Метод исключения — сведение системы ДУ к одному уравнению
Частным случаем канонической системы дифференциальных уравнений является одно уравнение n-го порядка, разрешенное относительно старшей производной.
Введением новых функций
это уравнение заменяется нормальной системой уравнений
Можно утверждать и обратное, что, вообще говоря, нормальная система уравнений первого порядка
эквивалентна одному уравнению порядка . На этом основан один из методов интегрирования систем дифференциальных уравнений — метод исключения .
Проиллюстрируем этот метод на примере системы двух уравнений:
Здесь — постоянные коэффициенты, а и — заданные функции; и — искомые функции. Из первого уравнения системы (1) находим
Подставляя во второе уравнение системы вместо у правую часть (2), а вместо производную от правой части (2), получаем уравнение второго порядка относительно
где — постоянные. Отсюда находим . Подставив найденное выражение для и в (2), найдем .
Пример 1. Проинтегрировать систему уравнений
Решение. Из первого уравнения системы (3) находим , тогда
Подставляя (4) во второе уравнение системы (3), получаем линейное дифференциальное уравнение с постоянными коэффициентами второго порядка
Общее решение уравнения (5)
Находя производную по от (6), получаем
Общее решение системы (3):
Пример 2. Решить задачу Коши для системы
Решение. Из второго уравнения системы (7) находим
Подставляя (9) и (10) в первое уравнение системы (7), получаем уравнение , общее решение которого
Подставляя (11) в (9), найдем . Общее решение системы (7)
При начальных условиях (8) из (12) получим систему уравнений для определения
решая которую, найдем . Подставляя эти значения и в (12), получаем решение поставленной задачи Коши:
Пример 3. Решить систему уравнений
Решение. Из первого уравнения системы находим
Подставляя эти выражения для и во второе уравнение, получаем
Считая , из последнего уравнения имеем и после интегрирования получим . Теперь легко находим
Общее решение данной системы
Замечание. Не всякая система дифференциальных уравнений может быть сведена к одному уравнению более высокого порядка. Например,
не сводится к одному уравнению второго порядка. Ее общее решение .
VMath
Инструменты сайта
Основное
Навигация
Информация
Действия
Содержание
Системы линейных уравнений
Обозначим через $ \mathbb A_<> $ любое из множеств $ \mathbb Q_<>, \mathbb R_<> $ или $ \mathbb C_<> $.
Примеры систем уравнений над $ \mathbb R $.
Относительно числа $ m_<> $ уравнений не делается ни какого предположения: оно может быть меньше, больше или равно числу переменных $ n_<> $. Если $ m_<>>n $ то система называется переопределенной. Решением системы уравнений называется любой набор значений переменных $ x_1=\alpha_<1>,\dots, x_n = \alpha_n $, обращающий каждое из уравнений в истинное равенство. Система называется совместной если она имеет хотя бы одно решение и несовместной в противном случае.
Можно доказать (см. результаты ☟ НИЖЕ ), что все возможности для произвольной системы ограничиваются следующими вариантами:
1. система совместна и имеет единственное решение;
2. cистема совместна и имеет бесконечное множество решений;
3. cистема несовместна.
При этом все решения будут находиться в том же множестве $ \mathbb A_<> $, что и коэффициенты системы.
Матричная форма записи
Для системы линейных уравнений относительно переменных $ x_1,x_2,\dots,x_n $ $$ \left\< \begin
Исключение переменных (метод Гаусса)
метода достаточно проста.
Пример. Решить систему уравнений $$ \left\< \begin
Решение. Выразим из первого уравнения $ x_ <1>$ $$ x_1=\frac<3> <2>x_2+\frac<1> <2>x_3 + \frac<3> <2>$$ и подставим в оставшиеся уравнения $$ 4 \left(\frac<3> <2>x_2+\frac<1> <2>x_3 + \frac<3><2>\right) -3\,x_2-5\,x_3=6 \ <\color
Ответ. $ x_<1>=1/4, x_2=-5/8, x_3=-5/8 $.
Теперь осталось формализовать изложенную идею метода (сформулировав допустимые правила действия над уравнениями — те, что в принципе, очевидны из здравого смысла ), а также исследовать возможные последствия его применения к системам общего вида.
Исключение переменных
Элементарными преобразованиями системы л.у. называются преобразования следующих трех типов:
1. перестановка двух уравнений;
2. умножение обеих частей уравнения на любое отличное от нуля число;
3. прибавление к одному уравнению любого другого, умноженного на произвольное число: пара уравнений $$ \begin
Теорема. Любое элементарное преобразование системы л.у. переводит эту систему в ей эквивалентную, т.е. имеющую то же множество решений, что и исходная.
Задача. С помощью элементарных преобразований привести систему л.у. к наиболее простому виду: такому, из которого легко было бы установить множество решений.
Предположим, что первое уравнение системы содержит явно неизвестную $ x_ <1>$, т.е. $ a_<11>^<> \ne 0 $. Исключим эту неизвестную из всех оставшихся уравнений. С этой целью вычтем из второго уравнения первое, домноженное на $ a_<21>/a_<11>^<> $. Получим $$\left(a_<22>— \frac
Понятно, что процесс исключения может быть продолжен и далее. Теперь посмотрим, где он может прерваться. Может так случиться, что очередная, $ \ell_<> $-я подсистема имеет коэффициент $ a_<\ell \ell>^ <[\ell-1]>$ равным нулю, что не позволит алгоритму идти дальше — т.е. исключить переменную $ x_<\ell>^<> $ из оставшихся уравнений (в принципе, такое могло случиться уже на первом шаге, если бы коэффициент $ a_<11>^<> $ был бы равен нулю). Возможные варианты дальнейших действий:
1. если хотя бы один коэффициент при $ x_<\ell>^<> $ в одном из оставшихся уравнений отличен от нуля: $ a_
2. если при всех $ j\ge \ell^<> $ коэффициенты $ a_
Поскольку число переменных конечно, то алгоритм исключения должен завершиться за конечное число шагов. Чем он может завершиться? Окончательная система должна иметь вид: $$ \left\< \begin
Предположение . Мы будем считать, что каждое из первых $ <\mathfrak r>_<> $ уравнений системы содержит в своей левой части хотя бы одну переменную с ненулевым коэффициентом.
