Система линейных уравнений. Общее решение
Система линейных уравнений (СЛУ) может быть записана в виде
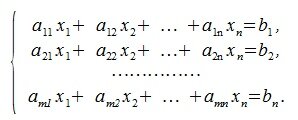
где m, n натуральные числа, aij (i= 1,2, . m, j= 1,2. n) называются коэффициентами, bi (i= 1,2. m) называются свободными членами, xi (i= 1,2. n) называются неизвестными.
Систему линейных уравнений (1) можно записать в виде
где A матрица порядка m×n , x — вектор порядка n (x∈R n ), b — вектор порядка m (b ∈R m ).
Решением системы (2) называется выбор такого вектора x’, что выполнено равенство
Если система линейных уравнений имеет хотя бы одно решение, то СЛУ называется совместным.
Если СЛУ не имеет решения, то СЛУ называется несовместным.
Если СЛУ имеет единственное решение, то СЛУ называется определенным.
Если СЛУ имеет более одного решения, то СЛУ называется неопределенным.
Система линейных уравнений (2) называется неоднородной cистемой линейных уравнений, если b≠0.
Система линейных уравнений (2) называется однородной cистемой линейных уравнений, если b=0.
Нахождение общего решения системы линейных уравнений
Общее решение системы линейных уравнений (1)((или (2))− это множество всех решений этой системы.
Пусть A m×n — матрица rankA=r. В общем случае можем предположить что r 
 .
.
Применяя метод исключения Гаусса для системы (3), получим:
где M1 верхняя треугольная матрица, 0 — нулевые матрицы соответствующих порядков. Далее, применяя обратный ход исключения Гаусса, и, далее, разделив элементы каждой строки на ведущий элемент этой строки (если ведущий элемент существует) получим:

где E — единичная матрица порядка r×r.
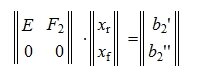
Запишем (5) в виде системы линейных уравнений:
где 
Решим систему линейных уравнений (6). Для этого перезапишем в следующем виде:
Из второго уравнения системы (7) следует, что для совместности системы (6) и, следовательно, (2) (или (1)) должно выполняться условие b2»≡ 0. Если система совместна, то решаем первое уравнение системы (7) относительно вектора xr:
 | (8) |
Таким образом первые r координаты вектора x  выражены через остальные координаты
выражены через остальные координаты  . — свободные координаты, т.е. могут принимать любые значения.
. — свободные координаты, т.е. могут принимать любые значения.
Найдем, далее, множество всех векторов x, удовлетворяющих уравнению (6) и, следовательно, (2)( или (1)).
Рассмотрим множество всех векторов х, удовлетворяющих условию
 | (9) |
где λ — произвольный вектор-столбец длины n-r.
Подставляя (9) в (6) получим:



Следовательно (9) является решением системы (6) и, следовательно, (2)(или (1)). Отметим что вектор  является частным решением неоднородной системы линейных уравнений Ax=b, а
является частным решением неоднородной системы линейных уравнений Ax=b, а  является общим решением однородной системы линейных уравнений Ax=0;
является общим решением однородной системы линейных уравнений Ax=0;
Нахождение общего решения системы линейных уравнений с помощью псевдообратной матрицы
Обозначим через R(A) пространство столбцов матрицы A, т.е.
1. Пусть A n×n матрица и rank(A)=n. Тогда существует обратная к A матрица A -1 , и следовательно единственное решение СЛУ (2) примет вид:
Действительно, подставляя (3) в (2) имеем:
2. Пусть A m×n − матрица, rank(A)=r.
Неоднородные системы
Рассматривается неоднородная система линейных уравнений Ах = b с n-неизвест-ными.
12°. (Кронекер-Капелли). Система Ах = b совместна тогда, и только тогда, когда ранг главной матрицы системы совпадает с рангом расширенной матрицы rangA =rangà (à = (A|b)).
◀ 1) Пусть система Ах = b – совместна Þ $с такой, что Ас = b т.е. c1S1 + c2S2 +…+ cnSn=b. Таким образом, последний столбец матрицы à является линейной комбинацией столбцов матрицы А Þ rangA = rangà .
13°. Если неоднородная система линейных уравнений совместна и rangA = rangà = n,то она имеет единственное решение (по теореме Крамера).
Пусть теперь rangA = rangà = r ≤ n.
14°. Разность двух различных решений неоднородной системы линейных уравнений является решением соответствующей однородной системы, т.е. если c (2) и c (1) два решения неоднородной системы Ах = b, то c (2) – c (1) решением однородной системы Ах = 0.
◀ А(c (2) – c (1) ) = Аc (2) – Аc (1) = b – b = 0,т.е. c (2) – c (1) = c (0) . Здесь через c (0) обозначено некоторое решение однородной системы. ▶
15°. Сумма любого решения однородной системы c (0) и некоторого решения неоднородной системы c (1) есть решение неоднородной системы.
Предыдущие два утверждения доказывают теорему об общем виде решения неоднородной системы и линейных уравнений.
