ЛЕКЦИЯ 3 ТЕМА: УРАВНЕНИЯ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА КАК ТВЕРДОГО ТЕЛА. ПРОДОЛЬНОЕ И БОКОВОЕ ДВИЖЕНИЕ
- Евгений Перхуров 5 лет назад Просмотров:
1 1 Направления подготовки: Авионика Аэронавигация Системная инженерия Бортовые системы управления Дисциплина: Курс, семестр, уч. год: 3, весенний, 11/1 Кафедра: 31 СУЛА Руководитель обучения: ассистент Копысов Олег Эдуардович ЛЕКЦИЯ 3 ТЕМА: УРАВНЕНИЯ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА КАК ТВЕРДОГО ТЕЛА. ПРОДОЛЬНОЕ И БОКОВОЕ ДВИЖЕНИЕ Движение ЛА, как твѐрдого тела в связанной системе координат описывается уравнениями Эйлера (шесть нелинейных дифференциальных уравнений второго порядка). Силы и моменты, входящие в эти уравнения, сложным образом зависят от высоты, скорости и режима полѐта и меняются во времени, г. к. изменяются условия полѐта, например из-за изменения массы и момента инерции ЛА в результате расхода топлива или сброса груза. При аналитическом исследовании процессов управления ЛА его уравнения движения, как правило, упрощают, рассматривая два независимые друг от друга движения: продольное и боковое. К продольному относят поступательные движения ЛА вдоль осей ОХ и ОY и вращательное движение вокруг оси O. К боковому движению относят поступательное вдоль оси O и вращательные движения вокруг осей ОХ и ОY. Продольное движение. Обобщенная математическая модель При продольном движении ЛА вектор V линейной скорости его центра масс находится в вертикальной плоскости. Внешние силы, действующие на ЛА: Р сила тяги двигателей, вектор которой направлен вдоль оси ОХ: Х а сила лобового сопротивления, вектор которой направлен против вектора V, т.е. в отрицательную сторону оси ОХ а Y а подъѐмная сила, вектор которой перпендикулярен вектору V mg вес ЛА (m масса ЛА, g ускорение свободного падения). Вращение ЛА в плоскости
2 Х а Y а возможно под действием момента М, действующего вокруг оси O а, который называется аэродинамическим моментом тангажа. В соответствии с рис. 3.1 имеют место кинематические соотношения:, (3.1) где ϑ угол тангажа θ угол наклона траектории движения центра масс (ЦМ) ЛА ω угловая скорость тангажа. Рисунок 3.1 Внешние силы, действующие на ЛА в продольном движении Вращательное движение ЛА вокруг оси O а описывается уравнением: I, (3.) где I момент инерции ЛА относительно оси O а М момент аэродинамических сил, который можно представить в виде: mba S V, (3.3) где т коэффициент момента b а — хорда крыла ρ плотность воздуха S площадь крыльев. Коэффициент т можно представлять состоящим из суммы трех слагаемых, два из которых зависят от статических параметров (α, V, δ в ) и определяют статический момент, а третий от динамических параметров ( ), и определяет демпфирующий момент.
