Элементарные преобразования системы линейных уравнений.
Алгебра и теория чисел
Лекция 3
Системы линейных уравнений
План
1. Основные понятия и обозначения.
2. Элементарные преобразования системы линейных уравнений.
3. Ступенчатая матрица. Приведение матрицы к ступенчатому виду.
Литература
1. Бугров Я.С., Никольский С.М. Элементы линейной алгебры и аналитической геометрии. 1997, с. 25-48.
2. Ермаков В.И. Общий курс высшей математики. М.: Инфра — М, 2000. с. 5-22
3. Кремер Н.Ш. Высшая математика для экономистов. М.: Юнити, 2000. с. 38-56.
1. Основные понятия и обозначения. Простейшие системы двух линейных уравнений с двумя неизвестными изучаются в средней школе: 

Известно, что справедлив один из следующих трех случаев: либо система имет одно решение, либо имеет бесконечно много решений, либо не имеет решений. В этом параграфе мы будем рассматривать общие системы линейных уравнений и установим это утверждение в общем случае кроме того изложим один из наиболее удобных методов решения систем линейных уравнений — метод последовательного исключения неизвестных или метод Гаусса по имени выдающегося немецкого математика К. Ф. Гаусса (1777-1855).
Определение 1.Системой m линейных уравнений с n неизвестными
 (1)
(1)
где a11 ,a12 . amn — фиксированные числа (действительные, комплексные или принадлежащие некоторому полю) , называемые коэффициентами при неизвестных, b1 ,b2 . bm — фиксированные числа, называемые свободными членами.
Если все свободные члены в системе линейных уравнений равны нулю, то система линейных уравнений называется однородной.
Определение 2.Решением системы линейных уравнений (1) называется такой упорядоченный набор n чисел  , при подстановке которыхв каждое из уравнений системы вместо соответственно неизвестных x1 , x2 . xn каждое из уравнений системы превращается в истинное числовое равенство.
, при подстановке которыхв каждое из уравнений системы вместо соответственно неизвестных x1 , x2 . xn каждое из уравнений системы превращается в истинное числовое равенство.
Система называется совместной, если она имеет хотя бы одно решение, и называется несовместной, если она не имеет решений. Совместная система называется определенной, если она имеет одно решение, и называется неопределенной, если она не имеет решений.
Пусть S1 , S2 системы линейных уравнений с одним и тем же числом неизвестных, X1 , X2 — множества их решений соответственно.
Определение 3.Говорят, что система линейных уравнений S2 следствие системы S1 и S2 , если каждое решение системы S1 является решением системы S2 ,т.е.  . Обозначаем
. Обозначаем  .
.
Определение 4. Говорят, что системы S1 и S2 равносильны, если каждое решение системы S1 является решением системы S2 и каждое решение системы S2 является решением системы S1 , т.е.  . Обозначаем
. Обозначаем  .
.
Отношение следования и равносильности обладают следующими свойствами.
1. Если и  , то
, то  (транзитивность).
(транзитивность).
Действительно, если и , то по определению 3  и
и  Отсюда по свойству включения
Отсюда по свойству включения  и по определению .
и по определению .
2.  (рефлексивность).
(рефлексивность).
3. Если , то  — (симметричность).
— (симметричность).
4. Если и  , то
, то  — (транзитивность).
— (транзитивность).
Свойства 2, 3, 4 доказываются аналогично.
Элементарные преобразования системы линейных уравнений.
Определение 5. Элементарными преобразованиями системы линейных уравнений называются ее следующие преобразования:
1) перестановка любых двух уравнений местами;
2) умножение обеих частей одного уравнения на любое число  ;
;
3) прибавление к обеим частям одного уравнения соответствующих частей другого уравнения, умноженных на любое число k ;
(при этом все остальные уравнения остаются неизменными).
Нулевым уравнением называем уравнение следующего вида:
 .
.
Теорема 1. Любая конечная последовательность элементарных преобразований и преобразование вычеркивание нулевого уравнения переводит одну систему линейных уравнений в равносильную ей другую систему линейных уравнений.
Доказательство.В силу свойства 4 предыдущего пункта достаточно доказать теорему для каждого преобразования отдельно.
1. При перестановке уравнений в системе местами сами уравнения неизменяются, поэтому по определению полученная система равносильная первоначальной .
2. В силу первой части доказательства достаточно доказать утверждение для первого уравнения. Умножим первое уравнение системы (1) на число , получим систему
 (2)
(2)
Пусть  решение системы (1) . Тогда числа
решение системы (1) . Тогда числа  удовлетворяют всем уравнениям системы (1). Так как все уравнения системы (2) кроме первого совпадают с уравнениями системы (1), то числа удовлетворяют всем эти уравнениям. Так как числа удовлетворяют первому уравнению системы (1), то имеет место верное числовое равенство:
удовлетворяют всем уравнениям системы (1). Так как все уравнения системы (2) кроме первого совпадают с уравнениями системы (1), то числа удовлетворяют всем эти уравнениям. Так как числа удовлетворяют первому уравнению системы (1), то имеет место верное числовое равенство:
 . (3)
. (3)
Умножая его на число k,получим верное числовое равенство:
 , (4)
, (4)
т.о. устанавливаем, что решение системы (2).
