Метод Гаусса и СЛАУ
Время чтения: 20 минут
Иоганн Карл Фридрих Гаусс (1777-1855) немецкий математик, физик, механик, геодезист и астроном. Его называют «королём математиков». Гаусс внес величайший вклад в науку. Во всех областях математики он провёл фундаментальные исследования: в алгебре, в теории вероятностей, в теории чисел, в теории функций комплексного переменного, в дифференциальной и неевклидовой геометрии, в математическом анализе, в аналитической и небесной механике, в астрономии, в физике и в геодезии. Но метод Гаусса не был им открыт. Он был известен за долго до рождения математика. Впервые этот метод упоминается в китайском трактате «Математика в девяти книгах», возраст которого датируется примерно с ІІ в. до н. э.
СЛАУ: определение, виды систем
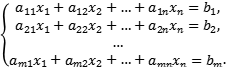
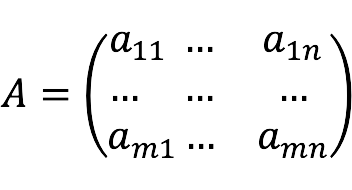
Системой линейных алгебраических уравнений (СЛАУ), содержащей m линейных уравнений и n неизвестных, называется система вида
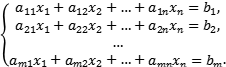
Число уравнений \[m\] не обязательно совпадает с числом неизвестных n. Особенности системы линейных алгебраических уравнений:
- Уравнение не обязательно заранее на совместность.
- Есть возможность при помощи метода Гаусса приводить к результату при сравнительно небольшом количестве вычисленных операций.
- Можно решать такие системы уравнений, у которых определитель основной матрицы равняется нулю или количество уравнений не совпадает с числом неизвестных переменных.
Система линейных алгебраических уравнений может иметь:
- Одно решение;
- Много решений;
- Не имеет решений.
Если решений нет тогда СЛАУ называется несовместима, если есть — совместимой. Если решение одно, тогда система линейных алгебраических уравнений называется определённой, если решений несколько – неопределённой.
Метод Гаусса и метод последовательного исключения неизвестных
Метод Гаусса – это метод решение квадратных систем линейных алгебраических уравнений (СЛАУ), суть которого заключается в последовательном исключение неизвестных переменных с помощью элементарных преобразований строк.
Прямой ход метода Гаусса – это поочерёдное преобразования уравнений системы для последующего избавления от переменных неизвестных.
Обратный ход метода Гаусса – это вычисление переменных неизвестных от последнего уравнения к первому.
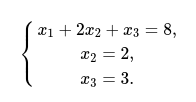
Решение уравнений методом Гаусса
Пример №1 решение уравнений методом Гаусса:
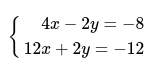
С первой строки определяем х. Сначала -2у переносим на другую сторону уравнения, а затем обе стороны делим на 4.
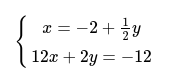
Теперь во второе уравнение системы подставляем значение х. Находим у.
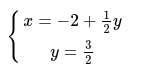
Теперь когда у нас есть значение у, ми возвращаемся в первое уравнение и определяем х.
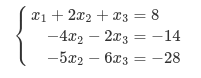
Пример №2.
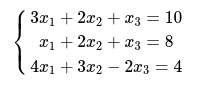
Для упрощение перепишем уравнение так, чтобы на первом месте была строка с коэффициентом 1.
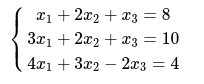