Процесс получения системы такого вида из исходной системы уравнений называется прямым ходом метода Гаусса.
Исторический комментарий о Гауссе ☞ ЗДЕСЬ.
Установление множества решений
Теорема. Если хотя бы одно из чисел $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>,\dots , b_
Для простоты мы будем иллюстрировать наши рассуждения на системах л.у. над $ \mathbb R_<> $, в этом же множестве искать решения. Каждое из преобразований метода Гаусса будем обозначать $ \to_<> $.
Пример. Решить систему л.у.
$$ \left\< \begin
Решение. $$ \ \to \ \left\< \begin
Ответ. Система несовместна.
Пусть теперь $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>=0,<>\dots, b_ Из последнего уравнения системы можно однозначно установить значение $ x_
Из последнего уравнения системы можно однозначно установить значение $ x_
Теорема. Если прямой ход метода Гаусса заканчивается треугольной системой, т.е. $ \mathfrak r = n_<> $ и $ b_<<\mathfrak r>+1>^<[<\mathfrak r>-1]>=0,<>\dots, b_
Пример. Решить систему л.у.
$$ \left\< \begin
Ответ. $ x_1=1,\, x_<2>=2,\, x_3=-2 $ .
Исследуем теперь случай $ <\mathfrak r>1) :  На основании предположения , в $ <\mathfrak r>$-м уравнении этой системы имеется хотя бы один ненулевой коэффициент в левой части, пусть $ a_ <<\mathfrak r><\mathfrak s>>^<[<\mathfrak r>-1]>\ne 0 $ — первый из них. Если $ <\mathfrak s>=n $, то из этого уравнения однозначно определится $ x_
На основании предположения , в $ <\mathfrak r>$-м уравнении этой системы имеется хотя бы один ненулевой коэффициент в левой части, пусть $ a_ <<\mathfrak r><\mathfrak s>>^<[<\mathfrak r>-1]>\ne 0 $ — первый из них. Если $ <\mathfrak s>=n $, то из этого уравнения однозначно определится $ x_
Теорема. Если прямой ход метода Гаусса заканчивается трапециевидной системой, т.е. $ \mathfrak r 2) матрицы $ A_<> $ (третьего порядка). Понятие определителя распространяется и на квадратные матрицы бóльших порядков; образно говоря, определитель — это функция элементов матрицы, отвечающая за единственность решения системы уравнений.
Дальнейший матричный анализ метода Гаусса ☞ ЗДЕСЬ.
Формулы Крамера
Рассмотрим систему линейных уравнений с квадратной матрицей $ A_<> $, т.е. такую, у которой число уравнений совпадает с числом неизвестных.
Теорема. Cистема
$$ \left\<\begin
Доказательство ☞ ЗДЕСЬ
Пример. Решить систему уравнений
$$ \left\<\begin
Решение. $$ x_1=\frac<\left|\begin
Решение системы линейных уравнений с квадратной матрицей $ A_<> $ является непрерывной функцией коэффициентов этой системы при условии, что $ \det A_<> \ne 0 $.
Кроме того, формулы Крамера начинают конкурировать по вычислительной эффективности с методом Гаусса в случае систем, зависящих от параметра. Подробнее ☞ ЗДЕСЬ.
Еще один способ решения системы основан на построении обратной матрицы: $$ AX= <\mathcal B>\quad \Rightarrow \quad X=A^<-1> <\mathcal B>\ . $$ Этот способ малоэффективен при фиксированных числовых $ A_<> $ и $ <\mathcal B>_<> $.
Найти достаточное условие существования общего решения систем уравнений:
$$ A_1 X = <\mathcal B>_1 \quad u \quad A_2 Y = <\mathcal B>_2 \ , $$ при квадратных матрицах $ A_1 $ и $ A_2 $ одинакового порядка.
Теорема Кронекера-Капелли
Матрица, получающаяся конкатенацией матрицы $ A_<> $ и столбца правых частей $ <\mathcal B>_<> $ $$ [ A| <\mathcal B>] = \left( \begin
Теорема [Кронекер, Капелли]. Система $ AX= <\mathcal B>$ совместна тогда и только тогда, когда ранг матрицы этой системы совпадает с рангом ее расширенной матрицы:
$$ \operatorname
Доказательство необходимости. Пусть существует решение $ x_1=\alpha_1,\dots,x_n=\alpha_n $ системы, тогда $$\alpha_1 A_<[1]>+\dots+\alpha_n A_<[n]>= <\mathcal B>\ ,$$ т.е. столбец $ <\mathcal B>$ линейно выражается через столбцы $ A_<[1]>,\dots,A_ <[n]>$. Но тогда $$ \operatorname
Доказательство достаточности проводится в следующем пункте. ♦
Пример. Исследовать совместность системы уравнений
Решение. В этом примере число уравнений совпадает с числом неизвестных. Это обстоятельство несколько облегчает рассуждения. Обратимся к замечанию из предыдущего пункта: система л.у. с числом уравнений, совпадающем с числом неизвестных, как правило, совместна. Тогда попробуем установить условия, обеспечивающие противоположное свойство — несовместность. Оно, фактически, единственно: за все отвечает определитель системы $ \det A_<> $. Если он отличен от нуля — система совместна. $$\det A = \left| \begin
Осталось исследовать критические случаи: $ <\color
При $ <\color
Ответ. Система несовместна при $ <\color
Система однородных уравнений
$$ \left\< \begin
Пример. Найти условие, при котором три точки плоскости с координатами $ (x_1,y_1), (x_2,y_2) $ и $ (x_3,y_<3>) $ лежат на одной прямой.
Решение. Будем искать уравнение прямой в виде $ ax+by+c=0 $ при неопределенных коэффициентах $ a,b,c_<> $. Если точки лежат на прямой, то получаем для определения этих коэффициентов систему линейных уравнений: $$ \left\< \begin
Доказать, что для совместности системы
$$ \left\< \begin
An elementary treatise on determinants
в следующей формулировке.
