Определители второго и третьего порядков и их свойства с примерами решения
Содержание:
Определители второго порядка:
Под определителем (детерминантом) второго порядка понимается выражение

Числа 
Формула (1) дает правило «развертывания» определителя второго порядка, а именно: определитель второго порядка равен разности произведений его элементов первой и второй диагоналей.
Определители второго порядка
С помощью определителей второго порядка удобно решать линейные системы двух уравнений с двумя неизвестными:

Такую линейную систему, в которой свободные члены находятся в правых частях, для определенности мы будем называть стандартной.
Под решением системы (2) понимается всякая пара чисел (х, у), обращающая эту систему в тождество. Если существует только одна такая пара, то решение называется единственным. Аналогично вводится понятие решения для системы, содержащей п неизвестных  .
.
Для нахождения решений системы (2) применим метод исключения. Умножая первое уравнение системы (2) на  , а второе — на —
, а второе — на —  и складывая, будем иметь
и складывая, будем иметь

Аналогично, умножая первое уравнение системы (2) на а2 второе — на  складывая, получаем
складывая, получаем

Введем определитель системы
а также дополнительные определители
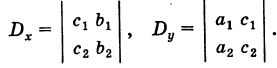
Заметим, что дополнительные определители Dx и Dy получаются из определителя системы D путем замены коэффициентов при указанном неизвестном на соответствующие свободные члены.
Уравнения (3) и (4) принимают вид

Если  , то отсюда получаем, что система (2) имеет единственное решение
, то отсюда получаем, что система (2) имеет единственное решение

Замечание. Если определитель D = 0, то система (2) или не имеет решений (т. е. несовместна), или имеет бесконечно много решений (т. е. система неопределенная).
Пример:

Решение:
Имеем 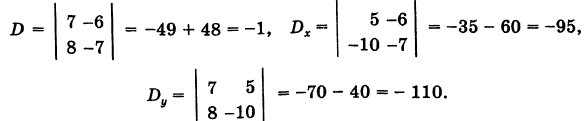
Отсюда на основании формул Крамера (6) получаем
 Геометрически решение (95; 110) представляет собой точку пересечения прямых (7).
Геометрически решение (95; 110) представляет собой точку пересечения прямых (7).
Система двух однородных уравнений с тремя неизвестными
Рассмотрим однородную систему

Эта система всегда совместна, так как, очевидно, имеет нулевое решение х = 0, у = 0, z = 0. Однако интересно найти не н у л е в ы е решения (х, у, z) системы (1). Пусть, например,  .
.
Тогда систему (1) можно переписать в виде
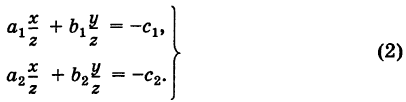 Отсюда, предполагая, что
Отсюда, предполагая, что  , получаем
, получаем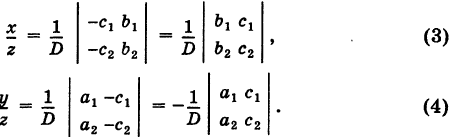
Введем в рассмотрение матрицу коэффициентов системы (1)
Определители второго порядка  , которые получаются из матрицы (5) путем вычеркивания соответствующего столбца, называются ее минорами. Таким образом, имеем
, которые получаются из матрицы (5) путем вычеркивания соответствующего столбца, называются ее минорами. Таким образом, имеем 
Используя эти обозначения, уравнения (3) и (4) можно переписать в следующем виде:

Равенства (6), очевидно, справедливы также и для нулевого решения.
Таким образом, имеем следующее правило: неизвестные однородной системы (1) пропорциональны соответствующим минорам ее матрицы коэффициентов, взятым с надлежащими знаками.
Обозначая через t коэффициент пропорциональности для отношений (6), получим полную систему решений системы (1):

При выводе формул (7) мы предполагали, что  . Однако, как легко убедиться, формулы (7) будут справедливы, если любой (хотя бы один) из миноров
. Однако, как легко убедиться, формулы (7) будут справедливы, если любой (хотя бы один) из миноров  отличен от нуля.
отличен от нуля.
Замечание. Если все миноры  равны нулю, то система (1) требует особого рассмотрения.
равны нулю, то система (1) требует особого рассмотрения.
Пример:

Решение:
Составляя матрицу коэффициентов
находим ее миноры:  На основании формулы (7) полная система решений системы (8) имеет вид
На основании формулы (7) полная система решений системы (8) имеет вид

где 
Простейшее ненулевое решение системы (1), получающееся при t — 1, есть х = -3, у = 18, z = 13.
Определители третьего порядка

Числа  называются элементами определителя; они расположены в трех строках и трех столбцах его (ряды определителя). ,
называются элементами определителя; они расположены в трех строках и трех столбцах его (ряды определителя). ,
Раскрывая определители второго порядка (миноры) в формуле (1) и собирая члены с одинаковыми знаками, получаем, что определитель третьего порядка представляет собой знакопеременную сумму шести слагаемых:

из которых три берутся со знаком плюс, а три — со знаком минус.
Пример:

Решение:
Используя формулу (1), имеем  В дальнейшем мы укажем более удобные способы вычисления определителей третьего порядка.
В дальнейшем мы укажем более удобные способы вычисления определителей третьего порядка.
Определение: Под минором элемента определителя третьего порядка понимается определитель младшего (второго) порядка, получающийся из данного определителя в результате вычеркивания строки и столбца, содержащих данный элемент.
Например, для определителя (3) минором его элемента 2, стоящего во второй строке и в первом столбце, является определитель  В дальнейшем для краткости будем говорить, что элемент определителя третьего порядка занимает четное место, если сумма номеров его строки и его столбца есть число четное, и нечетное место, если эта сумма есть число нечетное.
В дальнейшем для краткости будем говорить, что элемент определителя третьего порядка занимает четное место, если сумма номеров его строки и его столбца есть число четное, и нечетное место, если эта сумма есть число нечетное.
Определение: Алгебраическим дополнением (минором со знаком) элемента определителя третьего порядка называется минор этого элемента, взятый со знаком плюс, если элемент занимает четное место у и со знаком минус, если его место нечетное.
Таким образом, если М есть минор элемента определителя, a i и j — соответственно номер строки и номер столбца, на пересечении которых находится данный элемент, то его алгебраическое дополнение есть
Например, для элемента с2 определителя (1), находящегося во второй строке и в третьем столбце, его алгебраическое дополнение есть
Соответствующие знаки, приписываемые при этом минорам элементов определителя, можно задать таблицей
В дальнейшем алгебраические дополнения элементов определителя с буквенными элементами условимся обозначать соответствующими прописными (большими) буквами.
Теорема Разложения: Определитель третьего порядка равен сумме парных произведений элементов какого-либо ряда его на их алгебраические дополнения (под рядом понимается строка или столбец).
Таким образом, для определителя (1) справедливы шесть разложений: 
Легко проверить, что формулы (4) и (5) дают одно и то же выражение (2), принятое за определение.
Замечание. С помощью формул типа (4) или (5), по индукции, можно ввести определители высших порядков.
Основные свойства определителей
При формулировках мы не будем указывать порядок определителя, так как эти свойства справедливы для определителей любого порядка.
I. (Равноправность строк и столбцов.) Определитель не меняет своего значения при замене всех его строк соответствующими столбцами, т. е.
Действительно, разлагая первый определитель по элементам первой строки, а второй — по элементам первого столбца, в силу теоремы разложения мы получим один и тот же результат.
II. При перестановке двух параллельных рядов определителя его модуль сохраняет прежнее значение, а знак меняется на обратный.
Пусть, например, в определителе  переставлены первая и вторая строки; тогда получим определитель
переставлены первая и вторая строки; тогда получим определитель  Разлагая определитель D по элементам второй строки и учитывая, что при перестановке строк изменилась четность мест этих элементов, будем иметь
Разлагая определитель D по элементам второй строки и учитывая, что при перестановке строк изменилась четность мест этих элементов, будем иметь

