Системы сил теоретичесой механики
Вы будете перенаправлены на Автор24
Система сходящихся сил — это система таких сил, линии действия которых полностью сходятся в одной точке. Действие каждой силы на абсолютно твердое тело не меняется при переносе силы вдоль линии ее действия на иную точку тела.
Система сходящихся сил
Сила — мера механического взаимодействия материальных объектов. По своей природе сила — векторная величина и в общем случае она характеризуется:
- направлением и линией действия;
- численной величиной (модулем);
- точкой приложения.
Пусть дана произвольная система сил, $(F_1,F_2. F_n)$, приложенных к твердому телу. Перенесем эти силы, как скользящие векторы, в точку пересечения линий их действия. Затем, пользуясь аксиомой о параллелограмм сил, найдем равнодействующую этих сил.
Равнодействующую $R$ такой системы сил можно определить графически и аналитически.
Графически равнодействующая сила определяется как замыкающая сторона многоугольника сил: $ \vec
Аналитически равнодействующую силу можно определить по ее проекциями на оси прямоугольной системы координат. Здесь и далее применяем правую систему координат. По теореме о проекции векторной (Геометрической) суммы на оси координат получим:
$ R_x = \sum \limits_
$ R_y = \sum \limits_
$ R_z = \sum \limits_
где $F_ix, F_iy, F_iy$ — проекции соответствующих сил на оси координат. Тогда модуль равнодействующей $R$ запишем в виде:
$R = \sqrt < (\sum \limits_
Направление равнодействующей силы определяется такими направляющими косинусами:
Готовые работы на аналогичную тему
Условия равновесия системы сходящихся сил
Для равновесия системы сходящихся сил (далее система сил) необходимо и достаточно, чтобы равнодействующая сила была равна нулю: $R=0$
Необходимость условия равновесия следует из того, что заданная система сил, приложенных к твердому телу, эквивалентна одной силе — равнодействующей $Р$. Очевидно, что под действием одной силы тело будет находиться в равновесии только тогда, когда эта сила равна нулю, что следует из аксиомы о двух силы.
Докажем достаточность этого условия. Для этого покажем, что когда равнодействующая сила равна нулю, то система сил находится в равновесии. Заданная система сил эквивалентна равнодействующей, равной нулю. Из определения уравновешенной (эквивалентной нулю) системы сил, ее можно отбросить, не нарушая состояния системы. Тогда на тело не действуют никакие силы, и оно по первому закону Ньютона находится в равновесии. Поскольку
то многоугольник сил должен быть замкнутым, то есть конец последней силы $F$ совпадает с началом первой силы, $F_1$, что выражает условие равновесия системы сил в графической форме.
Векторной части равенства соответствуют три скалярные части равенства:
$R_z=0$, которые с учетом формул, перепишем в виде
$ \sum \limits_
$ \sum \limits_
$ \sum \limits_
Эти данные являются условиями равновесия системы сил в аналитической форме и формулируются так: для равновесия пространственной системы сил необходимо и достаточно, чтобы алгебраические суммы проекций сил были взаимно перпендикулярные оси и равны нулю.
В случае равновесия системы сил, лежащих в одной плоскости, например, $0xy$, получим
$ \sum \limits_
$ \sum \limits_
Условия равновесия называются также уравнениями равновесия. С их помощью определяются неизвестные величины при решении конкретных задач. Если неизвестными силами являются реакции связей, то их количество не должно превышать числа уравнений равновесия, иначе задача будет статически неопределенной и решить ее методами теоретической механики не получится.
Преобразование произвольной системы сил
Силу, которая приложена к твердому телу, можно перенести параллельно в иную точку тела, прибавляя силу с периодом, равным периоду переносимой силы касательно точки, куда она переносится.
Указанное преобразование – это сходящаяся сумма и система сил моментов пар сил. Взаимодействие системы сил, которые заменяют действие суммарной силы, и взаимодействие моментов — называется суммарным моментом.
Общий суммарный вектор $R$ — это основной вектор системы сил.
Общий cуммарный момент $M_o (F_k)$ — это основной момент системы сил.
Таким образом, произвольная система сил в тождественном преобразовании приводится к главному моменту системы сил и главному вектору.
Аналитически главный момент и главный вектор системы сил определяются через их проекции на общей оси координат:
$R = \sqrt < \sum \limits_
$M = \sqrt < \sum \limits_
Условия для равновесия систем сил
Равновесие системы сил. Все воздействие системы сил схоже с действием одной равнодействующей силы. Для процесса равновесия тела нужно, чтобы равнодействующая была равна нулю $R=0$.
Из формулы говориться о том, что $R = \sqrt < (\sum \limits_
Для процесса равновесия пространственной системы для сил достаточно и необходимо, чтобы общая сумма проекций сил на оси $X, Y, Z$ была равна нулю $sum
Для процесса равновесия плоской системы сил нужно, чтобы сумма проекций сил на оси $X, Y$ была равна нулю
Равновесие произвольной системы сил. Общее воздействие произвольной системы сил равно действию главного момента и главного вектора. Для процесса равновесия достаточно выполнения и необходимо условия: $R = 0$, $M_0 (F_k)=0$
Для процесса равновесия произвольной системы сил достаточно и необходимо, чтобы общие суммы проекций для всех сил на оси $X, Y, Z$ и общей суммы моментов сил касательно осей $X, Y,Z$ равнялись нулю:
Для процесса равновесия произвольной плоской системы сил достаточно и необходимо, чтобы общая сумма проекций основного вектора на оси $X, Y$, и сумма моментов (алгебраическая) сил относительно центра $О$ равнялись нулю:
Система сил на плоскости в теоретической механике
Содержание:
Различные случаи приведения плоской системы сил:
Плоской системой сил называют совокупность сил, расположенных в одной плоскости
Приведение плоской системы сил к точке. Для изучения плоской системы сил, т. е. совокупности сил, приложенных к твердому телу и расположенных в одной плоскости, приведем все силы к центру приведения, выбрав его где-либо в той же плоскости. Тогда мы получим в центре приведения плоский пучок сил, геометрически сложив которые, мы найдем главный вектор системы. Кроме того, при приведении всех сил к точке мы получим пары, расположенные в одной плоскости. Как уже было сказано, в плоской системе моменты сил относительно точки и моменты пар направлены перпендикулярно к плоскости системы в ту или другую сторону. Эти моменты вполне характеризуются величиной и знаком, а потому для вычисления главного момента плоской системы относительно центра приведения, лежащего в плоскости системы, нужно взять алгебраическую сумму моментов всех сил системы относительно центра приведения. Следовательно, система сил, произвольно расположенных на плоскости, эквивалентна главному вектору, равному геометрической сумме всех сил и приложенному к твердому телу в любой точке этой плоскости, и главному моменту, равному алгебраической сумме моментов всех сил относительно той же точки: 

Величину главного вектора удобно вычислить по его проекциям на координатные оси, равным суммам проекций на эти оси всех сил плоской системы:
 (5)
(5)
Направление главного вектора можно определить по направляющим косинусам (6′).
Если за центр приведения принято начало координат, то, выражая момент каждой силы плоской системы по (16) и суммируя, получим следующее выражение для главного момента плоской системы сил относительно начала координат:
 (29′)
(29′)
Задача №1
К твердому телу в точке A (x1=+10, у =+4) приложена сила F1 = 3, направленная вниз по вертикали; сила F2 = 4 направлена по оси Ox в положительную сторону и приложена к тому же телу. Длины выражены в метрах и силы — в ньютонах. Направление осей координат обычное (Ох горизонтально вправо, Oy вертикально вверх). Привести обе силы к началу координат и заменить данную систему сил главным вектором и главным моментом (см. рис. 52).
Решение. Определив сумму проекций данных сил на оси координат, величину главного вектора вычислим по формуле (5), а его направление—по (6′): Fгл=5; cos а= =0,800; cosβ = —
=0,800; cosβ = — =—0,600. Главный момент относительно начала координат вычислим по формуле (29′) или (29): Мгл. о = —30.
=—0,600. Главный момент относительно начала координат вычислим по формуле (29′) или (29): Мгл. о = —30.
Ответ. Главный вектор равен 5 н, приложен в начале координат и направлен вправо и вниз под углом 36 о 52′ к оси Ox и 126 о 52′ к оси Оу, главный момент равен —30 н∙м.
Если главный вектор плоской системы сил не равен нулю, то система приводится к одной равнодействующей
Случай приведения к равнодействующей
Величину и направление главного вектора произвольной системы сил определяют по формулам, аналогичным тем, по которым определяют равнодействующую системы сходящихся сил. Между тем главный вектор произвольной системы сил не является равнодействующей этой системы. В самом деле, равнодействующей называют силу, которая одна эквивалентна системе сил, а главный вектор сам по себе не эквивалентен данной системе сил, но эквивалентен ей только в совокупности с главным моментом.
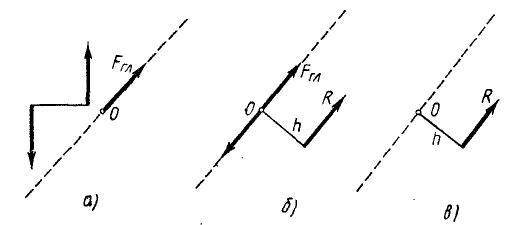
Рис. 51
Главный вектор может быть равнодействующей плоской системы сил лишь в случае, если главный момент системы относительно центра приведения равен нулю. Тогда главный вектор один, без главного момента, эквивалентен данной системе сил.
Следовательно: если главный вектор не равен нулю, а главный момент относительно центра приведения равен нулю, то система приводится к равнодействующей, линия действия которой проходит через центр приведения.
Если же главный момент не равен нулю, то мы можем представить его в виде пары сил, которые мы выберем равными главному вектору, а плечо h—равным отношению величин главного момента и главного вектора (рис. 51,а):
 (30)
(30)
Действие пары на тело не зависит от положения этой пары в ее плоскости, и мы вправе расположить ее так, чтобы одна из сил этой пары была направлена по линии действия главного вектора в сторону, ему противоположную (рис. 51,6). Тогда, отбрасывая эту силу вместе с главным вектором, как взаимно уравновешенные, мы получим только одну силу (рис. 51, в), эквивалентную данной системе; эта сила является равнодействующей данной системы. Мы видим, что равнодействующая по модулю равна главному вектору, параллельна ему по направлению, но отличается от него линией действия.
Следовательно: если главный вектор и главный момент плоской системы сил не равны пулю, то система приводится к равнодействующей, линия действия которой не проходит через центр приведения.
Учитывая, что главный вектор  по величине и направлению равен равнодействующей
по величине и направлению равен равнодействующей  (рис. 51), а также учитывая (29), можно равенство (30) переписать так:
(рис. 51), а также учитывая (29), можно равенство (30) переписать так:
 (18)
(18)
Мы получили теорему Вариньона: момент равнодействующей плоской системы сил относительно какой-либо точки, лежащей в этой плоскости, равен алгебраической сумме моментов составляющих относительно той же точки.
Задача №2
Найти равнодействующую системы сил, заданных в условии задачи №1.
Решение. При решении задачи № 15 данная система приведена к главному вектору 5 н и главному моменту —30 н . м. Представим этот главный момент в виде пары, силы которой по модулю равны главному вектору, а плечо равно отношению величии главного момента и главного вектора, т. е. F= 5 и h= =6. Момент пары отрицательный — вращение по стрелке часов. Расположим пару так (рис. 52), чтобы одна из ее сил уравновесила главный вектор. Система приведена к одной силе, равной и параллельной главному вектору, но линия действия этой силы отстоит от начала координат на 6 м. Нетрудно из (29′) получить уравнение линии действия равнодействующей, т. е. —хЗ—у4 — —30.
=6. Момент пары отрицательный — вращение по стрелке часов. Расположим пару так (рис. 52), чтобы одна из ее сил уравновесила главный вектор. Система приведена к одной силе, равной и параллельной главному вектору, но линия действия этой силы отстоит от начала координат на 6 м. Нетрудно из (29′) получить уравнение линии действия равнодействующей, т. е. —хЗ—у4 — —30.
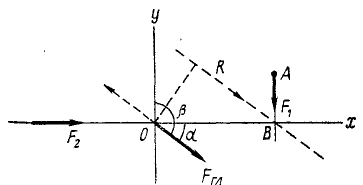
Рис. 52
К тому же результату можно прийти (и в данном случае проще), если заданные силы F1 и Ft перенести в точку В пересечения их линий действия и там сложить.
Ответ. Равнодействующая равна 5 я и лежит на прямой 3x+4y = 30.
Если главный вектор системы сил равен нулю, а главный момент нулю не равен, то система приводится к паре сил
Случай приведения к паре
Исследуем случай, когда главный вектор системы равен нулю, но главный момент системы относительно центра приведения нулю не равен. Если главный вектор системы равен нулю, то, следовательно, нет и равнодействующей. Главный момент мы всегда можем представить в виде пары. Следовательно, если главный вектор равен нулю, а главный момент не равен нулю, то система приводится к паре сил.
Заметим, что главный момент не зависит от центра приведения в том случае, когда главный вектор системы равен нулю. В самом деле, если система сил эквивалентна паре сил с моментом, равным главному моменту системы, а момент пары, как известно (см. § 10), не зависит от центра моментов, то, следовательно, и главный момент (в этом случае) не зависит от центра приведения. Это ясно и из логических соображений: правильно (без ошибок) полученный результат приведения системы сил зависит только от данной системы, но не может зависеть от нашего подсчета. Он существует объективно, независимо от нас. Если система сил эквивалентна паре, то ясно, что, какую бы точку мы ни принимали за центр приведения, мы всякий раз должны получать одну и ту же пару и один и тот же главный момент.
Задача №3
В точках Л, В и C к твердому телу приложены силы  ,
,  и
и  . В некотором масштабе (например, 1 н = 1 см) эти силы изображаются направленными отрезками: =
. В некотором масштабе (например, 1 н = 1 см) эти силы изображаются направленными отрезками: = ,
,  =
= ,
,  =
=  (рис. 53, а). Исследовать систему сил.
(рис. 53, а). Исследовать систему сил.
Решение. Выбрав за центр приведения какую-либо точку, например точку О, и перенеся по методу Пуансо в эту точку все силы, убедимся, что силовой многоугольник замкнут, а следовательно, главный вектор равен нулю. Главный момент системы относительно точки О равен алгебраической сумме моментов трех сил, изображаемых удвоенными площадями треугольников (рис. 53, б):