3 3 Спроектируем силы, действующие на ЛА, на касательную к траектории полѐта (ось X) и на нормаль к ней (ось Y). Сумма проекций сил на касательную к траектории: dv m mv P cos X a mg sin. dt (3.4) При определении проекций сил на нормаль к траектории нужно иметь в виду, что при движении ЛА по искривленной траектории с радиусом кривизны r, на него действует центробежная сила инерции mv траектории), a ds = Vdt, то / mv mv mv d r. Так как r = ds/dθ (s длина дуги mv mv. r ds / d Vdt / d dt Следовательно, сумма проекций сил на нормаль к траектории: mv Y Psin mg cos. a (3.5) Сила тяги Р зависит от параметров двигателя, от внешних условий, характеризуемых скоростью полѐта V, высотой полѐта Н и параметра управления двигателем δ р, т. е. в общем виде Р = Р(V, Н, δ р ). Аэродинамические силы Х а и Y а зависят от угла атаки α, скорости полѐта V, плотности воздуха ρ и угла отклонения руля высоты δ в. Так как угол δ в практически не влияет на величины Х а и Y а, то этим влиянием пренебрегают и представляют их обычно в виде: где X a CxaS V Ya CyaS V, (3.6) C xa, C ya коэффициенты лобового сопротивления и подъемной силы, зависящие от угла атаки и скорости полета. Система нелинейных дифференциальных уравнений (3.), (3.4), (3.5) с учѐтом (3.1), (3.3), (3.6) является математической моделью продольного движения ЛА. Известно, что для пилотируемых ЛА самолетной схемы практически для всех компоновок и большинства режимов полета, собственное движение ЛА состоит из двух колебательных движений, отличающихся частотой и степенью затухания. Эти движения называются короткопериодическими и длиннопериодическими или фуго-
4 идными. Причиной возникновения короткопериодических движений является нарушение равновесия моментов вокруг оси O a, что приводит к вращению ЛА относительно ЦМ и изменению углов α и ϑ. Скорость невозмущѐнного линейного движения при этом практически не изменяется. Причиной возникновения длиннопериодических движений является нарушение внешних сил, действующих в продольной плоскости симметрии ЛА, следствием чего является изменение скорости его полета. 4 Линеаризованные уравнения продольного движения ЛА Применяя к уравнениям (3.), (3.4), (3.5) метод малых возмущений, могут быть получены линейные уравнения продольного движения ЛА. Предположим, что на исследуемом участке полета невозмущенное движение ЛА характеризуется постоянными силами X, Y, P, и параметрами V, α, ϑ, θ, H и ω z =, а параметры управления δ В, δ р также постоянны. Если исследуется участок полета, на котором параметры движения существенно меняются, его разбивают на несколько участков, на которых параметра движения можно считать постоянными. Уравнения невозмущѐнного движения ЛА на участке с постоянными параметрами следуют из уравнений (3.), (3.4), (3.5): P cos X mg sin Y P sin mg cos. Из первых двух уравнений системы следует отношение: P cos X tg, P sin Y (3.7) из которого можно заключить, что при P cos X ЛА летит горизонтально, при P cos X набирает высоту ( ), а при P cos X уменьшает высоту ( ).
5 Если в некоторый момент времени параметры движения и управления изменились на величины V. то соответствующие параметры P возмущѐнного движения принимают вид: V V V P P P. При изучении продольного углового движения ЛА в области малых изменений параметров движения первое уравнение системы (3.7) из рассмотрения можно исключить, т.к. оно представляет сумму проекций сил на ось ОХ a (рис. 3.1), не влияющих на угловое движение ЛА. При линеаризации второго уравнения системы (3.7) полагают, что проекция силы тяжести на ось OY a не оказывает влияния на угловое движение ЛА, и этой составляющей можно пренебречь. В результате известных процедур линеаризации могут быть получены простейшие уравнения продольного движения ЛА: mv Y I (3.8), где постоянные коэффициенты соответствуют исходному невозмущѐнному движению и определяются следующим образом: Y Y ( Pcos ) ( ) ( ) ( ). 5
6 Рассмотрим аэродинамические моменты в уравнениях (3.8), определяющих короткопериодическое движение ЛА. При >, что обычно имеет место, момент называется моментом продольной статической устойчивости, который является следствием воздействия набегающего воздушного потока на хвостовое горизонтальное оперение, от размеров и формы которого главным образом и зависит. При невозмущѐнном движении ЛА угол атаки и аэродинамический момент относительно поперечной оси отсутствует. Восходящие или нисходящие потоки воздуха приводят к изменению угла атаки на величину например изменения центровки ЛА. Величина, который может измениться и из-за других причин, приводит к увеличению подъѐмной силы крыльев, следствием чего является изменение высоты полѐта ЛА, и к увеличению на Y подъѐмной силы горизонтального хвостового оперения, которая приложена в центре давления (ЦД) на плече L ГО, что и создаѐт момент Y L ГО, возвращающий ЛА к прежнему углу атаки, т.е. (рис. 3.). Таким образом, момент обеспечивает продольную устойчивость ЛА, если центр давления аэродинамических сил находится за центром масс ЛА в сторону хвостового оперения. Если ЦМ и ЦД совпадают, то 6 = (нейтральный ЛА), если ЦД находится впереди ЦМ, то 7 еѐ увеличение средствами аэродинамики приводит к увеличению воздействия на ЛА аэродинамических возмущений. 7 Рисунок 3. Определение момента продольной статической устойчивости Рисунок 3.3 Определение момента демпфирования тангажа Управляющий момент появляется при отклонении руля высоты хвостового горизонтального оперения, вследствие чего изменяется его угол атаки. Физическая картина воздействия этого момента на ЛА аналогична влиянию момента продольной статической устойчивости (статической устойчивости тангажа). На руль высоты, отклонѐнный от нейтрального положения на угол, действует аэродинамическая сила Y РВ, направленная перпендикулярно набегающему потоку воздуха и приложенная в ЦД рулевой поверхности (рис. 3.4), который, как правило, не совпадает с ее осью вращения (ОВ). Сила Y РВ относительно оси вращения создает так называемый шарнирный момент, который является основным нагрузочным моментом для привода, осуществляющего разворот руля высоты. В точке, соответствующей ОВ, можно приложить две противоположно направленных силы Y РВ, равных по модулю Y РВ.