Теорема. Для того чтобы система $ n_<> $ неоднородных уравнений была совместна, необходимо и достаточно, чтобы порядок наибольшего отличного от нуля минора был одинаков в расширенной и нерасширенной матрице системы.
Додсон — один из самых знаменитых математиков мира. Назовите его псевдоним.
Ответ ☞ ЗДЕСЬ
Общее решение
Пусть выполнено условие теоремы Кронекера-Капелли: $ \operatorname
Пусть теперь $ \mathfrak
Пример. Исследовать совместность и найти общее решение системы уравнений:
Решение проведем двумя способами, соответствующими двум способам вычисления ранга матрицы. Вычисляем сначала ранг матрицы $ A $ по методу окаймляющих миноров: $$ |2| \ne 0,\quad \left| \begin
Ненулевой минор третьего порядка (базисный минор) находится в первой, второй и четвертых строках, что означает линейную независимость соответствующих уравнений. Третье уравнение линейно зависит от остальных, и может быть отброшено. Далее, указанный базисный минор образован коэффициентами при $ x_1,x_3 $ и $ x_4 $. Следовательно оставшиеся уравнения могут быть разрешены относительно этих переменных, т.е. они — зависимые, а $ x_2 $ и $ x_5 $ — основные. Использование формулы дает общее решение $$ \begin
Ответ. Общее решение системы: $ x_1=1/2 (x_2+x_5-1),\ x_3=3-4\,x_5,\ x_4=0 $.
Проанализируем теперь полученные общие формулы для общего решения. В этих формулах $ \beta_j $ представляет решение системы, получаемое при $ x_<\mathfrak
Вывод. Формула общего решения системы $ A X=\mathcal B $: $$ x_j=\beta_j + \gamma_
Теорема. Общее решение системы уравнений $ A X=\mathcal B $ представимо в виде суммы какого-то частного решения этой системы и общего решения соответствующей однородной системы $ A X=\mathbb O $.
Доказательство тривиально если система $ A X=\mathcal B $ имеет единственное решение. Если же решений бесконечно много, то выбрав какое-то одно частное $ X=X_1 $ мы получаем, что любое другое частное решение $ X=X_2 $ должно быть связано с первым соотношением $$ A(X_2-X_1)=\mathbb O , $$ т.е. разность частных решений неоднородной системы обязательно является решением однородной системы уравнений $ AX=\mathbb O $. ♦
Теперь посмотрим как можно описать общее решение однородной системы.
Система однородных уравнений
Система линейных уравнений называется однородной, если все коэффициенты правых частей равны нулю: $$ \left\< \begin
Задача ставится о поиске нетривиального решения. Оно не всегда существует. Так, к примеру, если матрица $ A_<> $ системы — квадратная и имеет ненулевой определитель, то, согласно теореме Крамера, нетривиальных решений у однородной системы нет. Теорема Кронекера-Капелли утверждает, что условие $ \det (A_<>) = 0 $ является и достаточным для существования нетривиального решения.
Теорема 1. Для того, чтобы система однородных уравнений с квадратной матрицей $ A_<> $ имела нетривиальное решение необходимо и достаточно, чтобы $ \det (A_<>) = 0 $.
Для произвольной (не обязательно квадратной) матрицы $ A_<> $ имеет место следующий общий результат.
Теорема 2. Если $ \operatorname
Теорема 3. Множество решений системы однородных уравнений образует линейное подпространство пространства $ \mathbb A^
Пусть матрица системы $ AX=\mathbb O $ квадратная и
$$ \operatorname
Теперь обсудим способы нахождения ФСР.
1. Первый из них получается из общего метода решения системы линейных уравнений, рассмотренного в предыдущем пункте. Так же, как и в том пункте, сделаем упрощающее обозначения предположение, что зависимыми переменными являются первые $ x_<1>,\dots,x_ <\mathfrak r>$, т.е. общее решение задается формулами $$ x_j=\gamma_
Оформим этот способ построения ФСР в теорему:
Теорема 4. Если система уравнений $ AX=\mathbb O $ имеет структуру матрицы $ A_<> $ вида:
$$ A = \left[ E_ <\mathfrak r>\mid P_ <\mathfrak r \times (n-\mathfrak r)>\right] \ , $$ то ее ФСР состоит из столбцов матрицы $$ \left[ \begin
Пример. Найти ФСР для системы уравнений
Решение. Приводим систему к трапециевидному виду: $$ \left\< \begin
2. Этот способ напоминает вычисление обратной матрицы методом приписывания единичной матрицы. Транспонируем матрицу $ A_<> $ системы и припишем к ней справа единичную матрицу порядка $ n_<> $: $$ \left[ A^ <\top>| E_n \right] = \left(\begin
Пример. Найти ФСР для системы уравнений
$$ \left\< \begin
$$ \left(\begin
3. Еще один способ построения ФСР основан на теореме Гамильтона-Кэли.
Теорема. Пусть матрица системы $ AX=\mathbb O $ квадратная и $ \operatorname
Пример. Найти ФСР для системы уравнений
Решение. Здесь $$ A= \left( \begin
Блок-схемы зависимости множества решений системы уравнений $ AX= \mathcal B $ от комбинации чисел $ n, \mathfrak r $ ☞ ЗДЕСЬ.
Геометрическая интерпретация
Геометрический смысл введенных определений поясним на примере $ \mathbb R^ <3>$. Уравнение $$ a_1x_1+a_2x_2+a_3x_3=b $$ — при фиксированных вещественных коэффициентах $ a_1,a_2,a_3 $ (хотя бы один из них считаем отличным от нуля) и $ b_<> $ — задает плоскость. Если, к примеру, $ a_1\ne 0 $, то из уравнения получаем выражение для $ x_ <1>$ как функции $ x_2,x_3 $: $$ x_1=\frac
Теорема. Общее решение системы уравнений $ A X=\mathcal B $ представимо в виде суммы какого-то частного решения этой системы и общего решения соответствующей однородной системы $ A X=\mathbb O $.