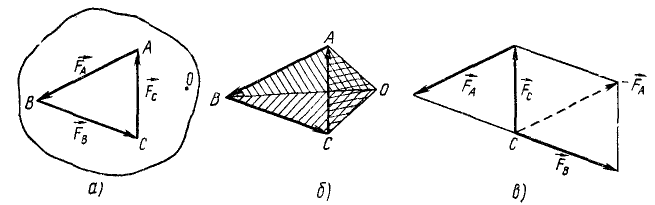
Рис. 53
Независимо от центра приведения О главный момент системы равен удвоенной площади треугольника АВС, т. е. система сил эквивалентна паре.
К такому же результату мы придем путем следующих рассуждений. Главный вектор системы (а следовательно, и равнодействующая) равен нулю, так как силовой многоугольник замкнут. Вместе с тем система данных трех сил не может находиться в равновесии, так как не удовлетворено необходимое условие равновесия трех сил: линии их действия не пересекаются в одной точке. Перенеся силу  (рис. 53, в) по ее линии действия в точку C и сложив ее с силой
(рис. 53, в) по ее линии действия в точку C и сложив ее с силой  , получим равнодействующую этих двух сил, равную и противоположную третьей силе
, получим равнодействующую этих двух сил, равную и противоположную третьей силе  и составляющую вместе с ней пару сил.
и составляющую вместе с ней пару сил.
Ответ. Данная система трех сил эквивалентна паре сил.
Если главный вектор и главный момент системы сил равны нулю, то система сил находится в равновесии
Случай равновесия
Если дана система сил и, приведя ее к какому-либо центру, мы убеждаемся, что и главный вектор и главный момент системы равны нулю, то наличие этой системы эквивалентно ее отсутствию, т. е. система находится в равновесии.
Справедливо и обратное заключение: если данная система сил находится в равновесии, то главный вектор системы и главный момент системы относительно центра приведения равняются нулю. Следовательно, условия
 (31)
(31)
являются необходимыми и достаточными условиями равновесия плоской системы сил. И в этом случае главный момент не зависит от центра приведения. В самом деле, если система сил находится в равновесии, то равновесие не может нарушиться от того, выберем ли мы за центр приведения ту или иную точку плоскости.
Все возможные частные случаи приведения плоской системы сил к данной точке представлены в следующей таблице:
| Fгл |  0 0 |  0 0 |  0 0 |  0 0 |
| Мгл |  0 0 | =0 |  0 0 | =0 |
| Равнодействующая не проходит | проходит через центр приведения | Пара сил | Равновесие | ||
Таблица систематизирует возможные случаи приведения плоской системы сил и не нуждается в пояснениях.
Равновесие плоской системы сил
Для равновесия плоской системы сил необходимо и достаточно, чтобы равнялись нулю суммы проекций всех сил на оси координат и сумма моментов всех сил относительно какой-либо точки плоскости 
Первая форма уравнений равновесия
Условия равновесия (31) плоской системы сил можно переписать так:
 (32)
(32)
Первое из этих равенств является геометрическим. Мы можем заменить это геометрическое равенство двумя аналитическими, как это было сделано при отыскании аналитической формы условий равновесия плоского пучка сил. Оставляя второе из равенств (32) без изменений, мы получим условия равновесия плоской системы сил в следующем виде:
 (33)
(33)
Таким образом, для равновесия системы сил, произвольно расположенных на плоскости, необходимо и достаточно, чтобы равнялись нулю суммы проекций всех сил на оси координат и сумма моментов всех сил относительно какой-либо точки плоскости.
Заметим, что оси координат не обязательно должны быть между собой перпендикулярны, а могут составлять любой отличный от нуля угол, если по условию задачи целесообразно дать им такие направления. Сумму моментов можно взять относительно любой точки плоскости системы сил, поскольку при равновесии системы главный момент ее не зависит от центра приведения.
Соотношения (33) называют условиями равновесия системы сил, произвольно расположенных на плоскости. Если эти соотношения содержат неизвестные величины, то их называют уравнениями равновесия.
Задача №4
Однородная балка AB весом P = 20κΓ опирается на гладкий горизонтальный пол в точке В под углом 60° и, кроме того, поддерживается двумя опорами C и D. Определить реакции опор в точках В, C и D, если длина AB=3м, CB=0,5 м , BD= 1 м (рис. 54).
Решение. Порядок решения задач на равновесие плоской системы сил такой же, как и при решении задач на равновесие плоской системы сходящихся сил, только в данном случае мы имеем три, а не два уравнения равновесия.
Все искомые и известные силы в этой задаче действуют на балку АВ, поэтому рассмотрим равновесие балки АВ.
На балку действуют одна активная сила (собственный вес) и три реакции в трех точках опоры. Реакции, как всегда, направлены перпендикулярно виртуальным перемещениям. Таким перемещением балки АВ, не нарушающим ее связи с полом, является горизонтальное перемещение, и реакцию RВ мы направим вертикально вверх. Давая балке AB мысленные малые перемещения, не нарушающие ее связи с полом, мы не должны беспокоиться о том, чтобы эти перемещения не нарушили связи в других местах, например в точке С. Аналогично, определяя виртуальные перемещения в точке С, мы не заботимся о том, что при этом нарушается связь в точке В. Перемещениями, не нарушающими связи в точках C и D, являются перемещения вдоль балки (подобно смычку по струне), поэтому реакции в точках C и D направим перпендикулярно балке.
Строим оси координат:
Удачный выбор системы координат может упростить уравнения равновесия. Можно пользоваться и косоугольной системой координат, например, направив одну ось горизонтально, а другую—под углом 60° по BA. Мы направим оси, как указано на чертеже. Тогда

За центр моментов удобнее принимать точку, в которой пересекаются линии действия неизвестных по величине реакций. Так, в данном случае удобно принять точку, в которой пересекаются линии действия реакций RB и RC. В результате такого выбора обе эти реакции не войдут в уравнение моментов. Чтобы определить плечо реакции RD, опустим перпендикуляр из центра моментов на линию действия этой реакции. Нетрудно видеть, что плечо CD = 0,5 м. Чтобы определить плечо силы тяжести, опустим перпендикуляр из центра моментов на линию действия этой силы. Получим  cos 60° = 0,75 м. Реакция RD относительно центра моментов направлена против хода часов (момент положителен), а сила тяжести — по ходу часов (момент отрицателен). Уравнение моментов имеет вид
cos 60° = 0,75 м. Реакция RD относительно центра моментов направлена против хода часов (момент положителен), а сила тяжести — по ходу часов (момент отрицателен). Уравнение моментов имеет вид