Обратно, если решение системы (2), то числа удовлетворяют всем уравнениям системы (2). Так как все уравнения системы (1) кроме первого совпадают с уравнениями системы (2), то числа удовлетворяют всем эти уравнениям. Так как числа удовлетворяют первому уравнению системы (2), то справедливо числовое равенство (4). Разделив обе его части на число ,получим числовое равенство (3) и доказываем, что решение системы (1).
Отсюда по определению 4 система (1) равносильна системе (2).
3. В силу первой части доказательства достаточно доказать утверждение для первого и второго уравнения системы . Прибавим к обеим частям первому уравнению системы соответствующие части второго умноженные на число k , получим систему
 (5)
(5)
Пусть решение системы (1) . Тогда числа удовлетворяют всем уравнениям системы (1). Так как все уравнения системы (5) кроме первого совпадают с уравнениями системы (1), то числа удовлетворяют всем эти уравнениям. Так как числа удовлетворяют первому уравнению системы (1), то имеют место верные числовые равенства:
, (6)
 . (7)
. (7)
Прибавляя почленно к первому равенству второе, умноженное на число k получим верное числовое равенство:
 . (8)
. (8)
Обратно, если решение системы (5), то числа удовлетворяют всем уравнениям системы (5). Так как все уравнения системы (1) кроме первого совпадают с уравнениями системы (5), то числа удовлетворяют всем эти уравнениям. Так как числа удовлетворяют первому уравнению системы (5), то справедливо числовое равенство (8). Вычитая из обеих его частей соответствующие части равенства (7) умноженные на число k получим числовое равенство (6).
Отсюда по определению 4 система (1) равносильна системе (5).
4. Так как нулевому уравнению удовлетворяет любой упорядоченный набор из n чисел, то при вычеркивании нулевого уравнения в системе получим систему равносильную исходной.
Ступенчатая матрица.
Определение 6.Матрицей размерности  называется прямоугольная таблица
называется прямоугольная таблица

содержащая mn чисел, расположенных в m строк и n столбцов, числа  называются элементами матрицы. Если
называются элементами матрицы. Если  , то матрица называется квадратной матрицей порядка m . Если все элементы матрицы равны нулю, то матрица называется нулевой матрицей. Элементы aii называются элементами главной диагонали.
, то матрица называется квадратной матрицей порядка m . Если все элементы матрицы равны нулю, то матрица называется нулевой матрицей. Элементы aii называются элементами главной диагонали.
Определение 7. Матрицей ступенчатого вида называется такая матрица, которая обладает свойствами:
1) в каждой строке матрицы имеется неравный нулю элемент;
2) в каждой строке матрицы, начиная со второй, первый слева неравный нулю элемент расположен правее первого слева неравного нулю элемента предыдущей строки матрицы.
Матрицу ступенчатого вида называют также трапециидальной матрицей, а квадратную матрицу ступенчатого вида называют треугольной матрицей. Ниже показаны две не ступенчатые матрицы и три ступенчатые матрицы (последняя матрица треугольная).
 ,
,  ,
, 
 ,
, 
 ,
,  .
.
Определение 8. Элементарными преобразованиями строк матрицы называются следующие ее преобразования:
1) перестановка любых двух строк матрицы местами;
2) умножение одной строки матрицы на любое число  ;
;
3) прибавление к одной строке матрицы другой ее строки умноженной на любое число k ;
(при этом все остальные строки матрицы остаются неизменными).
Аналогично можно рассматривать элементарные преобразования столбцов матрицы.
Теорема 2. Любую ненулевую матрицу конечным числом элементарных преобразований и преобразований вычеркивания нулевой строки можно привести к матрице ступенчатого вида.
Доказательство.Доказательство проводим методом математической индукции по числу m строк матрицы. Для m=1 утверждение теоремы справедливо, так как ненулевая однострочная матрица по определению имеет ступенчатый вид.
Предположим, что утверждение теоремы доказано для матриц, имеющих m-1 строку и докажем его для матриц, в которых содержится m строк. Пусть первый слева отличный от нуля столбец данной матрицы имеет номер k , так как матрица ненулевая, то такой столбец найдется, и матрица имеет вид:
 .
.
Можем считать, что элемент  , в противном случае строки матрицы можно переставить. Прибавим ко второй строке матрицы первую, умноженную на число
, в противном случае строки матрицы можно переставить. Прибавим ко второй строке матрицы первую, умноженную на число  , к третьей — первую , умноженную на
, к третьей — первую , умноженную на  и т.д. , к m-й — первую, умноженную на
и т.д. , к m-й — первую, умноженную на  . После этих преобразований матрица примет вид:
. После этих преобразований матрица примет вид:
 . (9)
. (9)
Рассмотрим матрицу, состоящую из последних m-1 строк матрицы (9):
 . 10)
. 10)
Если матрица (10) нулевая, то все строки в матрице (9) кроме первой нулевые. Вычеркивая их, приходим к матрице ступенчатого вида. Если матрица (10) ненулевая, то по индуктивному предположению конечным число элементарных преобразований и преобразований вычеркивания нулевой строки может быть приведена к матрице ступенчатого вида:  ,
,
где элементы  и
и  не равны нулю. Тогда соответствующими преобразованиями строк матрица (9) преобразуется в матрицу ступенчатого вида:
не равны нулю. Тогда соответствующими преобразованиями строк матрица (9) преобразуется в матрицу ступенчатого вида:
 ; (11)
; (11)
элементы  , . не равны нулю. Теорема доказана.