16°. Общее решение неоднородной системы уравнений есть сумма общего решения однородной системы и некоторого частного решения неоднородной системы. Эту фразу можно записать с помощью легко запоминающейся аббревиатуры:
О. Р. Н. С. = О. Р. О. С. + Ч. Р. Н. С.
Способ решения неоднородных систем линейных уравнений таков:
1). Если rangA = rangà = n, то решение единственно и может быть найдено по Крамеру;
2). ЕслиrangA = rangà = r (неодн.) = x (частн.) + 
Система векторов <e1, e2, . en–r> называется фундаментальной системой решений для системы уравнений Ах = 0.
Если М – множество решений неоднородной системы уравнений, x (r) – некоторое частное решение неоднородной системы уравнений, L– пространство решений соответствующей линейной однородной системы, то M = x (r) + L, т.е. М – есть линейное многообразие размерности n – r.
§8. Метод Гаусса РЕШЕНИЯ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ. (метод исключения неизвестных)
Решить систему уравнений:  .
.
Записав расширенную матрицу системы, преобразуем ее с помощью преобразований не изменяющих ранг матрицы. Цель: в первом столбце все элементы, кроме одного, должны стать равными нулю. Это равносильно тому, что из 2 го , 3 го и 4 го уравнений будет исключена неизвестная х1. Для достижения цели первую строку, умноженную на 2, –3 и –1 прибавим, соответственно, к 2 ой , 3 ей и 4 ой строке. Получим:

 .
.
Примечание: здесь и в дальнейшем знак
, стоящий между двумя матрицами означает, что справа и слева от этого знака стоят матрицы одинакового ранга и, следовательно, системы линейных уравнений с такими матрицами имеют одинаковые решения.
Далее вторую строку, умноженную на –1 прибавим к 4 ой строке, тем самым исключив х2 из третьего и четвертого уравнений и, наконец исключим х3 из 4 го уравнения, прибавив третью строку, умноженную на –1 к четвертой:
 .
.
Имеем rangA = rangà = 3. Система совместна. n – r =5 –3 = 2, dimL =dimM =2. Так как, размерность пространства решений однородной системы равна 2, то в системе имеется две свободных неизвестных. Выберем в качестве свободных переменных х3, х4. Отделим в матрице свободные неизвестные вертикальной пунктирной линией:  .
.
Далее рассмотрим однородную систему уравнений с матрицей  . Тогда
. Тогда
 .
.
Если положить х4 = х5 = 0, то получим х3 = 14, х2 = –3, х1 = –3, т.е. (–3, –3, 14, 0, 0) еще одно частное решение данной системы. Следовательно, общее решение исходной системы можно записать и в таком виде: х = (–3, –3, 14, 0, 0) + a(2, 2, –6, 1, 0) + b(2, 2, –7, 0, 1), где a, b – любые.
Нужно обратить внимание и на то, что разность двух частных решений неоднородной системы (–3, –3, 14, 0, 0) – (1, 1, 1, 1, 1) есть решение соответствующей однородной системы уравнений.
§9. «Альтернатива Фредгольма»
Для квадратной системы  (j =1, 2, …, п):
(j =1, 2, …, п):
а) или система имеет решение, притом единственное при любых bj, если соответствующая однородная система имеет только тривиальное решение (detA ≠0),
б) или соответствующая однородная система имеет ненулевые решения (detA = 0) и, следовательно, есть такие bj, при которых система не имеет решений.
Система линейных уравнений является неоднородной
Пусть задана неоднородная система линейных алгебраических уравнений размерности m × n .
Матрица  называется расширенной матрицей системы, если наряду с коэффициентами при неизвестных, она содержит столбец свободных членов. Следовательно, размерность равна m × (n+1) .
называется расширенной матрицей системы, если наряду с коэффициентами при неизвестных, она содержит столбец свободных членов. Следовательно, размерность равна m × (n+1) .
Исследование любой системы линейных алгебраических уравнений начинается с преобразования ее расширенной матрицы методом Гаусса , который основан на следующих элементарных преобразованиях:
– перестановка строк матрицы;
– умножение строк матрицы на действительное отличное от руля число;
– поэлементное сложение строк матрицы;
– вычеркивание нулевой строки;
– транспонирование матрицы (в этом случае преобразования производятся по столбцам).
Элементарные преобразования приводят первоначальную систему к системе, ей эквивалентной. Системы называются эквивалентными, если они имеют одно и то же множество решений.
Рангом матрицы называется наивысший порядок отличных от нуля ее миноров. Элементарные преобразования ранга матрицы не меняют.
На вопрос о наличии решений у неоднородной системы линейных уравнений отвечает следующая теорема.
Теорема 1.3 (теорема Кронекера-Капелли). Неоднородная система линейных алгебраических уравнений совместна тогда и только тогда, когда ранг расширенной матрицы системы равен рангу ее главной матрицы, то есть 
Обозначим количество строк, оставшихся в матрице после метода Гаусса, через r (соответственно, в системе остается r уравнений). Эти строки матрицы называются базисными.
