Составление системы уравнений по законам Кирхгофа и представление её в дифференциальной и символической формах
КУРСОВАЯ РАБОТА
по дисциплине : « Электротехника и электроника »
тема: « Анализ электрической цепи синусоидального тока »
Содержание:
2. Расчётная часть
2.1 Составление системы уравнений по законам Кирхгофа и представление её в дифференциальной и символической формах
2.2 Расчёт токов в ветвях
2.3 Расчёт потенциалов точек цепи
2.4 Построение временных графиков мгновенных значений тока в одной из ветвей и напряжения между узлами электрической цепи
Задание
1) для заданной электрической схемы составить систему уравнений по законам Кирхгофа и записать её в двух формах:
а) в дифференциальной форме;
б) в символической форме;
2) рассчитать токи в ветвях, используя любой целесообразный для заданной схемы метод расчета;
3) рассчитать потенциалы точек схемы и построить векторную диаграмму;
4) записать уравнения для мгновенных значений тока в одной из ветвей и напряжения между узлами электрической цепи. Построить эти функции на одном временном графике.
е – источник переменной ЭДС

 141В
141В
 -90˚
-90˚


 84,6В
84,6В
 60˚
60˚
 80 Ом
80 Ом
 60 Ом
60 Ом
 40 мГн
40 мГн
 10 мкФ
10 мкФ

Введение
В настоящее время централизованное производство и распределение электрической энергии осуществляется на переменном токе. Переменный ток занял господствующее положение в промышленном приводе и электрическом освещении, в сельском хозяйстве и на транспорте, в технике связи и электротермии, а также в быту.
Переменными называют э.д.с., токи и напряжения изменяющиеся с течением времени. Они могут изменяться только по значению или только по направлению, а также по значению и направлению.
Цепи, в которых действует переменный ток — называют цепями переменного тока.
В электроэнергетике наибольшее применение получил переменный ток, изменяющийся во времени по синусоидальному закону.
Переменные электрические величины являются функциями времени, их значения в любой момент времени t называют мгновенными и обозначают строчными буквами. Например, выражение мгновенного значения синусоидального тока определяется тригонометрической функцией i=I  sin(
sin(  t+
t+ 
 ), единственной переменной в правой части, которой является время t. Амплитуда I равна максимальному значению тока. Аргумент синуса ( t+
), единственной переменной в правой части, которой является время t. Амплитуда I равна максимальному значению тока. Аргумент синуса ( t+  ), измеряемый в радианах, определяет фазный угол синусоидальной функции тока в любой момент времени t и называется фазой, а величина , равная фазному углу в момент начала отсчёта времени (t=0), — начальной фазой. Величина определяет число радианов, на которое изменяется фаза колебаний за секунду, и называется угловой частотой.
), измеряемый в радианах, определяет фазный угол синусоидальной функции тока в любой момент времени t и называется фазой, а величина , равная фазному углу в момент начала отсчёта времени (t=0), — начальной фазой. Величина определяет число радианов, на которое изменяется фаза колебаний за секунду, и называется угловой частотой.
Синусоидальные э.д.с., ток и напряжение являются периодическими функциями времени. Через промежуток времени Т, называемый периодом, фаза колебаний изменяется на угол 2  , и цикл колебаний повторяется снова: i(t)=i(t+T), следовательно, период и угловая частота связаны соотношением Т=2
, и цикл колебаний повторяется снова: i(t)=i(t+T), следовательно, период и угловая частота связаны соотношением Т=2  . Длительность периода принято измерять в секундах. Величену, обратную периоду, называют частотой и обозначают f. Частота определяется количеством периодов в секунду: f=1/T и измеряется в герцах (Гц). Очевидно, что = 2
. Длительность периода принято измерять в секундах. Величену, обратную периоду, называют частотой и обозначают f. Частота определяется количеством периодов в секунду: f=1/T и измеряется в герцах (Гц). Очевидно, что = 2  /T = 2 f.
/T = 2 f.
Всё сказанное относительно тока справедливо также для синусоидально изменяющихся напряжений u(t) и э.д.с. e(t).
При совместном рассмотрении нескольких синусоидальных электрических величин одной частоты обычно интересуются разностью их фазовых углов, называемой углом сдвига фаз. Угол сдвига фаз двух синусоидальных функций определяют как разность их начальных фаз. Если синусоиды имеют одинаковые начальные фазы, то говорят о совпадении по фазе, если разность фаз равна  , то говорят, что синусоиды противоположны по фазе. Фазовые соотношения имеют очень важное значение при анализе электрических цепей переменного тока. Угол сдвига фаз между током и напряжением участка цепи принято обозначать буквой
, то говорят, что синусоиды противоположны по фазе. Фазовые соотношения имеют очень важное значение при анализе электрических цепей переменного тока. Угол сдвига фаз между током и напряжением участка цепи принято обозначать буквой  и определять вычитанием начальные фазы тока из начальной фазы напряжения:
и определять вычитанием начальные фазы тока из начальной фазы напряжения:
 =
= 
 —
—
Угол — величина алгебраическая. Если > , то >0, при этом говорят, что напряжение опережает ток по фазе или ток отстаёт по фазе от напряжения. В случае
I =  .
.
Тепловое и электромеханическое действия тока пропорциональны квадрату его мгновенного значения, поэтому именно действующий ток I может служить количественной мерой их оценки за период.
Между амплитудой и действующим значением для синусоидальных величин установлена связь. Если i = I  sin
sin  t, то
t, то