, . не равны нулю. Теорема доказана.
4. Метод Гаусса. Системе линейных уравнений (1) соответствуют три матриц
, 
 .
.
Первая матрица называется матрицей системы, вторая — расширенной или присойдиненной матрицей системы, третья — столбцом свободных членов.
Система линейных уравнений называется системой ступенчатого вида, если расширенная матрица системы есть матрица ступенчатого вида. Неизвестные с коэффициентами неравными нулю, которые стоят первыми в уравнениях системы ступенчатого вида называются главными неизвестными, а остальные неизвестные называются свободными.
Линейное уравнение, в котором все коэффициенты равны нулю, а свободный член не равен нулю, т.е. уравнение вида:
 ,
,
не имеет решений. Действительно, если — решение этого уравнения, то получим  противоречие с условием. Такое уравнение называем противоречивым.
противоречие с условием. Такое уравнение называем противоречивым.
Пусть не все уравнения системы (1) нулевые. Тогда и расширенная матрица системы (1) ненулевая. По теореме 2 ее можно конечным числом элементарных преобразований и преобразований выбрасывания нулевой строки можно привести к матрице ступенчатого вида. Полученной матрице соответствует система линейных уравнений ступенчатого вида. Этим преобразованиям расширенной матрицы системы (1) соответствуют такие же преобразования системы линейных уравнений (1). По теореме 1 они переводят систему (1) в равносильную систему линейных уравнений, которая будет являются системой ступенчатого вида.
Таким образом мы доказали первую часть следующей теоремы.
Теорема 3.Любую систему линейных уравнений , содержащую ненулевое уравнение конечным числом элементарных преобразований и преобразований вычеркивания нулевого уравнения можно привести к равносильной ей системе ступенчатого вида. При этом возможны следующие три случая.
1. Если в полученной системе линейных уравнений ступенчатого вида есть противоречивое уравнение, то данная система не имеет решений.
2. Если в полученной системе линейных уравнений ступенчатого вида нет противоречивого уравнения и число уравнений в полученной системе равно числу неизвестных, то данная система имеет единственное решение.
3. Если в полученной системе линейных уравнений ступенчатого вида нет противоречивого уравнения и число уравнений в полученной системе меньше числа неизвестных, то данная система имеет бесконечно много решение.
Доказательство.Пусть дана система (1), содержащая ненулевое уравнение. По выше доказанному, она конечным числом элементарных преобразований она может быть преобразована к равносильной ей системе уравнений ступенчатого вида. Возможны случаи.
В полученной системе ступенчатого вида есть противоречивое уравнение. Тогда ни один набор чисел  не удовлетворяет системе, и система (1) не имеет решений.
не удовлетворяет системе, и система (1) не имеет решений.
В полученной системе ступенчатого вида нет противоречивого уравнения. Тогда в каждом из уравнений системы ступенчатого вида содержится главное неизвестное. Отсюда получаем, что число главных неизвестных, а тем более число всех неизвестных, не менее числа уравнений в системе ступенчатого вида. Тогда возможны под случаи:
В системе ступенчатого вида число уравнений равно числу неизвестных, т. е. система имеет вид:

 (12)
(12)
где  Все неизвестные в системе являются главными. Из последнего уравнения находим единственное значение для неизвестного
Все неизвестные в системе являются главными. Из последнего уравнения находим единственное значение для неизвестного  :
:  . Подставляя найденное значение
. Подставляя найденное значение  в предпоследнее уравнение, находим для неизвестного
в предпоследнее уравнение, находим для неизвестного  единственное значение
единственное значение  и т.д. Наконец из первого уравнения по найденным значениям неизвестных
и т.д. Наконец из первого уравнения по найденным значениям неизвестных  из первого уравнения находим единственное значение неизвестного
из первого уравнения находим единственное значение неизвестного  . Таким образом, система (12), а поэтому и система (1) имеет единственное решение.
. Таким образом, система (12), а поэтому и система (1) имеет единственное решение.
В системе ступенчатого вида число уравнений меньше числа неизвестных. В этом случае матрица полученной системы имеет вид (11), а
систему можно записать в виде:


 (13)
(13)
где  В этой системе r главных неизвестных
В этой системе r главных неизвестных 
 , все остальные
, все остальные  свободные (в системе они обзначены точками. Возьмем для свободных неизвестных произвольные значения. Тогда значения главных неизвестных
свободные (в системе они обзначены точками. Возьмем для свободных неизвестных произвольные значения. Тогда значения главных неизвестных  найдутся однозначно из системы (13). Так как главные неизвестные можно выбрать бесконечным числом способов, то получим, что система (13), а поэтому и система (1) имеет бесконечно много решений.
найдутся однозначно из системы (13). Так как главные неизвестные можно выбрать бесконечным числом способов, то получим, что система (13), а поэтому и система (1) имеет бесконечно много решений.
Следствие.Если в системе однородных уравнений число неизвестных больше числа уравнений, то система имеет бесконечно много решений.