Аналогичное положение получается и в других случаях.
Следствие 1. Определитель, у которого два параллельных ряда одинаковы, равен нулю.
В самом деле, пусть, например,
Переставляя первую и вторую строки определителя, в силу теоремы получим определитель -D. Но очевидно, эта операция не изменяет определитель D, поэтому -D = D и, следовательно, D = 0.
Следствие 2. Сумма парных произведений элементов какого-либо ряда определителя на алгебраические дополнения соответствующих элементов параллельного ряда равна нулю, т. е. для определителя (2) имеем  и т. д., а также
и т. д., а также  и т. д. (всего таких соотношений можно написать двенадцать).
и т. д. (всего таких соотношений можно написать двенадцать).
Левые части всех соотношений (3) и (4) представляют собой разложения соответствующих определителей третьего порядка, содержащих два одинаковых параллельных ряда и, следовательно, равны нулю. Например,  (здесь разложение нужно производить во второй строке!).
(здесь разложение нужно производить во второй строке!).
III. Общий множитель элементов какого-либо ряда определителя можно выносить за знак определителя, т. е.
Это свойство непосредственно вытекает из разложения определителя по элементам соответствующего ряда.
Следствие 1. Если все элементы какого-либо ряда определителя равны нулю, то определитель равен нулю.
Следствие 2. Если элементы какого-либо ряда определителя пропорциональны соответствующим элементам параллельного ряда его, то определитель равен нулю.
Например, имеем 
IV. Если элементы какого-либо ряда определителя представляют собой суммы двух слагаемых, то определитель может быть разложен на сумму двух соответствующих определителей.
Следствие. Величина определителя не изменится, если /с элементам какого-либо ряда его прибавить (или отнять) числа, пропорциональные соответствующим элементам параллельного ряда с одним и тем же коэффициентом пропорциональности (так называемые «элементарные преобразования определителя»).
Рассмотрим, например, определители
Используя свойства IV и III, будем иметь  Элементарные преобразования дают удобный способ вычисления определителей.
Элементарные преобразования дают удобный способ вычисления определителей.
Пример:
Вычислить симметричный определитель
Решение:
Вычитая из второй строки удвоенную первую строку, а из третьей строки утроенную первую строку, получим 
Система трех линейных уравнений
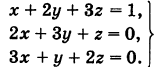
Рассмотрим стандартную линейную систему трех уравнений
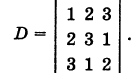
свободные члены которых находятся в правых частях. Под решением системы понимается всякая тройка чисел (х, у, г), удовлетворяющая этой системе. Введем определитель системы
 а также дополнительные определители
а также дополнительные определители
Последовательно умножая уравнения системы (1) на алгебраические дополнения  соответствующих элементов
соответствующих элементов 
 первого столбца определителя D, получим
первого столбца определителя D, получим

Отсюда, применяя теорему разложения и следствие 2 к свойству II, будем иметь  , т. е.
, т. е.  Используя алгебраические дополнения элементов второго и третьего столбцов определителя D, аналогично находим
Используя алгебраические дополнения элементов второго и третьего столбцов определителя D, аналогично находим

Если определитель системы  , то из уравнений (5) и
, то из уравнений (5) и  получаем единственное решение системы (1):
получаем единственное решение системы (1):  Таким образом, имеем правило Крамера: неизвестные стандартной линейной системы (1) с ненулевым определителем представляют собой дроби, знаменатель которых есть определитель системы, а числители равны соответствующим дополнительным определителям.
Таким образом, имеем правило Крамера: неизвестные стандартной линейной системы (1) с ненулевым определителем представляют собой дроби, знаменатель которых есть определитель системы, а числители равны соответствующим дополнительным определителям.
Замечание. Если определитель системы D = 0, то система (1) или несовместна, или имеет бесконечно много решений.
Пример:
Решение:
Вычитая из второго столбца удвоенный первый столбец, а из третьего столбца утроенный первый столбец, получим
Для дополнительных определителей находим следующие значения: 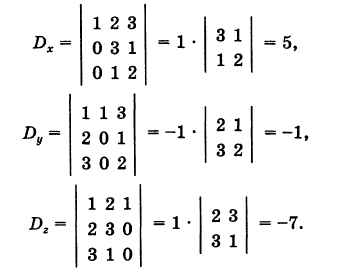 Используя правило Крамера, получаем решение системы:
Используя правило Крамера, получаем решение системы:

Однородная система трех линейных уравнений
Рассмотрим линейную систему

свободные члены которой равны нулю. Такая линейная система называется однородной.
Однородная линейная система (1), очевидно, допускает нулевое решение х = 0, у = 0, z = 0 и, следовательно, всегда совместна.
Интересно выяснить случаи, когда однородная система имеет ненулевые решения.
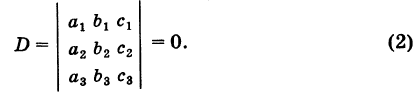
Теорема: Линейная однородная система трех линейных уравнений с тремя неизвестными имеет ненулевые решения тогда и только тогда, когда ее определитель равен нулю, т. е.
Доказательство: Пусть система (1) имеет ненулевое решение  Если определитель ее
Если определитель ее  то на основании формул Крамера система (1) обладает только нулевым решением, что противоречит предположению. Следовательно, D = 0.
то на основании формул Крамера система (1) обладает только нулевым решением, что противоречит предположению. Следовательно, D = 0.
Пусть D = 0. Тогда линейная система (1) либо несовместна, либо имеет бесконечно много решений. Но наша система совместна, так как имеется нулевое решение. Следовательно, система (1) допускает бесконечно много решений, в том числе и ненулевые.
Замечание. Укажем способ нахождения ненулевых решений однородной системы (1) в типичном случае.
Пусть определитель системы D = 0, но не все его миноры второго порядка равны нулю.
Мы будем предполагать, что

(этого всегда можно добиться с помощью перестановки уравнений и изменения нумерации неизвестных).
Рассмотрим подсистему, состоящую из двух первых уравнений системы (1):
В силу решения этой системы имеют вид

 где
где  — соответствующие алгебраические дополнения. Подставляя эти числа в неиспользованное третье уравнение системы (1) и учитывая, что определитель D = 0, получаем
— соответствующие алгебраические дополнения. Подставляя эти числа в неиспользованное третье уравнение системы (1) и учитывая, что определитель D = 0, получаем

Следовательно, формулы (5), где t произвольно, дают все решения полной системы (1).
Геометрически уравнения системы (1) представляют собой уравнения трех плоскостей в пространстве Oxyz. Если определитель  , то эти плоскости пересекаются в единственной точке 0(0, 0, 0); если же определитель D =0, но не все его миноры второго порядка равны нулю, то в нашем случае эти плоскости пересекаются по прямой линии (как «листы книги»). Без рассмотрения оставлен случай слияния трех плоскостей.
, то эти плоскости пересекаются в единственной точке 0(0, 0, 0); если же определитель D =0, но не все его миноры второго порядка равны нулю, то в нашем случае эти плоскости пересекаются по прямой линии (как «листы книги»). Без рассмотрения оставлен случай слияния трех плоскостей.
Система линейных уравнений с многими неизвестными. Метод Гаусса
Рассмотрим систему  линейных уравнений с
линейных уравнений с  неизвестными:
неизвестными:

Здесь для коэффициентов системы введена двойная индексация, а именно: у коэффициента  первый индекс i обозначает номер уравнения, а второй j — номер неизвестного. Для удобства выкладок свободные члены обозначены через
первый индекс i обозначает номер уравнения, а второй j — номер неизвестного. Для удобства выкладок свободные члены обозначены через 
Наиболее простой метод решения системы (1) — это метод исключения. Мы изложим его в форме схемы Гаусса (обычно называемой методом Гаусса).
Пусть для определенности  — ведущий коэффициент». Разделив все члены первого уравнения на аи, будем иметь приведенное уравнение
— ведущий коэффициент». Разделив все члены первого уравнения на аи, будем иметь приведенное уравнение


Рассмотрим i-e уравнение системы (1):

Для исключения xx из этого уравнения умножим приведенное уравнение (2) на ап и полученное уравнение вычтем из уравнения (4). Тогда будем иметь


