Система уравнений определитель второго порядка
Определителем или детерминантом, составленным из чисел этой таблицы, называется число $ad — bc$, обозначаемое так:
$\begin
Видно, что определитель равен разности произведений пар элементов, стоящих на его главной и побочной диагоналях.
С помощью определителей можно равенства (6), (7) и (8) из параграфа «Линейные системы» переписать, поменяв местами их части, так:
Заметим, что определители $\Delta, \Delta_
Проведем теперь исследование системы линейных уравнений $\begin
1) Пусть $\Delta \neq 0$. Тогда, как уже отмечалось, формулы $\begin
2) Пусть теперь $\Delta = 0$. В зависим от значений $\Delta_
а) Хотя бы один из определителей $\Delta_<х>, \Delta_
б) Оба определителя $\Delta_
$\Delta = a_<1>b_ <2>— a_<2>b_ <1>= 0, \Delta_
и из записи второго уравнения системы, подставляя в него выражения коэффициентов $b_<2>, c_<2>$,
найдем, что оно отличается от первого уравнения лишь множителем $\frac
. Возможен, в принципе, и такой крайний случай, как равенство нулю всех коэффициентов при неизвестных (он может встретиться при исследовании систем с буквенными коэффициентами). У такой системы
$0 \cdot x + 0 \cdot y = c_<1>$,
$0 \cdot x + 0 \cdot y = c_<2>$
все определители равны нулю: $\Delta = \Delta_
Подведем итоги исследования системы линейных уравнений. Имеется три вида таких систем:
1) Если $\Delta \neq 0$, то система определенная, имеет единственное решение $\begin
2) Если $\Delta = 0$, но $\Delta_
3) Если $\Delta = \Delta_
Равенство нулю определителя,
$\begin
означает пропорциональность элементов, стоящих в его строках (и обратно):
В силу этого признаки, отличающие линейные системы разных типов (определенные, неопределенные, несовместные), могут быть сформулированы в терминах пропорций между коэффициентами системы (без привлечения определителей).
Условие $\Delta = 0$ ($\Delta = 0$) заменяется поэтому требованием пропорциональности (непропорциональности) коэффициентов при неизвестных:
В случае $\Delta = \Delta_
(эти пропорции получаются, например, из $b_ <2>= a_ <2>\frac
1) Если коэффициенты при неизвестных не пропорциональны:
то система определенная.
2) Если коэффициенты при неизвестных пропорциональны, а свободные члены им не пропорциональны:
то система несовместная.
3) Если пропорциональны коэффициенты при неизвестных и свободные члены:
то система неопределенная.
Проведенное исследование систем линейных уравнений с двумя неизвестными допускает простое геометрическое истолкование. Всякое линейное уравнение определяет на координатной плоскости прямую линию. Уравнения системы $\begin

3) данные прямые совпадают (рис. в); этот случай соответствует неопределенной системе: каждая точка «дважды заданной» прямой будет решением системы.
Определители второго и третьего порядков и их свойства с примерами решения
Содержание:
Определители второго порядка:
Под определителем (детерминантом) второго порядка понимается выражение

Числа 
Формула (1) дает правило «развертывания» определителя второго порядка, а именно: определитель второго порядка равен разности произведений его элементов первой и второй диагоналей.
Определители второго порядка
С помощью определителей второго порядка удобно решать линейные системы двух уравнений с двумя неизвестными:

Такую линейную систему, в которой свободные члены находятся в правых частях, для определенности мы будем называть стандартной.
Под решением системы (2) понимается всякая пара чисел (х, у), обращающая эту систему в тождество. Если существует только одна такая пара, то решение называется единственным. Аналогично вводится понятие решения для системы, содержащей п неизвестных  .
.
Для нахождения решений системы (2) применим метод исключения. Умножая первое уравнение системы (2) на  , а второе — на —
, а второе — на —  и складывая, будем иметь
и складывая, будем иметь

Аналогично, умножая первое уравнение системы (2) на а2 второе — на  складывая, получаем
складывая, получаем

Введем определитель системы
а также дополнительные определители
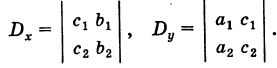
Заметим, что дополнительные определители Dx и Dy получаются из определителя системы D путем замены коэффициентов при указанном неизвестном на соответствующие свободные члены.
Уравнения (3) и (4) принимают вид

