Матричный метод решения СЛАУ: пример решения с помощью обратной матрицы
В данной статье мы расскажем о матричном методе решения системы линейных алгебраических уравнений, найдем его определение и приведем примеры решения.
Метод обратной матрицы — это метод, использующийся при решении СЛАУ в том случае, если число неизвестных равняется числу уравнений.
Найти решение системы n линейных уравнений с n неизвестными:
a 11 x 1 + a 12 x 2 + . . . + a 1 n x n = b 1 a n 1 x 1 + a n 2 x 2 + . . . + a n n x n = b n
Матричный вид записи: А × X = B
где А = а 11 а 12 ⋯ а 1 n а 21 а 22 ⋯ а 2 n ⋯ ⋯ ⋯ ⋯ а n 1 а n 2 ⋯ а n n — матрица системы.
X = x 1 x 2 ⋮ x n — столбец неизвестных,
B = b 1 b 2 ⋮ b n — столбец свободных коэффициентов.
Из уравнения, которое мы получили, необходимо выразить X . Для этого нужно умножить обе части матричного уравнения слева на A — 1 :
A — 1 × A × X = A — 1 × B .
Так как А — 1 × А = Е , то Е × X = А — 1 × В или X = А — 1 × В .
Обратная матрица к матрице А имеет право на существование только, если выполняется условие d e t A н е р а в е н н у л ю . Поэтому при решении СЛАУ методом обратной матрицы, в первую очередь находится d e t А .
В том случае, если d e t A н е р а в е н н у л ю , у системы имеется только один вариант решения: при помощи метода обратной матрицы. Если d e t А = 0 , то систему нельзя решить данным методом.
Пример решения системы линейных уравнений с помощью метода обратной матрицы
Решаем СЛАУ методом обратной матрицы:
2 x 1 — 4 x 2 + 3 x 3 = 1 x 1 — 2 x 2 + 4 x 3 = 3 3 x 1 — x 2 + 5 x 3 = 2
- Записываем систему в виде матричного уравнения А X = B , где
А = 2 — 4 3 1 — 2 4 3 — 1 5 , X = x 1 x 2 x 3 , B = 1 3 2 .
- Выражаем из этого уравнения X :
- Находим определитель матрицы А :
d e t A = 2 — 4 3 1 — 2 4 3 — 1 5 = 2 × ( — 2 ) × 5 + 3 × ( — 4 ) × 4 + 3 × ( — 1 ) × 1 — 3 × ( — 2 ) × 3 — — 1 × ( — 4 ) × 5 — 2 × 4 — ( — 1 ) = — 20 — 48 — 3 + 18 + 20 + 8 = — 25
d e t А не равняется 0, следовательно, для этой системы подходит метод решения обратной матрицей.
- Находим обратную матрицу А — 1 при помощи союзной матрицы. Вычисляем алгебраические дополнения А i j к соответствующим элементам матрицы А :
А 11 = ( — 1 ) ( 1 + 1 ) — 2 4 — 1 5 = — 10 + 4 = — 6 ,
А 12 = ( — 1 ) 1 + 2 1 4 3 5 = — ( 5 — 12 ) = 7 ,
А 13 = ( — 1 ) 1 + 3 1 — 2 3 — 1 = — 1 + 6 = 5 ,
А 21 = ( — 1 ) 2 + 1 — 4 3 — 1 5 = — ( — 20 + 3 ) = 17 ,
А 22 = ( — 1 ) 2 + 2 2 3 3 5 — 10 — 9 = 1 ,
А 23 = ( — 1 ) 2 + 3 2 — 4 3 — 1 = — ( — 2 + 12 ) = — 10 ,
А 31 = ( — 1 ) 3 + 1 — 4 3 — 2 4 = — 16 + 6 = — 10 ,
А 32 = ( — 1 ) 3 + 2 2 3 1 4 = — ( 8 — 3 ) = — 5 ,
А 33 = ( — 1 ) 3 + 3 2 — 4 1 — 2 = — 4 + 4 = 0 .
- Записываем союзную матрицу А * , которая составлена из алгебраических дополнений матрицы А :
А * = — 6 7 5 17 1 — 10 — 10 — 5 0
- Записываем обратную матрицу согласно формуле:
A — 1 = 1 d e t A ( A * ) T : А — 1 = — 1 25 — 6 17 — 10 7 1 — 5 5 — 10 0 ,
- Умножаем обратную матрицу А — 1 на столбец свободных членов В и получаем решение системы:
X = A — 1 × B = — 1 25 — 6 17 — 10 7 1 — 5 5 — 10 0 1 3 2 = — 1 25 — 6 + 51 — 20 7 + 3 — 10 5 — 30 + 0 = — 1 0 1
Ответ: x 1 = — 1 ; x 2 = 0 ; x 3 = 1
Линейная алгебра — примеры с решением заданий и выполнением задач
Содержание:
Линейная алгебра
Линейная алгебра — раздел алгебры, изучающий объекты линейной природы: векторные (или линейные) пространства, линейные отображения, системы линейных уравнений, среди основных инструментов, используемых в линейной алгебре — определители, матрицы, сопряжение. Теория инвариантов и тензорное исчисление обычно (в целом или частично) также считаются составными частями линейной алгебры.
Матрицы и операции над ними
В математике и ее приложениях наряду с числами часто бывает удобным использовать числовые таблицы, которые называются матрицами. Аппарат теории матриц эффективно применяется, например, при решении систем линейных уравнений, как мы скоро в этом убедимся. Перейдем к точным определениям.
Определение: Матрицей размерности m х n называется прямоугольная таблица действительных чисел, состоящая из m строк и n столбцов.
Числа, составляющие матрицу, называются ее элементами. Для доступа к элементам матрицы используются два индекса: первый указывает на номер строки, второй — на номер столбца, на пересечении которых расположен данный элемент.
Обозначаются матрицы, как правило, прописными латинскими буквами A, B, C,иногда указывается размерность, например, Amxn. В развернутой форме матрица записывается как таблица:
Более компактно с указанием элементов матрица записывается в виде: 
Матрицы А и В одинаковой размерности считаются равными, если все элементы одной матрицы равны соответвующим элементам другой матрицы.
Рассмотрим некоторые специальные виды матриц.
Матрица, у которой все элементы равны нулю, называется нуль-матрицей и обозначается через O.
Матрица, у которой число строк равно числу столбцов, называется квадратной. Размерность квадратной матрицы часто называют ее порядком.
Числа  в квадратной матрице
в квадратной матрице  называются диагональными элементами. Совокупность диагональных элементов составляет главную диагональ квадратной матрицы.
называются диагональными элементами. Совокупность диагональных элементов составляет главную диагональ квадратной матрицы.
Квадратная матрица, диагональные элементы которой равны единице, а все остальные — нулю, называется единичной матрицей и обозначается через  где n — порядок матрицы.
где n — порядок матрицы.
Квадратная матрица называется треугольной, если все ее элементы, расположенные ниже (выше) главной диагонали, равны нулю. Например, треугольной является матрица
Матрица называется трапециевидной, если она представляет собой следующую таблицу:
Операции над матрицами
Введем сначала линейные операции над матрицами.
Произведением действительного числа  на матрицу
на матрицу  называется матрица
называется матрица

Суммой двух матриц  одинаковой размерности называется матрица
одинаковой размерности называется матрица

Таким образом, элементы суммы матриц равны суммам соответствующих элементов данных матриц.
Разность матриц А и B можно определить как А — В = А + (-1)В.
Свойства линейных операций над матрицами аналогичны соответствующим свойствам действительных чисел.
Пример №1

Найти матрицу -2А +3В.


