Система линейных уравнений. Общее решение
Система линейных уравнений (СЛУ) может быть записана в виде
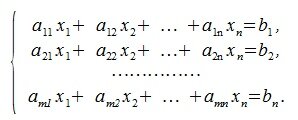
где m, n натуральные числа, aij (i= 1,2, . m, j= 1,2. n) называются коэффициентами, bi (i= 1,2. m) называются свободными членами, xi (i= 1,2. n) называются неизвестными.
Систему линейных уравнений (1) можно записать в виде
где A матрица порядка m×n , x — вектор порядка n (x∈R n ), b — вектор порядка m (b ∈R m ).
Решением системы (2) называется выбор такого вектора x’, что выполнено равенство
Если система линейных уравнений имеет хотя бы одно решение, то СЛУ называется совместным.
Если СЛУ не имеет решения, то СЛУ называется несовместным.
Если СЛУ имеет единственное решение, то СЛУ называется определенным.
Если СЛУ имеет более одного решения, то СЛУ называется неопределенным.
Система линейных уравнений (2) называется неоднородной cистемой линейных уравнений, если b≠0.
Система линейных уравнений (2) называется однородной cистемой линейных уравнений, если b=0.
Нахождение общего решения системы линейных уравнений
Общее решение системы линейных уравнений (1)((или (2))− это множество всех решений этой системы.
Пусть A m×n — матрица rankA=r. В общем случае можем предположить что r 
 .
.
Применяя метод исключения Гаусса для системы (3), получим:
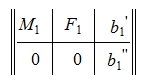
где M1 верхняя треугольная матрица, 0 — нулевые матрицы соответствующих порядков. Далее, применяя обратный ход исключения Гаусса, и, далее, разделив элементы каждой строки на ведущий элемент этой строки (если ведущий элемент существует) получим:

где E — единичная матрица порядка r×r.
Запишем (5) в виде системы линейных уравнений:
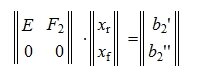
где 
Решим систему линейных уравнений (6). Для этого перезапишем в следующем виде:
Из второго уравнения системы (7) следует, что для совместности системы (6) и, следовательно, (2) (или (1)) должно выполняться условие b2»≡ 0. Если система совместна, то решаем первое уравнение системы (7) относительно вектора xr:
 | (8) |
Таким образом первые r координаты вектора x  выражены через остальные координаты
выражены через остальные координаты  . — свободные координаты, т.е. могут принимать любые значения.
. — свободные координаты, т.е. могут принимать любые значения.
Найдем, далее, множество всех векторов x, удовлетворяющих уравнению (6) и, следовательно, (2)( или (1)).
Рассмотрим множество всех векторов х, удовлетворяющих условию
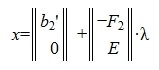 | (9) |
где λ — произвольный вектор-столбец длины n-r.
Подставляя (9) в (6) получим:



Следовательно (9) является решением системы (6) и, следовательно, (2)(или (1)). Отметим что вектор  является частным решением неоднородной системы линейных уравнений Ax=b, а
является частным решением неоднородной системы линейных уравнений Ax=b, а  является общим решением однородной системы линейных уравнений Ax=0;
является общим решением однородной системы линейных уравнений Ax=0;
Нахождение общего решения системы линейных уравнений с помощью псевдообратной матрицы
Обозначим через R(A) пространство столбцов матрицы A, т.е.
1. Пусть A n×n матрица и rank(A)=n. Тогда существует обратная к A матрица A -1 , и следовательно единственное решение СЛУ (2) примет вид:
Действительно, подставляя (3) в (2) имеем:
2. Пусть A m×n − матрица, rank(A)=r.
Система линейных уравнений имеет хотя бы одно решение
Системой m линейных уравнений с n неизвестными называется система вида