Если r = n , то система имеет единственное решение (является совместной определенной), ее матрица элементарными преобразованиями приводится к треугольному виду. Такую систему можно решить также методом Крамера и с помощью обратной матрицы .
Если r n (количество переменных в системе больше количеств а уравнений), матрица элементарными преобразованиями приводится к ступенчатому виду. Такая система имеет множество решений и является совместной неопределенной. В данном случае для нахождения решений системы необходимо выполнить ряд операций.
1. Оставить в левых частях уравнений системы r неизвестных (базисные переменные), остальные n — r неизвестных перенести в правые части (свободные переменные). После разделения переменных на базисные и свободные система принимает вид:
2. Из коэффициентов при базисных переменных составить минор (базисный минор), который должен быть отличен от нуля.
3. Если базисный минор системы (1.10) равен нулю, то одну из базисных переменных следует заменить на свободную; полученный базисный минор снова проверить на отличие от нуля.
4. Применяя формулы (1.6) метода Крамера, считая правые части уравнений их свободными членами, найти выражение базисных переменных через свободные в общем виде. Полученный при этом упорядоченный набор переменных системы является ее общим решением.
5. Придавая свободным переменным в (1.10) произвольные значения, вычислить соответствующие значения базисных переменных. Получаемый при этом упорядоченный набор значений всех переменных называется частным решением системы, соответствующим данным значениям свободных переменных. Система имеет бесконечное множество частных решений.
6. Получить базисное решение системы – частное решение, получаемое при нулевых значениях свободных переменных.
Заметим, что количество базисных наборов переменных системы (1.10) равно числу сочетаний из n элементов по r элементов Cn r . Так как каждому базисному набору переменных соответствует свое базисное решение, следовательно, количество базисных решений у системы также равно Cn r .
Пусть строки матрицы обозначены соответственно l 1 ; l 2 ;…; ln . Строка l называется линейной комбинацией строк l 1 ; l 2 ;…; ln матрицы, если она равна сумме произведений этих строк на произвольные действительные числа, то есть ,  .
.
Однородная система уравнений всегда совместна, так как имеет хотя бы одно – нулевое (тривиальное) решение. Для того чтобы однородная система n линейных уравнений с n переменными имела ненулевые решения, необходимо и достаточно, чтобы ее главный определитель ∆ был равен нулю. Это означает, что ранг r ее главной матрицы меньше числа n неизвестных ( r n ) . В этом случае исследование однородной системы уравнений на общее и частные решения проводится аналогично исследованию неоднородной системы. Решения однородной системы уравнений обладают важным свойством: если известны два различных решения однородной системы линейных алгебраических уравнений, то их линейная комбинация также является решением этой системы. Нетрудно убедиться в справедливости следующей теоремы.
Теорема 1.4. Общее решение неоднородной системы уравнений представляет собой сумму общего решения соответствующей однородной системы и некоторого частного решения неоднородной системы уравнений 
Пример 1.7. Исследовать заданную систему уравнений и найти одно частное решение:
Решение. Выпишем расширенную матрицу системы и применим к ней элементарные преобразования:


Так как r ( A ) =2 и  , то по теореме 1.3 (Кронекера-Капелли) заданная система линейных алгебраических уравнений совместна. Количество переменных n =2 , т.е. r n , значит, система является неопределённой. Количество базисных наборов переменных системы равно
, то по теореме 1.3 (Кронекера-Капелли) заданная система линейных алгебраических уравнений совместна. Количество переменных n =2 , т.е. r n , значит, система является неопределённой. Количество базисных наборов переменных системы равно  . Следовательно, базисными могут быть 6 комплектов переменных: < x 1 ; x 2 >, < x 1 ; x 3 >, < x 1 ; x 4 >, < x 2 ; x 3 >, < x 2 ; x 4 >, < x 3 ; x 4 > . Рассмотрим один из них < x 1 ; x 2 > . Тогда систему, полученную в результате метода Гаусса, можно переписать в виде
. Следовательно, базисными могут быть 6 комплектов переменных: < x 1 ; x 2 >, < x 1 ; x 3 >, < x 1 ; x 4 >, < x 2 ; x 3 >, < x 2 ; x 4 >, < x 3 ; x 4 > . Рассмотрим один из них < x 1 ; x 2 > . Тогда систему, полученную в результате метода Гаусса, можно переписать в виде  . Главный определитель
. Главный определитель  . С помощью метода Крамера ищем общее решение системы.
. С помощью метода Крамера ищем общее решение системы.
По формулам (1.6) имеем
Данное выражение базисных переменных через свободные представляет собой общее решение системы:
При конкретных значениях свободных переменных из общего решения получаем частное решение системы. Например, частное решение  соответствует значениям свободных переменных x 3 = x 4 = 17 . При x3=0 x4=0 получаем базисное решение системы
соответствует значениям свободных переменных x 3 = x 4 = 17 . При x3=0 x4=0 получаем базисное решение системы 
http://helpiks.org/3-38311.html
http://www.sites.google.com/site/vyssaamatem/kupit-sklad/i-5-issledovanie-neodnorodnyh-sistem-linejnyh-algebraiceskih-uravnenij