Действительно, система однородных уравнений всегда имеет нулевое решение  , и при приведении ее к ступенчатому виду всегда получим систему, в которой число неизвестных больше числа уравнений.
, и при приведении ее к ступенчатому виду всегда получим систему, в которой число неизвестных больше числа уравнений.
Метод исследования и решения систем линейных уравнений, изложенный в доказательстве теорем 3 называется методом Гаусса.
Пример 1.Решить систему


Составим расширенную матрицу системы и приведем ее к ступенчатому виду:
 .
.
Составим по полученной матрице ступенчатого вида систему линейных уравнений ступенчатого вида:


В полученной системе число уравнений равно числу неизвестных и полученная система имеет единственное решение, которое двигаясь вверх последовательно находим:

Решение системы  .
.
Пример 2.Решить систему


Составим расширенную матрицу системы и приведем ее к ступенчатому виду:
 Соответствующая система имеет противоречивое уравнение. Поэтому данная система не имеет решений.
Соответствующая система имеет противоречивое уравнение. Поэтому данная система не имеет решений.
02. Элементарные преобразования системы линейных уравнений
Определение 5. Элементарными преобразованиями системы линейных уравнений называются ее следующие преобразования:
1) перестановка любых двух уравнений местами;
2) умножение обеих частей одного уравнения на любое число  ;
;
3) прибавление к обеим частям одного уравнения соответствующих частей другого уравнения, умноженных на любое число k ;
(при этом все остальные уравнения остаются неизменными).
Нулевым уравнением называем уравнение следующего вида:
 .
.
Теорема 1. Любая конечная последовательность элементарных преобразований и преобразование вычеркивание нулевого уравнения переводит одну систему линейных уравнений в равносильную ей другую систему линейных уравнений.
Доказательство. В силу свойства 4 предыдущего пункта достаточно доказать теорему для каждого преобразования отдельно.
1. При перестановке уравнений в системе местами сами уравнения неизменяются, поэтому по определению полученная система равносильная первоначальной.
2. В силу первой части доказательства достаточно доказать утверждение для первого уравнения. Умножим первое уравнение системы (1) на число , получим систему 
 (2)
(2)
Пусть  решение системы (1) . Тогда числа
решение системы (1) . Тогда числа  удовлетворяют всем уравнениям системы (1). Так как все уравнения системы (2) кроме первого совпадают с уравнениями системы (1), то числа удовлетворяют всем эти уравнениям. Так как числа удовлетворяют первому уравнению системы (1), то имеет место верное числовое равенство:
удовлетворяют всем уравнениям системы (1). Так как все уравнения системы (2) кроме первого совпадают с уравнениями системы (1), то числа удовлетворяют всем эти уравнениям. Так как числа удовлетворяют первому уравнению системы (1), то имеет место верное числовое равенство:
 . (3)
. (3)
Умножая его на число K, получим верное числовое равенство:
 , (4)
, (4)
Т. о. устанавливаем, что решение системы (2).
Обратно, если решение системы (2), то числа удовлетворяют всем уравнениям системы (2). Так как все уравнения системы (1) кроме первого совпадают с уравнениями системы (2), то числа удовлетворяют всем эти уравнениям. Так как числа удовлетворяют первому уравнению системы (2), то справедливо числовое равенство (4). Разделив обе его части на число ,получим числовое равенство (3) и доказываем, что решение системы (1).
Отсюда по определению 4 система (1) равносильна системе (2).
3. В силу первой части доказательства достаточно доказать утверждение для первого и второго уравнения системы. Прибавим к обеим частям первому уравнению системы соответствующие части второго умноженные на число K , получим систему
 (5)
(5)
Пусть решение системы (1) . Тогда числа удовлетворяют всем уравнениям системы (1). Так как все уравнения системы (5) кроме первого совпадают с уравнениями системы (1), то числа удовлетворяют всем эти уравнениям. Так как числа удовлетворяют первому уравнению системы (1), то имеют место верные числовые равенства:
, (6)
 . (7)
. (7)
Прибавляя почленно к первому равенству второе, умноженное на число K получим верное числовое равенство:
 . (8)
. (8)
Обратно, если решение системы (5), то числа удовлетворяют всем уравнениям системы (5). Так как все уравнения системы (1) кроме первого совпадают с уравнениями системы (5), то числа удовлетворяют всем эти уравнениям. Так как числа удовлетворяют первому уравнению системы (5), то справедливо числовое равенство (8). Вычитая из обеих его частей соответствующие части равенства (7) умноженные на число K получим числовое равенство (6).
Отсюда по определению 4 система (1) равносильна системе (5).
4. Так как нулевому уравнению удовлетворяет любой упорядоченный набор из n чисел, то при вычеркивании нулевого уравнения в системе получим систему равносильную исходной.
VMath
Инструменты сайта
Основное
Навигация
Информация
Действия
Содержание
Системы линейных уравнений
Обозначим через $ \mathbb A_<> $ любое из множеств $ \mathbb Q_<>, \mathbb R_<> $ или $ \mathbb C_<> $.
Примеры систем уравнений над $ \mathbb R $.