Таким образом, получаем укороченную систему

коэффициенты которой определяются по формулам (6).
Если ее ведущий коэффициент  , то из системы (7) указанным выше приемом можно исключить неизвестное
, то из системы (7) указанным выше приемом можно исключить неизвестное  . причем новые коэффициенты будут вычисляться по формулам типа (6) и т.д. Эта часть вычислений называется прямым ходом метода Гаусса.
. причем новые коэффициенты будут вычисляться по формулам типа (6) и т.д. Эта часть вычислений называется прямым ходом метода Гаусса.
Для определения неизвестных 
 Рассмотрим приведенные уравнения
Рассмотрим приведенные уравнения

Отсюда последовательно находим неизвестные (обратный ход)  Заметим, что операции (9) выполняются без деления.
Заметим, что операции (9) выполняются без деления.
Если очередной ведущий коэффициент окажется равным нулю, то уравнения системы следует переставить надлежащим образом. Возможно, конечно, что система (1) несовместна. Тогда, естественно, метод Гаусса не допускает реализации.
Пример:
Методом Гаусса решить систему

Решение:
Составляем таблицу коэффициентов системы (10), рассматривая свободные члены ее как коэффициенты при  :
: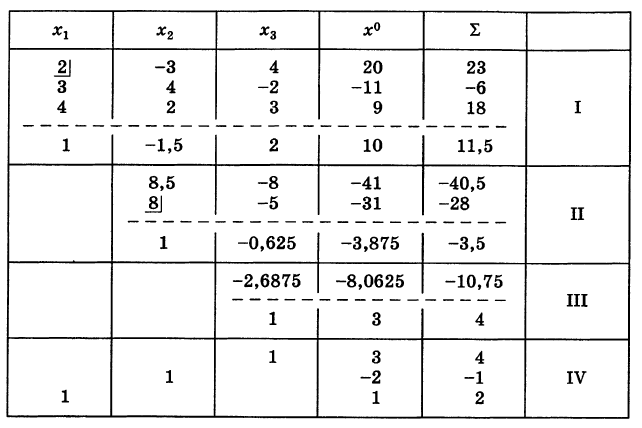
Последний столбец  содержит суммы элементов соответствующих строк таблицы; этот столбец служит для контроля вычислений.
содержит суммы элементов соответствующих строк таблицы; этот столбец служит для контроля вычислений.
Считая отмеченный коэффициент 2 ведущим и деля на этот коэффициент все элементы первой строки таблицы (включая и входящий в столбец  ), получаем коэффициенты первого приведенного уравнения (см. табл.). Текущий контроль вычислений осуществляется тем, что элемент из столбца
), получаем коэффициенты первого приведенного уравнения (см. табл.). Текущий контроль вычислений осуществляется тем, что элемент из столбца  равен сумме всех остальных элементов этой строки. Этим заканчивается заполнение раздела I таблицы.
равен сумме всех остальных элементов этой строки. Этим заканчивается заполнение раздела I таблицы.
Далее, используя формулу (6), подсчитываем коэффициенты укороченной системы, не содержащей неизвестного xv Для наглядности будем называть строку, содержащую коэффициенты приведенного уравнения, приведенной, а столбец, содержащий ведущий элемент раздела, — ведущим. Тогда на основании формулы (6) справедливо правило: преобразованные коэффициенты схемы Гаусса, равны ее прежним коэффициентам минус произведение «проекций» их на соответствующие приведенную строку и ведущий столбец таблицы. Пользуясь этим, заполняем раздел II таблицы, включая контрольный столбец. Для удобства вычислении в качестве ведущего коэффициента раздела П берем элемент 8 (см. табл.).
Аналогично производится заполнение раздела III таблицы. Этим заканчивается прямой ход схемы Гаусса.
Неизвестные  последовательно определяются из приведенных уравнений
последовательно определяются из приведенных уравнений
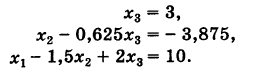
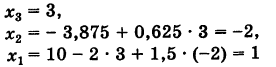
(обратный ход). Результаты обратного хода помещены в разделе IV таблицы.
Заметим, что если в качестве свободных членов взять элементы столбца  , то для неизвестных получатся значения
, то для неизвестных получатся значения 