Теперь последовательно исключаем \[x_<1>\] с последующих строк. Для исключения с второго уравнения обе части первого уравнение надо умножаем на -3, а затем сложить с вторым.
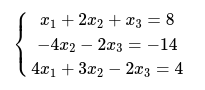
Так же и с третьим уравнением, только умножение на -4.
Теперь приводим уравнение к ступенчатому виду. Нужно сделать так, чтобы во второй строке возле \[x_<2>\] стала 1. Значит нам надо обе части уравнения умножить \[-\frac<1><4>\]
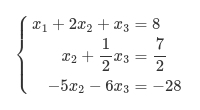
Для того чтобы избавится от \[x_<2>\] в третьим уравнении, мы множим вторую строку на 5 и слаживаем её с третьей.
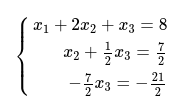
Теперь с третьей строки находим \[x_<3>\].
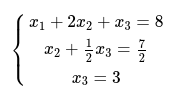
Мы закончили прямой ход метода Гаусса. Теперь приступаем к обратному ходу. Подставляем значение х3 во вторую строку и вычисляем \[x_<2>\]
Подставляем значение \[x_ <2>и x_<3>\] в первое уравнение и вычисляем \[x_<1>\].
Рассмотрим решение систем уравнений методом Гаусса.
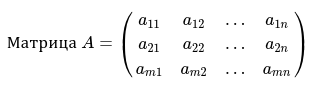
Матрица системы уравнений – это та матрица, которая создаётся только с коэффициентов при переменных неизвестных.
Матрицей данной системы линейных алгебраических уравнений есть:
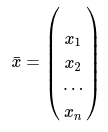
Вектор неизвестных – это вектор \[\bar
Вектор \[\bar=\left(b_<1>, b_<2>, \ldots, b_
Расширенная матрица – та, в которой ещё записаны и свободные члены.
Если хотя бы одно из чисел \[b_<1>, b_<2>, \ldots, b_
Решение системы уравнений – это набор чисел \[x_<1>, x_ <2>\ldots, x_
Эквивалентными системами называются, когда каждое решение одной системы является решением другой, и на оборот.
Элементарные преобразования матрицы:
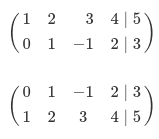
Если в матрице две строки становятся идентичными, оставляем одну, а другую убираем. Рассмотрим, например, матрицу
В данной матрице второй и третий ряд одинаковые, а четвёртый (если разделить на 2) такой же, как и они. Значить нам достаточно оставить только одну строку. И теперь наша матрица будет выглядеть так:
Если в ходе работы с матрицей один из рядом имеет сплошные нули, его тоже нужно удалить.
В матрице строки и столбцы можно менять местами.
Матричную строку можно делить, умножать на любое число, не равное нулю.
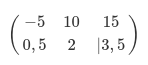
В этом примере целесообразно первую строку разделить на 5, а вторую умножить на 2. И теперь матрица будет выглядеть так:
Данные преобразования не меняют совокупности решений системы линейных алгебраических уравнений, то есть новые системы эквивалентные прежней.
А теперь рассмотрим тот же пример системы линейных алгебраических уравнений, что рассматривали ранее, только теперь с помощью матрицы.
Система линейных алгебраических уравнений
В данной публикации мы рассмотрим определение системы линейных алгебраических уравнений (СЛАУ), как она выглядит, какие виды бывают, а также как ее представить в матричной форме, в том числе расширенной.
Определение системы линейных уравнений
Система линейных алгебраических уравнений (или сокращенно “СЛАУ”) – это система, которая в общем виде выглядит так:

Индексы коэффициентов ( aij ) формируются следующим образом:
- i – номер линейного уравнения;
- j – номер переменной, к которой относится коэффициент.
Решение СЛАУ – такие числа c1, c2,…, cn , при постановке которых вместо x1, x2,…, xn , все уравнения системы превратятся в тождества.
Виды СЛАУ
- Однородная – все свободные члены системы равны нулю ( b1 = b2 = … = bm = 0 ).


В зависимости от количества решений, СЛАУ может быть:
- Совместная – имеет хотя бы одно решение. При этом если оно единственное, система называется определенной, если решений несколько – неопределенной.
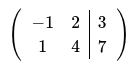
СЛАУ выше является совместной, т.к. есть хотя бы одно решение: , y = 3 . - Несовместная – система не имеет решений.
Правые части уравнений одинаковые, а левые – нет. Таким образом, решений нет.


Матричная форма записи системы
СЛАУ можно представить в матричной форме:
- A – матрица, которая образована коэффициентами при неизвестных:
- X – столбец переменных:
- B – столбец свободных членов:


Пример
Представим систему уравнений ниже в матричном виде:

Пользуясь формами выше, составляем основную матрицу с коэффициентами, столбцы с неизвестными и свободными членами.



Полная запись заданной системы уравнений в матричном виде:

Расширенная матрица СЛАУ
Если к матрице системы A добавить справа столбец свободных членов B , разделив данные вертикальной чертой, то получится расширенная матрица СЛАУ.
Для примера выше получается так:

 – обозначение расширенной матрицы.
– обозначение расширенной матрицы.
Системы линейных уравнений: основные понятия
— это объединение из n линейных уравнений, каждое из которых содержит k переменных. Записывается это так:
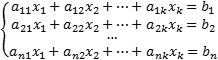
Многие, впервые сталкиваясь с высшей алгеброй, ошибочно полагают, что число уравнений обязательно должно совпадать с числом переменных. В школьной алгебре так обычно и бывает, однако для высшей алгебры это, вообще говоря, неверно.
— это последовательность чисел ( k 1, k 2, . kn ), которая является решением каждого уравнения системы, т.е. при подстановке в это уравнение вместо переменных x 1, x 2, . xn дает верное числовое равенство.
Соответственно, решить систему уравнений — значит найти множество всех ее решений или доказать, что это множество пусто. Поскольку число уравнений и число неизвестных может не совпадать, возможны три случая:
- Система несовместна, т.е. множество всех решений пусто. Достаточно редкий случай, который легко обнаруживается независимо от того, каким методом решать систему.
- Система совместна и определена, т.е. имеет ровно одно решение. Классический вариант, хорошо известный еще со школьной скамьи.
- Система совместна и не определена, т.е. имеет бесконечно много решений. Это самый жесткий вариант. Недостаточно указать, что «система имеет бесконечное множество решений» — надо описать, как устроено это множество.
Переменная xi называется , если она входит только в одно уравнение системы, причем с коэффициентом 1. Другими словами, в остальных уравнениях коэффициент при переменной xi должен быть равен нулю.
Если в каждом уравнении выбрать по одной разрешенной переменной, получим набор разрешенных переменных для всей системы уравнений. Сама система, записанная в таком виде, тоже будет называться разрешенной. Вообще говоря, одну и ту же исходную систему можно свести к разным разрешенным, однако сейчас нас это не волнует. Вот примеры разрешенных систем:

Обе системы являются разрешенными относительно переменных x 1, x 3 и x 4. Впрочем, с тем же успехом можно утверждать, что вторая система — разрешенная относительно x 1, x 3 и x 5. Достаточно переписать самое последнее уравнение в виде x 5 = x 4.
Теперь рассмотрим более общий случай. Пусть всего у нас k переменных, из которых r являются разрешенными. Тогда возможны два случая:
- Число разрешенных переменных r равно общему числу переменных k : r = k . Получаем систему из k уравнений, в которых r = k разрешенных переменных. Такая система является совместной и определенной, т.к. x 1 = b 1, x 2 = b 2, . xk = bk ;
- Число разрешенных переменных r меньше общего числа переменных k : r k . Остальные ( k − r ) переменных называются свободными — они могут принимать любые значения, из которых легко вычисляются разрешенные переменные.
Так, в приведенных выше системах переменные x 2, x 5, x 6 (для первой системы) и x 2, x 5 (для второй) являются свободными. Случай, когда есть свободные переменные, лучше сформулировать в виде теоремы:
Обратите внимание: это очень важный момент! В зависимости от того, как вы запишете итоговую систему, одна и та же переменная может быть как разрешенной, так и свободной. Большинство репетиторов по высшей математике рекомендуют выписывать переменные в лексикографическом порядке, т.е. по возрастанию индекса. Однако вы совершенно не обязаны следовать этому совету.
Теорема. Если в системе из n уравнений переменные x 1, x 2, . xr — разрешенные, а x r + 1, x r + 2, . x k — свободные, то:
- Если задать значения свободным переменным ( x r + 1 = t r + 1, x r + 2 = t r + 2, . xk = tk ), а затем найти значения x 1, x 2, . xr , получим одно из решений.
- Если в двух решениях значения свободных переменных совпадают, то значения разрешенных переменных тоже совпадают, т.е. решения равны.
В чем смысл этой теоремы? Чтобы получить все решения разрешенной системы уравнений, достаточно выделить свободные переменные. Затем, присваивая свободным переменным разные значения, будем получать готовые решения. Вот и все — таким образом можно получить все решения системы. Других решений не существует.
Вывод: разрешенная система уравнений всегда совместна. Если число уравнений в разрешенной системе равно числу переменных, система будет определенной, если меньше — неопределенной.
И все бы хорошо, но возникает вопрос: как из исходной системы уравнений получить разрешенную? Для этого существует метод Гаусса.
http://microexcel.ru/slau/
http://www.berdov.com/works/algebra/system_of_linear_equations/