8 8 Рисунок 3.4 Определение управляющего момента по высоте Тогда можно записать равенство, Y ‘ L Y ‘ l Y L из которого P P P P следует, что управляющий момент, приложенный к ЛА, состоит из суммы шарнирного момента, действующего относительно ОВ руля и момента силы Y РВ на плече L относительно ЦМ ЛА. Вернемся к уравнениям системы (3.8) и перепишем их в переменных приращений углов тангажа где и атаки : I mv ( ) Y F. Y (3.9), F Y возмущающие момент и сипа, действующие соответственно относительно оси O а и вдоль оси OY а. Уравнения системы (3.9) перепишем в виде: где a1 a a3 a a a a a 5 a F, 6 Y Y. a I I I 4 1, a 1 5, a6. I mv mv (3.1) (3.11) Постоянные коэффициенты в (3.11), соответствующие невозмущѐнному движению, определяются следующим образом:
9 m qsb m qsl m qsb Y c, yqs (3.1) где q V / скоростной напор b хорда крыла. 9 Боковое движение Аэродинамические силы и моменты, действующие на ЛА Боковое движение ЛА включает вращение вокруг продольной оси ОХ, нормальной оси ОY и линейное перемещение вдоль оси O. Рассмотрим основные аэродинамические силы и моменты, действующие на ЛА (рис. 3.5). Предположим, что вследствие какого-либо возмущения ЛА относительно нормальной системы координат ОХ g Y g g получил крен на угол γ, после чего возмущение исчезло. Угол γ определяет положение связанной системы координат ОХY, причѐм т. О совпадает с центром масс ЛА самолѐтной схемы. Плоскости крыльев относительно плоскости Х располагаются под углом φ. При положительном крене (на правое крыло) вдоль оси O появляется составляющая mg sin силы веса ЛА, под действием которой возникает скольжение ЛА со скоростью V VXtg ( V X продольная составляющая скорости V, β угол скольжения). Вследствие скольжения нарушается симметрия обтекания крыльев воздушным потоком. Для иллюстрации указанного обстоятельства на концах правого и левого крыльев построены треугольники воздушных скоростей ( V к составляющая скорости V набегающего воздушного потока вдоль крыльев V I — составляющая, перпендикулярная вектору скорости V ), из которых следует VI V tg. Так как скорости V 1 на правом и левом крыльях направлены в разные стороны, происходит изменение их углов атаки, что иллюстрируется построением треугольников скоростей на векторах скоростей V X и V I, из которых следует V / V. При этом на правом крыле имеет место положительное приращение I X угла атаки (+ ), а на другом отрицательное ( ).