Если  , то отсюда получаем, что система (2) имеет единственное решение
, то отсюда получаем, что система (2) имеет единственное решение

Замечание. Если определитель D = 0, то система (2) или не имеет решений (т. е. несовместна), или имеет бесконечно много решений (т. е. система неопределенная).
Пример:

Решение:
Имеем 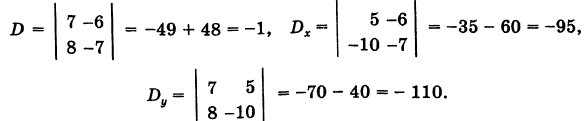
Отсюда на основании формул Крамера (6) получаем
 Геометрически решение (95; 110) представляет собой точку пересечения прямых (7).
Геометрически решение (95; 110) представляет собой точку пересечения прямых (7).
Система двух однородных уравнений с тремя неизвестными
Рассмотрим однородную систему

Эта система всегда совместна, так как, очевидно, имеет нулевое решение х = 0, у = 0, z = 0. Однако интересно найти не н у л е в ы е решения (х, у, z) системы (1). Пусть, например,  .
.
Тогда систему (1) можно переписать в виде
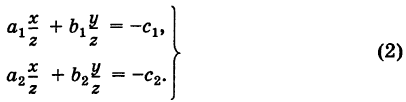 Отсюда, предполагая, что
Отсюда, предполагая, что  , получаем
, получаем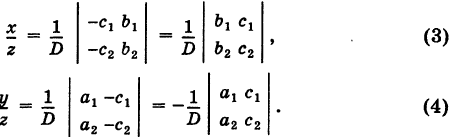
Введем в рассмотрение матрицу коэффициентов системы (1)
Определители второго порядка  , которые получаются из матрицы (5) путем вычеркивания соответствующего столбца, называются ее минорами. Таким образом, имеем
, которые получаются из матрицы (5) путем вычеркивания соответствующего столбца, называются ее минорами. Таким образом, имеем 
Используя эти обозначения, уравнения (3) и (4) можно переписать в следующем виде:

Равенства (6), очевидно, справедливы также и для нулевого решения.
Таким образом, имеем следующее правило: неизвестные однородной системы (1) пропорциональны соответствующим минорам ее матрицы коэффициентов, взятым с надлежащими знаками.
Обозначая через t коэффициент пропорциональности для отношений (6), получим полную систему решений системы (1):

При выводе формул (7) мы предполагали, что  . Однако, как легко убедиться, формулы (7) будут справедливы, если любой (хотя бы один) из миноров
. Однако, как легко убедиться, формулы (7) будут справедливы, если любой (хотя бы один) из миноров  отличен от нуля.
отличен от нуля.
Замечание. Если все миноры  равны нулю, то система (1) требует особого рассмотрения.
равны нулю, то система (1) требует особого рассмотрения.
Пример:

Решение:
Составляя матрицу коэффициентов
находим ее миноры: 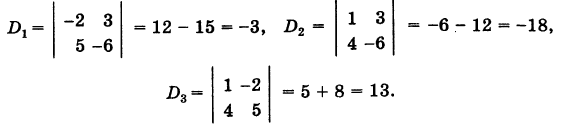 На основании формулы (7) полная система решений системы (8) имеет вид
На основании формулы (7) полная система решений системы (8) имеет вид

где 
Простейшее ненулевое решение системы (1), получающееся при t — 1, есть х = -3, у = 18, z = 13.
Определители третьего порядка

Числа  называются элементами определителя; они расположены в трех строках и трех столбцах его (ряды определителя). ,
называются элементами определителя; они расположены в трех строках и трех столбцах его (ряды определителя). ,
Раскрывая определители второго порядка (миноры) в формуле (1) и собирая члены с одинаковыми знаками, получаем, что определитель третьего порядка представляет собой знакопеременную сумму шести слагаемых:

из которых три берутся со знаком плюс, а три — со знаком минус.
Пример:

Решение:
Используя формулу (1), имеем  В дальнейшем мы укажем более удобные способы вычисления определителей третьего порядка.
В дальнейшем мы укажем более удобные способы вычисления определителей третьего порядка.
Определение: Под минором элемента определителя третьего порядка понимается определитель младшего (второго) порядка, получающийся из данного определителя в результате вычеркивания строки и столбца, содержащих данный элемент.
Например, для определителя (3) минором его элемента 2, стоящего во второй строке и в первом столбце, является определитель  В дальнейшем для краткости будем говорить, что элемент определителя третьего порядка занимает четное место, если сумма номеров его строки и его столбца есть число четное, и нечетное место, если эта сумма есть число нечетное.
В дальнейшем для краткости будем говорить, что элемент определителя третьего порядка занимает четное место, если сумма номеров его строки и его столбца есть число четное, и нечетное место, если эта сумма есть число нечетное.
Определение: Алгебраическим дополнением (минором со знаком) элемента определителя третьего порядка называется минор этого элемента, взятый со знаком плюс, если элемент занимает четное место у и со знаком минус, если его место нечетное.
Таким образом, если М есть минор элемента определителя, a i и j — соответственно номер строки и номер столбца, на пересечении которых находится данный элемент, то его алгебраическое дополнение есть
Например, для элемента с2 определителя (1), находящегося во второй строке и в третьем столбце, его алгебраическое дополнение есть
Соответствующие знаки, приписываемые при этом минорам элементов определителя, можно задать таблицей
В дальнейшем алгебраические дополнения элементов определителя с буквенными элементами условимся обозначать соответствующими прописными (большими) буквами.
Теорема Разложения: Определитель третьего порядка равен сумме парных произведений элементов какого-либо ряда его на их алгебраические дополнения (под рядом понимается строка или столбец).
Таким образом, для определителя (1) справедливы шесть разложений: 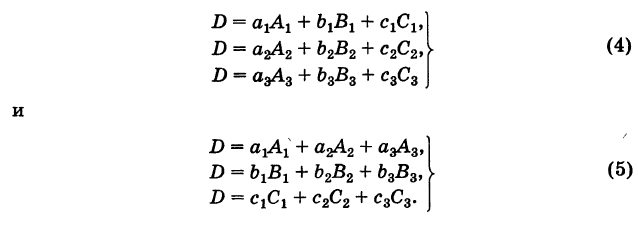
Легко проверить, что формулы (4) и (5) дают одно и то же выражение (2), принятое за определение.
Замечание. С помощью формул типа (4) или (5), по индукции, можно ввести определители высших порядков.
Основные свойства определителей
При формулировках мы не будем указывать порядок определителя, так как эти свойства справедливы для определителей любого порядка.
I. (Равноправность строк и столбцов.) Определитель не меняет своего значения при замене всех его строк соответствующими столбцами, т. е.
Действительно, разлагая первый определитель по элементам первой строки, а второй — по элементам первого столбца, в силу теоремы разложения мы получим один и тот же результат.
II. При перестановке двух параллельных рядов определителя его модуль сохраняет прежнее значение, а знак меняется на обратный.
Пусть, например, в определителе  переставлены первая и вторая строки; тогда получим определитель
переставлены первая и вторая строки; тогда получим определитель  Разлагая определитель D по элементам второй строки и учитывая, что при перестановке строк изменилась четность мест этих элементов, будем иметь
Разлагая определитель D по элементам второй строки и учитывая, что при перестановке строк изменилась четность мест этих элементов, будем иметь