Определим теперь операцию умножения матриц. Рассмотрим сначала матрицу-строку и матрицу-столбец с одинаковым числом элементов, т.е.
Произведением этих строки и столбца называется число1

Рассмотрим так называемые согласованные матрицы  , у первой из которых число столбцов равно числу строк второй матрицы. Обозначим строку с номером i матрицы А через
, у первой из которых число столбцов равно числу строк второй матрицы. Обозначим строку с номером i матрицы А через  а столбец с номером j матрицы B через
а столбец с номером j матрицы B через 
Произведением данных согласованных матриц А и B называется матрица

Часто для суммы n чисел  мы будем использовать короткое обо значение
мы будем использовать короткое обо значение 
размерности m х p, элементы которой равны произведениям строк матрицы A на столбцы B.
Пример №2
Найти произведение согласованных матриц
Решение. Найдем произведение строк матрицы А на столбцы матрицы В.

Осталось записать искомое произведение матриц:
Отметим некоторые свойства произведения матриц1. 
Первые три сразу следуют из определения произведения матриц. Докажем последнее свойство. Пусть заданы три матрицы  Элемент dij произведения (AB)C равен произведению строки с номером i матрицы AB на столбец с номером j матрицы C :
Элемент dij произведения (AB)C равен произведению строки с номером i матрицы AB на столбец с номером j матрицы C :  Поменяв порядок суммирования в последней двойной сумме, получим:
Поменяв порядок суммирования в последней двойной сумме, получим:

что представляет собой произведение Тем строки с номером i матрицы A на столбец с номером j матрицы ВС. Тем самым свойство 4 доказано.
Заметим, что в отличие от чисел матрицы, вообще говоря, не коммутируют (не перестановочны). Приведем соответствующий
Контрпример. Доказать, что матрицы


Таким образом, для этих матриц 
Замечание. Пользуясь случаем, введем здесь определение n-мерного векторного пространства Rn, как множество упорядоченных совокупностей n действительных чисел. Каждую такую совокупность мы будем обозначать через и называть n-мерным вектором.
Мы предполагаем, что все матрицы в свойствах согласованы.
Очевидно, каждый вектор мы можем отождествить с соответствующей матрицей-строкой или матрицей-столбцом, поэтому на векторы автоматически переносятся линейные операции, которые мы определили выше для матриц.
Определитель матрицы и его свойства
Познакомимся теперь с такой важнейшей характеристикой матрицы, как определитель. Введем предварительно понятие перестановки и изучим некоторые ее свойства.
Перестановки
Перестановкой n натуральных чисел 1, 2, . n называется строка
 (1)
(1)
содержащая все эти числа.
Первым элементом перестановки может быть любое из чисел 1, 2, . n, вторым — любое из оставшихся n — 1 чисел и так далее, следовательно, число различных перестановок данных чисел равно  (читается n-факториал).
(читается n-факториал).
Два числа в перестановке находятся в инверсии, если большее из них имеет меньший номер. Число всех инверсий в перестановке (1) мы обозначим через 
В связи с этим перестановка (1) называется четной, если в ней число  четно и нечетной — в противном случае.
четно и нечетной — в противном случае.
Отметим два свойства перестановок, которые мы будем использовать ниже.
Лемма 1. Характер четности перестановки изменится на противоположный, если в ней поменять местами какие-нибудь два элемента.
Доказательство. Предположим сначала, что меняются местами рядом стоящие элементы к и l перестановки. В этом случае число инверсий в новой перестановке изменится на единицу, а именно, увеличится на единицу, если к и l не находились в инверсии, или настолько же уменьшится, если они находились в инверсии. Таким образом, характер четности перестановки изменится на противоположный. Рассмотрим теперь случай, когда числа к и l разделяют s других элементов перестановки. Тогда поменять местами данные элементы мы можем последовательно переставляя число к с s промежуточными элементами, а затем переставляя число l в обратном порядке с элементом к и всеми s промежуточными. В результате мы выполним 2s + 1 обменов рядом стоящих элементов и, таким образом, характер четности исходной перестановки изменится нечетное число раз и, следовательно, он изменится на противоположный. Лемма доказана.
Из этой леммы сразу же следует, что количество четных перестановок равно количеству нечетных. В самом деле, поменяв местами любые два элемента в каждой из p четных перестановок, мы получим p нечетных и, следовательно,  где q — количество нечетных перестановок. Аналогично мы можем убедиться в справедливости неравенства
где q — количество нечетных перестановок. Аналогично мы можем убедиться в справедливости неравенства  Из этих неравенств и следует, что p = q.
Из этих неравенств и следует, что p = q.
Лемма 2. Пусть
 (2)
(2)
— перестановка чисел 1, 2, . n — 1. Зафиксируем число j из множества <1, 2, . , n>и оставим его перестановку (2) на место с номером i, сдвинув вправо на одну позицию все ее элементы с номерами i, i + 1, . , n — 1 и увеличив на единицу все не меньшие, чем j элементы этой перестановки. В результате получим перестановку
 (3)
(3)
чисел 1, 2, . , n. Четности перестановок (2) и (3) связаны равенством

Действительно, предположим сначало, что элемент j в перестановке (3) стоит на первом месте. Тогда, очевидно, количество инверсий в этой перестановке равно  Перегоним теперь число j на место с номером i, последовательно обменивая его со следующими i — 1 элементами. По лемме 1 характер четности перестановки изменится i — 1 ра и, значит,
Перегоним теперь число j на место с номером i, последовательно обменивая его со следующими i — 1 элементами. По лемме 1 характер четности перестановки изменится i — 1 ра и, значит,

Определитель и его вычисление для матриц второго и третьего порядков
Рассмотрим квадратную матрицу порядка n :
Составим произведение элементов данной матрицы, взятых по одному из каждой строки и каждого столбца. Упорядочив элементы этого произведения по возрастанию номеров строк, мы можем записать его в виде:

Номера столбцов в записанном произведении образуют перестановку чисел 1, 2, . , n.
Определение: Число, равное сумме всех n! произведений