где aij и bi (i=1,…,m; b=1,…,n) – некоторые известные числа, а x1,…,xn – неизвестные. В обозначении коэффициентов aij первый индекс iобозначает номер уравнения, а второй j – номер неизвестного, при котором стоит этот коэффициент.
Коэффициенты при неизвестных будем записывать в виде матрицы  , которую назовём матрицей системы.
, которую назовём матрицей системы.
Числа, стоящие в правых частях уравнений, b1,…,bm называются свободными членами.
Совокупность n чисел c1,…,cn называется решением данной системы, если каждое уравнение системы обращается в равенство после подстановки в него чисел c1,…,cn вместо соответствующих неизвестных x1,…,xn.
Наша задача будет заключаться в нахождении решений системы. При этом могут возникнуть три ситуации:
- Система может иметь единственное решение.
- Система может иметь бесконечное множество решений. Например,
 . Решением этой системы является любая пара чисел, отличающихся знаком.
. Решением этой системы является любая пара чисел, отличающихся знаком. - И третий случай, когда система вообще не имеет решения. Например, , если бы решение существовало, то x1 + x2 равнялось бы одновременно нулю и единице.
 . Решением этой системы является любая пара чисел, отличающихся знаком.
. Решением этой системы является любая пара чисел, отличающихся знаком. , если бы решение существовало, то x1 + x2 равнялось бы одновременно нулю и единице.
, если бы решение существовало, то x1 + x2 равнялось бы одновременно нулю и единице.Система линейных уравнений, имеющая хотя бы одно решение, называется совместной. В противном случае, т.е. если система не имеет решений, то она называется несовместной.
Рассмотрим способы нахождения решений системы.
МАТРИЧНЫЙ МЕТОД РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ
Матрицы дают возможность кратко записать систему линейных уравнений. Пусть дана система из 3-х уравнений с тремя неизвестными:

Рассмотрим матрицу системы  и матрицы столбцы неизвестных и свободных членов
и матрицы столбцы неизвестных и свободных членов 

т.е. в результате произведения мы получаем левые части уравнений данной системы. Тогда пользуясь определением равенства матриц данную систему можно записать в виде
 или короче A∙X=B.
или короче A∙X=B.
Здесь матрицы A и B известны, а матрица X неизвестна. Её и нужно найти, т.к. её элементы являются решением данной системы. Это уравнение называют матричным уравнением.
Пусть определитель матрицы отличен от нуля |A| ≠ 0. Тогда матричное уравнение решается следующим образом. Умножим обе части уравнения слева на матрицу A -1 , обратную матрице A:  . Поскольку A -1 A = E и E∙X = X, то получаем решение матричного уравнения в виде X = A -1 B.
. Поскольку A -1 A = E и E∙X = X, то получаем решение матричного уравнения в виде X = A -1 B.
Заметим, что поскольку обратную матрицу можно найти только для квадратных матриц, то матричным методом можно решать только те системы, в которых число уравнений совпадает с числом неизвестных. Однако, матричная запись системы возможна и в случае, когда число уравнений не равно числу неизвестных, тогда матрица A не будет квадратной и поэтому нельзя найти решение системы в виде X = A -1 B.
Примеры. Решить системы уравнений.

Найдем матрицу обратную матрице A.
 ,
, 
Таким образом, x = 3, y = – 1.

Решите матричное уравнение: XA+B=C, где 
Выразим искомую матрицу X из заданного уравнения.

Найдем матрицу А -1 .


Решите матричное уравнение AX+B=C, где 
Из уравнения получаем  .
.

Следовательно,
Рассмотрим систему 3-х линейных уравнений с тремя неизвестными:
Определитель третьего порядка, соответствующий матрице системы, т.е. составленный из коэффициентов при неизвестных,

называется определителем системы.
Составим ещё три определителя следующим образом: заменим в определителе D последовательно 1, 2 и 3 столбцы столбцом свободных членов

Тогда можно доказать следующий результат.
Теорема (правило Крамера). Если определитель системы Δ ≠ 0, то рассматриваемая система имеет одно и только одно решение, причём

Доказательство. Итак, рассмотрим систему 3-х уравнений с тремя неизвестными. Умножим 1-ое уравнение системы на алгебраическое дополнение A11 элемента a11, 2-ое уравнение – на A21 и 3-е – на A31:

Сложим эти уравнения:

Рассмотрим каждую из скобок и правую часть этого уравнения. По теореме о разложении определителя по элементам 1-го столбца
 .
.
Далее рассмотрим коэффициенты при x2:

Аналогично можно показать, что и  .
.
Наконец несложно заметить, что 
Таким образом, получаем равенство:  .
.
Следовательно,  .
.
Аналогично выводятся равенства  и
и  , откуда и следует утверждение теоремы.
, откуда и следует утверждение теоремы.
Таким образом, заметим, что если определитель системы Δ ≠ 0, то система имеет единственное решение и обратно. Если же определитель системы равен нулю, то система либо имеет бесконечное множество решений, либо не имеет решений, т.е. несовместна.
Примеры. Решить систему уравнений

Решите систему уравнений при различных значениях параметра p: 
Система имеет единственное решение, если Δ ≠ 0.
 . Поэтому
. Поэтому  .
.

- При
- При p = 30 получаем систему уравнений которая не имеет решений.
- При p = –30 система принимает вид и, следовательно, имеет бесконечное множество решений x=y,y Î R.