 Координаты произвольной точки плоскости $ a_1x_1+a_2x_2+a_3x_3=0 $ задаются соотношениями $$ \left( \begin
Координаты произвольной точки плоскости $ a_1x_1+a_2x_2+a_3x_3=0 $ задаются соотношениями $$ \left( \begin
Теперь рассмотрим систему из двух уравнений: $$ \left\<\begin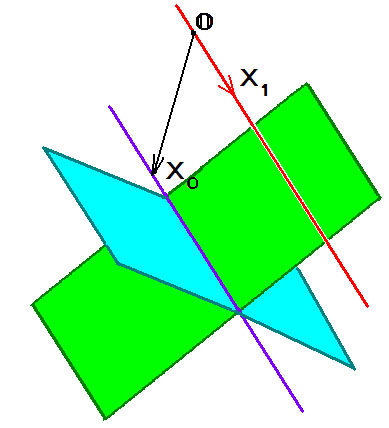 Очевидно, что любой из векторов $ X_ <1>$ или $ \tilde X_1 $ задает фундаментальную систему решений однородной системы уравнений 10) $$ \left\<\begin
Очевидно, что любой из векторов $ X_ <1>$ или $ \tilde X_1 $ задает фундаментальную систему решений однородной системы уравнений 10) $$ \left\<\begin
Мы рассмотрели пока только случай пересекающихся плоскостей в пространстве. Его можно считать общим, т.е. случаем «как правило»: две случайным образом выбранные плоскости в $ \mathbb R^ <3>$ пересекаться будут. Исследуем теперь исключительный случай — параллельности плоскостей. Исключительность этого случая может быть проверена и аналитикой. Для несовместности системы из двух уравнений необходимо, чтобы ранг ее матрицы $$ \left( \begin
Перейдем теперь к системе из трех уравнений: $$ \left\< \begin
Теорема Кронекера-Капелли в этом случае не нужна — нет, она остается справедливой! — но проверка условия на ранги матриц тривиальна: они оба равны $ 3_<> $. Если же указанный определитель обращается в нуль, то этот факт эквивалентен тому, что три строки определителя линейно зависимы. Например, возможно, что строка $ (a_<31>,a_<32>, a_<33>) $ может быть представлена в виде линейной комбинации первых двух строк. Вспомним геометрический смысл этих строк: они задают координаты векторов, перпендикулярных соответствующим плоскостям. Если система уравнений $$ \left\<\begin
Статья не закончена!
Ортогональность
Геометрические соображения из предыдущего пункта могут быть обобщены на случай когда размерности рассматриваемых пространств увеличиваются, и мы говорим о точках и векторах многомерных пространств. В последующих пунктах нам потребуются понятия линейной оболочки, линейного пространства, размерности, базиса и координат применительно к векторам-столбцам или векторам-строкам. Их можно найти ☞ ЗДЕСЬ.
Задача решения системы линейных уравнений $$ \left\< \begin
С другой стороны, к той же задаче решения системы уравнений, в предыдущем ПУНКТЕ мы подошли с другой стороны. Первое из уравнений системы $$ 3\,x_1+4\,x_2-x_3=2 $$ можно интерпретировать так: скалярное произведение векторов $ \vec<<\mathbf OA>^<[1]>> $ и $ \vec<<\mathbf OX>> $ равно фиксированному числу $ 2_<> $. Здесь вектора рассматриваются в пространстве строк $ \mathbb R_<>^ <3>$; считается, что каждый вектор имеет начало в начале координат $ \mathbf O=[0,0,0] $, а конец — в точке с координатами $ [3,4,-1] $ или, соответственно, $ [x_1,x_2,x_3] $. Если скалярное произведение векторов обозначать скобками $ \langle <> \mbox < >\rangle $, то систему уравнений можно переписать в виде $$ \langle \vec<<\mathbf OA>^<[1]>> ,\ \vec<<\mathbf OX>> \rangle=2,\ \langle \vec<<\mathbf OA>^<[2]>> ,\ \vec<<\mathbf OX>> \rangle=1 \quad npu \quad A^ <[1]>= [3,4,-1], A^<[2]>=[1,-2,3] $$ — строках матрицы $ A_<> $. И задачу решения такой системы понимать в смысле: найти координаты всех векторов-строк $ [x_1,x_2,x_3] $ которые обеспечат нам заданные значения скалярных произведений с двумя фиксированными векторами.
Геометрическая интерпретация еще более упрощается если рассмотреть случай однородной системы уравнений. Так, решить систему уравнений $$ \left\< \begin
Все эти геометрические соображения обобщаются в произвольное пространство $ \mathbb R_<>^
В терминах скалярного произведения, задачу решения системы линейных уравнений можно переформулировать как поиск строки $ X=[x_1,x_2,\dots,x_n] $, ортогональной всем строкам матрицы $ A_<> $: $$ \langle A^<[1]>,X \rangle=0, \langle A^<[2]>,X \rangle=0,\dots, \langle A^<[m]>,X \rangle=0 \ . $$ Множество таких строк образует линейное подпространство пространства $ \mathbb R_<>^
Теорема. $ \operatorname
Метода Гаусса: примеры решения СЛАУ
В данной статье мы:
- дадим определение методу Гаусса,
- разберем алгоритм действий при решении линейных уравнений, где количество уравнений совпадает c количеством неизвестных переменных, а определитель не равен нулю;
- разберем алгоритм действий при решении СЛАУ с прямоугольной или вырожденной матрицей.
Метод Гаусса — что это такое?
Метод Гаусса — это метод, который применяется при решении систем линейных алгебраических уравнений и имеет следующие преимущества:
- отсутствует необходимость проверять систему уравнений на совместность;
- есть возможность решать системы уравнений, где:
- количество определителей совпадает с количеством неизвестных переменных;
- количество определителей не совпадает с количеством неизвестных переменных;
- определитель равен нулю.
- результат выдается при сравнительно небольшом количестве вычислительных операций.