называется определителем данной квадратной матрицы А (определителем n-го порядка) и обозначается через |А| или det А. В развернутой форме определитель записывается как
Найдем пользуясь этим определением выражение для определителей второго и третьего порядков.
Так как  то
то
Аналогично, для вычисления определителя третьего порядка найдем число инверсий в каждой из перестановок чисел 1, 2, 3 :

Тогда
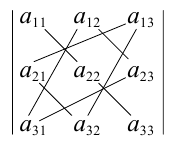
Для упрощения вычисления определителя третьего порядка можно использовать правило треугольников, согласно которому со знаком » + » следует брать произведения по схеме
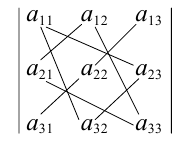
а со знаком » — » — по схеме
Пример №3
Решение. Воспользуемся правилом треугольников:  = —2 + 6 — 6 — 9 — 8 — 1 = -20.
= —2 + 6 — 6 — 9 — 8 — 1 = -20.
Свойства определителя
1) Если какая-либо строка (столбец) определителя состоит из нулей, то и определитель равен нулю.
2) Общий множитель элементов какой-либо строки (столбца) можно выносить за знак определителя.
3) Если все элементы какой-нибудь строки (столбца) определителя равны суммам двух слагаемых, то данный определитель равен сумме двух определителей, в которых в указанной строке (столбце) стоят, соответственно, первые и вторые слагаемые, а остальные элементы обоих определителей такие же, как и в исходном определителе.
Эти свойства напрямую следуют из определения определителя.
4) Если переставить две какие-нибудь строки (столбца) определителя, то он поменяет знак на противоположный.
Действительно, переставим, например, две строки определителя. В результате получим определитель, каждое слагаемое которого отличается знаком от соответствующего слагаемого исходного определителя, так как по доказанной в пункте 1 лемме 1 четность соответствующей перестановки вторых индексов изменится па противоположную.
5) Если в определителе совпадают (пропорциональны) две какие-нибудь строки (столбцы), то этот определитель равен нулю.
В самом деле, если в определителе совпадают две каие-нибудь строки (столбцы), то, с одной стороны, определитель при этом не изменится, а, с другой стороны, по предыдущему свойству его знак поменяется на противоположный. Таким образом |A| = — |A| и, стало быть, |A| = 0. Если же в определителе имеются две пропорциональные строки (столбца), то после вынесения за его знак по свойству 2) общего множителя элементов строки (столбца), мы получим определитель с двумя одинаковыми строками (столбцами), который равен нулю.
6) Определитель не изменится, если к элементам какой-нибудь строки (столбца) добавить соответствующие элементы другой строки (столбца), умноженные на одно и тоже число.
Это следует из свойств 3) и 5), так как в этом случае полученный определитель можно представить в виде суммы двух определителей, один из которых равен исходному, а в другом имеются пропорциональные строки (столбцы), и поэтому он равен пулю.
Прежде чем сформулировать очередное свойство, введем понятие алгебраического дополнения к элементу матрицы.
Алгеброическим дополнением элемента aij квадратной матрицы A = (aij)nxn мы будем называть число
где  — определитель порядка n — 1, полученный из определителя этой матрицы вычеркиванием i-ой строки и j-го столбца.
— определитель порядка n — 1, полученный из определителя этой матрицы вычеркиванием i-ой строки и j-го столбца.
7) Разложение определителя по элементам строки (столбца).
Определитель матрицы равен сумме произведений элементов какой-нибудь строки (столбца) на соответствующие алгебраические дополнения. Таким образом,


Докажем, например, первую из этих формул. Убедимся в том, что правая часть данной формулы содержит все слагаемые определителя матрицы А. Выражение

содержит n(n — 1)! = n! различных произведений элементов определи теля матрицы A, взятых по одному из каждой строки и каждого столбца. Осталось проверить соответствие знаков.
Рассмотрим произвольное произведение

Каждое слагаемое определителя  представляет собой произведение элементов данной матрицы, взятых по одному из каждой строки и каждого столбца, исключая строку с номером i и столбец с номером j. Знак этого произведения определяется четностью перестановки
представляет собой произведение элементов данной матрицы, взятых по одному из каждой строки и каждого столбца, исключая строку с номером i и столбец с номером j. Знак этого произведения определяется четностью перестановки
чисел 1, 2, . , n — 1. Умножив данное произведение на число  и поставив множитель
и поставив множитель  на место с номером i, мы получим соответствующее произведение определителя матрицы А с перестановкой вторых индексов
на место с номером i, мы получим соответствующее произведение определителя матрицы А с перестановкой вторых индексов  и знаком
и знаком  который по лемме 2 пункта 1 соответствует четности перестановки
который по лемме 2 пункта 1 соответствует четности перестановки 
Таким образом, вычисление определителя n-го порядка сводится к вычислению n определителей (n-1)-го порядка.
Пример №4
Решение. Разложим этот определитель по элементам второй строки:

Пример №5
Вычислить определитель треугольной матрицы
Разлагая этот и следующие определители по первому столбцу, получим:

таким образом, определитель треугольной матрицы равен произведению диагональных элементов.
8) Сумма произведений n действительных чисел на алгебраические дополнения к элементам какой-нибудь строки (столбца) равна определителю, в котором в указанной строке (столбце) расположены данные числа, а все остальные элементы совпадают с соответствующими элементами исходного определителя.
Это свойство является прямым следствием предыдущего.
9) Сумма произведений элементов какой-нибудь строки (столбца) на алгебраические дополнения к элементам какой-нибудь другой строки (столбца) определителя равна нулю.
Действительно, по предыдущему свойству эта сумма произведений равна определителю с двумя совпадающими строками (столбцами), а такой определитель по свойству 5) равен нулю.
10) Определитель произведения матриц равен произведению определителей этих матриц, т. е.

Достаточно громоздкое доказательство этого свойства мы приводить не будем.
Обратная матрица
Определение: Обратной к квадратной матрице  называется обозначаемая через А-1 матрицы, для которой АА-1 = А-1А = Е, где Е — единичная матрица.
называется обозначаемая через А-1 матрицы, для которой АА-1 = А-1А = Е, где Е — единичная матрица.
Из этого определения следует, что матрица А-1 также является квадратной той же размерности, что и матрица А.
Отметим некоторые свойства обратной матрицы, следующие из ее определения.
а) У матрицы не может существовать больше одной обратной.
Действительно, пусть для матрицы А имеются две обратные  Тогда
Тогда

Умножив обе части первого равенства слева на матрицу  получим
получим 
c) Если для квадратных матриц А и В одного порядка существуют обратные, то и у матрицы АВ также существует обратная , причем

