позволяют раскрыть статическую неопределимость системы, т.е. определить значения лишних неизвестных. Неизвестными в них являются реакции отброшенных связей Х1, Х2, Х3 и т.д.
В качестве коэффициентов при неизвестных стоят перемещения основной системы, вызванные единичными силами, действующими по направлению неизвестных (рис.44, в—е), и внешней нагрузкой (рис.44, ж).
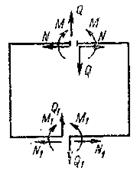
Левые части уравнений (85) выражают суммарные перемещения точек приложения неизвестных сил по их направлениям от действия приложенных сил. Поскольку в заданной системе эти перемещения отсутствуют, приравниваем их нулю. Для выяснения смысла уравнений (85) рассмотрим содержание одного из них, например второго. Множитель δ21 в первом члене представляет собой перемещение точки приложения силы Х2 по её направлению вызванное единичной силой Х1; произведение δ21х1 – перемещение точки 2, вызванное силой х1. Следующий член δ22х22 выражает перемещение точки приложения силы х2 по её направлению, вызванное той же силой х2 и т.д. Свободный член  представляет собой перемещение точки приложения силы х2 по её направлению, вызванное заданной внешней нагрузкой. Буква
представляет собой перемещение точки приложения силы х2 по её направлению, вызванное заданной внешней нагрузкой. Буква  для свободного члена ставится в отличие от δ, потому что это перемещение не от единичной силы, а от всей заданной внешней нагрузки, т.е.
для свободного члена ставится в отличие от δ, потому что это перемещение не от единичной силы, а от всей заданной внешней нагрузки, т.е.  . Во многих случаях рациональный выбор основной системы может существенно упростить вычисления системы уравнений (85). Канонические уравнения представляют собой систему линейных уравнений, решение которых не представляет принципиальных трудностей, одного при большем числе уравнений трудоемко. В первую очередь надо вычислить большое число перемещений. Коэффициенты при неизвестных образуют квадратную симметричную матрицу (85)
. Во многих случаях рациональный выбор основной системы может существенно упростить вычисления системы уравнений (85). Канонические уравнения представляют собой систему линейных уравнений, решение которых не представляет принципиальных трудностей, одного при большем числе уравнений трудоемко. В первую очередь надо вычислить большое число перемещений. Коэффициенты при неизвестных образуют квадратную симметричную матрицу (85)
 (86)
(86)
В представленной матрице коэффициенты δii называются главными перемещениями, а δij (i  j) побочными. Главные перемещения, расположенные по диагонали матрицы, всегда положительны, что следует из формулы Мора (80), и не могут обратиться в нуль. Побочные перемещения, расположенные симметрично по отношению к диагонали матрицы, вследствие закона взаимности перемещений соответственно равны между собой. Побочные перемещения могут быть положительными, отрицательными или обращаться в нуль. Это свойство побочных перемещений дают возможность упрощать систему уравнений (85). Необходимо выбирать основную систему так, чтобы возможно большее число побочных перемещений обратилось в нуль. Наиболее простым будет решение, если все побочные перемещения обратятся в нуль. В этом случае все неизвестные будут разделены, т.е.
j) побочными. Главные перемещения, расположенные по диагонали матрицы, всегда положительны, что следует из формулы Мора (80), и не могут обратиться в нуль. Побочные перемещения, расположенные симметрично по отношению к диагонали матрицы, вследствие закона взаимности перемещений соответственно равны между собой. Побочные перемещения могут быть положительными, отрицательными или обращаться в нуль. Это свойство побочных перемещений дают возможность упрощать систему уравнений (85). Необходимо выбирать основную систему так, чтобы возможно большее число побочных перемещений обратилось в нуль. Наиболее простым будет решение, если все побочные перемещения обратятся в нуль. В этом случае все неизвестные будут разделены, т.е.
δ11x1+ 1p= 0, δ22x2 + 2p= 0, …, δmnxn + np = 0 (87)
Конечно, такое упрощенное решение удается получить не всегда.
Для решения системы уравнений (85)существует ряд способов, в том числе в матричной форме с применением цифровых ЭВМ.