Относительно числа $ m_<> $ уравнений не делается ни какого предположения: оно может быть меньше, больше или равно числу переменных $ n_<> $. Если $ m_<>>n $ то система называется переопределенной. Решением системы уравнений называется любой набор значений переменных $ x_1=\alpha_<1>,\dots, x_n = \alpha_n $, обращающий каждое из уравнений в истинное равенство. Система называется совместной если она имеет хотя бы одно решение и несовместной в противном случае.
Можно доказать (см. результаты ☟ НИЖЕ ), что все возможности для произвольной системы ограничиваются следующими вариантами:
1. система совместна и имеет единственное решение;
2. cистема совместна и имеет бесконечное множество решений;
3. cистема несовместна.
При этом все решения будут находиться в том же множестве $ \mathbb A_<> $, что и коэффициенты системы.
Матричная форма записи
Для системы линейных уравнений относительно переменных $ x_1,x_2,\dots,x_n $ $$ \left\< \begin
Исключение переменных (метод Гаусса)
метода достаточно проста.
Пример. Решить систему уравнений $$ \left\< \begin
Решение. Выразим из первого уравнения $ x_ <1>$ $$ x_1=\frac<3> <2>x_2+\frac<1> <2>x_3 + \frac<3> <2>$$ и подставим в оставшиеся уравнения $$ 4 \left(\frac<3> <2>x_2+\frac<1> <2>x_3 + \frac<3><2>\right) -3\,x_2-5\,x_3=6 \ <\color
Ответ. $ x_<1>=1/4, x_2=-5/8, x_3=-5/8 $.
Теперь осталось формализовать изложенную идею метода (сформулировав допустимые правила действия над уравнениями — те, что в принципе, очевидны из здравого смысла ), а также исследовать возможные последствия его применения к системам общего вида.
Исключение переменных
Элементарными преобразованиями системы л.у. называются преобразования следующих трех типов:
1. перестановка двух уравнений;
2. умножение обеих частей уравнения на любое отличное от нуля число;
3. прибавление к одному уравнению любого другого, умноженного на произвольное число: пара уравнений $$ \begin
Теорема. Любое элементарное преобразование системы л.у. переводит эту систему в ей эквивалентную, т.е. имеющую то же множество решений, что и исходная.
Задача. С помощью элементарных преобразований привести систему л.у. к наиболее простому виду: такому, из которого легко было бы установить множество решений.
Предположим, что первое уравнение системы содержит явно неизвестную $ x_ <1>$, т.е. $ a_<11>^<> \ne 0 $. Исключим эту неизвестную из всех оставшихся уравнений. С этой целью вычтем из второго уравнения первое, домноженное на $ a_<21>/a_<11>^<> $. Получим $$\left(a_<22>— \frac
Понятно, что процесс исключения может быть продолжен и далее. Теперь посмотрим, где он может прерваться. Может так случиться, что очередная, $ \ell_<> $-я подсистема имеет коэффициент $ a_<\ell \ell>^ <[\ell-1]>$ равным нулю, что не позволит алгоритму идти дальше — т.е. исключить переменную $ x_<\ell>^<> $ из оставшихся уравнений (в принципе, такое могло случиться уже на первом шаге, если бы коэффициент $ a_<11>^<> $ был бы равен нулю). Возможные варианты дальнейших действий:
1. если хотя бы один коэффициент при $ x_<\ell>^<> $ в одном из оставшихся уравнений отличен от нуля: $ a_
2. если при всех $ j\ge \ell^<> $ коэффициенты $ a_
Поскольку число переменных конечно, то алгоритм исключения должен завершиться за конечное число шагов. Чем он может завершиться? Окончательная система должна иметь вид: $$ \left\< \begin
Предположение . Мы будем считать, что каждое из первых $ <\mathfrak r>_<> $ уравнений системы содержит в своей левой части хотя бы одну переменную с ненулевым коэффициентом.
Процесс получения системы такого вида из исходной системы уравнений называется прямым ходом метода Гаусса.
Исторический комментарий о Гауссе ☞ ЗДЕСЬ.
Установление множества решений
Теорема. Если хотя бы одно из чисел $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>,\dots , b_
Для простоты мы будем иллюстрировать наши рассуждения на системах л.у. над $ \mathbb R_<> $, в этом же множестве искать решения. Каждое из преобразований метода Гаусса будем обозначать $ \to_<> $.
Пример. Решить систему л.у.
$$ \left\< \begin
Решение. $$ \ \to \ \left\< \begin
Ответ. Система несовместна.
Пусть теперь $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>=0,<>\dots, b_ Из последнего уравнения системы можно однозначно установить значение $ x_
Из последнего уравнения системы можно однозначно установить значение $ x_
Теорема. Если прямой ход метода Гаусса заканчивается треугольной системой, т.е. $ \mathfrak r = n_<> $ и $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>=0,<>\dots, b_
Пример. Решить систему л.у.
$$ \left\< \begin
Ответ. $ x_1=1,\, x_<2>=2,\, x_3=-2 $ .