 превышающие на единицу значения неизвестных
превышающие на единицу значения неизвестных  Этим обеспечивается заключительный контроль вычислений.
Этим обеспечивается заключительный контроль вычислений.
| Рекомендую подробно изучить предметы: |
|
| Ещё лекции с примерами решения и объяснением: |
- Метод Гаусса — определение и вычисление
- Прямая линия на плоскости и в пространстве
- Плоскость в трехмерном пространстве
- Функция одной переменной
- Ряды в математике
- Дифференциальные уравнения с примерами
- Обратная матрица — определение и нахождение
- Ранг матрицы — определение и вычисление
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Исследование СЛАУ. Общие сведения
В данной статье мы расскажем о методах, видах, условиях и определениях исследований решений систем линейных уравнений, что такое метод Кронекера-Капели, а также приведем примеры.
Общие сведения (определения, условия, методы, виды)
Системы линейных алгебраических уравнений с n неизвестными могут иметь:
- единственное решение;
- бесконечное множество решение (неопределенные СЛАУ);
- ни одного решения (несовместные СЛАУ).
Пример 1
Система x + y + z = 1 2 x + 2 y + 2 z = 3 не имеет решений, поэтому она несовместна.
Система x + y = 1 2 x + 7 y = — 3 имеет единственное решение x = 2 ; y = 1 .
Система x + y = 1 2 x + 2 y = 2 3 x + 3 y = 3 имеет бесконечное множество решений x = t y = 1 — t при — ∞ t ∞ .
Перед решением системы уравнений необходимо исследовать систему, т.е. ответить на следующие вопросы:
- Совместна ли система?
- Если система совместна, то, какое количество решений она имеет — одно или несколько?
- Как найти все решения?
Если система малоразмерна при m = n , то ответить на поставленные вопросы можно при помощи метода Крамера:
- если основной определитель системы, то система совместна и имеет единственное решение, которое вычисляется методом Крамера;
- если, и один из вспомогательных определителей, то система не является совместной, т.е. не имеет решений;
- если и все, и один из коэффициентов СЛАУ, то система не является определенной и имеет бесконечное множество решений.
Ранг матрицы и его свойства
Бывают случаи, которые выбиваются из представленных вариантов решения СЛАУ, например, линейные уравнения с большим количеством уравнений и неизвестных.
Для такого варианта решения существует ранг матрицы, который представляет собой алгоритм действий в случае решения системы матрицы, когда
В математике выделяют следующие подходы к определению ранга матрицы:
- при помощи понятия линейной зависимости/независимости строк/столбцов матрицы. Ранг равен максимальному количеству независимых строк (столбцов) матрицы
- при помощи понятия минора матрицы в качестве наивысшего порядка минора, который отличается от нуля. Минор матрицы порядка k — определитель k-го порядка, составленный из элементов, которые стоят на пересечении вычеркиваемых k-строк и k-столбцов матрицы;
- при помощи метода Гаусса. По завершении прямого хода ранг матрицы равняется количеству ненулевых строк.
Обозначение ранга матрицы: r ( A ) , r g ( A ) , r A .
Свойства ранга матрицы:
- квадратная невырожденная матрица обладает рангом, который отличается от нуля;
- если транспонировать матрицу, то ранг матрицы не изменяется;
- если поменять местами 2 параллельные строки или 2 параллельных столбца, ранг матрицы не изменяется;
- при удалении нулевого столбца или строки ранг матрицы не изменяется;
- ранг матрицы не изменяется, если удалить строку или столбец, которые являются линейной комбинацией других строк;
- при умножении все элементов строки/столбца на число k н е р а в н о н у л ю ранг матрицы не изменяется;
- ранг матрицы не больше меньшего из ее размеров: r ( А ) ≤ m i n ( m ; n ) ;
- когда все элементы матрицы равны нулю, то только тогда r ( A ) = 0 .
Пример 2
А 1 = 1 1 1 2 2 2 3 3 3 , B 1 = 1 0 0 0 0 0
r ( A 1 ) = 1 , r ( B 1 ) = 1
А 2 = 1 2 3 4 0 5 6 7 0 0 0 0 ; В 2 = 1 1 3 1 2 1 4 3 1 2 5 0 5 4 13 6
Системы линейных уравнений определители и их свойства
Системой m линейных уравнений с n неизвестными называется система вида