Решая совместно все три уравнения равновесия, получаем ответ.
Для равновесия плоской системы сил необходимо н достаточно, чтобы равнялись нулю суммы моментов всех сил относительно трех каких-либо точек плоскости, не лежащих на одной прямой: 
Система сил, действующих на балку АВ, состоит из двух пар сил. Рекомендуем решить эту задачу при помощи уравнения (26′) равновесия системы пар на плоскости, по примеру задачи № 13. Вторая форма уравнений равновесия. Необходимые и достаточные условия равновесия плоской системы сил можно выразить не только равенствами (33). К одному из других видов условий равновесия плоской системы сил приводит теорема, обычно называемая теоремой о трех моментах: для равновесия системы сил, произвольно расположенных на плоскости, необходимо и достаточно, чтобы равнялись нулю суммы моментов всех сил системы относительно каждой из трех точек, произвольно взятых на плоскости, но не лежащих на одной прямой. Докажем эту теорему.
Пусть дана плоская система сил. Возьмем в плоскости произвольную точку А и определим сумму моментов всех сил относительно этой точки. Если бы сумма моментов не равнялась нулю, то система, конечно, не была бы в равновесии. Если же  , то система может либо находиться в равновесии, либо быть приведенной к равнодействующей, проходящей через точку А (см. таблицу на стр. 79). Следовательно, написанное условие хотя и необходимо, но не достаточно для равновесия системы. Возьмем в той же плоскости другую произвольную точку В и определим сумму моментов всех сил системы относительно точки В. Если
, то система может либо находиться в равновесии, либо быть приведенной к равнодействующей, проходящей через точку А (см. таблицу на стр. 79). Следовательно, написанное условие хотя и необходимо, но не достаточно для равновесия системы. Возьмем в той же плоскости другую произвольную точку В и определим сумму моментов всех сил системы относительно точки В. Если  , то это равенство вместе с предыдущим все же не может быть достаточным условием равновесия системы, поскольку равнодействующая системы (если она существует) может проходить через обе эти точки, тогда моменты равнодействующей относительно каждой из этих точек, а следовательно, и суммы моментов составляющих (теорема Вариньона) равны нулю, но система не в равновесии, а приводится к равнодействующей, проходящей через точки А и В.
, то это равенство вместе с предыдущим все же не может быть достаточным условием равновесия системы, поскольку равнодействующая системы (если она существует) может проходить через обе эти точки, тогда моменты равнодействующей относительно каждой из этих точек, а следовательно, и суммы моментов составляющих (теорема Вариньона) равны нулю, но система не в равновесии, а приводится к равнодействующей, проходящей через точки А и В.
Возьмем сумму моментов всех сил относительно третьей точки, выбрав эту точку C где-либо не на прямой АВ. Если сумма моментов всех сил системы относительно точки C равна нулю, то система находится в равновесии, так как равнодействующая не может проходить через точки А, В и С, не лежащие на одной прямой. Следовательно, три равенства
 (34)
(34)
выражают, так же как и равенства (33), необходимые и достаточные условия равновесия системы сил, произвольно расположенных на плоскости.
Если равенства (34) являются уравнениями равновесия, т. е. содержат неизвестные величины, которые нужно определить, то соответствующим выбором центров моментов A, B и C можно составить уравнения так, чтобы каждое из них содержало только одну неизвестную величину, и вместо системы трех уравнений с тремя неизвестными получить три уравнения, каждое из которых содержит только по одной неизвестной.
Задача №5
Однородный стержень длиной 2l и весом P прикреплен в точке В при помощи шарнира к стене (рис. 55), а в точке D опирается на угол другой стены. Найти все реакции, если известно, что точка D отстоит от первой стены на расстоянии а и находится на высоте b над шарниром В.
Решение. Равновесие какого тела надо рассматривать? Ответ на этот вопрос в данной задаче очевиден: равновесие стержня. Какие силы действуют на это тело? На него действуют вес Р, приложенный в середине стержня; реакция RD в точке D, направленная перпендикулярно виртуальному перемещению, т. е. перпендикулярно стержню; реакция в шарнире В, которую мы раскладываем на две составляющие XB н YB, поскольку направление реакции в шарнире обычно бывает неизвестно, хотя в данном случае это направление можно было бы определить по необходимому условию равновесия трех непараллельных сил . Теперь составляем уравнения равновесия, для чего воспользуемся равенствами (34).
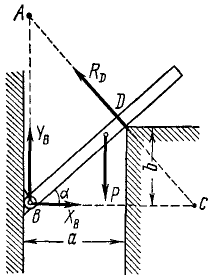
Рис. 55
За центры моментов выберем точки пересечения линий действия искомых сил Эти точки обычно называют точками Риттера. Уравнения равновесия принимают вид:



Остается решить эти уравнения, содержащие по одной неизвестной.
Для равновесия плоской системы сил необходимо и достаточно, чтобы равнялись нулю суммы моментов всех сил относительно двух каких-либо точек плоскости и сумма проекций всех сил на любую ось, не перпендикулярную к прямой, проходящей через эти две точки:
Третья форма уравнений равновесия
Если две из неизвестных сил параллельны друг другу и точка пересечения их, следовательно, уходит в бесконечность, то для решения задачи удобно воспользоваться третьим видом уравнений равновесия. Пусть суммы моментов плоской системы сил относительно произвольно выбранных точек А и В равняются нулю: 
В таком случае, как только что было показано, система сил или находится в равновесии, или приводится к равнодействующей, проходящей через точки А и В. Спроецируем все силы на какую-либо ось, не перпендикулярную к прямой, проходящей через точки А и В. Если система сил . приводится к равнодействующей, лежащей на прямой АВ, то сумма проекций всех сил на g выбранную нами ось должна равняться модулю | этой равнодействующей, помноженному на коси- | нус утла между осью и прямой АВ. Если же система находится в равновесии, то сумма проекций всех сил равняется нулю. Обратно, если сумма | проекций всех сил на эту ось равна нулю, то, следовательно, равна нулю равнодействующая, т. е. эта система находится в равновесии.
Таким образом, для равновесия системы сил, расположенных на плоскости, необходимо и достаточно, чтобы равнялись нулю суммы моментов всех сил системы относительно двух произвольно
выбранных точек плоскости и сумма проекций всех сил системы на какую-либо ось Ох, не перпендикулярную к прямой, проходящей через выбранные центры моментов:
 (35)
(35)
Задача №6
Между двумя вертикальными стенами, находящимися на расстоянии а друг от друга (рис. 56), помещен стержень весом P и длиной 21, который может вращаться вокруг шарнира А. прикрепляющего конец его к одной из стен. Найти реакции опор.
Решение. 1. Равновесие какого тела надо рассмотреть? Равновесие стержня.
2. Какие силы на это тело действуют? Вес Р; реакция в точке D, направленная перпендикулярно виртуальному перемещению стержня (стержень, не нарушая связи, можно перемещать вдоль стены, поэтому реакция Rq направлена перпендикулярно стене DC); реакция в шарнире А, которую мы разложим на XА и YА.
3. Составим уравнения равновесия в третьей форме, выбрав за центры моментов точки А и В, в которых пересекаются линии действия искомых реакций. Точка пересечения Rq и Xa находится в бесконечности, поэтому в качестве третьего уравнения возьмем сумму проекций всех сил на какую-либо ось, лишь бы эта ось не была перпендикулярна к АВ. Имеем
Определив из чертежа sin а и cos а и решая эти уравнения, содержащие по одной неизвестной, найдем ответ. 
Для равновесия плоской системы параллельных сил необходимо и достаточно, чтобы равнялись нулю суммы проекций всех сил на какую-либо ось, не перпендикулярную линиям действия сил, и сумма моментов относительно какой-либо точки: 
Условия равновесия плоской системы параллельных сил
Если все силы системы параллельны друг другу, то одно из трех уравнений становится следствием двух Других.
В самом деле, в этом случае линия действия главного вектора (если он не равен нулю) параллельна линиям действия всех сил и для его определения достаточно взять сумму проекций всех сил на ось, параллельную их лилиям действия. Если сумма проекций всех сил равна нулю, то и главный вектор равен нулю. Если же, кроме того, равен нулю и главный момент, то система находится в равновесии. Справедливо и обратное заключение: если система параллельных сил, расположенных на плоскости, находится в равновесии, то равняются нулю сумма проекций сил на любую ось и сумма моментов сил относительной любой точки плоскости:
 (36)
(36)
Ось Ox может быть и не параллельной линиям действия сил, а составлять с ними какой-либо угол, кроме прямого.
Для равновесия плоской системы параллельных сил необходимо и достаточно, чтобы равнялись нулю суммы моментов всех сил относительно двух точек плоскости, не лежащих на прямой, параллельной линиям действия сил: 
Пусть дана система сил, расположенных в одной плоскости и параллельных друг другу. Возьмем на этой плоскости произвольную точку А. Если  , то система может либо находиться в равновесии, либо быть приведенной к равнодействующей, проходящей через точку А параллельно линиям действия составляющих сил. Возьмем сумму моментов всех сил относительно какой-либо точки В, выбрав эту точку так, чтобы прямая AB не была параллельна силам системы. Если сумма моментов относительно этой точки равна нулю, то система находится в равновесии, потому что равнодействующая не может проходить через точки А и В, так как должна быть параллельной силам системы. Поэтому равенства
, то система может либо находиться в равновесии, либо быть приведенной к равнодействующей, проходящей через точку А параллельно линиям действия составляющих сил. Возьмем сумму моментов всех сил относительно какой-либо точки В, выбрав эту точку так, чтобы прямая AB не была параллельна силам системы. Если сумма моментов относительно этой точки равна нулю, то система находится в равновесии, потому что равнодействующая не может проходить через точки А и В, так как должна быть параллельной силам системы. Поэтому равенства
 (37)
(37)
являются необходимыми и достаточными условиями равновесия плоской системы параллельных сил.
Задача №7
На двухконсольную горизонтальную балку действует пара сил (PP), на левую консоль —равномерно распределенная нагрузка интенсивности р, а в точке D правой консоли — вертикальная нагрузка Q. Определить реакции опор, если P=1Т, Q=2Т, p=2T∕м, а =0,8 м (рис. 57).
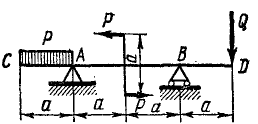
Рис. 57
Решение. Иногда (как в данной задаче), кроме сил, действующих на тело, имеется пара, заданная моментом. Силы пары равны и противоположны, поэтому пара сил не входит в уравнения проекций, но входит в уравнения моментов.
Рассмотрим равновесие балки CD. На балку действуют: 1) пара сил (PP) с моментом +P∙a= 0,8 T∙m∙, 2) вертикальная сосредоточенная нагрузка Q = 2T, приложенная в точке О; 3) равномерно распределенная нагрузка, которую заменяем одной вертикальной силой (равнодействующей) p∙α=1,6T, приложенной в середине CA; 4) реакция RВ в подвижной опоре В, направленная перпендикулярно виртуальным перемещениям, т. е. вертикально; 5) реакция RА в неподвижном шарнире А. Направление реакции в неподвижном шарнире, вообще говоря, неизвестно. Если повернем пару, изображенную на чертеже, на 90°, отчего, как известно, действие пары на балку не изменится, то все силы, действующие на балку, станут вертикальными, следовательно, и реакция RА вертикальна. Для решения задачи составим уравнение равновесия в форме (36):

Пара сил в это уравнение не входит, но обязательно должна войти в уравнение моментов: 

Решая совместно два этих уравнения, получим ответ.
Можно воспользоваться также и уравнениями (37). Тогда вместо уравнения проекций надо составить второе уравнение моментов: 

Решая первое уравнение, найдем RВ, решая второе, найдем RА.
Ответ. RА=1,5Т, RВ = 2,1Т.
Задача №8
Балка AB длиной 4 м, весом 200 кГ может вращаться вокруг горизонтальной оси А и опирается концом В на другую балку CD длиной 3 м, весом 160 кГ, которая подперта в точκe E и соединена со стеной шарниром D. В точках M и N помещены грузы по 80кГ каждый. Расстояния: AM=3м, ED = 2м, ND=1м. Определить опорные реакции (рис. 58, а).
Решение. Балки AB и CD не являются одним твердым телом, а представляют собой систему сочлененных тел. Рассмотрим отдельно равновесие каждого тела под действием всех приложенных к этому телу сил.
1-й вопрос: равновесие какого тела рассматривать?
Ответ: равновесие балки АВ.
2-й вопрос: какие силы действуют на это тело?
Ответ: на балку AB действуют (рис. 58, б): 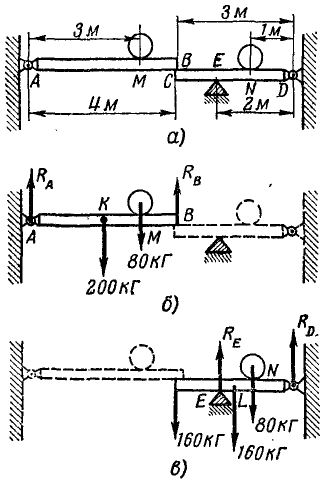
Рис. 58
а) собственный вес балки 200 кГ, приложенный к середине балки н направленный по вертикали вниз;
б) вес 80кГ груза М, направленный по вертикали вниз;
в) реакция RВ со стороны балки CD, поддерживающей балку АВ. Эта реакция приложена к балке AB в точке В и направлена по вертикали вверх;
г) реакция RА в шарнире А. Эта реакция вертикальна, так как балка находится в равновесии, а все остальные действующие на балку силы направлены по вертикали. Нетрудно сообразить, что RА направлена вверх.
Уравнения равновесия можно составить в форме (36) или в форме (37) по нашему желанию. Составим их в форме (37), приравняв нулю суммы моментов относительно точки А и относительно точки В:

Решая эти уравнения, находим RА= 120 кГ, RВ = 160 кГ.
Теперь приступаем ко второй части задачи и опять задаем себе тот же вопрос: равновесие какого тела рассматривать? На этот раз рассмотрим равновесие балки CD. Какие силы на нее действуют? На нее действуют (рис. 58, в):
а) собственный вес балки 160 кГ, приложенный в середине балки;
б) вес 80 кГ груза N, приложенный между опорами E и D;
в) давление балки АВ, приложенное к балке CD в точке С, направленное по вертикали вниз и (по закону равенства действия и противодействия) равное реакции RВ, а следовательно, равное 160 кГ;
г) реакция RЕ, прило/кенная в точке E и направленная вверх;
д) реакция RD. Эта реакция должна быть вертикальной, так как вертикальны все остальные действующие на балку силы, а балка находится в равновесии. Однако трудно сказать (без предварительных вычислений), направлена ли эта реакция вверх или вниз. При составлении уравнений равновесия примем условно, что RD направлена вверх, но если в результате решения уравнений мы получим отрицательную величину реакции RD, то это будет означать, что мы реакцию направили неверно, и тогда изменим ее направление на обратное. При правильном направлении сил значения их из уравнений равновесия должны всегда получаться положительными.
Возьмем сумму проекций всех сил на вертикальную ось и сумму моментов всех сил относительно точки D:

Решая эти уравнения, находим ответ.
Ответ. RА= 120 кГ, RВ =160 кГ, RЕ= 400 кГ, RD = 0.
Статически определенной задачей называют задачу о равновесии, в которой число неизвестных равно числу уравнений равновесия
Итак, имеется только два уравнения равновесия системы параллельных сил, расположенных в одной плоскости, вместо трех уравнений равновесия системы сил, расположенных на плоскости произвольно. Равновесие плоского пучка сил определяется двумя уравнениями, если же силы пучка не лежат в одной плоскости, то появляется третье уравнение равновесия, как это показано в гл. III.
В системе уравнений число неизвестных не должно превышать числа уравнений, иначе система уравнений не имеет однозначных решений.
Статически определенными задачами называют задачи о равновесии твердого тела, в которых число неизвестных равно числу уравнений равновесия. В противном случае задачи не могут быть решены методами статики и являются статически неопределенными.
Равновесием системы тел называют такое состояние, при котором каждое из тел находится в равновесии
Равновесие системы сил. Часто встречается необходимость в статическом расчете системы тел, так или иначе соединенных («сочлененных») между собой.
Силы, действующие на тела такой системы, можно подразделить на две категории: внешние — силы, приложенные к телам данной системы, но обусловленные наличием других тел, не входящих в эту систему, и внутренние — силы взаимодействия между телами одной и той же системы. Такое подразделение относится как к активным силам, так и к реакциям связей.
Если система находится в равновесии, то в равновесии находится каждое тело, входящее в состав этой системы. Мы можем рассматривать каждое тело отдельно от других тел системы и составить уравнения равновесия всех сил, приложенных к этому телу, не исключая и сил, обусловленных действием на это тело соседних тел системы, т. е. внутренних сил системы, приложенных к этому телу. Так было сделано, например, при решении задачи № 22 о равновесии двух балок.
Вместе с тем, пользуясь аксиомой затвердения, мы можем всю систему рассматривать как одно абсолютно твердое тело и составить уравнения равновесия всех внешних сил системы. Внутренние же силы в эти уравнения равновесия всей системы не входят, так как они взаимно уравновешиваются по принципу равенства действия и противодействия, поскольку взаимодействия каждых двух тел «затвердевшей» системы оказываются приложенными к частям одного абсолютно твердого тела.
Задача №9
На невесомую трехшарнирную арку ABC (рис. 59, а)
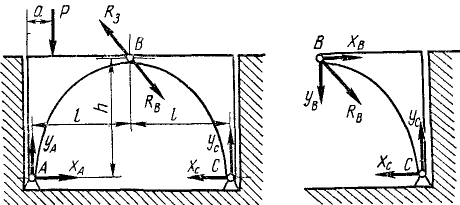
Рис. 59
действует вертикальная сила Р. Определить реакции шарниров А, В и С. Размеры указаны на чертеже.
Решение. Конструкция состоит из двух полуарок AB и ВС, сочлененных шарниром В. Собственным весом полуарок пренебрегаем, поэтому на арку ABC действуют следующие внешние силы: вертикальная сила P и реакции в шарнирах А и С.
Между полуарками имеется взаимодействие в точке В их сочленения. Одна нз этих внутренних сил системы приложена к полуарке АВ, другая равна ей по величине, обратна по направлению, но приложена к полуарке ВС. Если всю арку рассматривать как твердое тело, то эти две силы учитывать не надо, так как они оказываются приложенными к одному твердому телу и, следовательно, взаимно уравновешивают друг друга. В уравнения равновесия всей арки войдут только внешние силы системы: 

Имеем три уравнения с четырьмя неизвестными.
Для определения горизонтальной реакции в шарнире С, а также RВ, рассмотрим равновесие всех сил, действующих на полуарку ВС. На эту полуарку действуют (рис. 59, б): реакции XС и YС в шарнире C (внешние реакции системы) и реакция в шарнире В (внутренняя реакция для всей системы, но внешняя для полуарки ВС) со стороны полуарки АВ. Эту реакцию мы тоже разложим по осям координат на XВ и YВ- Составим уравнения равновесия для полуарки ВС: 
Мы получили три уравнения, содержащие четыре неизвестных, но две из этих неизвестных входят также и в предыдущие три уравнения. Всего мы имеем шесть уравнений с шестью неизвестными. Решая уравнения, получим ответ.
Ответ. 

Жесткая заделка
Задачи на тему: жёсткая заделка
Задача №10
Брус, вес которого Р= 100 кГ, приложен в точке С, жестко заделан в стену, образуя с ней угол а =60° (рис. 60, а). Внутри угла DAВ лежит цилиндр весом Q = 180 кГ, касающийся бруса в точке Е, причем АЕ=0,3 м и AC = 0,4 м. Определить реакцию заделки.
Решение. Если балка заделана в стену, то на заделанный конец балки действует система распределенных сил (реакций). Приведем их по методу Пуансо к точке А, заменим одной неизвестной реакцией заделки (с проекциями XА и YА) и одним неизвестным моментом заделки М. Эти три неизвестные определим из уравнений равновесия сил, действующих па балку.
Чтобы определить реакцию заделки (XА, YА и М), надо составить три уравнения равновесия сил, действующих на брус, и, решив их, найти три неизвестные величины. Однако среди сил, действующих на брус, имеется еще одна неизвестная (четвертая)—сила давления F цилиндра, приложенная к брусу в точке Е.
Для определения этой силы предварительно рассмотрим равновесие цилиндра (рис. 60, б), на который действуют вес Q = 180 кГ, реакция R’ стены, направленная горизонтально вправо (перпендикулярно виртуальным перемещениям цилиндра вдоль стены), и реакция R» бруса, направленная влево вверх, перпендикулярно брусу (перпендикулярно виртуальным перемещениям цилиндра по брусу). По принципу равенства действия и противодействия эта реакция R» по величине равна, а по направлению противоположна силе F давления цилиндра на брус.
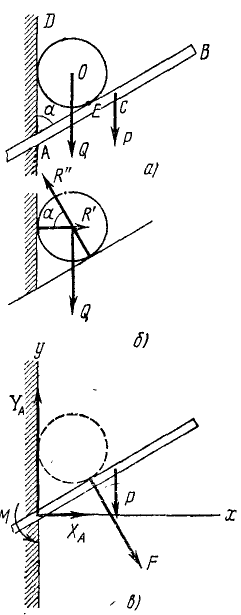
Рис. 60
Из системы сил, действующих на цилиндр, надо определить лишь одну (R» ), а потому достаточно одного уравнения равновесия, если составить его так, чтобы в него не входила другая неизвестная (R»)> Таким уравнением может быть уравнение  относительно какой-либо точки, лежащей на линии действия R’ (кроме точки 0), или
относительно какой-либо точки, лежащей на линии действия R’ (кроме точки 0), или  . Сумма проекций на вертикальную ось всех сил, приложенных к цилиндру, имеет вид
. Сумма проекций на вертикальную ось всех сил, приложенных к цилиндру, имеет вид

откуда 
Сила F давления цилиндра на брусок равна  , но направлена в противоположную сторону (рис. 60, в).
, но направлена в противоположную сторону (рис. 60, в).
Кроме силы F, на брусок действуют его вес Р = 100 кГ и реакция в заделке, которую мы представили проекциями XА и YА, а также моментом М.
Уравнения проекций и моментов всех сил, приложенных к бруску, напишем, приняв за центр моментов точку А:

Решая эти уравнения, находим неизвестные величины.
Ответ. XА =—103,8 кГ; YА = +280 кГ . M = +96,9 кГ . м.
Знак минус перед реакцией XA показывает, что направление реакции противоположно принятому на рис. 60, в. Это и очевидно, так как давление цилиндра стремится выдернуть брусок из заделки.
Определение внутренних усилий в стержнях фермы
Задачи на тему: Определение внутренних усилий в стержнях фермы
Задача №11
Определить опорные реакции и усилия в стержнях фермы крана (рис. 61, а) при нагрузке G = 8 Т. Весом стержней пренебречь.
Решение. В задаче требуется определить опорные реакции и внутренние усилия в стержнях фермы. Под фермой понимают жесткое сооружение, состоящее из стержней, соединенных шарнирами.
Для определения опорных реакций рассмотрим равновесие крана. На кран действуют три внешние силы: 1) вес груза G = 8T; 2) реакция R2 в опоре O2, направленная вертикально вверх, перпендикулярно виртуальным перемещениям, и 3) реакция R1 в шарнире O1. Реакции в шарнирах мы обычно раскладывали по координатным осям и определяли проекции из уравнений равновесия. Очевидно, что в данном случае проекция R1 на горизонтальную ось равна нулю, потому что все остальные действующие на кран внешние силы вертикальны, следовательно, вертикальна и реакция R1. Эта реакция направлена вниз, так как груз стремится повернуть кран вокруг опоры O2.
Определим плечо силы G относительно O2. Треугольник O1AO2 равносторонний и AO2 = 3 л. В прямоугольном треугольнике ABO2 катет AO2 равен половине гипотенузы, следовательно, угол AO2В = 60°. Таков же угол, составляемый BO2 с горизонтальной прямой, и искомое расстояние h = 6 cos 60° = 3. Итак, 
откуда 
Переходим к определению внутренних усилий в стержнях фермы. Как уже было сказано (см. задачу № 8), усилием в стержне называют силу, действующую вдоль стержня, растягивающую или сжимающую его; если стержень растянут, то на шарнир действует сила, направленная к стержню, а если сжат, то от него. В уравнения равновесия, выводимые в статике твердого тела, входят только внешние силы, потому что внутренние силы согласно принципу равенства действия и противодействия попарно равны и противоположны.
Для определения внутренних усилий в стержнях фермы надо рассмотреть равновесие не всей фермы, а лишь части ее, мысленно разрезав ферму, отбросив одну из отрезанных частей и заменив отброшенную часть силами, направленными вдоль разрезанных стержней. Этот метод определения внутренних усилий 1 называют методом РОЗ по первым буквам слов, определяющих те операции, которые надо проделать (разрежем, отбросим, заменим).
Итак, для определения внутренних усилий в стержнях фермы надо сначала определить реакции, а потом:
1) разрежем мысленно ферму на две части, но так, чтобы разрезано было не более трех стержней с неизвестными усилиями, потому что мы имеем всего три уравнения равновесия. При этом нельзя разрезать ферму так, чтобы все три разрезанных стержня с неизвестными усилиями были между собой параллельны или же все три сходились в одной точке, потому что для этих случаев мы имеем всего по два уравнения. Например, если усилия в стержнях AO1, AO2 и AB неизвестны, то не следует мысленно отрезать узел А. Можно сначала отрезать узел В, определить усилие в стержне АВ, а затем уж отрезать узел А, тогда из двух уравнений равновесия сил, приложенных к шарниру А, определим усилия в стержнях AO1 и AO2. C этим ограничением можно не только разрезать ферму, но и вырезать из фермы отдельные шарниры. Разрежем ферму крана, как показано на чертеже (рис. 61, б);
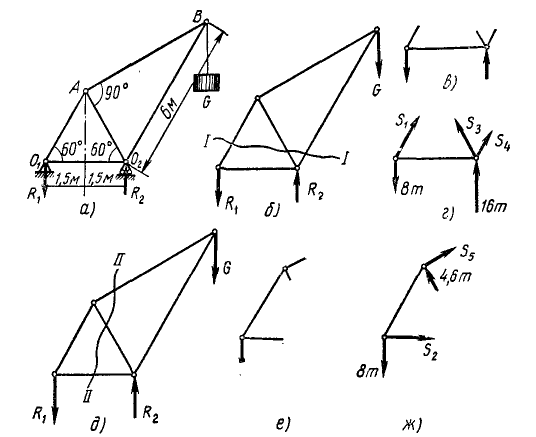
Рис. 61
2) отбросим мысленно одну из частей, на которые разрезана ферма. Принципиально говоря, безразлично, которую из частей отбросить. Отбросим верхнюю часть (рис. 61, в). В результате этих действий жесткость фермы нарушилась бы и, чтобы сохранить равновесие оставленной части фермы, необходимо к ней приложить внешние силы, в точности такие же, как внутренние усилия в соответствующих стержнях неразрезанной фермы. Поэтому мы
3) заменим отброшенную часть фермы неизвестными по величине силами, направив их по разрезанным стержням в сторону от оставленной части, т. е. наружу (рис. 61, г). Если среди разрезанных стержней имеются такие стержни, усилия в которых известны, то наружу мы их направляем только в том случае, если стержень растянут; когда стержень сжат, мы направляем вектор, изображающий это усилие внутрь, к шарниру. Эти силы, равные внутренним усилиям в стержнях, обозначают буквой S с индексом, соответствующим номеру стержня. Теперь составим уравнения равновесия оставленной части фермы. Здесь удобно применить третий вид (35) уравнений равновесия: 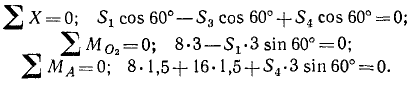
Решая эти уравнения, находим

Знаки минус при полученных из уравнений значениях усилий в третьем и в четвертом стержнях показывают, что направления сил на рис. 60, г нужно изменить на противоположные, так как эти стержни не растянуты, а сжаты.
Чтобы определить усилия в других стержнях, надо снова применить метод РОЗ, разрезав ферму по другим стержням;
4) разрежем ферму, как показано на чертеже (рис. 60,д);
5) отбросим одну часть, например правую (рис. 60, е);
6) заменим отброшенную часть силами, направленными по стержням.
Если усилие в стержне неизвестно, то условно считаем, что стержень растянут, и направляем силу от шарнира: S5 и S2 (рис. 60, ж). Если же усилие в разрезанном стержне уже известно, то направляем его от шарнира, когда стержень растянут, и к шарниру, когда стержень сжат (усилие в третьем стержне, равное 4,6 T на рис. 60, ж). Затем составляем и решаем уравнения равновесия:

Из этих двух уравнений находим S2 и S5.
Заметим, что ферму (и вообще всякую неизменяемую механическую систему) называют статически определимой, если внутренние усилия ее элементов при любой нагрузке могут быть найдены из уравнений статики. В противном случае систему называют статически неопределимой.
Силы трения
Максимальное значение силы трения скольжения равно произведению нормального давления и коэффициента трения: Fмaκc = fN
Кулоново трение
Трение материальных тел связано с явлениями не только механического, но и электрического, термического, внутримолекулярного и пр. характера, и изучение трения относится к области физики. Трудами советских и зарубежных ученых открыты законы и выведены формулы, определяющие силы трения. Точные формулы очень сложны, но в технике обычно пользуются для приближенного определения трения простыми соотношениями, установленными еще в XVIII в. Ш. Кулоном опытным путем. Для вывода закона трения по Кулону проделаем опыт, обычно называемый опытом Морена, по имени одного из основателей научной практической механики. Однако этот же опыт еще задолго до Морена проделал Amohtoh — один из первых серьезных исследователей трения.
К телу (рис. 62), лежащему на горизонтальной негладкой плоскости, прикреплена перекинутая через блок нить, к другому концу которой привязана чашка с грузом. На тело действуют следующие силы: вес G, реакция R плоскости, натяжение Q нити, равное весу груза, приложенного к концу нити, сила трения Fтр направленная против натяжения нити. Из условия равновесия тела следует, что при покое тела сила трения равна и противоположна той силе Q, которая стремится вывести это тело из состояния покоя.
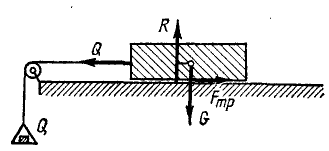
Рис. 62
Постепенно увеличивая груз Q, а следовательно, и натяжение нити, мы убедимся, что тело начнет двигаться, как только это натяжение достигнет определеной величины. До тех пор, пока натяжение нити меньше этой величины, оно уравновешивается силой трения, и тело находится в покое. Отсюда можно сделать заключение: при покое тела увеличение силы, стремящейся привести тело в движение, вызывает увеличение силы трения от нуля до известного предела Fмaκc, больше которого сила трения быть не может. Этот предел называют силой трения скольжения при начале движения:
 (38)
(38)
Как показывает опыт, максимальное значение силы трения пропорционально нормальному давлению:
 (39)
(39)
Под нормальным давлением мы понимаем составляющую полного давления, перпендикулярную к соприкасающимся плоскостям. Так, если тело веса G лежит на плоскости, составляющей угол а с плоскостью горизонта (см. рис. 63). то нормальное давление N = Gcos а.
Безразмерный коэффициент пропорциональности
называют статическим коэффициентом трения скольжения.
Сопоставляя равенства (38) и (39), находим, что во время покоя тела действующая на тело сила трения
 (38 / )
(38 / )
После начала движения коэффициент трения скольжения несколько уменьшается и принимает значение динамического коэффициента трения скольжения:

Согласно приближенным кулоновым законам трения коэффициенты трения скольжения не зависят ни от давления, ни от величины трущихся поверхностей, ни от скорости. Они зависят от физической природы трущихся тел, от шлифовки поверхностей, от расположения волокон и, конечно, от смазки. Числовые значения статического и динамического коэффициента трения имеются в любом техническом справочнике.
Статический коэффициент трения скольжения равен тангенсу угла трения.
Угол трения, тангенс трения, конус трения
Коэффициенты трения легко можно определить экспериментальным путем. Пусть тело (рис. 63) лежит на наклонной плоскости OA, угол наклона которой мы можем изменять по нашему желанию. На тело действуют три силы: вес G, сила трения скольжения Fтр, направленная вдоль плоскости соприкосновения тел, и реакция R плоскости, перпендикулярная к этой плоскости, по величине равная нормальному давлению N.
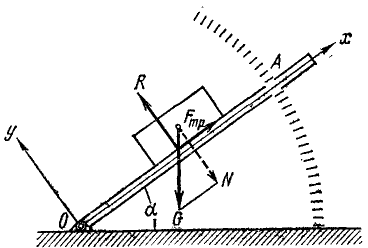
Рис. 63
Будем постепенно увеличивать угол наклона до тех пор, пока тело не начнет двигаться вниз по плоскости. Угол наклона плоскости, при котором начинается скольжение, называют углом трения αтр для данной пары трущихся материалов. Если, например, тело сделано из бронзы, а плоскость стальная, то αтр есть угол трения бронзы по стали.
Построим оси координат, как показана на чертеже, и составим уравнения равновесия:


Сравнивая это равенство с (39), находим, что статический коэффициент трения скольжения равен тангенсу угла трения. Тангенс угла трения иногда коротко называют тангенсом трения.
Реакцию, перпендикулярную к опорной поверхности (рис. 64, а), называют идеальной реакцией в отличие от полной реакции, выражающейся геометрической суммой идеальной реакции и силы трения.
Таким образом, сила трения является касательной составляющей полной реакции, идеальная реакция — нормальной составляющей полной реакции, а угол трения — углом максимального возможного отклонения полной реакции Pτp опорной поверхности от нормали к ней.
Если мы будем поворачивать силу P вокруг этой нормали, то также будут поворачиваться сила трения и полная реакция. При этом полная реакция опишет конус с осью, нормальной к поверхности соприкосновения тел, и с углом при вершине, равным удвоенному углу трения. Этот конус, называемый конусом трения, является геометрическим местом всевозможных направлений полной реакции Rтр.
Пусть к телу, лежащему на негладкой поверхности, весом которого можно пренебречь (рис. 64, б), приложена сила Р, составляющая угол β с нормалью к этой поверхности, как показано на чертеже. Убедимся, что сила P не может привести тело в движение, если угол β меньше угла трения αтр. Разложим силу P на две составляющие:

Составляющая P1 стремится привести тело в движение, a P2 давит на поверхность, вследствие чего возникает сила трения Fтр, направленная против составляющей P1. Движение тела под действием силы P произойдет лишь в том случае, если составляющая P1 будет больше максимально возможного значения силы трения:

или, принимая во внимание предыдущие равенства,

Деля обе части неравенства на P cos β, получим следующее необходимое условие движения тела:

В это условие не входит значение силы P и надо сделать такое заключение: если на тело, лежащее на негладкой плоскости, оказывает давление сила, линия действия которой лежит внутри конуса трения, то, сколь бы велика ни была такая сила, она не приведет тело в движение.
Этим правилом широко пользуются в технике, на нем построены теория клина, теория самоторможения и др.
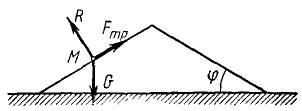
Рис. 65
Задача №12
Идеально сыпучее тело, лежащее на горизонтальной плоскости, принимает форму конуса. Определить угол наклона образующей к горизонтальной плоскости (угол естественного откоса).
Решение. Рассмотрим равновесие какой-либо частицы M (рис. 65), находящейся на поверхности конуса. На частицу действуют
1) вес G, направленный по вертикали вниз;
2) реакция/? соседних частиц сыпучего тела, направленная перпендикулярно возможному перемещению частицы и равная нормально му давлению частицы на поверхность конуса;
3) сила трения Fтр=fN, направленная по образующей вверх. Многоугольник (треугольник) сил, действующих на частицу, должен быть замкнут, так как она находится в равновесии и
Но коэффициент трения, как известно, равен тангенсу угла трения, следовательно, угол естественного откоса равен углу трения:

Угол естественного откоса, называемый также углом ската, имеет большое значение при проектировании различных насыпей, элеваторов, овощехранилищ и пр.
Задача №13
Сколько яровой пшеницы можно насыпать на круглую площадку диаметром 10 м, если вес 1 л яровой пшеницы равен 750 Г, а f =0,75?
Решение. Умножив насыпной вес яровой пшеницы 0,75 Т/м3 на объем конуса  , где φ—угол естественного откоса, получим ответ.
, где φ—угол естественного откоса, получим ответ.
Ответ. 98 T.
Задача №14
Лестница AB (рис. 66) прислонена к стене под углом 30°. По лестнице поднимается человек весом P. Пренебрегая весом лестницы, определить наибольшее расстояние ВС, на которое может подняться человек, не уронив лестницы, если коэффициент трения лестницы о пол и о стену f = tg 15°.
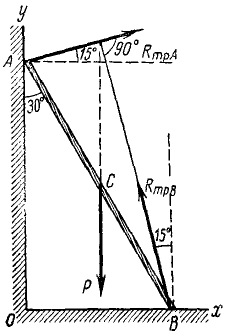
Рис. 66
Решение. Рассмотрим равновесие лестницы в предельном положении. На лестницу действуют: 1) вес P человека, приложенный в точке С; 2) полная реакция Rтр.А в точке А, направленная вправо н вверх под углом 90° —15° = 75° к стене, так как в предельном положении она составляет с идеальной реакцией угол, равный углу трения; 3) полная реакция Rтр.B в точке В, направленная вверх и влево под углом 75° к полу. Уравнения равновесия имеют вид:
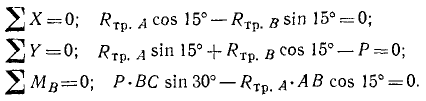
Определив Rтр.B из первого уравнения, подставим во второе:

Умножив это уравнение на sin 15°, найдем, что Rтр.А = P sin 15°, и, подставляя это значение в третье уравнение равновесия, получим