Исследуем теперь случай $ <\mathfrak r>1) :  На основании предположения , в $ <\mathfrak r>$-м уравнении этой системы имеется хотя бы один ненулевой коэффициент в левой части, пусть $ a_ <<\mathfrak r><\mathfrak s>>^<[<\mathfrak r>-1]>\ne 0 $ — первый из них. Если $ <\mathfrak s>=n $, то из этого уравнения однозначно определится $ x_
На основании предположения , в $ <\mathfrak r>$-м уравнении этой системы имеется хотя бы один ненулевой коэффициент в левой части, пусть $ a_ <<\mathfrak r><\mathfrak s>>^<[<\mathfrak r>-1]>\ne 0 $ — первый из них. Если $ <\mathfrak s>=n $, то из этого уравнения однозначно определится $ x_
Теорема. Если прямой ход метода Гаусса заканчивается трапециевидной системой, т.е. $ \mathfrak r 2) матрицы $ A_<> $ (третьего порядка). Понятие определителя распространяется и на квадратные матрицы бóльших порядков; образно говоря, определитель — это функция элементов матрицы, отвечающая за единственность решения системы уравнений.
Дальнейший матричный анализ метода Гаусса ☞ ЗДЕСЬ.
Формулы Крамера
Рассмотрим систему линейных уравнений с квадратной матрицей $ A_<> $, т.е. такую, у которой число уравнений совпадает с числом неизвестных.
Теорема. Cистема
$$ \left\<\begin
Доказательство ☞ ЗДЕСЬ
Пример. Решить систему уравнений
$$ \left\<\begin
Решение. $$ x_1=\frac<\left|\begin
Решение системы линейных уравнений с квадратной матрицей $ A_<> $ является непрерывной функцией коэффициентов этой системы при условии, что $ \det A_<> \ne 0 $.
Кроме того, формулы Крамера начинают конкурировать по вычислительной эффективности с методом Гаусса в случае систем, зависящих от параметра. Подробнее ☞ ЗДЕСЬ.
Еще один способ решения системы основан на построении обратной матрицы: $$ AX= <\mathcal B>\quad \Rightarrow \quad X=A^<-1> <\mathcal B>\ . $$ Этот способ малоэффективен при фиксированных числовых $ A_<> $ и $ <\mathcal B>_<> $.
Найти достаточное условие существования общего решения систем уравнений:
$$ A_1 X = <\mathcal B>_1 \quad u \quad A_2 Y = <\mathcal B>_2 \ , $$ при квадратных матрицах $ A_1 $ и $ A_2 $ одинакового порядка.
Теорема Кронекера-Капелли
Матрица, получающаяся конкатенацией матрицы $ A_<> $ и столбца правых частей $ <\mathcal B>_<> $ $$ [ A| <\mathcal B>] = \left( \begin
Теорема [Кронекер, Капелли]. Система $ AX= <\mathcal B>$ совместна тогда и только тогда, когда ранг матрицы этой системы совпадает с рангом ее расширенной матрицы:
$$ \operatorname
Доказательство необходимости. Пусть существует решение $ x_1=\alpha_1,\dots,x_n=\alpha_n $ системы, тогда $$\alpha_1 A_<[1]>+\dots+\alpha_n A_<[n]>= <\mathcal B>\ ,$$ т.е. столбец $ <\mathcal B>$ линейно выражается через столбцы $ A_<[1]>,\dots,A_ <[n]>$. Но тогда $$ \operatorname
Доказательство достаточности проводится в следующем пункте. ♦
Пример. Исследовать совместность системы уравнений
Решение. В этом примере число уравнений совпадает с числом неизвестных. Это обстоятельство несколько облегчает рассуждения. Обратимся к замечанию из предыдущего пункта: система л.у. с числом уравнений, совпадающем с числом неизвестных, как правило, совместна. Тогда попробуем установить условия, обеспечивающие противоположное свойство — несовместность. Оно, фактически, единственно: за все отвечает определитель системы $ \det A_<> $. Если он отличен от нуля — система совместна. $$\det A = \left| \begin
Осталось исследовать критические случаи: $ <\color
При $ <\color
Ответ. Система несовместна при $ <\color
Система однородных уравнений
$$ \left\< \begin
Пример. Найти условие, при котором три точки плоскости с координатами $ (x_1,y_1), (x_2,y_2) $ и $ (x_3,y_<3>) $ лежат на одной прямой.
Решение. Будем искать уравнение прямой в виде $ ax+by+c=0 $ при неопределенных коэффициентах $ a,b,c_<> $. Если точки лежат на прямой, то получаем для определения этих коэффициентов систему линейных уравнений: $$ \left\< \begin
Доказать, что для совместности системы
$$ \left\< \begin
An elementary treatise on determinants
в следующей формулировке.
Теорема. Для того чтобы система $ n_<> $ неоднородных уравнений была совместна, необходимо и достаточно, чтобы порядок наибольшего отличного от нуля минора был одинаков в расширенной и нерасширенной матрице системы.
Додсон — один из самых знаменитых математиков мира. Назовите его псевдоним.
Ответ ☞ ЗДЕСЬ
Общее решение
Пусть выполнено условие теоремы Кронекера-Капелли: $ \operatorname
Пусть теперь $ \mathfrak
Пример. Исследовать совместность и найти общее решение системы уравнений:
Решение проведем двумя способами, соответствующими двум способам вычисления ранга матрицы. Вычисляем сначала ранг матрицы $ A $ по методу окаймляющих миноров: $$ |2| \ne 0,\quad \left| \begin
Ненулевой минор третьего порядка (базисный минор) находится в первой, второй и четвертых строках, что означает линейную независимость соответствующих уравнений. Третье уравнение линейно зависит от остальных, и может быть отброшено. Далее, указанный базисный минор образован коэффициентами при $ x_1,x_3 $ и $ x_4 $. Следовательно оставшиеся уравнения могут быть разрешены относительно этих переменных, т.е. они — зависимые, а $ x_2 $ и $ x_5 $ — основные. Использование формулы дает общее решение $$ \begin
Ответ. Общее решение системы: $ x_1=1/2 (x_2+x_5-1),\ x_3=3-4\,x_5,\ x_4=0 $.