Выясним условия, при которых обратная матрица существует.
Теорема (критерий существования обратной матрицы). Для того, чтобы существовала матрица, обратная данной, необходимо и достаточно, чтобы данная матрица была невырожденной, то есть чтобы ее определитель был не равен нулю.
Доказательство. Докажем сначала необходимость условия теоремы. Пусть для матрицы А существует обратная матрица. Тогда из равенства АА-1 = E, воспользовавшись свойством 10) определителя произведения матриц, получаем: det(AA-1) = det А  det А-1 = det E = 1. Следователь но, det А
det А-1 = det E = 1. Следователь но, det А  0.
0.
Убедимся теперь в том, что условие теоремы является и достаточным. Предположим, что матрица А является невырожденной. Проверим, что обратной к данной является матрица со следующей структурой 1:
Действительно, если 

откуда, воспользовавшись свойствами 7) и 9) определителя (§2, пункт 3), заключаем:
т. е. АА-1 = Е. Аналогично убеждаем, что А-1А = Е. Теорема доказана.
В строках указанной ниже матрицы записаны алгебраические дополнения к элементам соответствующих столбцов.
Пример №6
Найти обратную к матрице
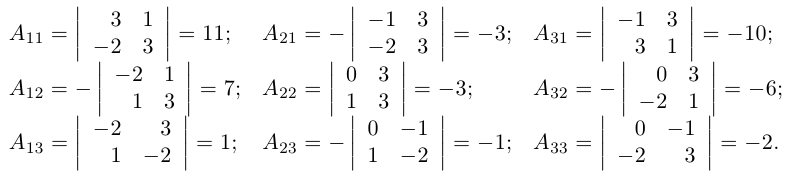
Решение. Найдем сначала определитель матрицы:  Обратная матрица существует. Находим алгебраические дополнения к элементам данной матрицы:
Обратная матрица существует. Находим алгебраические дополнения к элементам данной матрицы:
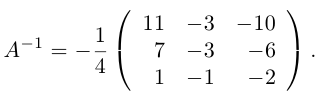
 Следовательно,
Следовательно,
Обратную матрицу можно использовать при решении линейных матричных уравнений. Пусть, например, требуется решить матричное уравнение
с известными матрицами А и B, причем матрица A является невырожденной. Умножая обе части данного матричного уравнения слева на обратную матрицу A-1, получим:
Аналогично, решением матричного уравнения XA = B является матрица X = BA-1, а решением матричного уравнения AXB = С с невырожденными матрицами A и B является матрица X = A-1CB-1.
Ранг матрицы и его вычисление
Рассмотрим произвольную матрицу 
Минором порядка k матрицы A называется определитель, стоящий на пересечении выбранных k строк и k столбцов данной матрицы.
Определение: Рангом матрицы А называется максимальный из порядков ненулевых миноров этой матрицы. Обозначается ранг через rang A.
Естественно считать, что rang O = 0. Очевидно также, что 
Пример №7
Найти ранг матрицы
Решение. Вычислим минор, находящийся на пересечении первых двух строк и первого и четвертого столбцов:
Все же миноры третьего порядка этой матрицы равны нулю, так как третья строка равна разности второй и первой строк. Следовательно, rang A = 2.
Как видно из определения, вычисление ранга матрицы через миноры является весьма трудоемкой задачей, особенно для матриц большой размерности. Значительно сократить объем вычислений позволяет другой метод, основанный на элементарных преобразованиях матрицы.
Элементарными преобразованиями матрицы называются следующие операции над ее строками или столбцами:
- перестановка двух строк (столбцов) матрицы;
- умножение строки (столбца) на ненулевое действительное число;
- добавление к строке (столбцу) другой строки (столбца), умноженной на действительное число.
Тот факт, что матрица В получена из матрицы А с помощью одного или нескольких последовательно выполненных элементарных преобразований, мы будем обе тачать как 
Теорема. Ранг матрицы не меняется при ее элементарных преобразованиях.
Доказательство этого утверждения для первого и второго элементарных преобразований следует из того, что по свойствам 2) и 4) определителя (§2, пункт 3) миноры исходной матрицы могут отличаться от миноров преобразованной разве лишь знаком или ненулевым множителем, что. естественно, не отражается на ранге матрицы. Пусть теперь матрица А’ получена из матрицы А с помощью третьего элементарного преобразования, для определенности будем считать, что к строке с номером i добавлена строка с номером j, умноженная на действительное число  Возьмем в матрице А’ минор М порядка
Возьмем в матрице А’ минор М порядка  (если такого минора нет, то rang
(если такого минора нет, то rang  ). Этот минор либо совпадает с минором матрицы A, либо по свойствам 3). 2). 4) определителя он равен сумме двух миноров матрицы А с действительными коэффициентами, один из которых равен 1. а второй
). Этот минор либо совпадает с минором матрицы A, либо по свойствам 3). 2). 4) определителя он равен сумме двух миноров матрицы А с действительными коэффициентами, один из которых равен 1. а второй  В обоих случаях по определению ранга матрицы минор М равен 0. Следовательно, rang А’ n.
В обоих случаях по определению ранга матрицы минор М равен 0. Следовательно, rang А’ n.
Следствие: Для того чтобы однородная система n уравнений с n неизвестными имела ненулевое решение, необходимо и достаточно, чтобы ее основной определитель был равен нулю.
Доказательство:
- Достаточность:
 система имеет нетривиальное решение. Так как единственный минор n -го порядка равен нулю, то r
система имеет нетривиальное решение. Так как единственный минор n -го порядка равен нулю, то rПри копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Матрицы. Виды матриц. Операции над матрицами и их свойства

Матрицы. Виды матриц. Операции над матрицами и их свойства.
Определитель матрицы n-го порядка. N, Z,Q, R,C,
Матрицей порядка m*n называется прямоугольная таблица из чисел, содержащая m-строк и n — столбцов.
Две матрицы называются равными, если число строк и столбцов одной из них равно соответственно числу строк и столбцов другой и соответст. эл-ты этих матриц равны.
Замечание: Эл-ты имеющие одинаковые индексы являются соответствующими.
-Квадратная матрица: матрица называется квадратной, если число её строк равно числу столбцов.
-Прямоугольная: матрица называется прямоугольной, если число строк не равно числу столбцов.
-Матрица строка: матрица порядка 1*n (m=1) имеет вид a11,a12,a13 и называется матрицей строки.
-Диагональная: диагональ квадратной матрицы, идущая от верхнего левого угла к правому нижнему углу, то есть состоящая из элементов а11,а22……-называется главной диагональю. (опред: квадратная матрица все элементы которой равны нулю, кроме тех, что расположены на главной диагонали, называется диагональной матрицей.
-Единичная: диагональная матрица называется единичной, если все элементы расположены на главной диагонали и равны 1.
-Верхняя треугольная: А=||aij|| называется верхней треугольной матрицей, если aij=0. При условии i>j.
-Нижняя треугольная: aij=0. i 1, то определитель этой матрицы – число.
Алгебраическим дополнением Aij эл-та aij матрицы А называется минор Mij, умноженный на число 
ТЕОРЕМА1: Определитель матрицы А равен сумме произведений всех элементов произвольной строки (столбца) на их алгебраические дополнения.
Основные свойства определителей.
1. Определитель матрицы не изменится при её транспонировании.
2. При перестановки двух строк (столбцов) определитель меняет знак, а абсолютная величина его не меняется.
3. Определитель матрицы, имеющий две одинаковые строки (столбцы) равен 0.
4.При умножении строки (столбца) матрицы на число её определитель умножается на это число.
5. Если одна из строк (столбцов) матрицы состоит из 0, то определитель этой матрицы равен 0.
6. Если все элементы i-ой строки (столбца) матрицы представлены в виде суммы двух слагаемых, то её определитель можно представить в виде суммы определителей двух матриц.
7. Определитель не изменится, если к элементам одного столбца (строки) прибавить соответственно эл-ты другого столбца (строки) предварительно умнож. на одно и того же число.
8.Сумма произвольных элементов какого либо столбца (строки) определителя на соответствующее алгебраическое дополнение элементов другого столбца (строки) равна 0.