 ,
,
следовательно в соответствии с определением I = I  /
/  .
.
Для действующих значений синусоидально изменяющихся напряжения, э.д.с. и магнитного потока справедливы аналогичные выражения
U = U / , E = E / , Ф = Ф / .
Если говорят о значениях переменного напряжения, э.д.с. или тока, то, как правило, подразумевают их действующие значения.
Диапазон напряжений и токов, используемых в электротехнике очень широк. Обычно приборы для измерения переменных токов и напряжений градуируют в действующих значениях.
Во многих случаях основные характеристики электротехнических устройств могут быть получены и описаны с помощью известных из курса физики интегральных понятий (скалярных величин): тока, электродвижущей силы (э.д.с.), напряжения. При таком описании совокупность электротехнических устройств рассматривают как электрическую цепь, состоящую из источников и приёмников электрической энергии, характеризуемых э.д.с. Е.током I, напряжением U. Источники и приёмники электрической энергии, являющиеся основными элементами электрической цепи, соединяют проводами для обеспечения замкнутого пути для электрического тока. Для включения и отключения электротехнических устройств применяют коммутационную аппаратуру (выключатели, рубильники, тумблеры). Кроме этих элементов в электрическую цепь могут включаться электрические приборы для измерения тока, напряжения, мощности.
Для анализа цепей переменного тока как правило пользуются схемами замещения составленными из идеальных элементов: резистивного R, емкостного C, индуктивного L, источника э.д.с. E, источника тока J.
К идеальным резистивным элементам могут быть отнесены реостаты, большинство электронагревательных устройств; резисторы.
К емкостным отнестяся конденсаторы.
Примером индуктивного идеального элемента электрической цепи является индуктивная катушка.
Идеальным источником может служить энергосистема и промышленная сеть переменного тока.
Применение законов Кирхгофа для описания состояния электрических цепей.
Основными законами, используемыми для анализа и расчёта электрических цепей, являются первый и второй законы Кирхгофа.
Первый закон Кирхгофа является следствием закона сохранения заряда, согласно которому в любом узле заряд одного знака не может ни накапливаться, ни убывать. Согласно первому закону Кирхгофа алгебраическая сумма токов ветвей, сходящихся в узле, равна нулю: 
При этом токи, направленные от узла, следует брать со знаком плюс, а токи, направленные к узлу,- со знаком минус.
Второй закон Кирхгофа является следствием закона сохранения энергии, в силу которого изменение потенциала в замкнутом контуре равно нулю. Изменение потенциала между двумя точками участка цепи характеризуется разностью потенциалов, которую можно измерить вольтметром. В электротехнике разность потенциалов между двумя любыми точками цепи принято называть напряжением. Поэтому согласно второму закону Кирхгофа алгебраическая сумма напряжений всех участков замкнутого контура равна нулю: 
При составлении уравнений по второму закону Кирхгофа слагаемые берут со знаком плюс в случае, когда направление обхода контура совпадает с направлением соответственно напряжения, тока или э.д.с., в противном случае берут со знаком минус.
Рекомендуется следующий порядок составления уравнений по законам Кирхгофа: определяют число ветвей, узлов и независимых контуров, устанавливают число независимых уравнений по первому закону Кирхгофа, остальные уравнения составляют по второму закону Кирхгофа.
Для определения неизвестных токов в ветвях необходимо составить уравнения по первому второму закону Кирхгофа, количество которых должно быть равно количеству неизвестны4х токов. По первому закону Кирхгофа можно составить y-1 независимых уравнений, где y- количество узлов цепи. Использовать все y уравнений невозможно, так как одно из них обязательно будет зависимым.
Количество уравнений, составляемых по второму закону Кирхгофа, должно быть равно количеству независимых контуров. Независимым называют контур, в который входит хотя бы одна новая ветвь.
Если в результате решения этих уравнений получатся отрицательные значения токов, то это означает, что истинные направления токов в ветвях цепи противоположны тем направлениям, для которых составлялись уравнения.
Метод контурных токов.
Сложную электрическую цепь, содержащую несколько активных и пассивных элементов и имеющую много узлов и контуров, рассчитать с помощью первого и второго законов Кирхгофа будет довольно трудно, так как будет связано с решением большого количества уравнений. Вводя понятие о контурных токах, можно свести уравнения, составленные по законам Кирхгофа, к системе уравнений, составленных лишь для независимых контуров, т. е. исключить уравнения, составляемые по первому закону Кирхгофа. Благодаря этому удаётся снизить порядок системы уравнений. Под контурными токами понимают условные (расчётные) токи, замыкающиеся в соответствующих контурах. На основе составленных уравнений выписывается матрица вида  Здесь
Здесь  квадратная матрица коэффициентов при неизвестных контурных токах;
квадратная матрица коэффициентов при неизвестных контурных токах;  матрица- столбец неизвестных контурных токов;
матрица- столбец неизвестных контурных токов;  матрица- столбец известных контурных э.д.с. Диагональные элементы матрицы
матрица- столбец известных контурных э.д.с. Диагональные элементы матрицы  , называемые контурными сопротивлениями или собственными сопротивлениями контуров, равны сумме сопротивлений всех элементов, входящих в контур. Остальные элементы матрицы
, называемые контурными сопротивлениями или собственными сопротивлениями контуров, равны сумме сопротивлений всех элементов, входящих в контур. Остальные элементы матрицы  равны сопротивлениям общих ветвей смежных контуров и имеют знак минус. Если какие-либо контуры не имеют общих ветвей, то соответствующие элементы матрицы равны нулю. Решением уравнения
равны сопротивлениям общих ветвей смежных контуров и имеют знак минус. Если какие-либо контуры не имеют общих ветвей, то соответствующие элементы матрицы равны нулю. Решением уравнения  будет
будет  , где
, где  — матрица, обратная матрице коэффициентов
— матрица, обратная матрице коэффициентов  .
.
Использование принципа суперпозиции для анализа электрических цепей.
Применяя принцип суперпозиции можно найти ток любой ветви или напряжение любого участка электрической цепи как алгебраическую сумму частичных токов или напряжений, вызываемых отдельным действием источников э.д.с. и тока. С помощью принципа суперпозиции (наложения) расчёт сложной цепи с несколькими источниками э.д.с. и тока можно свести к расчёту нескольких цепей с одним источником.
Для определения токов в цепи вначале полагают, что в ней действует только один источник э.д.с. (например  ). При этом сопротивления всех элементов считают неизменными. Определяют частичные токи от действия этого источника. Далее проводят расчёт частичных токов от действия другого источника э.д.с. и т. д. рассматривая каждый следующий источник в отдельности и находя частичные токи от их действия. Алгебраическое суммирование частичных токов с учётом их направлений даёт значения действительных токов ветвей.
). При этом сопротивления всех элементов считают неизменными. Определяют частичные токи от действия этого источника. Далее проводят расчёт частичных токов от действия другого источника э.д.с. и т. д. рассматривая каждый следующий источник в отдельности и находя частичные токи от их действия. Алгебраическое суммирование частичных токов с учётом их направлений даёт значения действительных токов ветвей.
Метод расчёта электрических цепей с использованием принципа суперпозиции является довольно громоздким и поэтому применяется редко. Он целесообразен тогда, когда электрическое состояние цепи определено для каких либо источников э.д.с. и токов и требуется проанализировать электрическое состояние цепи при изменении э.д.с. или тока одного из источников. В этом случае нет необходимости вновь рассчитывать значения токов и напряжений от действия всех источников, а достаточно определить лишь частичные токи и напряжения от действия дополнительной э.д.с.  или дополнительного тока
или дополнительного тока  источника, а также токи и напряжения от действия нового источника как алгебраическую сумму прежних и частичных токов и напряжений.
источника, а также токи и напряжения от действия нового источника как алгебраическую сумму прежних и частичных токов и напряжений.
Метод междуузлового напряжения.
В реальных электрических цепях очень часто несколько источников и приёмников электрической энергии включаются параллельно. Схема замещения такой цепи, содержащей активные и пассивные ветви, соединённые параллельно, имеет только два узла, например узлы А и В. Для определения токов во всех ветвях достаточно найти напряжение между двумя узлами. Формулу для этого напряжения можно получить, используя принцип суперпозиции.
Частичное напряжение от действия источника тока J можно определить исходя из того, что ток J равен сумме токов всех ветвей. Далее необходимо определить частичные напряжения от действия каждого источника э.д.с. в отдельности. Таким образом, если схема содержит k источников тока и m источников э.д.с., то напряжение между узлами равно алгебраической сумме всех частичных напряжений, т.е.