 которая не имеет решений.
которая не имеет решений. и, следовательно, имеет бесконечное множество решений x=y,y Î R.
и, следовательно, имеет бесконечное множество решений x=y,y Î R.Ранее рассмотренные методы можно применять при решении только тех систем, в которых число уравнений совпадает с числом неизвестных, причём определитель системы должен быть отличен от нуля. Метод Гаусса является более универсальным и пригоден для систем с любым числом уравнений. Он заключается в последовательном исключении неизвестных из уравнений системы.
Вновь рассмотрим систему из трёх уравнений с тремя неизвестными:
 .
.
Первое уравнение оставим без изменения, а из 2-го и 3-го исключим слагаемые, содержащие x1. Для этого второе уравнение разделим на а21 и умножим на –а11, а затем сложим с 1-ым уравнением. Аналогично третье уравнение разделим на а31 и умножим на –а11, а затем сложим с первым. В результате исходная система примет вид:

Теперь из последнего уравнения исключим слагаемое, содержащее x2. Для этого третье уравнение разделим на  , умножим на
, умножим на  и сложим со вторым. Тогда будем иметь систему уравнений:
и сложим со вторым. Тогда будем иметь систему уравнений:

Отсюда из последнего уравнения легко найти x3, затем из 2-го уравнения x2 и, наконец, из 1-го – x1.
При использовании метода Гаусса уравнения при необходимости можно менять местами.
Часто вместо того, чтобы писать новую систему уравнений, ограничиваются тем, что выписывают расширенную матрицу системы:

и затем приводят её к треугольному или диагональному виду с помощью элементарных преобразований.
К элементарным преобразованиям матрицы относятся следующие преобразования:
- перестановка строк или столбцов;
- умножение строки на число, отличное от нуля;
- прибавление к одной строке другие строки.
Примеры: Решить системы уравнений методом Гаусса.

Вернувшись к системе уравнений, будем иметь


Выпишем расширенную матрицу системы и сведем ее к треугольному виду.

Вернувшись к системе уравнений, несложно заметить, что третье уравнения системы будет ложным, а значит, система решений не имеет.

Разделим вторую строку матрицы на 2 и поменяем местами первый и третий столбики. Тогда первый столбец будет соответствовать коэффициентам при неизвестной z, а третий – при x.

Вернемся к системе уравнений. 
Из третьего уравнения выразим одну неизвестную через другую и подставим в первое.

Таким образом, система имеет бесконечное множество решений.
Система линейных алгебраических уравнений. Основные термины. Матричная форма записи.
Определение системы линейных алгебраических уравнений. Решение системы. Классификация систем.
Под системой линейных алгебраических уравнений (СЛАУ) подразумевают систему
содержащую $m$ уравнений и $n$ неизвестных ($x_1,x_2,\ldots,x_n$). Прилагательное «линейных» означает, что все неизвестные (их еще называют переменными) входят только в первой степени.
Параметры $a_
Если все свободные члены $b_i=0$ ($i=\overline<1,m>$), то СЛАУ называют однородной. Если среди свободных членов есть хотя бы один, отличный от нуля, СЛАУ называют неоднородной.
Решением СЛАУ (1) называют всякую упорядоченную совокупность чисел ($\alpha_1, \alpha_2,\ldots,\alpha_n$), если элементы этой совокупности, подставленные в заданном порядке вместо неизвестных $x_1,x_2,\ldots,x_n$, обращают каждое уравнение СЛАУ в тождество.
Любая однородная СЛАУ имеет хотя бы одно решение: нулевое (в иной терминологии – тривиальное), т.е. $x_1=x_2=\ldots=x_n=0$.
Если СЛАУ (1) имеет хотя бы одно решение, ее называют совместной, если же решений нет – несовместной. Если совместная СЛАУ имеет ровно одно решение, её именуют определённой, если бесконечное множество решений – неопределённой.