Способы вычисления определителя:
1. По определению или теореме 1.
2. Приведение к треугольному виду.
Определение и свойства обратной матрицы. Вычисление обратной матрицы. Матричные уравнения.
Определение: Квадратная матрица порядка n, называется обратной к матрице А того же порядка и обозначается 
Для того чтобы для матрицы А существовала обратная матрица необходимо и достаточно, чтобы определитель матрицы А был отличен от 0.
Свойства обратной матрицы:
-1. Единственность: для данной матрицы А её обратная – единственная.
-2. определитель матрицы 
-3. Операция взятия транспонирования и взятие матрицы обратной.
Пусть А и В две квадратные матрицы того же порядка.


Понятие линейной зависимости и независимости столбцов матрицы. Свойства линейной зависимости и линейной независимости системы столбцов.
— Столбцы А1,А2…Аn называются линейно зависимыми, если существует их не тривиальная линейная комбинация, равная 0-му столбцу.
— Столбцы А1,А2…Аn называются линейно независимыми, если существует их не тривиальная линейная комбинация, равная 0-му столбцу.
Линейная комбинация называется тривиальной, если все коэффициенты С(l) равны 0 и не тривиальной в противном случае.

1. Система столбцов, состоящая из нулевого столбца – линейна зависима.

2.для того чтобы столбцы  были линейно зависимы необходимо и достаточно, чтобы какой-нибудь столбец являлся линейной комбинацией других столбцов.
были линейно зависимы необходимо и достаточно, чтобы какой-нибудь столбец являлся линейной комбинацией других столбцов.

Пусть 1 из столбцов 
 является линейной комбинацией других столбцов.
является линейной комбинацией других столбцов.

3. Если несколько столбцов среди столбцов :  линейно зависимы, то и все столбцы линейно зависимы.
линейно зависимы, то и все столбцы линейно зависимы.
4. Если система столбцов линейно независима, то любая её подсистема так же линейно независима.
(Всё что сказано относительно столбцов, справедливо и для строк).
Миноры матрицы. Базисные миноры. Ранг матрицы. Метод окаймляющих миноров вычисления ранга матрицы.
Минором порядка к матрицы А называется определитель элементы которого расположены на пересечении к-строк и к-стролбцов матрицы А.
Если все миноры к-го порядка матрицы А =0, то любой минор порядка к+1 тоже равен 0.
Базисным минором матрицы А называется минор наибольшего к-го порядка отличного от 0.
Рангом матрицы А называется порядок её базисного минора.
Метод окаймляющих миноров: — Выбираем не нулевой элемент матрицы А ( Если такого элемента не существует, то ранг А =0)
Окаймляем минор предыдущий 1-го порядка минором 2-го порядка. (Если этот минор не равен 0, то ранг >=2) Если ранг этого минора =0, то окаймляем выбранный минор 1-го порядка другими минорами 2-го порядка. (Если все миноры 2-го порядка =0, то ранг матрицы = 1).
Ранг матрицы. Способы нахождения ранга матрицы.
Рангом матрицы А называется порядок его базисного минора.[RgA]
1) Метод окаймляющих миноров: -Выбираем ненулевой элемент матрицы А (если такого элемента нет, то ранг =0) – Окаймляем минор предыдущий 1-го порядка минором 2-го порядка. (Если этот минор  , то r=RgA>=2). Если ранг этого минора = 0, то окаймляем выбранный минор 1-го порядка другим минором 2-го порядка. (Если все миноры второго порядка =0, то ранг =1). Повторяем эту процедуру до тех пор пока на этом шаге r Mr
, то r=RgA>=2). Если ранг этого минора = 0, то окаймляем выбранный минор 1-го порядка другим минором 2-го порядка. (Если все миноры второго порядка =0, то ранг =1). Повторяем эту процедуру до тех пор пока на этом шаге r Mr r+1 Mr+1=0.
r+1 Mr+1=0.
2)Приведение матрицы к ступенчатому виду: этот метод основан на элементарных преобразованиях. При элементарных преобразованиях ранг матрицы не меняется.
Элементарными преобразованиями называются следующие преобразования:
-перестановка двух строк (столбцов).
-Умножение всех элементов некоторого столбца (строки) на число не =0.
— прибавление ко всем элементам некоторого столбцы (строки) элементов другого столбца (строки), предварительно умноженных на одно и тоже число.
Теорема о базисном миноре. Необходимое и достаточное условие равенства нулю определителя.
Базисным минором матрицы А называется минор наибольшего к-го порядка отличного от 0.
Теорема о базисном миноре:
Базисные строки (столбцы) линейно независимы. Любая строка (столбец) матрицы А являются линейной комбинацией базисных строк (столбцов).
Замечания: Строки и столбцы на пересечении которых стоит базисный минор называются соответственно базисными строками и столбцами.
a11 a12… a1r a1j
ar1 ar2 ….arr arj
Необходимые и достаточные условия равенства нулю определителя:
Для того чтобы определитель n-го порядка =0, необходимо и достаточно, чтобы его строки (столбцы) были линейно зависимы.
Системы линейных уравнений, их классификация и формы записи. Правило Крамера.
Решением системы алгебраических уравнений называется такая совокупность n чисел C1,C2,C3……Cn, которая при подстановки в исходную систему на место x1,x2,x3…..xn обращает все уравнения системы в тождества.
Система линейных алгебраических уравнений называется совместной, если она имеет хотя бы одно решение.
Совместная система называется определённой, если она имеет единственное решение, и неопределённой, если она имеет бесчисленно много решений.
Рассмотрим систему 3-х линейных уравнений с тремя неизвестными:

Определитель третьего порядка, соответствующий матрице системы, т. е. составленный из коэффициентов при неизвестных,