10 1 Рисунок 3.5 Определение моментов статической устойчивости крена и пути Соответственно подъемная сила правого крыла увеличится на ΔY, а левого уменьшится на ΔY. В результате относительно оси ОХ образуется момент поперечной статической устойчивости или момент статической устойчивости крена, первопричиной которого является скольжение и который обозначается в виде, х М где ( х ) х. Очевидно, что этот момент тем больше, чем больше изменение угла, величина которого в соответствии с приведенными выше соотношениями, может быть представлена в виде: VI Vtg Vxtgtg, V V V x x x откуда следует, что чем больше угол φ, тем больше момент поперечной устойчивости. Стреловидность крыльев в плане также приводит к появлению момента поперечной устойчивости. Изменение углов атаки приводит к изменению сил лобового сопротивления на крыльях: на правом крыле эта сила увеличится на величину ΔХ, а на левом умень-
11 шится на ΔХ. С появлением угла β возникает также сила Δ на вертикальном оперении. Следствием указанных сил является возникновение флюгерного момента, или момента статической устойчивости пути, который старается развернуть ЛА в сторону набегающего воздушного потока. Этот момент обеспечивает устойчивость по углу скольжения, стремясь так развернуть ЛА, чтобы установился угол скольжения, имевший место до возмущения. Момент статической устойчивости пути обозначается в виде, где ( М y ) y y. 11 Используя литературные источники, найти графические зависимости коэффициента продольного момента от угла атаки и отклонения руля высоты, зависимость коэффициентов С ха, С уа от угла атаки. Термины для занесения в тезаурус: продольное движение, боковое движение, коэффициент лобового сопротивления, коэффициент подъемной силы, невозмущенное движение летательного аппарата, момент статической устойчивости, шарнирный момент.
ПОЛНАЯ СИСТЕМА УРАВНЕНИЙ ДВИЖЕНИЯ САМОЛЕТА
В случае анализа динамики самолета, совершающего полет со скоростью, значительно меньшей орбитальной, уравнения движения по сравнению с общшм случаем полета летательного аппарата [13] могут быть упрощены, в частности, можно пренебречь вращением и сферичностью Земли. Кроме этого сделаем еще ряд упрощающих допущений.
Будем считать, что самолет представляет собой абсолютно жесткое тело. Влияние упругости конструкции будем учитывать
только квазистатически, для текущего значения скоростного напора.
Будем считать, что масса и моменты инерции самолета на рассматриваемых интервалах времени неизменны и соответствуют исходному состоянию равновесного полета.
Будем считать, что конфигурация самолета имеет плоскость симметрии и что массы распределены симметрично по отношению к этой плоскости.
При анализе устойчивости и управляемости самолета будем использовать следующие прямоугольные правые системы осей координат.
Нормальная земная система координат OXgYgZg. Эта система осей координат имеет неизменную ориентацию относительно Земли. Начало координат совпадает с центром масс (ЦМ) самолета. Оси 0Xg и 0Zg лежат в горизонтальной плоскости. Их ориентация может быть принята произвольно, в зависимости от целей решаемой задачи. При решении навигационных задач ось 0Xg часто направляют к Северу параллельно касательной к меридиану, а ось 0Zg направляют на Восток. Для анализа устойчивости и управляемости самолета удобно принять направление ориентации оси 0Xg совпадающим по направлению с проекцией вектора скорости на горизонтальную плоскость в начальный момент времени исследования движения. Во всех случаях ось 0Yg направлена вверх по местной вертикали, а ось 0Zg лежит в горизонтальной плоскости и образует вместе с осями OXg и 0Yg правую систему осей координат (рис. 1.1). Плоскость XgOYg называют местной вертикальной плоскостью.
Связанная система координат OXYZ. Начало координат расположено в центре масс самолета. Ось ОХ лежит в плоскости симметрии и направлена вдоль линии хорд крыла (либо параллельно какому-либо другому, фиксированному относительно самолета направлению) к носовой части самолета. Ось 0Y лежит в плоскости симметрии самолета и направлена вверх (при горизонтальном полете), ось 0Z дополняет систему до правой.
Углом атаки а называется угол между продольной осью самолета и проекцией воздушной скорости на плоскость OXY. Угол положителен, если проекция воздушной скорости самолета на ось 0Y отрицательна.
Углом скольжения р называется угол между воздушной скоростью самолета и плоскостью OXY связанной системы координат. Угол положителен, если проекция воздушной скорости на поперечную ось положительна.