Аналогичное положение получается и в других случаях.
Следствие 1. Определитель, у которого два параллельных ряда одинаковы, равен нулю.
В самом деле, пусть, например,
Переставляя первую и вторую строки определителя, в силу теоремы получим определитель -D. Но очевидно, эта операция не изменяет определитель D, поэтому -D = D и, следовательно, D = 0.
Следствие 2. Сумма парных произведений элементов какого-либо ряда определителя на алгебраические дополнения соответствующих элементов параллельного ряда равна нулю, т. е. для определителя (2) имеем  и т. д., а также
и т. д., а также  и т. д. (всего таких соотношений можно написать двенадцать).
и т. д. (всего таких соотношений можно написать двенадцать).
Левые части всех соотношений (3) и (4) представляют собой разложения соответствующих определителей третьего порядка, содержащих два одинаковых параллельных ряда и, следовательно, равны нулю. Например,  (здесь разложение нужно производить во второй строке!).
(здесь разложение нужно производить во второй строке!).
III. Общий множитель элементов какого-либо ряда определителя можно выносить за знак определителя, т. е.
Это свойство непосредственно вытекает из разложения определителя по элементам соответствующего ряда.
Следствие 1. Если все элементы какого-либо ряда определителя равны нулю, то определитель равен нулю.
Следствие 2. Если элементы какого-либо ряда определителя пропорциональны соответствующим элементам параллельного ряда его, то определитель равен нулю.
Например, имеем 
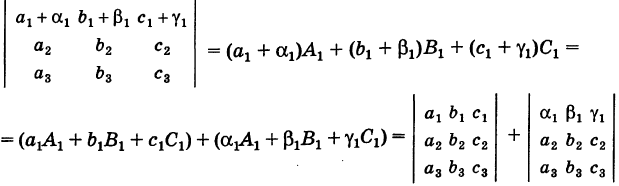
IV. Если элементы какого-либо ряда определителя представляют собой суммы двух слагаемых, то определитель может быть разложен на сумму двух соответствующих определителей.
Следствие. Величина определителя не изменится, если /с элементам какого-либо ряда его прибавить (или отнять) числа, пропорциональные соответствующим элементам параллельного ряда с одним и тем же коэффициентом пропорциональности (так называемые «элементарные преобразования определителя»).
Рассмотрим, например, определители
Используя свойства IV и III, будем иметь  Элементарные преобразования дают удобный способ вычисления определителей.
Элементарные преобразования дают удобный способ вычисления определителей.
Пример:
Вычислить симметричный определитель
Решение:
Вычитая из второй строки удвоенную первую строку, а из третьей строки утроенную первую строку, получим 
Система трех линейных уравнений
Рассмотрим стандартную линейную систему трех уравнений
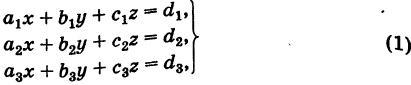
свободные члены которых находятся в правых частях. Под решением системы понимается всякая тройка чисел (х, у, г), удовлетворяющая этой системе. Введем определитель системы
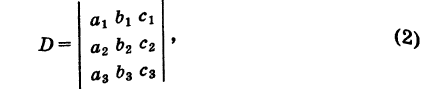 а также дополнительные определители
а также дополнительные определители
Последовательно умножая уравнения системы (1) на алгебраические дополнения  соответствующих элементов
соответствующих элементов 
 первого столбца определителя D, получим
первого столбца определителя D, получим

Отсюда, применяя теорему разложения и следствие 2 к свойству II, будем иметь  , т. е.
, т. е.  Используя алгебраические дополнения элементов второго и третьего столбцов определителя D, аналогично находим
Используя алгебраические дополнения элементов второго и третьего столбцов определителя D, аналогично находим

Если определитель системы  , то из уравнений (5) и
, то из уравнений (5) и  получаем единственное решение системы (1):
получаем единственное решение системы (1):  Таким образом, имеем правило Крамера: неизвестные стандартной линейной системы (1) с ненулевым определителем представляют собой дроби, знаменатель которых есть определитель системы, а числители равны соответствующим дополнительным определителям.
Таким образом, имеем правило Крамера: неизвестные стандартной линейной системы (1) с ненулевым определителем представляют собой дроби, знаменатель которых есть определитель системы, а числители равны соответствующим дополнительным определителям.
Замечание. Если определитель системы D = 0, то система (1) или несовместна, или имеет бесконечно много решений.
Пример:
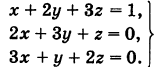
Решение:
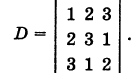
Вычитая из второго столбца удвоенный первый столбец, а из третьего столбца утроенный первый столбец, получим
Для дополнительных определителей находим следующие значения: 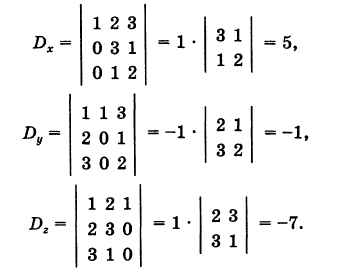 Используя правило Крамера, получаем решение системы:
Используя правило Крамера, получаем решение системы:

Однородная система трех линейных уравнений
Рассмотрим линейную систему

свободные члены которой равны нулю. Такая линейная система называется однородной.
Однородная линейная система (1), очевидно, допускает нулевое решение х = 0, у = 0, z = 0 и, следовательно, всегда совместна.
Интересно выяснить случаи, когда однородная система имеет ненулевые решения.
Теорема: Линейная однородная система трех линейных уравнений с тремя неизвестными имеет ненулевые решения тогда и только тогда, когда ее определитель равен нулю, т. е.
Доказательство: Пусть система (1) имеет ненулевое решение  Если определитель ее
Если определитель ее  то на основании формул Крамера система (1) обладает только нулевым решением, что противоречит предположению. Следовательно, D = 0.
то на основании формул Крамера система (1) обладает только нулевым решением, что противоречит предположению. Следовательно, D = 0.
Пусть D = 0. Тогда линейная система (1) либо несовместна, либо имеет бесконечно много решений. Но наша система совместна, так как имеется нулевое решение. Следовательно, система (1) допускает бесконечно много решений, в том числе и ненулевые.
Замечание. Укажем способ нахождения ненулевых решений однородной системы (1) в типичном случае.
Пусть определитель системы D = 0, но не все его миноры второго порядка равны нулю.
Мы будем предполагать, что