называется определителем системы.
Составим ещё три определителя следующим образом: заменим в определителе D последовательно 1, 2 и 3 столбцы столбцом свободных членов

Тогда можно доказать следующий результат.
Теорема (правило Крамера). Если определитель системы Δ ≠ 0, то рассматриваемая система имеет одно и только одно решение, причём

Доказательство. Итак, рассмотрим систему 3-х уравнений с тремя неизвестными. Умножим 1-ое уравнение системы на алгебраическое дополнение A11 элемента a11, 2-ое уравнение – на A21 и 3-е – на A31:

Сложим эти уравнения:

Рассмотрим каждую из скобок и правую часть этого уравнения. По теореме о разложении определителя по элементам 1-го столбца
 .
.
Далее рассмотрим коэффициенты при x2:

Аналогично можно показать, что и  .
.
Наконец несложно заметить, что 
Таким образом, получаем равенство:  .
.
Следовательно,  .
.
Аналогично выводятся равенства  и
и  , откуда и следует утверждение теоремы.
, откуда и следует утверждение теоремы.
Системы линейных уравнений. Условие совместимости линейных уравнений. Теорема Кронекера-Капелли.
Решением системы алгебраических уравнений называется такая совокупность n чисел C1,C2,C3……Cn, которая при подстановки в исходную систему на место x1,x2,x3…..xn обращает все уравнения системы в тождества.
Система линейных алгебраических уравнений называется совместной, если она имеет хотя бы одно решение.
Совместная система называется определённой, если она имеет единственное решение, и неопределённой, если она имеет бесчисленно много решений.
Условия совместности систем линейных алгебраических уравнений.
a11 a12 ……a1n x1 b1
a21 a22 ……a2n x2 b2
am1 am2…..amn xn bn
ТЕОРЕМА: Для того чтобы система m линейных уравнений с n неизвестными была совместной необходимо и достаточно, чтобы ранг расширенной матрицы был равен рангу матрицы А.
Замечание: Эта теорема даёт лишь критерии существования решения, но не указывает способа отыскивания решения.
Системы линейных уравнений. Метод базисного минора — общий метод отыскивания всех решений систем линейных уравнений.

Метод базисного минора:
Пусть система совместна и RgA=RgA’=r. Пусть базисный минор расписан в верхнем левом углу матрицы А.


 …..
…..  x
x  d1
d1

 …..
…..  x
x  d2
d2

 …..
…..  x
x  dr
dr
d1 b1-a -…..-a
-…..-a

detA
Xi=
Замечания: Если ранг основной матрицы и рассматриваемой равен r=n, то в этом случае dj=bj и система имеет единственное решение.
Однородные системы линейных уравнений.
Система линейных алгебраических уравнений называется однородной, если все ее свободные члены равны нулю.

AX=0 – однородная система.
АХ =В – неоднородная система.
Однородные системы всегда совместны.
Однородные системы имеют неоднородные решения, когда ранг матрицы системы меньше числа неизвестных.
r SAS-1= (SS-1)B(SS-1)=B
В и одновременно В
Дано, что А=S1-1BS1, и В=S2-1CS2 => A= (S1-1 S2-1) C(S2 S1) = (S2 S1)-1C(S2 S1) = S3-1CS3, где S3 = S2S1
4)Определители подобных матриц равны.
В, надо доказать, что detA=detB.
A=S-1 BS, detA=det(S-1 BS)= detS-1* detB* detS = 1/detS *detB*detS (сокращаем) = detB.
5)Ранги подобных матриц совпадают.
Собственные векторы и собственные значения матриц.
Число λ называется собственным значением матрицы А, если существует ненулевой вектор Х(матр. столбец) такой, что АХ= λ Х, вектор Х называется собственным вектором матрицы А, а совокупность всех собственных значений называется спектром матрицы А.
Свойства собственных векторов.
1)При умножении собственного вектора на число получим собственный вектор с тем же собственным значением.
α Х => А(α Х) = α (АХ) = α(λ Х) = = λ (αХ)
2) Собственные векторы с попарно-различными собственными значениями линейно независимы λ1, λ2. λк.
Пусть система состоит из 1-ого вектора, сделаем индуктивный шаг:
С1 Х1 +С2 Х2 + .. +Сn Хn = 0 (1) – умножаем на А.
С1 АХ1 +С2 АХ2 + .. +Сn АХn = 0
С1 λ1 Х1 +С2 λ2 Х2 + .. +Сn λn Хn = 0
Умножаем на λn+1 и вычтем
С1 Х1 +С2 Х2 + .. +Сn Хn+ Сn+1 Хn+1 = 0
С1 λ1 Х1 +С2 λ2 Х2 + .. +Сn λn Хn+ Сn+1 λn+1 Хn+1 = 0
C1 (λ1 –λn+1 )X1 + C2 (λ2 –λn+1 )X2 +.. + Cn (λn –λn+1 )Xn + Cn+1 (λn+1 –λn+1 )Xn+1 = 0
C1 (λ1 –λn+1 )X1 + C2 (λ2 –λn+1 )X2 +.. + Cn (λn –λn+1 )Xn = 0
Надо чтобы С1 =С2 =… = Сn = 0
А-λЕ называется характеристической матрицей для матрицы А.
Для того, чтобы ненулевой вектор Х был собственным вектором матрицы А, соответствующий собственному значению λ необходимо чтобы он являлся решением однородной системы линейно-алгебраических уравнений (А — λЕ)Х = 0
Нетривиальное решение система имеет тогда, когда det (А — XЕ) = 0 — это характеристическое уравнение.
Характеристические уравнения подобных матриц совпадают.
det(S-1AS – λЕ) = det(S-1AS – λ S-1ЕS) =det(S-1 (A – λЕ)S) = det S-1 det(A – λЕ) detS= det(A – λЕ)
det(A – λЕ)- функция относительно параметра λ
det(A – λЕ) = (-1)n Xn +(-1)n-1(a11+a22+..+ann)λn-1+..+detA
Этот многочлен и называется характеристическим многочленом матрицы А.
1)Если матрицы А
В, то сумма их диагональных элементов совпадает.
2)Множество собственных значений подобных матриц совпадают.
Если характеристические уравнения матриц совпадают, то они необязательно подобны.