Произведения  и
и  берут со знаком плюс, когда направление Е и J противоположны выбранному условно-положительному направлению междуузлового напряжения и со знаком минус, когда эти направления совпадают.
берут со знаком плюс, когда направление Е и J противоположны выбранному условно-положительному направлению междуузлового напряжения и со знаком минус, когда эти направления совпадают.
Зная междуузловое напряжение, легко найти токи как в пассивных, так и в активных ветвях.
Расчетная часть
Составление системы уравнений по законам Кирхгофа и представление её в дифференциальной и символической формах
Система уравнений в дифференциальной форме:

Система уравнений в символической форме:

Расчёт токов в ветвях

Для расчёта токов в ветвях воспользуемся методом междуузлового напряжения.
Формы записи дифференциальных уравнений
Стационарные линейные непрерывные САУ наиболее часто описываются линейными дифференциальными уравнениями с постоянными коэффициентами:

 . (2.9)
. (2.9)
В этом уравнении  — выходная переменная (управляемая (регулируемая) величина) САУ,
— выходная переменная (управляемая (регулируемая) величина) САУ,  — входная переменная САУ. Правая часть уравнения (3.1) записана относительно управляющего воздействия
— входная переменная САУ. Правая часть уравнения (3.1) записана относительно управляющего воздействия  , однако используются формы записи уравнения относительно задающего воздействия
, однако используются формы записи уравнения относительно задающего воздействия  , возмущения
, возмущения  или нескольких входных воздействий.
или нескольких входных воздействий.
Применяется также операторная форма записи уравнения (2.9):