(этого всегда можно добиться с помощью перестановки уравнений и изменения нумерации неизвестных).
Рассмотрим подсистему, состоящую из двух первых уравнений системы (1):
В силу решения этой системы имеют вид

 где
где  — соответствующие алгебраические дополнения. Подставляя эти числа в неиспользованное третье уравнение системы (1) и учитывая, что определитель D = 0, получаем
— соответствующие алгебраические дополнения. Подставляя эти числа в неиспользованное третье уравнение системы (1) и учитывая, что определитель D = 0, получаем

Следовательно, формулы (5), где t произвольно, дают все решения полной системы (1).
Геометрически уравнения системы (1) представляют собой уравнения трех плоскостей в пространстве Oxyz. Если определитель  , то эти плоскости пересекаются в единственной точке 0(0, 0, 0); если же определитель D =0, но не все его миноры второго порядка равны нулю, то в нашем случае эти плоскости пересекаются по прямой линии (как «листы книги»). Без рассмотрения оставлен случай слияния трех плоскостей.
, то эти плоскости пересекаются в единственной точке 0(0, 0, 0); если же определитель D =0, но не все его миноры второго порядка равны нулю, то в нашем случае эти плоскости пересекаются по прямой линии (как «листы книги»). Без рассмотрения оставлен случай слияния трех плоскостей.
Система линейных уравнений с многими неизвестными. Метод Гаусса
Рассмотрим систему  линейных уравнений с
линейных уравнений с  неизвестными:
неизвестными:

Здесь для коэффициентов системы введена двойная индексация, а именно: у коэффициента  первый индекс i обозначает номер уравнения, а второй j — номер неизвестного. Для удобства выкладок свободные члены обозначены через
первый индекс i обозначает номер уравнения, а второй j — номер неизвестного. Для удобства выкладок свободные члены обозначены через 
Наиболее простой метод решения системы (1) — это метод исключения. Мы изложим его в форме схемы Гаусса (обычно называемой методом Гаусса).
Пусть для определенности  — ведущий коэффициент». Разделив все члены первого уравнения на аи, будем иметь приведенное уравнение
— ведущий коэффициент». Разделив все члены первого уравнения на аи, будем иметь приведенное уравнение


Рассмотрим i-e уравнение системы (1):

Для исключения xx из этого уравнения умножим приведенное уравнение (2) на ап и полученное уравнение вычтем из уравнения (4). Тогда будем иметь


Таким образом, получаем укороченную систему

коэффициенты которой определяются по формулам (6).
Если ее ведущий коэффициент  , то из системы (7) указанным выше приемом можно исключить неизвестное
, то из системы (7) указанным выше приемом можно исключить неизвестное  . причем новые коэффициенты будут вычисляться по формулам типа (6) и т.д. Эта часть вычислений называется прямым ходом метода Гаусса.
. причем новые коэффициенты будут вычисляться по формулам типа (6) и т.д. Эта часть вычислений называется прямым ходом метода Гаусса.
Для определения неизвестных 
 Рассмотрим приведенные уравнения
Рассмотрим приведенные уравнения

Отсюда последовательно находим неизвестные (обратный ход)  Заметим, что операции (9) выполняются без деления.
Заметим, что операции (9) выполняются без деления.
Если очередной ведущий коэффициент окажется равным нулю, то уравнения системы следует переставить надлежащим образом. Возможно, конечно, что система (1) несовместна. Тогда, естественно, метод Гаусса не допускает реализации.
Пример:
Методом Гаусса решить систему