Приведение матрицы к диагональному виду.
Говорят, что А диагонализируема, если существует подобная ей диагональная матрица.
Если матрица А приводится к диагональному виду, то на главной диагонали матрицы расположено собственное значение матрицы А.
А =>
Det(Ag-λE) = (λ11 – λ)( λ22 – λ)…( λnn – λ)= 0
Для того чтобы матрица А порядка n была диагонализируема, необходимо, чтобы существовали линейно-независимые собственные вектора матрицы А.
Если все собственные значения матрица А различны, то она диагонализируема.
Алгоритм нахождения собственных векторов и собственных значений.
1)составляем характеристическое уравнение
2)находим корни уравнений
3)составляем систему уравнений для определения собственного вектора.
4)находим фундаментальную систему решений
x1,x2..xn-r, где r — ранг характеристической матрицы.
5)собственный вектор, собственные значения λi записываются в виде:
X = С1 Х1 +С2 Х2 + .. +Сn-r Хn-r, где С12 +С22 +… С2n ≠0
6)проверяем, может ли матрица быть приведена к диагональному виду.
Ag = S-1AS S= [x1, x2,…xn]
Базис прямой, плоскости, пространства.
Максимальное число линейно-независимых векторов называются базисом.
Базисом на прямой является любой ненулевой вектор.
Базисом на плоскости являются любые два некаллениарных вектора.
Базисом в пространстве является система любых трех некомпланарных векторов.
Коэффициент разложения вектора по некоторому базису называется компонентами или координатами вектора в данном базисе.


а1 , а2 , а3 – координаты.
1.Скаляром называется всякое действительное число.
Вектором называется направленный прямолинейный отрезок.
В векторной алгебре приходится рассматривать также и нулевой вектор. Нулевым вектором является точка (ō)
Направление нулевого вектора считается неопределенным.
В векторной алгебре два вектора называются равными, если они имеют одинаковые длины и одинаковые направления.
Два вектора считаются одинаково-направленными, если они расположены на одной прямой, или на параллельных прямых и направлены в одну сторону.
При параллельном переносе длина и направление векторов не изменяется, то есть точка, приложения вектора, это любая точка пространства.
Такие векторы называются свободными.
Модулем вектора называется его длина, то есть расстояние между А и В (│ │, │
│, │ │). Модуль вектора равен нулю, тогда, когда этот вектор нулевой (│ō│=0)
│). Модуль вектора равен нулю, тогда, когда этот вектор нулевой (│ō│=0)
Ортом данного вектора называется вектор, который направлен одинаково с данным вектором и имеет модуль, равный единице.
Равные вектора имеют равные орты.
5.Угол между двумя векторами.
Это меньшая часть площади, ограниченная двумя лучами, исходящими из одной точки и направленные одинаково с данными векторами.

Сложение векторов. Умножение вектора на число.
1)Сложение двух векторов

Суммой двух векторов является с(вектор), соединяющий начало а(вектор) с концом в(вектор), при условии, что начало второго совмещено с концом первого.
Рисунок* │ +  │≤│ │+│
│≤│ │+│  │
│
2)Умножение вектора на скаляр.
Произведением вектора и скаляра называют новый вектор, который имеет:
а) = произведения модуля умножаемого вектора на абсолютную величину скаляра.
б) направление одинаковое с умножаемым вектором, если скаляр положителен, и противоположное, если скаляр отрицателен.
λ а(вектор)=>│ λ │= │ λ │=│ λ ││ │
λō=ō ;0=0
Свойства линейных операций над векторами.
+ =+  2. Закон ассоциативности.
2. Закон ассоциативности.
+( + ) = (+) + )
) = (+) + )
3. Сложение с нулем.
4.Сложение с противоположным.
+(-1) =ō
5. (αβ) = α(β) = β(α)
α(+ )=α +α
(α+β) = α+β
8. 1=
Выражение вектора через его модуль и орт.
 – орт
– орт
= │ │ 
Максимальное число линейно-независимых векторов называются базисом.
Базисом на прямой является любой ненулевой вектор.
Базисом на плоскости являются любые два некаллениарных вектора.
Базисом в пространстве является система любых трех некомпланарных векторов.
Коэффициент разложения вектора по некоторому базису называется компонентами или координатами вектора в данном базисе.
а1 , а2 , а3 – координаты.
Линейная зависимость и независимость между векторами.
Если над ,
,  …
…  выполнить действие сложения и умножения на скаляр, то в результате любого числа таких действий получим:
выполнить действие сложения и умножения на скаляр, то в результате любого числа таких действий получим:
λ1  + λ2
+ λ2  +..+ λк Это линейная комбинация исходных векторов.
+..+ λк Это линейная комбинация исходных векторов.
Вектора , … называются линейно-зависимыми, если существует их нетривиальная линейная комбинация, равная ō.
λ1 + λ2 +..+ λк = 0
Вектора, … называются линейно-НЕзависимыми, если не существует их нетривиальная линейная комбинация.
Свойства линейно-зависимых и Независимых векторов:
1)система векторов, содержащая нулевой вектор линейно-зависима.
λ1 + λ2 +..+ λк +1ō= ō
2)для того, чтобы векторы , … были линейно-зависимыми, необходимо, чтобы какой-нибудь вектор являлся линейной комбинацией других векторов.
3)если часть векторов из системы а1(вектор), а2(вектор)… ак(вектор) линейно-зависимы, то и все вектора линейно-зависимы.
4)если все вектора , … линейно-Независимы, то любая подсистема этих векторов также линейно-НЕзависима.
Аффинная система координат
Фиксированная тройка некомпланарных векторов с общим началом в т. О называется аффинной системой координат, а т. О – началом этой системы координат.

 r1 , r2 , r3 – опр. вектор.
r1 , r2 , r3 – опр. вектор.
М( ,
,  ,
, )
)
Линейные операции в координатах.

+ = (а1 + в1 )  + (а2 + в2 )
+ (а2 + в2 )  + (а3 + в3 )
+ (а3 + в3 )
λ = (λа1 ) + (λа2 ) + (λа3 )
Метод системы координат
Теорема об однозначном разложении любого вектора по трем некомпланарным векторам, а также точки пространства определены тройками чисел(координат), благодаря этому становится возможным в векторной алгебре применять скалярные аналитические методы, заменяя вектор на тройку чисел.
Прямоугольная система координат.
Это аффинная система координат с ортонормированным базисом.
Базис ортонормирован, если:
1)вектора базиса попарно перпендикулярны.
2) их модули равны единице.
Два базиса: правый и левый.
Векторы называются каллениарными, если они параллельны одной прямой.
Нулевой вектор считается каллениарным любому вектору.
Вектора называются компланарными, если они параллельны одной плоскости.
1)нулевой вектор считается компланарным в любой системе компланарных между собой векторов.
2) компланарные вектора расположены в одной плоскости, если их начало поместить в одну точку.
3) два вектора всегда компланарны.
Скалярное произведение векторов. Его свойства и выражение в координатах. Геометрические приложения.
Скалярное произведение 2-х векторов – это число равное произведению векторов на косинус угла между ними.