Положение связанной системы осей координат OXYZ относительно нормальной земной системы координат OXeYgZg может быть полностью определено тремя углами: ф, #, у, называемыми углами. Эйлера. Последовательно поворачивая связанную систему
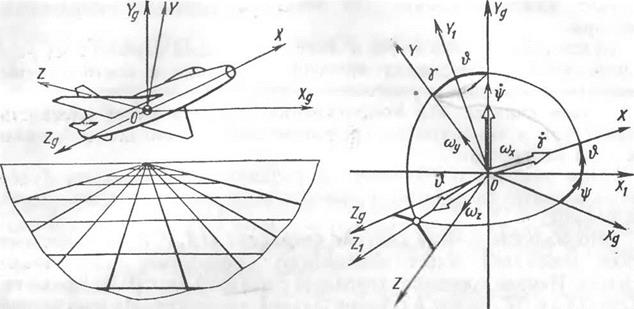
Рис. 1.L Нормальная земная OXgYgZg и связанная OXYZ системы координат Рис, 1.2, Углы Эйлера, используемые при исследовании динамики самолетов
координат на каждый из углов Эйлера, можно прийти к любому угловому положению связанной системы относительно осей нормальной системы координат.
При исследовании динамики самолетов используются следующие понятия углов Эйлера.
Угол рыскания г]) — угол между некоторым исходным направлением (например, осью 0Xg нормальной системы координат) и проекцией связанной оси самолета на горизонтальную плоскость. Угол положителен, если ось ОХ совмещается с проекцией продольной оси на горизонтальную плоскость поворотом вокруг оси OYg по часовой стрелке.
Угол тангажа # — угол между продольно# осью самолета ОХ и местной горизонтальной плоскостью OXgZg, Угол положителен, если продольная ось находится выше горизонта.
Угол крена у — угол между местной вертикальной плоскостью, проходящей через ось ОХ у и связанной осью 0Y самолета. Угол положителен, если ось О К самолета совмещается с местной вертикальной плоскостью поворотом вокруг оси ОХ по часовой стрелке. Углы Эйлера могут быть получены последовательными поворотами связанных осей относительно нормальных осей. Будем считать, что нормальная и связанная системы координат в начале совмещены. Первый поворот системы связанных осей произведем относительно оси О на угол рыскания г]; (ф совпадает с осью OYgXрис. 1.2)); второй поворот —относительно оси 0ZX на угол Ф (‘& совпадает с осью OZJ и, наконец, третий поворот произведем относительно оси ОХ на угол у (у совпадает с осью ОХ). Проектируя векторы ф, Ф, у, являющиеся составляющими
вектора угловой скорости движения самолета относительно нормальной системы координат, на связанные оси, получим уравнения связи между углами Эйлера и угловыми скоростями вращения связанных осей:
со2 = ф cos у — ф cos Ф sin у.
При выводе уравнений движения центра масс самолета необходимо рассматривать векторное уравнение изменения количества движения
где ю — вектор скорости вращения связанных с самолетом осей;
R — главный вектор внешних сил, в общем случае аэродинами-
ческих сил и тяги; G — вектор гравитационных сил.
Из уравнения (1.2) получим систему уравнений движения ЦМ самолета в проекциях на связанные оси:
°ixVz) = Ry + G!!’ (1 -3)
т iy’dt “Ь У — = Rz + Gz>
где Vx, Vy, Vz — проекции скорости V; Rx, Rz — проекции
результирующих сил (аэродинамических сил и тяги); Gxi Gyy Gz — проекции силы тяжести на связанные оси.
Проекции силы тяжести на связанные оси определяются с использованием направляющих косинусов (табл. 1.1) и имеют вид:
Gy = — G cos ft cos у; (1.4)
GZ = G cos d sin y.