откуда 
Если человек поднимается по лестнице выше AB/2, то три силы, действующие на лестницу, не пересекутся в одной точке, и необходимое условие равновесия трех непараллельных сил (см. § 3) будет нарушено. Если же человек будет находиться на лестнице ниже, то равновесие сохранится, так как угол трения является максимальным углом, который может составлять полная реакция с идеальной реакцией. В этом случае сила трения будет меньше произведения коэффициента трения на нормальное давление, и три приложенные к лестнице силы пересекутся в одной точке.
Момент пары, противодействующей качению тела по опорной поверхности, называют моментом трения качения.
Трение качения
В различных задачах механики надо учитывать трение, возникающее при качении тел. Оно не может быть объяснено в механике абсолютно твердого тела, а потому мы коснемся его лишь в общих чертах.
Пусть перпендикулярно к оси цилиндрического катка (рис. 67) веса G и радиуса r, лежащего на негладкой горизонтальной поверхности, приложена горизонтальная сила  . Вследствие деформаций катка и опорной поверхности их касание происходит не в одной точке, а по некоторой площадке, и нормальная реакция
. Вследствие деформаций катка и опорной поверхности их касание происходит не в одной точке, а по некоторой площадке, и нормальная реакция  бывает смещена относительно вертикальной плоскости симметрии катка на некоторое расстояние δ. В направлении, обратном силе , в том месте, где каток касается опорной поверхности, возникает сила
бывает смещена относительно вертикальной плоскости симметрии катка на некоторое расстояние δ. В направлении, обратном силе , в том месте, где каток касается опорной поверхности, возникает сила  , которую называют силой трения качения. Во время равновесия катка эта сила по модулю равна F и составляет с ней пару
, которую называют силой трения качения. Во время равновесия катка эта сила по модулю равна F и составляет с ней пару  , уравновешиваемую парой (GR), момент которой называют моментом трения качения. Плечо δ этой пары при предельном равновесии называют коэффициентом трения качения. Отметим, что в отличие от безразмерного коэффициента трения скольжения коэффициент трения качения имеет размерность длины и его выражают в миллиметрах, поэтому оба эти коэффициента — величины несравнимые. Неправильно было бы считать, что трение качения всегда меньше, чем трение скольжения. Они зависят от свойства трущихся тел. Летом ездят на колесах, а зимой на санях.
, уравновешиваемую парой (GR), момент которой называют моментом трения качения. Плечо δ этой пары при предельном равновесии называют коэффициентом трения качения. Отметим, что в отличие от безразмерного коэффициента трения скольжения коэффициент трения качения имеет размерность длины и его выражают в миллиметрах, поэтому оба эти коэффициента — величины несравнимые. Неправильно было бы считать, что трение качения всегда меньше, чем трение скольжения. Они зависят от свойства трущихся тел. Летом ездят на колесах, а зимой на санях. 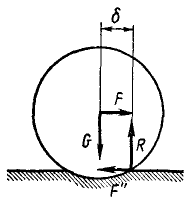
Рис. 67
Момент трения качения вполне это трение характеризует, но иногда бывает удобно пользоваться силой трения качения, величину которой
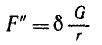 (40)
(40)
легко получить из равенств моментов двух пар.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Естественный и векторный способы определения движения точки
- Координатный способ определения движения точки
- Касательное и нормальное ускорения точки
- Основные законы динамики
- Условия равновесия системы сходящихся сил в аналитической форме
- Приведение двух параллельных сил к равнодействующей
- Пара сил в теоретической механике
- Приведение системы сил к данной точке
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Динамика твердого тела и системы. Все определения, законы и теоремы
Механическая система. Основные понятия
Свойства внутренних сил
Приводимые ниже свойства внутренних сил являются третьим законом Ньютона для системы материальных точек.
Свойство 1
Векторная сумма (главный вектор) всех внутренних сил системы равна нулю:
.
Свойство 2
Векторная сумма моментов всех внутренних сил системы, относительно произвольной точки O равена нулю:
.
Дифференциальные уравнения движения точек системы
Согласно второму закону Ньютона, дифференциальное уравнение движения материальной точки k массой mk , входящей в систему, имеет вид:
.
Спроектировав это уравнение на оси декартовой системы координат Oxyz , получим для каждой точки три уравнения:
.
Общие теоремы динамики механической системы
Общие теоремы динамики – это теорема о движении центра масс механической системы, теорема об изменении количества движения, теорема об изменении главного момента количества движения (кинетического момента) и теорема об изменении кинетической энергии механической системы.
Теорема о движении центра масс механической системы
Теорема о движении центра масс механической системы
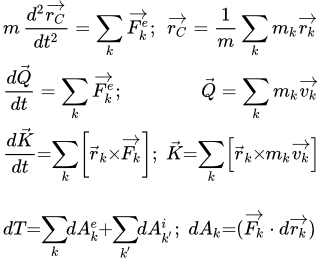
Произведение массы системы на ускорение ее центра масс равно векторной сумме всех действующих на систему внешних сил:
.
Здесь – масса системы; – ускорение центра масс системы: ;
– скорость центра масс системы: ;
– радиус вектор (координаты) центра масс системы: ;
– координаты и массы точек, из которых состоит система.
Теорема об изменении количества движения (импульса)
Теорема об изменении количества движения в дифференциальной форме
Производная по времени от количества движения (импульса) системы равна векторной сумме всех действующих на систему внешних сил:
.
Теорема об изменении количества движения в интегральной форме
Изменение количества движения (импульса) системы за некоторый промежуток времени равно сумме импульсов внешних сил за тот же промежуток времени:
.
Закон сохранения количества движения (импульса)
Если сумма всех внешних сил, действующих на систему, равна нулю, то вектор количества движения системы будет постоянным. То есть все его проекции на оси координат будут сохранять постоянные значения.
Если сумма проекций внешних сил на какую-либо ось равна нулю, то проекция количества движения системы на эту ось будет постоянной.
Тело переменной массы. Движение ракеты
Уравнение Мещерского
Дифференциальное уравнение движения точки переменной массы называется уравнением Мещерского:
.
Здесь – масса тела, которая является функцией от времени t ; – векторная сумма приложенных к телу внешних сил; – скорость отделяющихся частиц относительно тела.
Реактивная сила направлена в сторону, противоположную истечению отделяющихся частиц (топлива), и определяется по формуле:
,
где – расход топлива (кг/с).
Формула Циолковского
Скорость v движения ракеты под действием одной только реактивной силы определяется по формуле Циолковского:
.
Здесь – начальная скорость ракеты; u – скорость истечения реактивных газов относительно ракеты; – масса сгоревшего топлива; – масса корпуса ракеты с остатками топлива. Когда топливо выгорает полностью, то – это масса корпуса ракеты с полезной нагрузкой.
Отношение первоначальной массы ракеты (с полным запасом топлива) к массе корпуса ракеты называется числом Циолковского:
.
Для достижения первой космической скорости км/с , при , требуется, чтобы скорость истечения реактивных газов была не менее км/с . В современных жидкостных двигателях удается получить скорость истечения км/с . Поэтому, для достижения космических скоростей, ракеты должны быть многоступенчатыми.
Теорема об изменении главного момента количества движения (теорема моментов)
Теорема моментов в инерциальной системе координат
Главный момент количества движения (или кинетический момент) системы является характеристикой вращательного движения. Возьмем систему координат Oxyz с началом в точке O . Тогда , проекции кинетического момента системы на оси координат являются моментами количества движения системы относительно этих осей:
;
;
.
Если система состоит из нескольких частей, то главный момент количества движения системы равен сумме моментов количеств движения отдельных ее частей.
Теорема об изменении главного момента количества движения (теорема моментов)
Производная по времени от главного момента количества движения системы относительно некоторого неподвижного центра O равна сумме моментов всех внешних сил системы относительно того же центра:
(М2) .
Выпишем компоненты уравнения (М2) в неподвижной системе координат Oxyz :
;
;
.
Закон сохранения главного момента количества движения (момента импульса)
Если сумма моментов всех приложенных к системе внешних сил относительно данного неподвижного центра O равна нулю, то главный момент количества движения системы относительно этого центра будет постоянным. То есть все его проекции на оси координат будут сохранять постоянные значения:
.
Часто встречаются случаи, когда система вращается вокруг неподвижной оси. Тогда нужно спроектировать векторное уравнение (М2) на направление этой оси. В результате получим теорему моментов, применительно к вращению относительно оси.
Производная по времени от кинетического момента системы относительно некоторой неподвижной оси равна сумме моментов всех внешних сил системы относительно этой оси. Если сумма моментов всех приложенных к системе внешних сил относительно некоторой неподвижной оси равна нулю, то кинетический момент системы относительно этой оси будет постоянным.
Теорема моментов в системе координат, связанной с центром масс
Кинетический момент системы относительно неподвижного центра удобно использовать в тех задачах, в которых система имеет одну или несколько закрепленных точек. Например при вращении тела или системы тел вокруг точки или оси. Когда таких точек нет, то наиболее удобным в использовании является кинетический момент относительно центра масс в системе координат, в которой центр масс покоится, а оси остаются параллельными осям инерциальной системы отсчета. В общем случае, система отсчета, связанная с центром масс, не является инерциальной, но она не вращается относительно инерциальной системы отсчета.
Главным моментом количества движения системы относительно ее центра масс C называется величина , равная векторной сумме моментов количеств движения всех точек системы относительно центра масс в системе отсчета, в которой центр масс покоится, а оси системы координат параллельны осям инерциальной системы координат:
(М3) .
Здесь – скорости точек системы и скорость ее центра масс в инерциальной системе отсчета. Тогда – скорость точки массой в системе отсчета, связанной с центром масс.
Связь кинетических моментов в различных системах отсчета
Кинетический момент системы относительно неподвижной точки O равен сумме кинетического момента центра масс C , если в нем сосредоточить всю массу системы, и кинетического момента системы относительно центра масс :
(М4) .
То есть можно сказать, что вращение системы вокруг неподвижной точки O складывается из вращения центра масс C вокруг точки O , и вращения элементов системы вокруг центра масс C .
В (М2) ⇑ мы использовали кинетический момент системы, вычисляемый относительно произвольной неподвижной точки в инерциальной системе отсчета. Уравнения для кинетического момента имеют тот же вид, если в качестве полюса взять центр масс C системы.
Теорема моментов относительно центра масс системы
Производная по времени от главного момента количества движения системы относительно ее центра масс C , равна сумме моментов всех внешних сил системы относительно того же центра:
(М5) .
В (М5) мы используем неинерциальную систему координат, начало которой, в течении всего движения системы, находится в центре масс, а оси параллельны осям инерциальной системы координат. Естественно, что если мы выберем инерциальную систему координат, начало которой в данный момент времени совпадает с центром масс, то теорема моментов не изменит своего вида (М5). То есть центр масс обладает такой особенностью, что теорема моментов относительно него имеет одну и ту же форму, как в инерциальной системе отсчета, так и в неинерциальной системе, начало которой на всем протяжении движения совпадает с центром масс, а оси параллельны осям инерциальной системы отсчета. Такая особенность возникает только для центра масс системы. Для других точек, уравнение моментов в неинерциальной системе отсчета не имеет вида (М5).
Кинетический момент твердого тела
Пусть твердое тело вращается с угловой скоростью ω вокруг неподвижной оси Oz . Тогда его кинетический момент относительно этой оси равен произведению момента инерции относительно этой оси на угловую скорость вращения:
.
Если на твердое тело действуют внешние силы, то применяя теорему моментов, находим:
.
Если момент сил относительно оси Oz равен нулю: , то угловая скорость постоянна: .
В произвольном случае, кинетический момент выражается через компоненты угловой скорости и тензора инерции. Пусть, в данный момент времени, скорость точки O тела равна нулю: . То есть точка O является мгновенным центром вращения тела. Тогда компоненты кинетического момента тела относительно точки O определяется по формуле:
.
Здесь – компоненты тензора инерции тела ⇑ относительно точки O . Они связаны с моментами инерции формулами ⇑. Также подразумевается, что индексы p, q принимают значения x, y, z :
.
Здесь мы выбрали в качестве полюса неподвижную (в рассматриваемый момент времени) точку. Если, в качестве полюса выбрать центр масс тела, то компоненты момента импульса определяются по аналогичной формуле:
.
Для других точек, момент импульса выражается через угловую скорость более сложным образом.
В большинстве случаев, наиболее удобным полюсом оказывается центр масс C тела. Тогда, для компонент кинетического момента относительно произвольного центра O , имеем:
.
Здесь – радиус-вектор, проведенный из точки O в точку центра масс C ; m – масса тела; – скорость центра масс; – компоненты тензора инерции относительно точки C . Как видно, первое слагаемое является кинетическим моментом материальной точки, находящейся в центре масс тела и движущейся со скоростью центра масс. Второе слагаемое является вкладом вращения тела относительно его центра масс. То есть, как было указано выше ⇑, кинетический момент твердого тела относительно произвольной неподвижной точки O равен сумме кинетического момента поступательного движения центра масс относительно точки O и кинетического момента вращательного движения тела относительно его центра масс.
Теорема об изменении кинетической энергии
Кинетической энергия системы
Если система состоит из нескольких тел, то кинетическая энергия системы равна сумме кинетических энергий тел, составляющих систему.
Теорема Кенига
Кинетическая энергия системы равна сумме кинетической энергии центра масс C системы, масса m которого равна массе всей системы: , и кинетической энергии этой системы в ее движении относительно центра масс:
.
Здесь – скорость движения центра масс.
Если тело массы m совершает поступательное движение со скоростью , то скорости всех его точек равны . Кинетическая энергия поступательного движения:
(К1) .
Если тело вращается с угловой скоростью ω вокруг неподвижной оси Oz , то кинетическая энергия вращательного движения определяется по формуле:
(К2) ,
где – момент инерции тела относительно оси вращения.
В произвольном случае, кинетическая энергия равна сумме кинетической энергии поступательного движения центра масс и энергии вращательного движения относительно центра масс:
(К3) .
Здесь ω – абсолютное значение угловой скорости вращения тела; CL – ось, проведенная через центр масс, параллельно направлению вектора угловой скорости; – момент инерции относительно оси CL . Направление оси вращения может меняться со временем. Указанная формула дает мгновенное значение кинетической энергии.
Формула (К3) удобна, если тело вращается вокруг неподвижной оси. Если же вектор угловой скорости может менять направление относительно тела, то нам пришлось бы вычислять момент инерции относительно каждого положения оси вращения. В этом случае удобно выразить кинетическую энергию вращения через компоненты тензора инерции относительно центра масс тела:
(К4) .
Работа сил и мощность
Все сказанное в отношении работы и потенциальной энергии в разделе «Динамика материальной точки», имеет место и для динамики системы тел.
См. Работа силы. Мощность Силовые поля и потенциальная энергия
Единственное отличие заключается в том, что там силы приложены только к одной исследуемой точке. Для системы, внешние силы могут быть приложены к разным точкам, составляющих систему. При этом одна сила приложена только к одной точке, но этих сил может быть много. Точку, к которой приложена сила называют точкой приложения силы.
При рассмотрении твердых тел, мы можем упростить реальную систему сил, воспользовавшись результатами статики. Для этого нужно преобразовать сложную систему реальных сил на эквивалентную ей, более простую, систему. Так например, систему сил тяжести, действующих на каждую точку тела, можно заменить одной равнодействующей силой, приложенной к центру масс тела. Тогда все вычисления можно выполнять только для одной силы с точкой приложения в центре масс тела.
Работа при перемещении точки
Элементарная работа , которую совершает сила , при элементарном перемещении ее точки приложения, равна скалярному произведению векторов силы и перемещения:
;
.
То есть она равна произведению модуля вектора силы , перемещения и косинусу угла между ними. Это, в свою очередь, равно произведению касательной компоненты силы к траектории движения, и модуля элементарного перемещения . Здесь – скорость точки приложения силы; – промежуток времени, в течении которого происходит перемещение.