 . (2.10)
. (2.10)
В этом уравнении через «  » обозначен оператор дифференцирования
» обозначен оператор дифференцирования  .
.
Заметим, что по сложившейся традиции символ « » используется также в преобразованиях Лапласа и Карсона-Хевисайда, но является комплексным числом  .
.
За многолетнюю историю развития ТАУ сложились традиции формальной записи линейных дифференциальных уравнений, описывающих стационарные САУ. В учебной литературе по ТАУ они рассматриваются как стандартные формы записи дифференциальных уравнений. Рассмотрим эти формы записи на примере линейной системы второго порядка:

 (2.11)
(2.11)
или в операторной форме

 . (2.12)
. (2.12)
Первая стандартная символическая форма записи уравнения (2.11) имеет следующий вид:
 , (2.13)
, (2.13)
где  ;
;  ;
;  ;
;  .
.
Форма (2.13) представляет собой операторно-структурное описание системы, т.е. в виде операторов звеньев, составляющих структурную схему системы (далее эти понятия разъясняются), и связей между ними. В этой форме  — постоянные времени звена, измеряемые в секундах;
— постоянные времени звена, измеряемые в секундах;  — передаточный коэффициент звена.
— передаточный коэффициент звена.
Из изложенного выше следует, что уравнение (2.9) в этой форме перепишется в следующем виде:

 , (2.14)
, (2.14)
где  ;
;  ;
;  .
.
Во второй стандартной форме записи дифференциального уравнения используется передаточная функция системы, которая для рассматриваемого примера (2.11) имеет вид
 .
.
Передаточная функция САУ, поведение которой во времени описывается уравнением (2.9), имеет следующий вид :


 .
.
В формуле (2.15) через  и
и  обозначены изображения (по Лапласу) выходной и входной переменных САУ при нулевых начальных условиях и равенстве нулю внешних возмущений, а через
обозначены изображения (по Лапласу) выходной и входной переменных САУ при нулевых начальных условиях и равенстве нулю внешних возмущений, а через  и
и  — полиномы относительно комплексной переменной
— полиномы относительно комплексной переменной  .
.
Вторая стандартная форма записи дифференциального уравнения имеет следующий вид:
 или
или  . (2.16)
. (2.16)
В (2.16)  и являются полиномами (символическими) относительно оператора .
и являются полиномами (символическими) относительно оператора .
Из сравнения первой и второй стандартных форм записи дифференциальных уравнений следует, что с математической точки зрения различие между этими формами весьма несущественно и состоит лишь в различном представлении коэффициентов уравнений. В ТАУ принято называть уравнения вида (2.9) — (2.14), (2.16) уравнениями типа «вход-выход».
Третья стандартная форма записи дифференциального уравнения принципиально отличается от форм записи, описанных выше. В этой форме записи используются переменные состояния. Отметим, что понятие «состояние» является базовым в современной ТАУ (СТАУ). Переменные состояния — это промежуточные переменные системы (рис.2.2), число которых равно ее порядку  . В общем случае входные
. В общем случае входные  и выходные
и выходные  переменные могут быть векторными величинами размерности
переменные могут быть векторными величинами размерности  и
и  соответственно.
соответственно.
Рис.2.2 — Состояние системы | Переменные состояния называют также координатами состояния, так как их совокупность задает вектор состояния  . . |
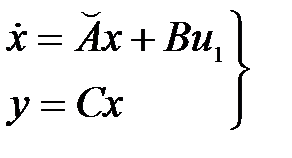
Множество возможных положений этого вектора образует векторное пространство  , называемое пространством состояний системы. В переменных состояния САУ описывается векторно-матричным уравнением
, называемое пространством состояний системы. В переменных состояния САУ описывается векторно-матричным уравнением
 , (2.17)
, (2.17)
где  — квадратная матрица коэффициентов (ее называют также собственной параметрической матрицей системы);
— квадратная матрица коэффициентов (ее называют также собственной параметрической матрицей системы);  — входная матрица (матрица управления) системы;
— входная матрица (матрица управления) системы;  — выходная матрица системы;
— выходная матрица системы;
 — вектор переменных состояния — внутренних координат системы;
— вектор переменных состояния — внутренних координат системы;
 — вектор входных переменных (управляющих и возмущающих);
— вектор входных переменных (управляющих и возмущающих);
 — вектор наблюдаемых или выходных переменных; размерности матриц
— вектор наблюдаемых или выходных переменных; размерности матриц  ,
,  ,
,  , соответственно, (
, соответственно, (  ), (
), (  ), (
), (  ).
).
Процессы в САУ в свободном движении (без внешних воздействий) согласно уравнению (2.17) описываются векторно-матричным уравнением  с характеристическим уравнением
с характеристическим уравнением  , где
, где  — единичная матрица, или в развернутом виде системой дифференциальных уравнений
— единичная матрица, или в развернутом виде системой дифференциальных уравнений