Основные определения и обозначения
Есть система из р линейных уравнений с n неизвестными ( p может быть равно n ):
a 11 x 1 + a 12 x 2 + . . . + a 1 n x n = b 1 a 21 x 1 + a 22 x 2 + . . . + a 2 n x n = b 2 ⋯ a p 1 x 1 + a p 2 x 2 + . . . + a p n x n = b p ,
где x 1 , x 2 , . . . . , x n — неизвестные переменные, a i j , i = 1 , 2 . . . , p , j = 1 , 2 . . . , n — числа (действительные или комплексные), b 1 , b 2 , . . . , b n — свободные члены.
Если b 1 = b 2 = . . . = b n = 0 , то такую систему линейных уравнений называют однородной, если наоборот — неоднородной.
Решение СЛАУ — совокупность значения неизвестных переменных x 1 = a 1 , x 2 = a 2 , . . . , x n = a n , при которых все уравнения системы становятся тождественными друг другу.
Совместная СЛАУ — система, для которой существует хотя бы один вариант решения. В противном случае она называется несовместной.
Определенная СЛАУ — это такая система, которая имеет единственное решение. В случае, если решений больше одного, то такая система будет называться неопределенной.
Координатный вид записи:
a 11 x 1 + a 12 x 2 + . . . + a 1 n x n = b 1 a 21 x 1 + a 22 x 2 + . . . + a 2 n x n = b 2 ⋯ a p 1 x 1 + a p 2 x 2 + . . . + a p n x n = b p
Матричный вид записи: A X = B , где
A = a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋯ ⋯ ⋯ ⋯ a p 1 a p 2 ⋯ a p n — основная матрица СЛАУ;
X = x 1 x 2 ⋮ x n — матрица-столбец неизвестных переменных;
B = b 1 b 2 ⋮ b n — матрица свободных членов.
Расширенная матрица — матрица, которая получается при добавлении в качестве ( n + 1 ) столбца матрицу-столбец свободных членов и имеет обозначение Т .
T = a 11 a 12 ⋮ a 1 n b 1 a 21 a 22 ⋮ a 2 n b 2 ⋮ ⋮ ⋮ ⋮ ⋮ a p 1 a p 2 ⋮ a p n b n
Вырожденная квадратная матрица А — матрица, определитель которой равняется нулю. Если определитель не равен нулю, то такая матрица, а потом называется невырожденной.
Описание алгоритма использования метода Гаусса для решения СЛАУ с равным количеством уравнений и неизвестных (обратный и прямой ход метода Гаусса)
Для начала разберемся с определениями прямого и обратного ходов метода Гаусса.
Прямой ход Гаусса — процесс последовательного исключения неизвестных.
Обратный ход Гаусса — процесс последовательного нахождения неизвестных от последнего уравнения к первому.
Алгоритм метода Гаусса:
Решаем систему из n линейных уравнений с n неизвестными переменными:
a 11 x 1 + a 12 x 2 + a 13 x 3 + . . . + a 1 n x n = b 1 a 21 x 1 + a 22 x 2 + a 23 x 3 + . . . + a 2 n x n = b 2 a 31 x 1 + a 32 x 2 + a 33 x 3 + . . . + a 3 n x n = b 3 ⋯ a n 1 x 1 + a n 2 x 2 + a n 3 x 3 + . . . + a n n x n = b n
Определитель матрицы не равен нулю.
- a 11 не равен нулю — всегда можно добиться этого перестановкой уравнений системы;
- исключаем переменную x 1 из всех уравнений систему, начиная со второго;
- прибавим ко второму уравнению системы первое, которое умножено на — a 21 a 11 , прибавим к третьему уравнению первое умноженное на — a 21 a 11 и т.д.
После проведенных действий матрица примет вид:
a 11 x 1 + a 12 x 2 + a 13 x 3 + . . . + a 1 n x n = b 1 a ( 1 ) 22 x 2 + a ( 1 ) 23 x 3 + . . . + a ( 1 ) 2 n x n = b ( 1 ) 2 a ( 1 ) 32 x 2 + a ( 1 ) 33 x 3 + . . . + a ( 1 ) 3 n x n = b ( 1 ) 3 ⋯ a ( 1 ) n 2 x 2 + a ( 1 ) n 3 x 3 + . . . + a ( 1 ) n n x n = b ( 1 ) n ,
где a i j ( 1 ) = a i j + a 1 j ( — a i 1 a 11 ) , i = 2 , 3 , . . . , n , j = 2 , 3 , . . . , n , b i ( 1 ) = b i + b 1 ( — a i 1 a 11 ) , i = 2 , 3 , . . . , n .
Далее производим аналогичные действия с выделенной частью системы:
a 11 x 1 + a 12 x 2 + a 13 x 3 + . . . + a 1 n x n = b 1 a ( 1 ) 22 x 2 + a ( 1 ) 23 x 3 + . . . + a ( 1 ) 2 n x n = b ( 1 ) 2 a ( 1 ) 32 x 2 + a ( 1 ) 33 x 3 + . . . + a ( 1 ) 3 n x n = b ( 1 ) 3 ⋯ a ( 1 ) n 2 x 2 + a ( 1 ) n 3 x 3 + . . . + a ( 1 ) n n x n = b ( 1 ) n
Считается, что a 22 ( 1 ) не равна нулю. Таким образом, приступаем к исключению неизвестной переменной x 2 из всех уравнений, начиная с третьего:
- к третьему уравнению систему прибавляем второе, которое умножено на — a ( 1 ) 42 a ( 1 ) 22 ;
- к четвертому прибавляем второе, которое умножено на — a ( 1 ) 42 a ( 1 ) 22 и т.д.
После таких манипуляций СЛАУ имеет следующий вид:
a 11 x 1 + a 12 x 2 + a 13 x 3 + . . . + a 1 n x n = b 1 a ( 1 ) 22 x 2 + a ( 1 ) 23 x 3 + . . . + a ( 1 ) 2 n x n = b ( 1 ) 2 a ( 2 ) 33 x 3 + . . . + a ( 2 ) 3 n x n = b ( 2 ) 3 ⋯ a ( 2 ) n 3 x 3 + . . . + a ( 2 ) n n x n = b ( 2 ) n ,
где a i j ( 2 ) = a ( 1 ) i j + a 2 j ( — a ( 1 ) i 2 a ( 1 ) 22 ) , i = 3 , 4 , . . . , n , j = 3 , 4 , . . . , n , b i ( 2 ) = b ( 1 ) i + b ( 1 ) 2 ( — a ( 1 ) i 2 a ( 1 ) 22 ) , i = 3 , 4 , . . . , n . .