Имеем систему линейных алгебраических уравнений, содержащую $3$ уравнения и $5$ неизвестных: $x_1$, $x_2$, $x_3$, $x_4$, $x_5$. Можно, сказать, что задана система $3\times 5$ линейных уравнений.
Коэффициентами системы (2) есть числа, стоящие перед неизвестными. Например, в первом уравнении эти числа таковы: 3, -4, 1, 7, -1. Свободные члены системы представлены числами 11, -65, 0. Так как среди свободных членов есть хотя бы один, не равный нулю, то СЛАУ (2) является неоднородной.
Упорядоченная совокупность $(4;-11;5;-7;1)$ является решением данной СЛАУ. В этом несложно убедиться, если подставить $x_1=4$, $x_2=-11$, $x_3=5$, $x_4=-7$, $x_5=1$ в уравнения заданной системы:
Естественно, возникает вопрос том, является ли проверенное решение единственным. Вопрос о количестве решений СЛАУ будет затронут в соответствующей теме.
Система (3) является СЛАУ, содержащей $5$ уравнений и $3$ неизвестных: $x_1$, $x_2$, $x_3$. Так как все свободные члены данной системы равны нулю, то СЛАУ (3) является однородной. Несложно проверить, что совокупность $(0;0;0)$ является решением данной СЛАУ. Подставляя $x_1=0$, $x_2=0$, $x_3=0$, например, в первое уравнение системы (3), получим верное равенство:
$$4x_1+2x_2-x_3=4\cdot 0+2\cdot 0-0=0.$$
Подстановка в иные уравнения делается аналогично.
Матричная форма записи систем линейных алгебраических уравнений.
С каждой СЛАУ можно связать несколько матриц; более того – саму СЛАУ можно записать в виде матричного уравнения. Для СЛАУ (1) рассмотрим такие матрицы:
Матрица $A$ называется матрицей системы. Элементы данной матрицы представляют собой коэффициенты заданной СЛАУ.
Матрица-столбец $B$ называется матрицей свободных членов, а матрица-столбец $X$ – матрицей неизвестных.
Используя введённые выше обозначения, СЛАУ (1) можно записать в форме матричного уравнения: $A\cdot X=B$.
Матрицы, связанные с системой, можно записать различными способами: всё зависит от порядка следования переменных и уравнений рассматриваемой СЛАУ. Но в любом случае порядок следования неизвестных в каждом уравнении заданной СЛАУ должен быть одинаков (см. пример №4).
Записать СЛАУ $ \left \ < \begin
Имеем четыре неизвестных, которые в каждом уравнении следуют в таком порядке: $x_1$, $x_2$, $x_3$, $x_4$. Матрица неизвестных будет такой: $\left( \begin
Свободные члены данной системы выражены числами -5, 0, -11, посему матрица свободных членов имеет вид: $B=\left( \begin
Перейдем к составлению матрицы системы. В первую строку данной матрицы будут занесены коэффициенты первого уравнения: 2, 3, -5, 1.
Во вторую строку запишем коэффициенты второго уравнения: 4, 0, -1, 0. При этом следует учесть, что коэффициенты системы при переменных $x_2$ и $x_4$ во втором уравнении равны нулю (ибо эти переменные во втором уравнении отсутствуют).
В третью строку матрицы системы запишем коэффициенты третьего уравнения: 0, 14, 8, 1. Учитываем при этом равенство нулю коэффициента при переменной $x_1$ (эта переменная отсутствует в третьем уравнении). Матрица системы будет иметь вид:
$$ A=\left( \begin
Чтобы была нагляднее взаимосвязь между матрицей системы и самой системой, я запишу рядом заданную СЛАУ и ее матрицу системы:
В матричной форме заданная СЛАУ будет иметь вид $A\cdot X=B$. В развернутой записи:
$$ \left( \begin
Запишем расширенную матрицу системы. Для этого к матрице системы $ A=\left( \begin
Записать СЛАУ $ \left \ <\begin
Как видите, порядок следования неизвестных в уравнениях данной СЛАУ различен. Например, во втором уравнении порядок таков: $a$, $y$, $c$, однако в третьем уравнении: $c$, $y$, $a$. Перед тем, как записывать СЛАУ в матричной форме, порядок следования переменных во всех уравнениях нужно сделать одинаковым.
Упорядочить переменные в уравнениях заданной СЛАУ можно разными способами (количество способов расставить три переменные составит $3!=6$). Я разберу два способа упорядочивания неизвестных.
Введём такой порядок: $c$, $y$, $a$. Перепишем систему, расставляя неизвестные в необходимом порядке: $\left \ <\begin
Матрица системы имеет вид: $ A=\left( \begin
$$ \left( \begin
Расширенная матрица системы такова: $\left( \begin
Введём такой порядок: $a$, $c$, $y$. Перепишем систему, расставляя неизвестные в необходимом порядке: $\left \ < \begin
Матрица системы имеет вид: $ A=\left( \begin
$$ \left( \begin
Расширенная матрица системы такова: $\left( \begin
Как видите, изменение порядка следования неизвестных равносильно перестановке столбцов матрицы системы. Но каким бы этот порядок расположения неизвестных ни был, он должен совпадать во всех уравнениях заданной СЛАУ.
Заметили ошибку, опечатку, или некорректно отобразилась формула? Отпишите, пожалуйста, об этом в данной теме на форуме (регистрация не требуется).
http://toehelp.ru/theory/math/lecture14/lecture14.html
http://math1.ru/education/sys_lin_eq/terms.html