Свойства скалярного произведения:
1. Комутативность 
2. 
3. (a;b)=0, тогда и только тогда, когда векторы ортоганальны или какой нибудь из векторов равен 0.
4. Дистрибутивность (αa+βb;c)=α(a;c)+β(b;c)
5. Выражение скалярного произведения a и b через их координаты




При выполнении условия ( ) , h, l=1,2,3
) , h, l=1,2,3



Векторное произведение векторов, его свойство и выражение в координатах. Геометрические приложения.
Векторным произведением 2-х векторов и называется третий вектор который удовлетворяет следующим уравнениям:
1. 
2. 
3.  – правая
– правая
Свойства векторного произведения:
1. 
2. 
3. 
4. Векторное произведение координатных ортов
-ортонормированый базис.
 ;
;  =1
=1




Часто для обозначения ортов ортонормированного базиса используются 3 символа 

Векторное произведение в координатной форме.

Если — это ортонормированный базис, то 

Смешанное произведение векторов, его свойства и выражение в координатах. Геометрические приложения.
Векторно-скалярное произведение 3-х векторов.
Это произведение, которое получается скалярным умножением векторного произведения 2-х векторов на 3-й вектор.
Смешаное произведение 3-х векторов образующих правую систему координат равно объёму паралепипеда построенного на этих векторах.
Прямая линия на плоскости. Взаимное расположение 2-х прямых. Расстояние от точки до прямой линии. Угол между двумя прямыми. Условие параллельности и перпендикулярности 2-х прямых.
1. Часный случай расположения 2-х прямых на плоскости.
1) — уравнение прямой параллельной оси ОХ
— уравнение прямой параллельной оси ОХ
2)  — уравнение прямой параллельной оси ОУ
— уравнение прямой параллельной оси ОУ
2. Взамное расположение 2-х прямых.
Теорема 1 Пусть относительно аффинной системы координат даны уравнения прямых




А) Тогда необходимое и достаточное условие когда они пересекаются имеет вид:

Б) Тогда необходимое и достаточное условие того что прямые паралельны является условие:
 ,
,
B) Тогда необходимым и достаточным условием того что прямые сливаются в одну является условие :

3. Расстояние от точки до прямой.
Теорема. Расстояние от точки  до прямой относительно декартовой системы координат :
до прямой относительно декартовой системы координат : 



4. Угол между двумя прямыми. Условие перпендикулярности.
Пусть 2 прямые заданы относительно декартовой системы координат общими уравнениями.




Если  , то прямые перпендикулярны.
, то прямые перпендикулярны.
Плоскость в пространстве. Условие комплонарности вектора и плоскости. Расстояние от точки до плоскости. Условие параллельности и перпендикулярности двух плоскостей.
1. Условие комплонарности вектора и плоскости.








2. Расстояние от точки до плоскости в декартовой системе координат.




3. Угол между 2-я плоскостями. Условие перпендикулярности.




Если  , то плоскости перпендикулярны.
, то плоскости перпендикулярны.
Прямая линя в пространстве. Различные виды уравнения прямой линии в пространстве.
1. Прямая линия – как линия пересечения 2-х плоскостей.
 – L
– L


2. Векторное уравнение прямой в пространстве.



3. Параметрическое уравнение прямой.



4. Каноническое уравнение прямое.



5. Уравнение прямой проходящей через 2 заданные точки.



Пряма в пространстве. Приведение общего уравнения прямой линии к каноническому. Угол между двумя прямыми. Усл параллельности и перпендикулярности. Кратчайшее расстояние между двумя прямыми.
Приведение общего вида к каноническому.
Общие уравнения прямой в координатной форме:



Чтобы преобразовать общее уравнение в каноническое нужно найти произвольную точку прямой и числа (l, m,n)
При этом направляющий вектор прямой может быть найден как векторное произведение векторов нормали к заданным плоскостям.
a[n1*n2]=  = il+jm+kn
= il+jm+kn
Угол между двумя прямыми. Усл параллельности и перпендикулярности
Возьмем в канонической форму две прямые



Усл параллельности 
Усл перпендикулярности 
Кратчайшее расстояние между двумя прямыми.
Кратчайшее расстояние d=|np[a1,a2]M1M2]|=|(a1,a2,M1M2)|/|[a1,a2]|
Линии Второго Порядка. Канонические уравнения линий второго порядка
Рассм. Общий вид алгебраического Ур-я второго порядка
Невырожденные кривые ( )
)




 0,\;\; \lambda_2=0″ width=»201″ height=»25″/>
0,\;\; \lambda_2=0″ width=»201″ height=»25″/>

Вырожденные кривые (Δ = 0)


Две пересекающиеся прямые


Две параллельные прямые




Эллипс. Вывод Канонического уравнения эллипса. Форма. Свойства
Эллипс – геометрическое место точек, для которых сумма расстояний от двух фиксированных расстояний, называемых фокусами есть данное число 2a, большее чем расстояние 2c между фокусами.

 рис2
рис2
Вывод уравнения эллипса.
Для вывода уравнения эллипса выберем систему координат Оху так, чтобы фокусы  и
и  лежали на оси Ох, а начало координат совпадало с серединой отрезка
лежали на оси Ох, а начало координат совпадало с серединой отрезка  . Тогда фокусы будут иметь следующие координаты:
. Тогда фокусы будут иметь следующие координаты:
 и
и  .
.
Пусть M(x, y) – произвольная точка. Тогда MF1+MF2=2a, т. е.






Так как a > с, то  . Положим
. Положим

Тогда последнее уравнение примет вид  или
или

Исследование формы эллипса и св-ва
y2/b2=1-x2/a2 =>±b/a умножить на корень из(a2-x2)
Рассм случай когда x>=0 y>=0
xx0/a2 — yy0/b2 = 1
парабола — геометрическое место точек, равноудаленное от точки, названной фокусом и данной прямой, названной директриссой

 — каноническое уравнение параболы
— каноническое уравнение параболы
ось симметрии параболы проходит через её фокус и перпендиукулярна директрисе
если вращать параболу получится эллиптический параболоид
все параболы подобны
вопрос 30. Исследование уравнения общего вида кривой второго порядка.
Тип кривой опр. при старших членах A1, B1, C1
1. AC=0 ->кривая параболического типа
A≠0 C=0 => Ax2+2Dx+2Ey+F=0
Если Е=0 => Ax2+2Dx+F=0
то x1=x2 — сливается в одну
x1≠x2 — прямые параллельны Оу
x1≠x2 и корни мнимые, не имеет геометричекого образа
С≠0 А=0 =>C1y12+2D1x1+2E1y1+F1=0
Вывод: кривая параболического типа это либо парабола, либо 2 параллельные прямые, или мнимые, или в одну сливаются.
2.AC>0 -> кривая эллиптического типа
Дополняя до полного квадрата исходное уравнение преобразуем к каноническому, тогда получим случаи
(x-x0)2/a2+(y-y0)2/b2=-1 — мнимый эллипс
(x-x0)2/a2-(y-y0)2/b2=0 — точка с координатой x0 y0
Вывод: кривая эл. типа ето либо эллипс, либо мнимый, либо точка
http://www.evkova.org/linejnaya-algebra
http://pandia.ru/text/78/365/1325.php