Проанализируем теперь полученные общие формулы для общего решения. В этих формулах $ \beta_j $ представляет решение системы, получаемое при $ x_<\mathfrak
Вывод. Формула общего решения системы $ A X=\mathcal B $: $$ x_j=\beta_j + \gamma_
Теорема. Общее решение системы уравнений $ A X=\mathcal B $ представимо в виде суммы какого-то частного решения этой системы и общего решения соответствующей однородной системы $ A X=\mathbb O $.
Доказательство тривиально если система $ A X=\mathcal B $ имеет единственное решение. Если же решений бесконечно много, то выбрав какое-то одно частное $ X=X_1 $ мы получаем, что любое другое частное решение $ X=X_2 $ должно быть связано с первым соотношением $$ A(X_2-X_1)=\mathbb O , $$ т.е. разность частных решений неоднородной системы обязательно является решением однородной системы уравнений $ AX=\mathbb O $. ♦
Теперь посмотрим как можно описать общее решение однородной системы.
Система однородных уравнений
Система линейных уравнений называется однородной, если все коэффициенты правых частей равны нулю: $$ \left\< \begin
Задача ставится о поиске нетривиального решения. Оно не всегда существует. Так, к примеру, если матрица $ A_<> $ системы — квадратная и имеет ненулевой определитель, то, согласно теореме Крамера, нетривиальных решений у однородной системы нет. Теорема Кронекера-Капелли утверждает, что условие $ \det (A_<>) = 0 $ является и достаточным для существования нетривиального решения.
Теорема 1. Для того, чтобы система однородных уравнений с квадратной матрицей $ A_<> $ имела нетривиальное решение необходимо и достаточно, чтобы $ \det (A_<>) = 0 $.
Для произвольной (не обязательно квадратной) матрицы $ A_<> $ имеет место следующий общий результат.
Теорема 2. Если $ \operatorname
Теорема 3. Множество решений системы однородных уравнений образует линейное подпространство пространства $ \mathbb A^
Пусть матрица системы $ AX=\mathbb O $ квадратная и
$$ \operatorname
Теперь обсудим способы нахождения ФСР.
1. Первый из них получается из общего метода решения системы линейных уравнений, рассмотренного в предыдущем пункте. Так же, как и в том пункте, сделаем упрощающее обозначения предположение, что зависимыми переменными являются первые $ x_<1>,\dots,x_ <\mathfrak r>$, т.е. общее решение задается формулами $$ x_j=\gamma_
Оформим этот способ построения ФСР в теорему:
Теорема 4. Если система уравнений $ AX=\mathbb O $ имеет структуру матрицы $ A_<> $ вида:
$$ A = \left[ E_ <\mathfrak r>\mid P_ <\mathfrak r \times (n-\mathfrak r)>\right] \ , $$ то ее ФСР состоит из столбцов матрицы $$ \left[ \begin
Пример. Найти ФСР для системы уравнений
Решение. Приводим систему к трапециевидному виду: $$ \left\< \begin
2. Этот способ напоминает вычисление обратной матрицы методом приписывания единичной матрицы. Транспонируем матрицу $ A_<> $ системы и припишем к ней справа единичную матрицу порядка $ n_<> $: $$ \left[ A^ <\top>| E_n \right] = \left(\begin
Пример. Найти ФСР для системы уравнений
$$ \left\< \begin
$$ \left(\begin
3. Еще один способ построения ФСР основан на теореме Гамильтона-Кэли.
Теорема. Пусть матрица системы $ AX=\mathbb O $ квадратная и $ \operatorname
Пример. Найти ФСР для системы уравнений
Решение. Здесь $$ A= \left( \begin
Блок-схемы зависимости множества решений системы уравнений $ AX= \mathcal B $ от комбинации чисел $ n, \mathfrak r $ ☞ ЗДЕСЬ.
Геометрическая интерпретация
Геометрический смысл введенных определений поясним на примере $ \mathbb R^ <3>$. Уравнение $$ a_1x_1+a_2x_2+a_3x_3=b $$ — при фиксированных вещественных коэффициентах $ a_1,a_2,a_3 $ (хотя бы один из них считаем отличным от нуля) и $ b_<> $ — задает плоскость. Если, к примеру, $ a_1\ne 0 $, то из уравнения получаем выражение для $ x_ <1>$ как функции $ x_2,x_3 $: $$ x_1=\frac
Теорема. Общее решение системы уравнений $ A X=\mathcal B $ представимо в виде суммы какого-то частного решения этой системы и общего решения соответствующей однородной системы $ A X=\mathbb O $.