Таким образом, переменная x 2 исключена из всех уравнений, начиная с третьего.
Далее приступаем к исключению неизвестной x 3 , действуя по аналоги с предыдущим образцом:
a 11 x 1 + a 12 x 2 + a 13 x 3 + . . . + a 1 n x n = b 1 a ( 1 ) 22 x 2 + a ( 1 ) 23 x 3 + . . . + a ( 1 ) 2 n x n = b ( 1 ) 2 a ( 2 ) 33 x 3 + . . . + a ( 2 ) 3 n x n = b ( 2 ) 3 ⋯ a ( n — 1 ) n n x n = b ( n — 1 ) n
После того как система приняла такой вид, можно начать обратный ход метода Гаусса:
- вычисляем x n из последнего уравнения как x n = b n ( n — 1 ) a n n ( n — 1 ) ;
- с помощью полученного x n находим x n — 1 из предпоследнего уравнения и т.д., находим x 1 из первого уравнения.
Найти решение системы уравнений методом Гаусса:
3 x 1 + 2 x 2 + x 3 + x 4 = — 2 x 1 — x 2 + 4 x 3 — x 4 = — 1 — 2 x 1 — 2 x 2 — 3 x 3 + x 4 = 9 x 1 + 5 x 2 — x 3 + 2 x 4 = 4
Коэффициент a 11 отличен от нуля, поэтому приступаем к прямому ходу решения, т.е. к исключению переменной x 11 из всех уравнений системы, кроме первого. Для того, чтобы это сделать, прибавляем к левой и правой частям 2-го, 3-го и 4-го уравнений левую и правую часть первого, которая умножена на — a 21 a 11 :
— 1 3 , — а 31 а 11 = — — 2 3 = 2 3 и — а 41 а 11 = — 1 3 .
3 x 1 + 2 x 2 + x 3 + x 4 = — 2 x 1 — x 2 + 4 x 3 — x 4 = — 1 — 2 x 1 — 2 x 2 — 3 x 3 + x 4 = 9 x 1 + 5 x 2 — x 3 + 2 x 4 = 4 ⇔
⇔ 3 x 1 + 2 x 2 + x 3 + x 4 = — 2 x 1 — x 2 + 4 x 3 — x 4 + ( — 1 3 ) ( 3 x 1 + 2 x 2 + x 3 + x 4 ) = — 1 + ( — 1 3 ) ( — 2 ) — 2 x 1 — 2 x 2 — 3 x 3 + x 4 + 2 3 ( 3 x 1 + 2 x 2 + x 3 + x 4 ) = 9 + 2 3 ( — 2 ) x 1 + 5 x 2 — x 3 + 2 x 4 + ( — 1 3 ) ( 3 x 1 + 2 x 2 + x 3 + x 4 ) = 4 + ( — 1 3 ) ( — 2 ) ⇔
⇔ 3 x 1 + 2 x 2 + x 3 + x 4 = — 2 — 5 3 x 2 + 11 3 x 3 — 4 3 x 4 = — 1 3 — 2 3 x 2 — 7 3 x 3 + 5 3 x 4 = 23 3 13 3 x 2 — 4 3 x 3 + 5 3 x 4 = 14 3
Мы исключили неизвестную переменную x 1 , теперь приступаем к исключению переменной x 2 :
— a 32 ( 1 ) a 22 ( 1 ) = — — 2 3 — 5 3 = — 2 5 и а 42 ( 1 ) а 22 ( 1 ) = — 13 3 — 5 3 = 13 5 :
3 x 1 + 2 x 2 + x 3 + x 4 = — 2 — 5 3 x 2 + 11 3 x 3 — 4 3 x 4 = — 1 3 — 2 3 x 2 — 7 3 x 3 + 5 3 x 4 = 23 3 13 3 x 2 — 4 3 x 3 + 5 3 x 4 = 14 3 ⇔
⇔ 3 x 1 + 2 x 2 + x 3 + x 4 = — 2 — 5 3 x 2 + 11 3 x 3 — 4 3 x 4 = — 1 3 — 2 3 x 2 — 7 3 x 3 + 5 3 x 4 + ( — 2 5 ) ( — 5 3 x 2 + 11 3 x 3 — 4 3 x 4 ) = 23 3 + ( — 2 5 ) ( — 1 3 ) 13 3 x 2 — 4 3 x 3 + 5 3 x 4 + 13 5 ( — 5 3 x 2 + 11 3 x 3 — 4 3 x 4 ) = 14 3 + 13 5 ( — 1 3 ) ⇔
⇔ 3 x 1 + 2 x 2 + x 3 + x 4 = — 2 — 5 3 x 2 + 11 3 x 3 — 4 3 x 4 = — 1 3 — 19 5 x 3 + 11 5 x 4 = 39 5 41 5 x 3 — 9 5 x 4 = 19 5
Для того чтобы завершить прямой ход метода Гаусса, необходимо исключить x 3 из последнего уравнения системы — а 43 ( 2 ) а 33 ( 2 ) = — 41 5 — 19 5 = 41 19 :
3 x 1 + 2 x 2 + x 3 + x 4 = — 2 — 5 3 x 2 + 11 3 x 3 — 4 3 x 4 = — 1 3 — 19 5 x 3 + 11 5 x 4 = 39 5 41 5 x 3 — 9 5 x 4 = 19 5 ⇔
3 x 1 + 2 x 2 + x 3 + x 4 = — 2 — 5 3 x 2 + 11 3 x 3 — 4 3 x 4 = — 1 3 — 19 5 x 3 + 11 5 x 4 = 39 5 41 5 x 3 — 9 5 x 4 + 41 19 ( — 19 5 x 3 + 11 5 x 4 ) = 19 5 + 41 19 39 5 ⇔
⇔ 3 x 1 + 2 x 2 + x 3 + x 4 = — 2 — 5 3 x 2 + 11 3 x 3 — 4 3 x 4 = — 1 3 — 19 5 x 3 + 11 5 x 4 = 39 5 56 19 x 4 = 392 19
Обратный ход метода Гаусса:
- из последнего уравнения имеем: x 4 = 392 19 56 19 = 7 ;
- из 3-го уравнения получаем: x 3 = — 5 19 ( 39 5 — 11 5 x 4 ) = — 5 19 ( 39 5 — 11 5 × 7 ) = 38 19 = 2 ;
- из 2-го: x 2 = — 3 5 ( — 1 3 — 11 3 x 4 + 4 3 x 4 ) = — 3 5 ( — 1 3 — 11 3 × 2 + 4 3 × 7 ) = — 1 ;
- из 1-го: x 1 = 1 3 ( — 2 — 2 x 2 — x 3 — x 4 ) = — 2 — 2 × ( — 1 ) — 2 — 7 3 = — 9 3 = — 3 .