При полете в атмосфере, неподвижной относительно Земли, проекции скорости полета связаны с углами атаки и скольжения и величиной скорости (V) соотношениями
Vх = V cos a cos р;
 Vу = — V sin a cos р;
Vу = — V sin a cos р;
УРАВНЕНИЯ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА
Обычно при анализе движения ЛА его рассматривают как абсолютно жёсткое тело. В этом случае в У. д. можно выделить две группы уравнений: У. д. центра масс (ЦМ) и У. д. относительно ЦМ. Если пренебречь вращением Земли, У. д. ЦМ ЛА можно представить в виде:
Аэродинамические силы и моменты) и тягу Р двигательной установки, на оси координат. Выбор СК зависит от решаемой задачи. Часто используется траекторная СК; в этом случае»>
где m — масса ЛА, Vi (i = х, у, z), (Ω)i, gi, Ri — проекции векторов скорости V ЛА и его угловой скорости (Ω) в выбранной системе координат (СК), ускорения свободного падения g действующей на ЛА активной силы R, включающей аэродинамическую. силу RA (см. Аэродинамические силы и моменты) и тягу Р двигательной установки, на оси координат. Выбор СК зависит от решаемой задачи. Часто используется траекторная СК; в этом случае
(), () = () = 0.
Если пренебречь кривизной земной поверхности, что допустимо при скоростях полёта, значительно меньших первой космической, то
где (ψ)а — скоростной угол рыскания, (Θ) — угол наклона траектории, и У.д. ЦМ принимают вид:
угол атаки, (β) — угол скольжения, (γ)a — скоростной угол крена, Ха, Yа, Zа — аэродинамическое сопротивление, подъёмная и боковая силы. Приведённая система уравнений дополняется кинематическими соотношениями, определяющими положение ЦМ ЛА, которые в рассматриваемом случае имеют вид:»>
где (φ) — угол заклинения тяги (угол между направлением тяги и продольной осью ЛА), (α) — угол атаки, (β) — угол скольжения, (γ)a — скоростной угол крена, Ха, Yа, Zа — аэродинамическое сопротивление, подъёмная и боковая силы. Приведённая система уравнений дополняется кинематическими соотношениями, определяющими положение ЦМ ЛА, которые в рассматриваемом случае имеют вид:
(здесь Н — высота полёта, Х и Z — продольная и боковая дальности).
Вторая группа У. д. имеет наиболее простой вид в связанной СК, оси которой направлены по главным осям инерции ЛА:
где (ω)x, y, z — соответственно скорости крена, рыскания и тангажа, Мх, у, z — проекции вектора полного момента М действующих на ЛА сил (аэродинамические и тяги) на соответствующие оси СК, Iх, y, z — главные моменты инерции ЛА. Эта система уравнений дополняется кинематическими соотношениями, определяющими изменения углов тангажа, рыскания и крена (соответственно (), (ψ) и (γ)):
• При отсутствии ветровых возмущений углы (α), (β) и (γ)a определяются с помощью равенств:
(подразумевается, что углы (γ) и (γ)a отсчитываются от одного и того же направления). Приведённые уравнения при необходимости дополняются уравнениями, определяющими изменения массы и моменты инерции ЛА вследствие выгорания топлива.
Входящие в уравнения аэродинамические силы и моменты, тяга двигательной установки являются функциями высоты и скорости полёта, угловых скоростей, углов атаки и скольжения и др. параметров. Задавшись конкретными выражениями для этих функций, можно замкнуть систему У. д. и проинтегрировать её. См. также Боковое движение, Продольное движение.
Авиация: Энциклопедия. — М.: Большая Российская Энциклопедия . Главный редактор Г.П. Свищев . 1994 .
http://ooobskspetsavia.ru/2015/09/15/polnaya-sistema-uravnenij-dvizheniya-samoleta/
http://rus-techichnical-enc.slovaronline.com/2735-%D0%A3%D1%80%D0%B0%D0%B2%D0%BD%D0%B5%D0%BD%D0%B8%D1%8F%20%D0%B4%D0%B2%D0%B8%D0%B6%D0%B5%D0%BD%D0%B8%D1%8F%20%D0%BB%D0%B5%D1%82%D0%B0%D1%82%D0%B5%D0%BB%D1%8C%D0%BD%D0%BE%D0%B3%D0%BE%20%D0%B0%D0%BF%D0%BF%D0%B0%D1%80%D0%B0%D1%82%D0%B0