 Координаты произвольной точки плоскости $ a_1x_1+a_2x_2+a_3x_3=0 $ задаются соотношениями $$ \left( \begin
Координаты произвольной точки плоскости $ a_1x_1+a_2x_2+a_3x_3=0 $ задаются соотношениями $$ \left( \begin
Теперь рассмотрим систему из двух уравнений: $$ \left\<\begin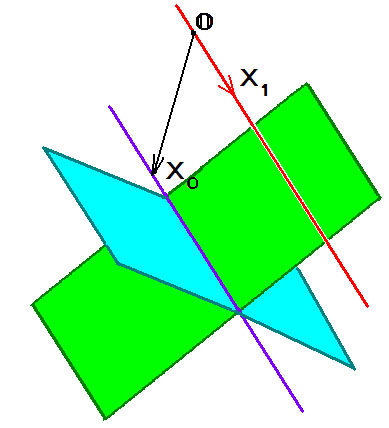 Очевидно, что любой из векторов $ X_ <1>$ или $ \tilde X_1 $ задает фундаментальную систему решений однородной системы уравнений 10) $$ \left\<\begin
Очевидно, что любой из векторов $ X_ <1>$ или $ \tilde X_1 $ задает фундаментальную систему решений однородной системы уравнений 10) $$ \left\<\begin
Мы рассмотрели пока только случай пересекающихся плоскостей в пространстве. Его можно считать общим, т.е. случаем «как правило»: две случайным образом выбранные плоскости в $ \mathbb R^ <3>$ пересекаться будут. Исследуем теперь исключительный случай — параллельности плоскостей. Исключительность этого случая может быть проверена и аналитикой. Для несовместности системы из двух уравнений необходимо, чтобы ранг ее матрицы $$ \left( \begin
Перейдем теперь к системе из трех уравнений: $$ \left\< \begin
Теорема Кронекера-Капелли в этом случае не нужна — нет, она остается справедливой! — но проверка условия на ранги матриц тривиальна: они оба равны $ 3_<> $. Если же указанный определитель обращается в нуль, то этот факт эквивалентен тому, что три строки определителя линейно зависимы. Например, возможно, что строка $ (a_<31>,a_<32>, a_<33>) $ может быть представлена в виде линейной комбинации первых двух строк. Вспомним геометрический смысл этих строк: они задают координаты векторов, перпендикулярных соответствующим плоскостям. Если система уравнений $$ \left\<\begin
Статья не закончена!
Ортогональность
Геометрические соображения из предыдущего пункта могут быть обобщены на случай когда размерности рассматриваемых пространств увеличиваются, и мы говорим о точках и векторах многомерных пространств. В последующих пунктах нам потребуются понятия линейной оболочки, линейного пространства, размерности, базиса и координат применительно к векторам-столбцам или векторам-строкам. Их можно найти ☞ ЗДЕСЬ.
Задача решения системы линейных уравнений $$ \left\< \begin
С другой стороны, к той же задаче решения системы уравнений, в предыдущем ПУНКТЕ мы подошли с другой стороны. Первое из уравнений системы $$ 3\,x_1+4\,x_2-x_3=2 $$ можно интерпретировать так: скалярное произведение векторов $ \vec<<\mathbf OA>^<[1]>> $ и $ \vec<<\mathbf OX>> $ равно фиксированному числу $ 2_<> $. Здесь вектора рассматриваются в пространстве строк $ \mathbb R_<>^ <3>$; считается, что каждый вектор имеет начало в начале координат $ \mathbf O=[0,0,0] $, а конец — в точке с координатами $ [3,4,-1] $ или, соответственно, $ [x_1,x_2,x_3] $. Если скалярное произведение векторов обозначать скобками $ \langle <> \mbox < >\rangle $, то систему уравнений можно переписать в виде $$ \langle \vec<<\mathbf OA>^<[1]>> ,\ \vec<<\mathbf OX>> \rangle=2,\ \langle \vec<<\mathbf OA>^<[2]>> ,\ \vec<<\mathbf OX>> \rangle=1 \quad npu \quad A^ <[1]>= [3,4,-1], A^<[2]>=[1,-2,3] $$ — строках матрицы $ A_<> $. И задачу решения такой системы понимать в смысле: найти координаты всех векторов-строк $ [x_1,x_2,x_3] $ которые обеспечат нам заданные значения скалярных произведений с двумя фиксированными векторами.
Геометрическая интерпретация еще более упрощается если рассмотреть случай однородной системы уравнений. Так, решить систему уравнений $$ \left\< \begin
Все эти геометрические соображения обобщаются в произвольное пространство $ \mathbb R_<>^
В терминах скалярного произведения, задачу решения системы линейных уравнений можно переформулировать как поиск строки $ X=[x_1,x_2,\dots,x_n] $, ортогональной всем строкам матрицы $ A_<> $: $$ \langle A^<[1]>,X \rangle=0, \langle A^<[2]>,X \rangle=0,\dots, \langle A^<[m]>,X \rangle=0 \ . $$ Множество таких строк образует линейное подпространство пространства $ \mathbb R_<>^
Теорема. $ \operatorname
http://matica.org.ua/metodichki-i-knigi-po-matematike/algebra-i-geometriia-tolstikov-a-v/02-elementarnye-preobrazovaniia-sistemy-lineinykh-uravnenii
http://vmath.ru/vf5/algebra2/linearsystems