Ответ: x 1 = — 3 ; x 2 = — 1 ; x 3 = 2 ; x 4 = 7
Найти решение этого же примера методом Гаусса в матричной форме записи:
3 x 1 + 2 x 2 + x 3 + x 4 = — 2 x 1 — x 2 + 4 x 3 — x 4 = — 1 — 2 x 1 — 2 x 2 — 3 x 3 + x 4 = 9 x 1 + 5 x 2 — x 3 + 2 x 4 = 4
Расширенная матрица системы представлена в виде:
x 1 x 2 x 3 x 4 3 2 1 1 1 — 1 4 — 1 — 2 — 2 — 3 1 1 5 — 1 2 — 2 — 1 9 4
Прямой ход метода Гаусса в данном случае предполагает приведение расширенной матрицы к трапецеидальному виду при помощи элементарных преобразований. Этот процесс очень поход на процесс исключения неизвестных переменных в координатном виде.
Преобразование матрицы начинается с превращения всех элементов нулевые. Для этого к элементам 2-ой, 3-ей и 4-ой строк прибавляем соответствующие элементы 1-ой строки, которые умножены на — a 21 a 11 = — 1 3 , — a 31 a 11 = — — 2 3 = 2 3 и н а — а 41 а 11 = — 1 3 .
Дальнейшие преобразования происходит по такой схеме: все элементы во 2-ом столбце, начиная с 3-ей строки, становятся нулевыми. Такой процесс соответствует процессу исключения переменной . Для того, чтобы выполнить этой действие, необходимо к элементам 3-ей и 4-ой строк прибавить соответствующие элементы 1-ой строки матрицы, которая умножена на — а 32 ( 1 ) а 22 ( 1 ) = — 2 3 — 5 3 = — 2 5 и — а 42 ( 1 ) а 22 ( 1 ) = — 13 3 — 5 3 = 13 5 :
x 1 x 2 x 3 x 4 3 2 1 1 | — 2 0 — 5 3 11 3 — 4 3 | — 1 3 0 — 2 3 — 7 3 5 3 | 23 3 0 13 3 — 4 3 5 3 | 14 3
x 1 x 2 x 3 x 4
3 2 1 1 | — 2 0 — 5 3 11 3 — 4 3 | — 1 3 0 — 2 3 + ( — 2 5 ) ( — 5 3 ) — 7 3 + ( — 2 5 ) 11 3 5 3 + ( — 2 5 ) ( — 4 3 ) | 23 3 + ( — 2 5 ) ( — 1 3 ) 0 13 3 + 13 5 ( — 5 3 ) — 4 3 + 13 5 × 11 3 5 3 + 13 5 ( — 4 3 ) | 14 3 + 13 5 ( — 1 3 )
x 1 x 2 x 3 x 4
3 2 1 1 | — 2 0 — 5 3 11 3 — 4 3 | — 1 3 0 0 — 19 5 11 5 | 39 5 0 0 41 5 — 9 5 | 19 5
Теперь исключаем переменную x 3 из последнего уравнения — прибавляем к элементам последней строки матрицы соответствующие элементы последней строки, которая умножена на а 43 ( 2 ) а 33 ( 2 ) = — 41 5 — 19 5 = 41 19 .
x 1 x 2 x 3 x 4 3 2 1 1 | — 2 0 — 5 3 11 3 — 4 3 | — 1 3 0 0 — 19 5 11 5 | 39 5 0 0 41 5 — 9 5 | 19 5
x 1 x 2 x 3 x 4
3 2 1 1 | — 2 0 — 5 3 11 3 — 4 3 | — 1 3 0 0 — 19 5 11 5 | 39 5 0 0 41 5 + 41 19 ( — 19 5 ) — 9 5 + 41 19 × 11 5 | 19 5 + 41 19 × 39 5
x 1 x 2 x 3 x 4
3 2 1 1 | — 2 0 — 5 3 11 3 — 4 3 | — 1 3 0 0 — 19 5 11 5 | 39 5 0 0 0 56 19 | 392 19
Теперь применим обратных ход метода. В матричной форме записи такое преобразование матрицы, чтобы матрица, которая отмечена цветом на изображении:
x 1 x 2 x 3 x 4 3 2 1 1 | — 2 0 — 5 3 11 3 — 4 3 | — 1 3 0 0 — 19 5 11 5 | 39 5 0 0 0 56 19 | 392 19
стала диагональной, т.е. приняла следующий вид:
x 1 x 2 x 3 x 4 3 0 0 0 | а 1 0 — 5 3 0 0 | а 2 0 0 — 19 5 0 | а 3 0 0 0 56 19 | 392 19 , где а 1 , а 2 , а 3 — некоторые числа.