с характеристическим уравнением
 . (2.18)
. (2.18)
Эти уравнения при определенных начальных условиях дают возможность изучить процессы в системе путем их решения численными методами с использованием ЭВМ.
Разработаны различные способы перехода от уравнений типа «вход-выход» к уравнениям состояния вида (2.17) и наоборот. Один из наиболее распространенных способов состоит в следующем. Пусть САУ описывается уравнением (2.9). Введем обозначения
 ,
,  , . ,
, . ,  ,
,
 .
.
С помощью этих обозначений преобразуем уравнение (3.1) к следующему виду:
 , (2.19)
, (2.19)
где  ;
;  ;
;
 ;
;  .
.
В нашем примере и  являются скалярными величинами. В общем случае (2.17) — это, соответственно, вектор наблюдаемых или выходных переменных и вектор входных переменных (управляющих и возмущающих), поэтому в (2.19) матрицы
являются скалярными величинами. В общем случае (2.17) — это, соответственно, вектор наблюдаемых или выходных переменных и вектор входных переменных (управляющих и возмущающих), поэтому в (2.19) матрицы  и
и  выродились в вектор-столбец и вектор-строку соответственно.
выродились в вектор-столбец и вектор-строку соответственно.
Система уравнений (2.19) представляет собой описание линейной непрерывной системы в пространстве состояний  . Уравнения (2.19) с матрицей
. Уравнения (2.19) с матрицей  называют уравнениями в форме Фробениуса.
называют уравнениями в форме Фробениуса.
Если  , то
, то
 ;
;  .
.
Форма уравнений (2.19) с подобными матрицами и  называется в ТАУ канонической формой фазовой переменной.
называется в ТАУ канонической формой фазовой переменной.
Задание 1
1.1. По дифференциальному уравнению системы:

Для каждого типового звена 1 – 12 (таблицы 2.1) в соответствии с его параметрами вывести дифференциальное уравнение, операторное уравнение, и выражение передаточной функции.
1.2Математическое описание типового звена системы автоматического регулирования записать в трех формах записи дифференциальных уравнений.
Первая стандартная символическая форма операторно-структурное описание системы, т.е. в виде операторов звеньев.
Во второй стандартной форме записи дифференциального уравнения используется передаточная функция системы.
Третья стандартная форма записи дифференциального уравнения — переменные состояния.
Таблица 2.1 – Исходные коэффициенты
| № п.п. | Наименование звена | а 0 | а 1 | а 2 | b0 | b1 | Примечания |
| Безынерционное (пропорциональное) | к | ||||||
| Инерционное 1-го порядка (апериодическое) | Т | k | |||||
| Инерционное 2-го по- рядка (апериодическое) | Т2 2 | Т1 | k | Т1³2Т2 | |||
| Инерционное 2-го по- рядка (колебательное) | Т2 2 | Т1 | k | Т1 T |
Задание 2
2.1Для каждого звена (таблицы 2.2) по его передаточной функции записать дифференциальное уравнение.
2.2 Математическое описание типового звена системы автоматического регулирования записать в трех формах записи дифференциальных уравнений.
| Вар | Передаточная функция | Значения параметров передаточной функции |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; а4=0,5;в0=1;в1=3; в2=0,8;в3=0,3 | |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; в0=1;в1=3; в2=0,8 | |
 | а0=1; а1=5; а2 =1,2; в0=1; в1=3; | |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; а4=0,5; в0=10 | |
 | а0=1; а1=5; а2 =1,2; а3 =0,9; в0=10 | |
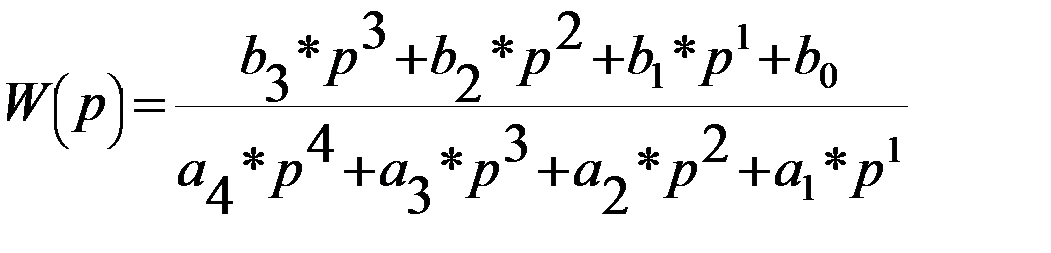 | а0=1; а1=5; а2 =1,2; а3=0,9;а4=0,5;в0=1;в1=3; в2=0,8;в3=0,3 | |
 | Т0=2; Т1=4; Т2=1,1;Т3=0,9 | |
 | Т0=2; Т1=4; Т2=1,1;Т3=1,1;Т4=,9 | |
 | К= 10;Т1=4; Т2=1,1;Т3=0,9 | |
 | К= 10; Т2=1,1;Т3=0,9 Т4=0,9 | |
 | Т0=0,7; Т1=3;Т2=1,2;Т3=0,9;Т4=0,8;Т5=0,5 | |
 | К=10 Т0=0,7; Т1=3;Т2=1,2;Т3=0,9;Т4=0,8;Т5=0,5; |
Задание №3
3.1 Для заданной схемы необходимо составить операторное уравнение для каждого элемента схемы САУ.
3.2. Определить входные и выходные величины каждого элемента, и определить передаточные функции отдельных элементов функциональной схемы.
Формы записи дифференциальных уравнений.
3.3Сформировать математическое описание систем автоматического регулирования в виде структурной схемы в буквенном и числовом обозначениях.
3.4 Сформировать математическое описание систем автоматического регулирования в виде третьей стандартной формы записи дифференциального уравнения — В переменных состояния САУ описываемых векторно-матричным уравнением.
Схема, показанная на рисунке 2.2, представляет собой САР температуры в помещении. Объектом регулирования (ОР) в данной системе является помещение, для которого регулируемая величина — температура внутри помещения Ө, регулирующее (управляющее) воздействие — температура воздуха ӨК, поступающего из калорифера, возмущающее воздействие — изменения внешних факторов f(в общем случае изменение температуры атмосферного воздуха, его влажности, скорости ветра). При исследовании системы в качестве основного возмущения следует рассматривать изменение температуры окружающего воздуха.
Воспринимающим органом — ВО (датчиком, чувствительным элементом) в данной САР является терморезистор RД, включенный в мостовую схему, обеспечивающую с помощью резистора RОзадание необходимого значения температуры в помещении и выполняющую также функции сравнивающего органа — СО (элемента сравнения). Усиление сигнала разбалансаΔU(сигнала рассогласования) измерительной мостовой схемы обеспечивается посредством усилителя. Усиленный сигнал Uобеспечивает вращение двухфазного исполнительного двигателя, который изменяет перемещение клапана (заслонки) на трубопроводе подачи парав калорифер, чем достигается изменение температуры воздуха на входе калорифера — регулирующего воздействия на объектерегулирования.
 |
1 — помещение; 2 — теплообменник (калорифер), 3 — измерительная мостовая схема; 4 — двухфазный исполнительный двигатель, 5 — дифференциальный магнитный усилитель; 6 — клапан (заслонка)
Рис. 2.2. Схема САР температуры
Динамические свойства объекта регулирования и элементов системы описываются следующими уравнениями:

где То, Т2, Т3, Т4 — постоянные времени, с; Ө — значение температуры воздуха в помещении, °С, Ө к — значение температуры воздуха на выходе калорифера, °С; к, к1, к2, к3, к4— коэффициенты передачи; f— возмущающее воздействие на объекте регулирования; Uд —падение напряжения на термодатчике, В; ΔU— напряжение на выходе мостовой схемы (сигнал рассогласования), В; μ. — линейное перемещение клапана, см; U0 — задающий сигнал, В.
Значения параметров элементов САР по вариантам даны в таблице 2.3.
Заданное значение температуры в помещении Ө = 20 °С.
Значения параметров элементов САР
| Вариант | Т0, с | Т2, с | к | к1, В/ 0 С | к4 | к2, см/(В*с) | f,. 0 С | К3, °С/см |
| 0,06 | 0,2 | 0,2 | 0,002 | -11 | ||||
| 0,07 | 0,25 | 0,3 | 0,001 | |||||
| 0,08 | 0,3 | 0,25 | 0,0018 | -8 | ||||
| 0,09 | 0,35 | 0,2 | 0,002 | |||||
| 0,10 | 0,4 | 0,2 | 0,002 | -5 | ||||
| 0,50 | 0,18 | 0,25 | 0,003 | |||||
| 0,055 | 0,19 | 0,4 | 0,0035 | |||||
| 0,06 | 0,17 | 0,4 | 0,0025 | -15 | ||||
| 0,06 | 0,25 | 0,2 | 0,0016 | |||||
| 0,08 | 0,4 | 0,15 | 0,0014 | -18 |
Примечание. Для всех вариантов постоянные времени Т3 = 20 с, Т4=0,5 с.
Схема САР, приведенная на рисунке 2.3, обеспечивает стабилизацию угловой скорости электродвигателя постоянного тока который совместно с рабочим механизмом является объектом регулирования. Регулируемая величина объекта — угловая скорость двигателя ω, регулирующее воздействие — напряжение Uг,подаваемое от генератора на якорь двигателя. Возмущающее воздействие на объекте регулирования — момент сопротивления Мс, создаваемый рабочим механизмом. Угловая скорость двигателя ωконтролируется тахогенератором, сигнал которого Uтг, пропорциональный скорости, сравнивается с задающим сигналом U3. Сигнал рассогласования ΔU = U3— UTг усиливается магнитным усилителем и воздействует на обмотку возбуждения генератора, выполняющего функции исполнительного органа (элемента).
Динамические свойства объекта регулирования и элементов САР описываются следующими уравнениями:

гдеТд, Ту, Tv — постоянные времени, с; Кд, Км, Ктг, Ку, Кг — коэффициенты передачи соответствующих элементов систем