Решение:
Составляем таблицу коэффициентов системы (10), рассматривая свободные члены ее как коэффициенты при  :
: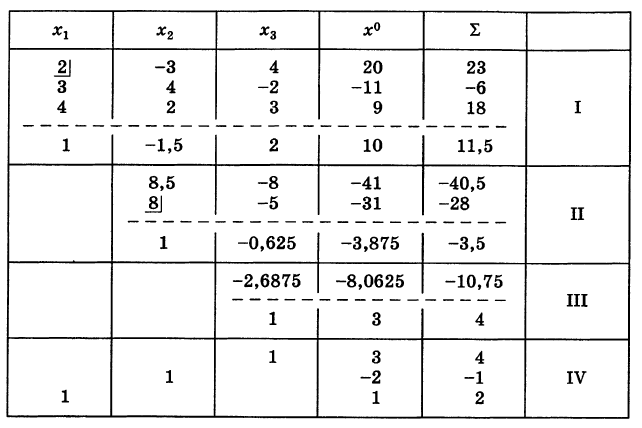
Последний столбец  содержит суммы элементов соответствующих строк таблицы; этот столбец служит для контроля вычислений.
содержит суммы элементов соответствующих строк таблицы; этот столбец служит для контроля вычислений.
Считая отмеченный коэффициент 2 ведущим и деля на этот коэффициент все элементы первой строки таблицы (включая и входящий в столбец  ), получаем коэффициенты первого приведенного уравнения (см. табл.). Текущий контроль вычислений осуществляется тем, что элемент из столбца
), получаем коэффициенты первого приведенного уравнения (см. табл.). Текущий контроль вычислений осуществляется тем, что элемент из столбца  равен сумме всех остальных элементов этой строки. Этим заканчивается заполнение раздела I таблицы.
равен сумме всех остальных элементов этой строки. Этим заканчивается заполнение раздела I таблицы.
Далее, используя формулу (6), подсчитываем коэффициенты укороченной системы, не содержащей неизвестного xv Для наглядности будем называть строку, содержащую коэффициенты приведенного уравнения, приведенной, а столбец, содержащий ведущий элемент раздела, — ведущим. Тогда на основании формулы (6) справедливо правило: преобразованные коэффициенты схемы Гаусса, равны ее прежним коэффициентам минус произведение «проекций» их на соответствующие приведенную строку и ведущий столбец таблицы. Пользуясь этим, заполняем раздел II таблицы, включая контрольный столбец. Для удобства вычислении в качестве ведущего коэффициента раздела П берем элемент 8 (см. табл.).
Аналогично производится заполнение раздела III таблицы. Этим заканчивается прямой ход схемы Гаусса.
Неизвестные  последовательно определяются из приведенных уравнений
последовательно определяются из приведенных уравнений
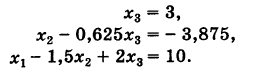
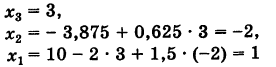
(обратный ход). Результаты обратного хода помещены в разделе IV таблицы.
Заметим, что если в качестве свободных членов взять элементы столбца  , то для неизвестных получатся значения
, то для неизвестных получатся значения 

 превышающие на единицу значения неизвестных
превышающие на единицу значения неизвестных  Этим обеспечивается заключительный контроль вычислений.
Этим обеспечивается заключительный контроль вычислений.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Метод Гаусса — определение и вычисление
- Прямая линия на плоскости и в пространстве
- Плоскость в трехмерном пространстве
- Функция одной переменной
- Ряды в математике
- Дифференциальные уравнения с примерами
- Обратная матрица — определение и нахождение
- Ранг матрицы — определение и вычисление
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Определители и их свойства. Определители второго порядка и их свойства. Определители третьего порядка и их свойства. Миноры и алгебраические дополнения
Определители второго порядка и их свойства
На практике часто исследователю приходится иметь дело с неизвестными величинами, связанными между собой некоторыми заранее определенными зависимостями, которые могут быть выражены любыми формулами. Если при этом выполняется ряд условий:
- коэффициенты в формулах постоянные,
- неизвестные входят в формулы только в первой степени,
- отсутствуют произведения между самими неизвестными,
то тогда такие зависимости называют линейными.
Пример. В лаборатории 10 образцов имеют общий вес 280 г. Найти средний вес одного образца, если тара весит 15 г.
Решение. Для ответа на вопрос воспользуемся простым уравнением:
обозначив за x средний вес одного образца. Решением составленного уравнения будет 26,5 г.
Пример. В лаборатории 10 образцов, поступивших от 1 отдела, и 10 образцов, поступивших от 2-го отдела, имеют общий вес 280 г, а 5 образцов из первого набора и 2 образца из второго набора имеют общий вес 128 г. Найти средний вес образцов в каждом наборе.
Решение. Для ответа на вопрос составим два уравнения, обозначив за x — средний вес образца породы 1, а за y — средний вес образца породы 2,
решая которые совместно, получаем x=24 г; y=4 г .
В обоих рассмотренных примерах мы имели дело с линейными зависимостями: в первом случае – с линейным уравнением, а во втором – с линейной системой уравнений.
Заменим коэффициенты буквами и получим линейную систему уравнений:
 | ( 1.1) |
где a11, a12, a21, a22, b1, b2 , — некоторые числа, x, y — неизвестные. Составим из коэффициентов системы (1.1) прямоугольную таблицу вида
 | ( 1.2) |
Определение 1. Матрицей будем называть любую прямоугольную таблицу, составленную из чисел aij
Определение 2. Элементы aij из которых составлена матрица, называют элементами данной матрицы
Определение 3. Определителем второго порядка или детерминантом, соответствующим матрице (1.2) назовем число D такое, что
 | ( 1.3) |
Определитель обозначается буквами D или  и записывается
и записывается