Такие преобразования выступают аналогом прямому ходу, только преобразования выполняются не от 1-ой строки уравнения, а от последней. Прибавляем к элементам 3-ей, 2-ой и 1-ой строк соответствующие элементы последней строки, которая умножена на
— 11 5 56 19 = — 209 280 , н а — — 4 3 56 19 = 19 42 и н а — 1 56 19 = 19 56 .
x 1 x 2 x 3 x 4 3 2 1 1 | — 2 0 — 5 3 11 3 — 4 3 | — 1 3 0 0 — 19 5 11 5 | 39 5 0 0 0 56 19 | 392 19
x 1 x 2 x 3 x 4
3 2 1 1 + ( — 19 56 ) 56 19 | — 2 + ( — 19 56 ) 392 19 0 — 5 3 11 3 — 4 3 + 19 42 × 56 19 | — 1 3 + 19 42 × 392 19 0 0 — 19 5 11 5 + ( — 209 280 ) 56 19 | 39 5 + ( — 209 280 ) 392 19 0 0 0 56 19 | 392 19
x 1 x 2 x 3 x 4
3 2 1 0 | — 9 0 — 5 3 11 3 0 | 9 0 0 — 19 5 0 | — 38 5 0 0 0 56 19 | 392 19
Далее прибавляем к элементам 2-ой и 1-ой строк соответствующие элементы 3-ей строки, которые умножены на
— 11 3 — 19 5 = 55 57 и н а — 1 — 19 5 = 5 19 .
x 1 x 2 x 3 x 4 3 2 1 0 | — 9 0 — 5 3 11 3 0 | 9 0 0 — 19 5 0 | — 38 5 0 0 0 56 19 | 392 19
x 1 x 2 x 3 x 4
3 2 1 + 5 19 ( — 19 5 ) 0 | — 9 + 5 19 ( — 38 5 ) 0 — 5 3 11 3 + 55 57 ( — 19 5 ) 0 | 9 + 55 57 ( — 38 5 ) 0 0 — 19 5 0 | — 38 5 0 0 0 56 19 | 392 19
x 1 x 2 x 3 x 4
3 2 1 0 | — 11 0 — 5 3 0 0 | 5 3 0 0 — 19 5 0 | — 38 5 0 0 0 56 19 | 392 19
На последнем этапе прибавляем элементы 2-ой строки к соответствующим элементам 1-ой строки, которые умножены на — 2 — 5 3 = 6 5 .
x 1 x 2 x 3 x 4 3 2 1 0 | — 11 0 — 5 3 0 0 | 5 3 0 0 — 19 5 0 | — 38 5 0 0 0 56 19 | 392 19
x 1 x 2 x 3 x 4
3 2 + 6 5 ( — 5 3 ) 0 0 | — 11 + 6 5 × 5 3 ) 0 — 5 3 0 0 | 5 3 0 0 — 19 5 0 | — 38 5 0 0 0 56 19 | 392 19
x 1 x 2 x 3 x 4
3 0 0 0 | — 9 0 — 5 3 0 0 | 5 3 0 0 — 19 5 0 | — 38 5 0 0 0 56 19 | 392 19
Полученная матрица соответствует системе уравнений
3 x 1 = — 9 — 5 3 x 2 = 5 3 — 19 5 x 3 = — 38 5 56 19 x 4 = 392 19 , откуда находим неизвестные переменные.
Ответ: x 1 = — 3 , x 2 = — 1 , x 3 = 2 , x 4 = 7 .
Описание алгоритма использования метода Гаусса для решения СЛАУ с несовпадающим количеством уравнений и неизвестных, или с вырожденной системой матрицы
Если основная матрица квадратная или прямоугольная, то системы уравнений могут иметь единственное решение, могут не иметь решений, а могут иметь бесконечное множество решений.
Из данного раздела мы узнаем, как с помощью метода Гаусса определить совместность или несовместность СЛАУ, а также, в случае совместности, определить количество решений для системы.
В принципе, метод исключения неизвестных при таких СЛАУ остается таким же, однако есть несколько моментов, на которых необходимо заострить внимание.
На некоторых этапах исключения неизвестных, некоторые уравнения обращаются в тождества 0=0. В таком случае, уравнения можно смело убрать из системы и продолжить прямой ход метода Гаусса.
Если мы исключаем из 2-го и 3-го уравнения x 1 , то ситуация оказывается следующей:
x 1 + 2 x 2 — x 3 + 3 x 4 = 7 2 x 1 + 4 x 2 — 2 x 3 + 6 x 4 = 14 x — x + 3 x + x = — 1 ⇔
x 1 + 2 x 2 — x 3 + 3 x 4 = 7 2 x 1 + 4 x 2 — 2 x 3 + 6 x 4 + ( — 2 ) ( x 1 + 2 x 2 — x 3 + 3 x 4 ) = 14 + ( — 2 ) × 7 x — x + 3 x + x + ( — 1 ) ( x 1 + 2 x 2 — x 3 + 3 x 4 ) = — 1 + ( — 1 ) × 7 ⇔
⇔ x 1 + 2 x 2 — x 3 + 3 x 4 = 7 0 = 0 — 3 x 2 + 4 x 3 — 2 x 4 = — 8
Из этого следует, что 2-ое уравнение можно смело удалять из системы и продолжать решение.
Если мы проводим прямой ход метода Гаусса, то одно или несколько уравнений может принять вид — некоторое число, которое отлично от нуля.
Это свидетельствует о том, что уравнение, обратившееся в равенство 0 = λ , не может обратиться в равенство ни при каких любых значениях переменных. Проще говоря, такая система несовместна (не имеет решения).
- В случае если при проведении прямого хода метода Гаусса одно или несколько уравнений принимают вид 0 = λ , где λ — некоторое число, которое отлично от нуля, то система несовместна.
- Если же в конце прямого хода метода Гаусса получается система, число уравнений которой совпадает с количеством неизвестных, то такая система совместна и определена: имеет единственное решение, которое вычисляется обратным ходом метода Гаусса.
- Если при завершении прямого хода метода Гаусса число уравнений в системе оказывается меньше количества неизвестных, то такая система совместна и имеет бесконечно количество решений, которые вычисляются при обратном ходе метода Гаусса.
http://vmath.ru/vf5/algebra2/linearsystems
http://zaochnik.com/spravochnik/matematika/issledovanie-slau/metod-gaussa/