1 — задающий потенциометр; 2 — магнитный усилитель; 3 — генератор; 4 — двигатель; 5 — тахогенератор; 6 — рабочий механизм
Рис. 2.3. Схема САР угловой скорости электродвигателя
Значения параметров элементов САР
| Вариант | Ту, с | Ку | Кг | Тг, с | Кд, рад/ с*В | Тд, с | Км рад/ с*Н* м | Мс, Н*м | Кгг, В*с/ рад |
| 0,020 | 4,0 | 2,0 | 0,10 | 1,0 | 0,5 | 0,02 | 1,0 | ||
| 0,015 | 5,0 | 1,8 | 0,12 | 0,95 | 0,60 | 0,03 | 0,9 | ||
| 0,018 | 4,5 | 1,7 | 0,15 | 0,85 | 0,70 | 0,04 | |||
| 0,022 | 6,0 | 1,5 | 0,20 | 0,8 | 0,80 | 0,05 | 0,7 | ||
| 0,020 | 5,8 | 1,6 | 0,16 | 1,5 | 0,65 | 0,06 | 0,6 | ||
| 0,025 | 4,2 | 2,0 | 0,25 | 1,4 | 0,75 | 0,07 | 0,5 | ||
| 0,020 | 3,5 | 2,7 | 0,22 | 1,3 | 0,80 | 0,08 | 0,4 | ||
| 0,028 | 6,2 | 2,1 | 0,30 | 1,2 | 0,75 | 0,02 | 0,5 | ||
| 0,018 | 6,5 | 2,3 | 0,16 | 1,0 | 0,50 | 0,013 | 0,6 | ||
| 0,014 | 7,0 | 2,5 | 0,20 | 1,25 | 0,80 | 0,015 | 0,7 |
Значения параметров объекта регулирования и элементов системы для различных вариантов указаны в таблице 2.4. Заданное значение угловой скорости ω = 40 рад/с.
На рисунке 2.4 изображена схема САР давления Р в ресивере (воздухосборнике) 1, который является в данной системе объектом регулирования. Давление в ресивере регулируется посредством изменения количества воздуха Q, зависящего от положения заслонки 2, т.е. от ее линейного перемещения Х3, которое можно рассматривать как регулирующее воздействие на входе объекта регулирования. Внешним возмущением, вызывающим отклонение регулируемой величины — давления Р, является изменение расхода сжатого воздуха Qc.

Рис 2.4 Схема САР давления Р в ресивере
Давление в данной системе контролируется с помощью сильфонного датчика 3, выходная величина которого — перемещение Хс сильфона 5 однозначно зависит от разности сил ΔF= F0— Fp, где Fp— сила, создаваемая давлением Р, F0— сила натяжения пружины 6, которое можно изменять винтом 7.
Перемещение сильфона Хсс помощью потенциометрического преобразователя 4 преобразуется в электрический сигнал — напряжение U, которое усиливается электронным усилителем 8. Выходной сигнал усилителя Uyуправляет электромагнитным приводом 9, связанным с заслонкой 2,
В данной САР сильфонный датчик выполняет функции воспринимающего, задающего и сравнивающего органов. Как воспринимающий орган он контролирует давление Р, преобразуя его в силу Fp. Задание требуемого давления в ресивере обеспечивается посредством силы F0. Как сравнивающий орган сильфон обеспечивает сравнение величин F0 и Fp, в результате чего, как отмечалось ранее, получается ΔF= F0 — Fp — сигнал рассогласования.
Динамические свойства объекта регулирования и элементов САР описываются следующей системой уравнений:

| заслонкой |
Физическая сущность переменных, входящих в уравнения, отражена выше в описании схемы САР. Параметры T0, T1, T2, T3 и К0, Кq, Кв, Кc, Кп, Ку, К3 — соответственно постоянные времени и коэффициенты передачи. Их размерности и значения по вариантам даны в таблице 2.5. Требуемое значение давления Р = 500 кПа.
Значения параметров элементов САР
| Вариант | Т0,с | Ко КПа/мм | Т1,с | Т2,с | Кс мм/Н | Кв Н/кПа | КQ, Кпа*с/м 3 | ΔQC, м3/с | Кп В/мм | Ку | Т3 | К3 Мм/В |
| 1,3 | 0,2 | 0,045 | 2,5 | 0,5 | 0,1 | 0,2 | 0,01 | |||||
| 0, 25 | 0 ,04 | 2,5 | 0,5 | -0, 2 | 0,2 | 0,01 | ||||||
| 0,6 | 3,5 | 0,34 | 0,022 | 2,5 | 0,5 | 0,3 | 0,2 | 0,01 | ||||
| 4,8 | 0,25 | 0,035 | 2,5 | 0,5 | -0,15 | 0,2 | 0,01 | |||||
| 0,7 | 4,5 | 0,3 | 0,04 | 2,5 | 0,5 | 0,12 | 0, 9 | 0,01 | ||||
| 0,8 | 3,5 | 0,18 | 0, 025 | 2 ,5 | 0,5 | -0,2 | 0 ,2 | 0,01 | ||||
| 0,4 | 4,4 | 0,25 | 0,03 | 2,5 | 0,5 | 0,11 | 0,2 | 0,01 | ||||
| 0,65 | 5,5 | 0,2 | 0,02 | 2,5 | 0,5 | -0,12 | 0,2 | 0,01 | ||||
| 0, 7 | 0, 4 | 0 ,025 | 2,5 | 0,5 | 0,14 | 0,2 | 0,01 | |||||
| 0,55 | 0,25 | 0,035 | 2,5 | 0,5 | -0,14 | 0,2 | 0,01 |
На электрических станциях при производстве электроэнергии предъявляют определенные требования к стабильности частоты f генерируемой ЭДС. Частота f однозначно определяется угловой скоростью ω рабочего колеса гидротурбины. В связи с этим гидротурбины на электростанциях оснащают САР угловой скорости. На рисунке 2.5 показана схема одного из вариантов такой САР.
В данной системе объектом регулирования является гидротурбина 1, регулируемой величиной — угловая скорость ω .Она при постоянном расходе воды изменяется в зависимости от нагрузки на валу турбины, т. е. от мощности Р, которая потребляется от генератора 2 (с увеличением мощности угловая скорость снижается, с уменьшением — возрастает). Таким образом, мощность Р является внешним возмущающим воздействием на объекте регулирования. Для регулирования угловой скорости предусмотрена заслонка 3, с помощью которой изменяется расход воды через турбину. Он однозначно зависит от вертикального перемещения X заслонки. Следовательно, перемещение заслонки X можно рассматривать как регулирующее воздействие объекта регулирования. Угловая скорость ω контролируется посредством тахогенератора 4, ЭДС Е которого сравнивается с задающим напряжением U0. Сигнал рассогласования Δ U через усилитель 5 управляет посредством электродвигателя 6 и редуктора 7 заслонкой 3.
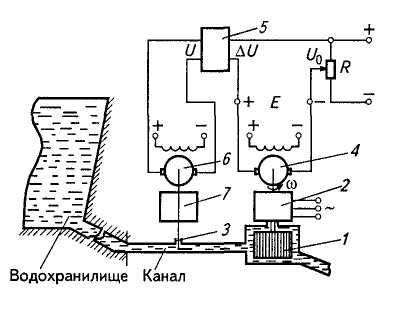 |
Рис. 2.5 Схема САР угловой скорости рабочего колеса гидротурбины
Динамические свойства элементов САР описываются следующей системой уравнений:
Решение системы алгебраических уравнений в символьной форме
Для записи на рабочем листе решения системы уравнений необходимо использовать шаблон (рис.10), который вызывается щелчком левой кнопки мыши опции solve на панели Symbolic(символьные вычисления).

Рис. 10. Шаблон решателя системы алгебраических уравнений
с использованием панели Symbolic:
1 – система уравнений; 2 – список неизвестных; 3 – число значащих цифр в решении после десятичной точки.
На рис. 11,12 приведены несколько вариантов решения системы линейных алгебраических уравнений с использованием панели Symbolic.

Рис. 11. Решение систем линейных алгебраических уравнений в
Следует отметить, что при использовании решающего блока Given…Find система уравнений может быть записана в произвольной форме, а не только в каноническом виде (Рис.11.).

Рис. 12.Пример решения системы линейных алгебраических уравнений
при произвольной форме записи уравнений
Размерные величины в решающем блоке
Размерности также могут присутствовать в решающем блоке, но они должны быть сбалансированы, как это требуется во всех уравнениях MathCad.
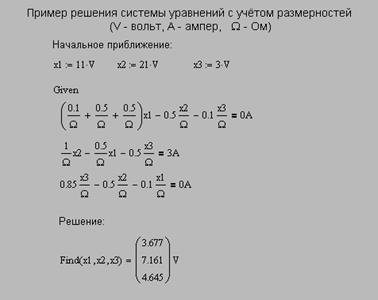
Рис. 13. Пример решения системы уравнений блоком Given…Find
для величин с размерностями.
Сказанное относится ко всем начальным приближениям, константам и условиям, которые должны иметь соответствующие размерности. Решение алгебраических уравнений с учётом размерностей производится решающим блоком Given..Find (рис. 14.) в числовом виде, но возможно и в символической форме (рис. 15)

Рис.14. Пример решения системы уравнений для величин с размерностями
в символическом виде.
Содержание и порядок выполнения работы.
1) Решить систему линейных уравнений на рис. 5 функцией lsolve.
2) то же на рис. 6,7 с помощью решающего блока Given…Find(X).
3) Оценить влияние начального приближения на точность решения системы уравнений (рис.7) блоком Given…Find(X), изменив одно или несколько его значений в пределах +10%.
4) Решить систему нелинейных уравнений (рис. 8) блоком Given…Find(X).
5) Проанализировать влияние начального приближения на решение системы уравнений (рис. 8) , выполнив действия аналогичные п.4.
6) Решить систему нелинейных уравнений ( рис.9) блоком Given…Minerr.
7) Решить уравнения с использованием панели Symbolic (рис. 11-12).
8) Решить систему уравнений с учётом размерностей (рис.13-14).
9) Оформить и распечатать отчёт по лабораторной работе с использованием приложения 1.
10) Решить систему уравнений с помощью различных решающих блоков и функций системы MathCad из таблицы 3 (по указанию преподавателя).
11) Составить отчет по лабораторной работе № 3 согласно приложения 1 настоящего пособия.
Варианты для самостоятельной работы.
http://megaobuchalka.ru/5/12593.html
http://lektsii.org/7-30401.html