где aij и bi (i=1,…,m; b=1,…,n) – некоторые известные числа, а x1,…,xn – неизвестные. В обозначении коэффициентов aij первый индекс iобозначает номер уравнения, а второй j – номер неизвестного, при котором стоит этот коэффициент.
Коэффициенты при неизвестных будем записывать в виде матрицы  , которую назовём матрицей системы.
, которую назовём матрицей системы.
Числа, стоящие в правых частях уравнений, b1,…,bm называются свободными членами.
Совокупность n чисел c1,…,cn называется решением данной системы, если каждое уравнение системы обращается в равенство после подстановки в него чисел c1,…,cn вместо соответствующих неизвестных x1,…,xn.
Наша задача будет заключаться в нахождении решений системы. При этом могут возникнуть три ситуации:
- Система может иметь единственное решение.
- Система может иметь бесконечное множество решений. Например,
 . Решением этой системы является любая пара чисел, отличающихся знаком.
. Решением этой системы является любая пара чисел, отличающихся знаком. - И третий случай, когда система вообще не имеет решения. Например, , если бы решение существовало, то x1 + x2 равнялось бы одновременно нулю и единице.
 . Решением этой системы является любая пара чисел, отличающихся знаком.
. Решением этой системы является любая пара чисел, отличающихся знаком. , если бы решение существовало, то x1 + x2 равнялось бы одновременно нулю и единице.
, если бы решение существовало, то x1 + x2 равнялось бы одновременно нулю и единице.Система линейных уравнений, имеющая хотя бы одно решение, называется совместной. В противном случае, т.е. если система не имеет решений, то она называется несовместной.
Рассмотрим способы нахождения решений системы.
МАТРИЧНЫЙ МЕТОД РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ
Матрицы дают возможность кратко записать систему линейных уравнений. Пусть дана система из 3-х уравнений с тремя неизвестными:

Рассмотрим матрицу системы  и матрицы столбцы неизвестных и свободных членов
и матрицы столбцы неизвестных и свободных членов 

т.е. в результате произведения мы получаем левые части уравнений данной системы. Тогда пользуясь определением равенства матриц данную систему можно записать в виде
 или короче A∙X=B.
или короче A∙X=B.
Здесь матрицы A и B известны, а матрица X неизвестна. Её и нужно найти, т.к. её элементы являются решением данной системы. Это уравнение называют матричным уравнением.
Пусть определитель матрицы отличен от нуля |A| ≠ 0. Тогда матричное уравнение решается следующим образом. Умножим обе части уравнения слева на матрицу A -1 , обратную матрице A:  . Поскольку A -1 A = E и E∙X = X, то получаем решение матричного уравнения в виде X = A -1 B.
. Поскольку A -1 A = E и E∙X = X, то получаем решение матричного уравнения в виде X = A -1 B.
Заметим, что поскольку обратную матрицу можно найти только для квадратных матриц, то матричным методом можно решать только те системы, в которых число уравнений совпадает с числом неизвестных. Однако, матричная запись системы возможна и в случае, когда число уравнений не равно числу неизвестных, тогда матрица A не будет квадратной и поэтому нельзя найти решение системы в виде X = A -1 B.
Примеры. Решить системы уравнений.

Найдем матрицу обратную матрице A.
 ,
, 
Таким образом, x = 3, y = – 1.

Решите матричное уравнение: XA+B=C, где 
Выразим искомую матрицу X из заданного уравнения.

Найдем матрицу А -1 .


Решите матричное уравнение AX+B=C, где 
Из уравнения получаем  .
.