Следует обратить внимание, что хотя определитель есть число, по определению 3, но до тех пор пока не найдено его значение в виде единственного числа ( по формуле 1.2 или еще каким-либо допустимым способом), он записывается в виде таблицы. Тогда можно сказать, например, о перестановке строк или столбцов в этой таблице. В таком случае следует говорить » определитель , соответствующий матрице». Но на практике обычно вторая часть этой фразы для простоты опускается и тогда остается только одно слово – определитель . Для того, чтобы различить что имеется в виду – сам определитель в виде таблицы или его найденное значение , во втором случае используют слово детерминант. Поэтому, если говорят, например, «количество строк в определителе…», то имеют в виду определитель , соответствующий матрице, но еще не вычисленный до единственного числа. А, если говорят детерминант, то имеют в виду, что данный определитель представлен единственным числом, вычисленным либо по формуле, либо еще каким-нибудь допустимым способом.
Пример. Дана система уравнений
Решение. Из коэффициентов системы составим матрицу:  и соответствующий ей детерминант
и соответствующий ей детерминант 
Выполним вычисления по формуле (2), получим

Определение 4. Количество строк (или столбцов) в определителе называется порядком определителя
В примере был вычислен определитель второго порядка.
Определители обладают следующими свойствами.
Свойство 1. Определитель не изменится, если его строки заменить столбцами и наоборот.
Покажем это. Пусть дан определитель второго порядка
Определение 5. Операция замены строк столбцами (или наоборот) в определителе называется транспонированием.
Свойство 2. При перестановке двух строк или столбцов определитель меняет свой знак.
Поверку этого свойства проведем на примере, как и для свойства 1. Пусть дан определитель


Заметим, что все остальные приводимые здесь свойства доказываются аналогично на примерах, очень просто и поэтому далее все свойства приводятся без доказательств. Читатель может в качестве упражнений самостоятельно проверить каждое из этих свойств.
Свойство 3. Если все элементы какого-либо столбца (или строки) матрицы умножить (или разделить) на одно и то же число m , отличное от нуля, то определитель также умножится (разделится) на это число.

Свойство 4. Определитель , у которого элементы одной строки (столбца) пропорциональны другой строке (столбцу), равен нулю.
Свойство 5. Если каждый элемент какой-либо строки (столбца) можно представить как сумму двух слагаемых, то определитель будет равен сумме двух определителей. У первого из слагаемых определителей элементами соответствующей строки (столбца) будет первое слагаемое, а у другого — второе. Остальные элементы этих определителей будут такие же, как у исходного.

Сравнивая результат с исходным определителем убеждаемся в справедливости пятого свойства.
Это свойство широко используется для практических вычислений при работе с определителями порядка больше трех.
Свойство 6. Определитель не изменится, если к элементам какого-либо столбца(строки) прибавить соответствующие элементы другого столбца (строки), предварительно умноженные на какое-либо число.
Определитель — очень удобная математическая форма, которая позволяет быстро находить решение систем линейных уравнений. Большинство задач, связанных с вычислительной математикой, используют математический аппарат теории определителей.
http://www.evkova.org/opredeliteli-vtorogo-i-tretego-poryadkov-i-ih-svojstva
http://intuit.ru/studies/courses/1016/208/lecture/5363