Побочные перемещения по правилу Верещагина, когда одна из эпюр моментов прямолинейна, определяются по следующим формулам:  или
или  , где yk и yn ординаты прямолинейной эпюры, расположенные под центром тяжести второй рассматриваемой эпюры, значение
, где yk и yn ординаты прямолинейной эпюры, расположенные под центром тяжести второй рассматриваемой эпюры, значение  может равняться нулю при одном из следующих ниже приведенных условий.
может равняться нулю при одном из следующих ниже приведенных условий.
1. Из двух рассматриваемых эпюр моментов, соответствующих состояниям n и k, одна эпюра симметрична, а другая – кососимметрична. Тогда при определенной δnk половина суммы будет иметь один знак, а вторая половина – противоположный.
2. На каждом из участков двух рассматриваемых эпюр моментов, соответствующих состояниям n (рис.45, а) и k (рис.45, в), в одной из эпюр моменты по всей длине участка равны нулю.
3. На протяжении каждого участка одна из эпюр прямолинейна и имеет нулевую ординату против центра тяжести другой эпюры соответствующего участка.
Поясним первое и третье правила на примере. На рис.46,а показана заданная система (нагрузка не показана, так как в данном случае это не имеет значения) и неудачный вариант основной системы (рис.46, б). Из единичных эпюр изгибающих моментов М1 – М3 (рис.46, е-д) видно, что ни одно из побочных перемещений не обращается в нуль. На рисунке 47 для той же заданной системы показана такая основная система (рис.47, а) при которой эпюры изгибающих моментов М1 (рис.47, б) и М2 (рис.47, в) симметричны, а М3 косо симметрична (рис.47, г). Тогда в соответствии с первым условием δ13=0 и δ23=0. Система уравнений распалась на две – два совместных уравнения с двумя неизвестными и одно уравнение с одним неизвестным:

 (88)
(88)
Если рама нагружена симметричной нагрузкой, дающей симметричную эпюру, то  , т.е.
, т.е.  и система лишь дважды статически неопределима. Если рама нагружена только кососимметричной нагрузкой, то
и система лишь дважды статически неопределима. Если рама нагружена только кососимметричной нагрузкой, то  , т.е.
, т.е.  и система лишь раз статически неопределима.
и система лишь раз статически неопределима.
Литература: Основная: 3[разд.2:с.32-34; 39-48]; 6[разд.2:с.47-57]
1 Чему равна работа внутренних сил и как определяется потенциальная энергия плоской системы, напишите выражения полной потенциальной энергии для плоской и пространственной стержневой систем, состоящих из прямолинейных стержней, а также дайте интерпретацию составляющим членам?
2 В чем заключается смысл теоремы о взаимности реакций, как она называется и читается?
3 Приведите доказательство теоремы о взаимности реакций и в чем заключается смысл теоремы о взаимности реакций и перемещений как она называется?
4 На чем основывается вывод формулы перемещений, и напишите формулу Мора для плоской и пространственной стержневой систем и дайте им анализ?
5 Что является основой для современных методов расчета статически неопределимых систем, сколько и какие методы применяют, а также как производится расчет в ТТ по методу сил и какой последовательности?
6 Какие уравнения называются каноническими уравнениями метода сил и что они позволяют достигнуть, систему, каких зависимостей представляют собой канонические уравнения и как производится их решение и в чем заключается смысл побочных перемещений по правилу Верещагина?
|
|
|
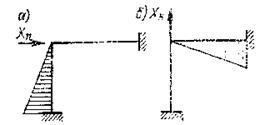

Рисунок 44 – Неразрезная балка Рисунок 46 – Пример неудачного варианта
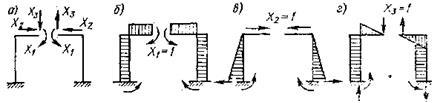
Рисунок 47 – Пример варианта основной системы с симметричными и косо симметричными эпюрами
7.Тема лекции: Расчет статически неопределимых балок и ферм.
Неразрезной называется статически неопределимая балка, которая имеет не менее двух пролетов и не имеет шарниров или разрезов. Статически неопределимой неразрезная двухпролетная балка может быть только в том случае, когда она закреплена тремя опорными стержнями, не пересекающимися в одной точке и параллельными между собой (рис.48).
http://zaochnik.com/spravochnik/matematika/prjamaja-ploskost/kanonicheskie-uravnenija-prjamoj-v-prostranstve/
http://megaobuchalka.ru/6/24272.html