Следовательно,
Рассмотрим систему 3-х линейных уравнений с тремя неизвестными:
Определитель третьего порядка, соответствующий матрице системы, т.е. составленный из коэффициентов при неизвестных,

называется определителем системы.
Составим ещё три определителя следующим образом: заменим в определителе D последовательно 1, 2 и 3 столбцы столбцом свободных членов

Тогда можно доказать следующий результат.
Теорема (правило Крамера). Если определитель системы Δ ≠ 0, то рассматриваемая система имеет одно и только одно решение, причём

Доказательство. Итак, рассмотрим систему 3-х уравнений с тремя неизвестными. Умножим 1-ое уравнение системы на алгебраическое дополнение A11 элемента a11, 2-ое уравнение – на A21 и 3-е – на A31:

Сложим эти уравнения:

Рассмотрим каждую из скобок и правую часть этого уравнения. По теореме о разложении определителя по элементам 1-го столбца
 .
.
Далее рассмотрим коэффициенты при x2:

Аналогично можно показать, что и  .
.
Наконец несложно заметить, что 
Таким образом, получаем равенство:  .
.
Следовательно,  .
.
Аналогично выводятся равенства  и
и  , откуда и следует утверждение теоремы.
, откуда и следует утверждение теоремы.
Таким образом, заметим, что если определитель системы Δ ≠ 0, то система имеет единственное решение и обратно. Если же определитель системы равен нулю, то система либо имеет бесконечное множество решений, либо не имеет решений, т.е. несовместна.
Примеры. Решить систему уравнений

Решите систему уравнений при различных значениях параметра p: 
Система имеет единственное решение, если Δ ≠ 0.
 . Поэтому
. Поэтому  .
.

- При
- При p = 30 получаем систему уравнений которая не имеет решений.
- При p = –30 система принимает вид и, следовательно, имеет бесконечное множество решений x=y,y Î R.

 которая не имеет решений.
которая не имеет решений. и, следовательно, имеет бесконечное множество решений x=y,y Î R.
и, следовательно, имеет бесконечное множество решений x=y,y Î R.Ранее рассмотренные методы можно применять при решении только тех систем, в которых число уравнений совпадает с числом неизвестных, причём определитель системы должен быть отличен от нуля. Метод Гаусса является более универсальным и пригоден для систем с любым числом уравнений. Он заключается в последовательном исключении неизвестных из уравнений системы.
Вновь рассмотрим систему из трёх уравнений с тремя неизвестными:
 .
.
Первое уравнение оставим без изменения, а из 2-го и 3-го исключим слагаемые, содержащие x1. Для этого второе уравнение разделим на а21 и умножим на –а11, а затем сложим с 1-ым уравнением. Аналогично третье уравнение разделим на а31 и умножим на –а11, а затем сложим с первым. В результате исходная система примет вид:

Теперь из последнего уравнения исключим слагаемое, содержащее x2. Для этого третье уравнение разделим на  , умножим на
, умножим на  и сложим со вторым. Тогда будем иметь систему уравнений:
и сложим со вторым. Тогда будем иметь систему уравнений:

Отсюда из последнего уравнения легко найти x3, затем из 2-го уравнения x2 и, наконец, из 1-го – x1.
При использовании метода Гаусса уравнения при необходимости можно менять местами.
Часто вместо того, чтобы писать новую систему уравнений, ограничиваются тем, что выписывают расширенную матрицу системы:

и затем приводят её к треугольному или диагональному виду с помощью элементарных преобразований.
К элементарным преобразованиям матрицы относятся следующие преобразования:
- перестановка строк или столбцов;
- умножение строки на число, отличное от нуля;
- прибавление к одной строке другие строки.
Примеры: Решить системы уравнений методом Гаусса.

Вернувшись к системе уравнений, будем иметь


Выпишем расширенную матрицу системы и сведем ее к треугольному виду.

Вернувшись к системе уравнений, несложно заметить, что третье уравнения системы будет ложным, а значит, система решений не имеет.

Разделим вторую строку матрицы на 2 и поменяем местами первый и третий столбики. Тогда первый столбец будет соответствовать коэффициентам при неизвестной z, а третий – при x.

Вернемся к системе уравнений. 
Из третьего уравнения выразим одну неизвестную через другую и подставим в первое.

Таким образом, система имеет бесконечное множество решений.
http://zaochnik.com/spravochnik/matematika/issledovanie-slau/slau/
http://toehelp.ru/theory/math/lecture14/lecture14.html