Мощность равна скалярному произведению векторов силы и скорости:
.
Работа , которую совершает сила , при перемещении точки ее приложения из точки в точку , равна сумме (интегралу) элементарных работ:
.
Работа при движении тела
Если тело движется поступательно, то скорости и перемещения всех его точек равны. В этом случае, работа и мощность вычисляются также как и при перемещении точки. Этот случай рассмотрен выше.
Для тела, вращающегося вокруг неподвижной оси Oz , элементарная работа равна произведению момента силы относительно этой оси на элементарный угол поворота dφ :
.
Здесь – мгновенное значение угловой скорости вращения; dt – время, в течении которого происходит поворот на угол dφ .
Мощность равна произведению момента силы на угловую скорость:
.
Для тела, вращающегося вокруг неподвижной точки O , элементарная работа равна скалярному произведению вектора момента силы относительно этой точки на вектор элементарного угла поворота :
.
Вектор элементарного поворота направлен вдоль вектора мгновенной угловой скорости : .
Мощность равна скалярному произведению векторов момента силы и угловой скорости:
.
При произвольном движении твердого тела, мы, произвольным образом, выбираем точку O , связанную с телом, которую называем полюсом. Тогда элементарная работа равна работе, которую совершает сила при перемещении полюса , и работе момента силы относительно полюса при элементарном повороте тела:
.
Заметим, что элементарный угол поворота и угловая скорость вращения не зависят от выбора полюса.
Мощность:
.
Теорема об изменении кинетической энергии системы
Теорема об изменении кинетической энергии системы в дифференциальной форме.
Дифференциал (приращение) кинетической энергии системы при некотором ее перемещении равно сумме дифференциалов работ на этом перемещении всех приложенных к системе внешних и внутренних сил:
.
Теорема об изменении кинетической энергии системы в интегральной форме.
Изменение кинетической энергии системы при некотором ее перемещении равно сумме работ на этом перемещении всех приложенных к системе внешних и внутренних сил:
.
Неизменяемая система – это механическая система, в которой расстояние между любыми двумя взаимодействующими точками остается постоянным во все время движения.
Идеальные связи – это связи, для которых сумма элементарных работ их реакций на любом возможном перемещении системы равна нулю.
Для систем с идеальными связями и неизменяемых систем, сумма работ внутренних сил равна нулю: . Для таких систем, изменение кинетической энергии системы равно сумме работ всех внешних сил, приложенных к системе:
.
Коэффициент полезного действия
В машинах и механизмах, совершающих некоторую полезную работу, силы можно разделить на следующие виды.
Движущие силы – это силы, совершающие положительную работу Aзатр .
Силы полезного сопротивления – это силы, совершающие отрицательную работу – Aпол. сопр , но выполняют полезное действие.
Силы вредного сопротивления – это силы, совершающие отрицательную работу – Aвр. сопр , и не выполняющие полезных действий.
Попеременные силы – это силы, совершающие то положительную, то отрицательную работу, но за достаточно большой промежуток времени, их сумма работ равна нулю. Механический коэффициент полезного действия машины – это величина, равная отношению работы полезных сил сопротивления (полезной работы) к работе движущих сил (затраченной на приведение машины в движение):
.
Пусть Nмаш – полезная мощность машины; Nдв – мощность двигателя. Тогда
.
Закон сохранения полной механической энергии
Если система движется под действием потенциальных сил, то сумма кинетической T и потенциальной Π энергий сохраняет постоянное значение:
.
Механическая энергия – это сумма кинетической и потенциальной энергии.
Уменьшение механической энергии, как правило, связано с ее превращением в тепловую, электрическую, электромагнитную энергию, энергию звука и электромагнитных колебаний (свет, электромагнитные волны). Увеличение механической энергии связано с обратными процессами превращения различных видов энергии в механическую.
Геометрия масс
Моменты и тензор инерции твердого тела
В этом разделе мы рассматриваем величины, характеризующие распределение массы системы в пространстве.
Сложившаяся система обозначений
Тензор инерции твердого тела
Для вычисления момента импульса и кинетической энергии твердого тела, нам нужно знать всего несколько характеристик тела, величины которых зависят от распределения масс точек, составляющих тело. Эти величины составляют компоненты, так называемого, тензора инерции , который определяется относительно некоторого, предварительно выбранного, центра O , и вычисляется по формуле:
(И1) .
Здесь – координаты точки массы в декартовой системе координат, с началом в выбранном центре O ; при p = q , при p ≠ q . Индексы координат нумеруют цифрами, придерживаясь следующих обозначений:
.
Тензор инерции имеет следующие шесть компонент:
;
;
.
Если в качестве полюса O выбрать центр масс C тела, то компоненты момента импульса и кинетическая энергия тела T вычисляются по относительно простым формулам:
.
Здесь – скорость центра масс тела, – компоненты угловой скорости.
Моменты инерции твердого тела
Пользоваться тензором инерции (И1) ⇑ удобно, поскольку, при решении задач, мы сразу можем применить результаты теории тензорного исчисления. Однако сложилось так, что вместо тензора инерции вводят его отдельные компоненты, придав им специфические названия и обозначения.
Осевые моменты инерции:
;
Центробежные моменты инерции:
.
Все это может привести к путанице. Поэтому компоненты тензора инерции мы будем обозначать буквой I . А сложившиеся названия и обозначения его отдельных компонент – буквой J .
Определения моментов инерции
Свойства моментов инерции
Сумма осевых моментов инерции
Знаки моментов инерции
Осевые моменты инерции не могут быть отрицательными:
.
Центробежные моменты инерции могут быть положительными, отрицательными, или равными нулю.
Симметричность моментов инерции
Центробежные моменты инерции симметричны относительно своих индексов:
.
Все моменты инерции имеют размерность [кг·м 2 ].
Для вычисления моментов инерции сплошных тел, мы от суммирования переходим к интегрированию. При этом массу точки mk мы заменяем на дифференциал: . Дифференциал массы dm выражаем через плотность μ и элемент объема : . Далее интегрируем по объему тела V :
.
Моменты инерции в разных системах координат
Если мы от начальной системы координат Oxyz перейдем к другой системе O′x′y′z′ , то величины моментов инерции в новой системе будут отличаться от моментов в старой системе координат. Такие переходы называются преобразованиями системы координат.
Повороты системы координат
Сначала рассмотрим случай, когда две декартовы системы координат Oxyz и Ox′y′z′ имеют общее начало O . То есть вторая система получена из первой поворотом вокруг общего центра O . Согласно тензорной алгебре, любой симметричный тензор, поворотом системы координат можно привести к диагональному виду. То есть можно найти такую декартову систему координат, относительно которой все центробежные моменты равны нулю. Оси такой системы координат называются главными осями инерции тела.
Главная ось инерции тела , относительно некоторой точки O – это ось, для которой оба центробежных момента инерции, содержащие индекс этой оси, равны нулю. Например, если ось z – главная ось инерции, то .
Главный момент инерции тела , относительно некоторой точки O – это момент инерции относительно главной оси инерции.
Главная центральная ось инерции тела – это главная ось, проходящая через центр масс тела.
Главный центральный момент инерции тела – это момент инерции относительно главной центральной оси инерции.
Любое тело в пространстве имеет три главные оси инерции и три значения главных моментов инерции (относительно предварительно выбранной точки O ). При этом главные моменты инерции могут иметь равные значения.
Стоит подчеркнуть, что главные оси определяются относительно определенной точки тела. При выборе другой точки, главные оси могут иметь другие направления.
Тело с плоскостью симметрии
Если распределение массы тела в пространстве имеет плоскость симметрии, то любая ось, перпендикулярная к этой плоскости, будет главной осью инерции тела, а две другие главные оси лежат в плоскости симметрии.
Тело с осью симметрии
Если распределение массы тела в пространстве имеет ось симметрии, то эта ось является главной центральной осью инерции.
Параллельность главных осей
Если точка O расположена на главной центральной оси тела, то главные оси, проходящие через эту точку, параллельны главным центральным осям.
Главная ось, не проходящая через центр масс
Главная ось инерции, не проходящая через центр масс тела, является главной осью инерции только в одной точке.
Инвариантность суммы осевых моментов инерции
Если от одной системы координат Oxyz , мы перейдем к другой Ox′y′z′ с тем же началом, то сумма осевых моментов инерции не изменится при переходе от одной системы к другой:
.
По этой причине, величина полярного момента инерции не зависит от поворотов системы координат. То есть является инвариантом относительно поворотов системы координат. Она зависит от выбранного центра, относительно которого определяются моменты инерции.
Момент инерции относительно произвольной оси
Пусть нам известны моменты инерции тела относительно осей Oxyz . И пусть OL – произвольная ось, проходящая через начало O , составляющая углы с осями Ox, Oy, Oz . Тогда момент инерции тела относительно оси OL определяется по формуле:
.
Если оси x,y,z являются главными осями, то
.
Перенос системы координат. Теорема Гюйгенса-Штейнера
Отсюда следует, что осевой момент инерции будет иметь наименьшее значение относительно той оси, которая проходит через центр масс тела.
Моменты инерции некоторых тел
Однородный стержень
Рассмотрим тонкий однородный стержень длины l и массы m . Выберем начало координат O на одном из его концов. Направим ось Ox вдоль стержня; оси Oy и Oz – перпендикулярно. Эти оси будут главными осями инерции стержня относительно центра O . Осевые моменты инерции имеют следующие значения:
.
Центр масс стержня находится по его середине, в точке C ; . Проведем через нее оси координат Cxy′z′ , параллельные предыдущим. Эти оси являются главными центральными осями инерции со следующими значениями осевых моментов:
.
Прямоугольный параллелепипед
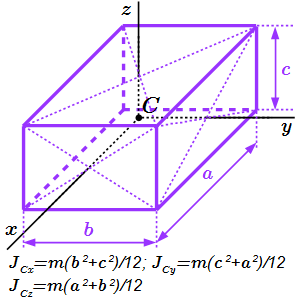
Рассмотрим прямоугольный параллелепипед с длинами ребер a, b, c (см. рисунок). Его центр масс C находится в центре параллелепипеда. Оси, проведенные через центр масс параллельно сторонам, будут главными центральными осями инерции. Моменты инерции прямоугольного параллелепипеда:
.
Полый цилиндр
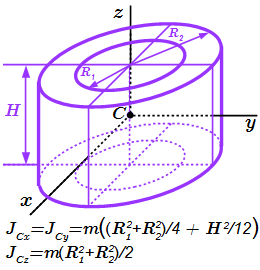
Рассмотрим полый цилиндр высоты H и радиусами . Его центр масс находится на оси цилиндра, на расстоянии от основания. Через точку C проводим главные центральные оси инерции: ось Cz – вдоль оси цилиндра; оси Cx, Cy – перпендикулярно. Моменты инерции полого цилиндра:
.
Однородный сплошной диск
Тонкий обруч
Динамика твердого тела
Свободное движение твердого тела
Рассмотрим твердое тело массы m , перемещение которого не ограничено в пространстве. Пусть на тело действуют внешние силы , приложенных в точках . Для определения уравнений движения, мы воспользуемся теоремой о движении центра масс ⇑, теоремой моментов относительно центра масс системы ⇑, и выражением кинетического момента тела через компоненты угловой скорости ωq и тензора инерции Ipq тела (в системе координат с началом в центре масс, оси которой параллельны осям неподвижной системы):
(Т1) ;
(Т2) ;
(Т3) .
Здесь – радиус-вектор, проведенный в центр масс тела.
При известных внешних силах , из уравнения (Т1) можно определить закон движения центра масс тела.
Уравнения (Т2)–(Т3) определяют закон движения тела при его вращении. Они записаны в системе отсчета, начало которой находится в центре масс C , а оси параллельны осям инерциальной системы отсчета. Чтобы ими воспользоваться, мы должны найти способ, с помощью которого можно задать положение тела при его вращении. Это можно сделать с помощью углов Эйлера. Тогда оси вращающейся системы координат, связанной с телом, удобно направить вдоль главных центральных осей инерции тела ⇑. Тогда правые части уравнений (Т3) будут выражаться через главные центральные моменты инерций тела ⇑, три угла Эйлера и их производные по времени. Дифференцируя (Т3) и подставляя в (Т2), получим систему дифференциальных уравнений второго порядка для трех углов Эйлера.
Поступательное движение твердого тела
Рассмотрим поступательное движение твердого тела. Для него угловая скорость и угловое ускорение равны нулю: . Тогда момент количества движения постоянен и равен нулю: . Из (Т2) следует, что и главный момент всех внешних сил относительно центра масс должен равняться нулю: .
Дифференциальные уравнения поступательного движения определяются по формулам (Т1) ⇑:
.
Здесь – проекции внешней силы на оси координат. При поступательном движении, все точки тела имеют равные скорости и равные ускорения. Потому определив закон движения одной точки – центра масс , мы получаем закон движения произвольной точки A :
.
Плоское движение твердого тела
Рассмотрим плоское движение твердого тела. Выберем инерциальную систему координат Oxyz . Оси Ox и Oy направим в плоскости движения. Тогда положение тела полностью определяется тремя величинами – двумя компонентами радиус-вектора центра масс C : ; и углом поворота φ . Внешние силы также лежат в рассматриваемой плоскости. Кинетический момент направлен вдоль оси z и выражается через угловую скорость и момент инерции относительно оси, проходящей через центр масс C , перпендикулярно плоскости движения: .
Уравнения (Т1)-(Т3) ⇑ принимают вид:
(Т4) ;
(Т5) .
Здесь – проекции внешней силы на оси координат; – это алгебраический момент силы относительно центра C – то есть проекция момента силы на ось Oz .
Вращение твердого тела вокруг неподвижной оси
Рассмотрим вращение твердого тела вокруг неподвижной оси Oz . Выберем декартову систему координат. Ось Oz направим вдоль оси вращения; оси Ox и Oy – перпендикулярно. Считаем, что перемещение параллельно оси вращения отсутствует. Тогда это плоское движение. Оно происходит в плоскости Oxy . Положение тела определяется только углом поворота φ вокруг оси вращения.
Применяя теорему моментов ⇑ и связь момента с угловой скоростью ⇑, получим дифференциальное уравнение вращения твердого тела вокруг неподвижной оси:
(Т6) .
Здесь – момент инерции тела относительно оси вращения; – вращающий момент – то есть сумма моментов всех внешних сил относительно оси вращения.
Вводя угловое ускорение , дифференциальное уравнение вращения примет вид:
.
Оно аналогично уравнению прямолинейного движения под действием силы Fx :
.
Если вращающий момент является постоянной величиной: , то уравнение (Т6) имеет решение:
.
Здесь – угол поворота и угловая скорость вращения в начальный момент времени ; – угловое ускорение, постоянная величина.
Физический и математический маятники
Далее мы будем приводить данные только для плоского движения маятника. То есть мы считаем, что маятник совершает колебания вокруг неподвижной оси.
Уравнение вращательного движения физического маятника имеет вид:
.
Здесь ось вращения проходит через точку O ; φ – угол поворота между осью маятника и вертикальной прямой; JO – момент инерции маятника относительно оси вращения; P =mg – сила тяжести, действующая на маятник массы m ; a – расстояние от оси вращения O до центра масс C маятника; g – ускорение свободного падения. Введем обозначение: . Тогда
.
Рассмотрим малые колебания . При этом . И мы получаем уравнение гармонических колебаний:
.
Общее решение этого уравнения имеет вид:
.
Здесь – постоянные, которые определяются из начальных условий.
Во многих случаях удобно выразить общее решение уравнения малых колебаний через амплитуду α и начальную фазу колебаний β :
.
Величина k называется угловой частотой колебаний. Период колебаний: . Для малых колебаний, период не зависит от амплитуды. Этот результат является приближенным. При увеличении амплитуды такая зависимость появляется.
Математический маятник – это материальная точка, подвешенная на нерастяжимой невесомой нити, и совершающая колебания под действием силы тяжести. 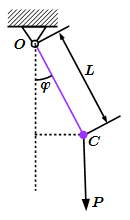 Математический маятник.
Математический маятник.
Математический маятник является частным случаем физического маятника. Пусть L – длина нити математического маятника. Его центр масс C находится в материальной точке: L = |OC| . Момент инерции: . Выразив силу тяжести P через массу m и ускорение свободного падения g , получим угловую частоту колебаний:
.
Теперь вернемся к физическому маятнику. Если положить , то частота физического маятника будет совпадать с частотой математического маятника длины L :
.
Приведенная длина физического маятника – это длина математического маятника, частота колебаний которого совпадает с частотой колебаний рассматриваемого физического маятника.
Центром качаний физического маятника называется точка K на оси физического маятника, находящаяся на расстоянии его приведенной длины от точки подвеса.
Свойство взаимности
Если физический маятник подвесить за центр качаний K , то его частота колебаний не изменится, а прежняя точка подвеса O станет центром качаний нового маятника.
Положение центра качания
Центр качаний всегда расположен ниже центра масс:
.
Принцип Даламбера
Суть принципа Даламбера состоит в том, чтобы задачи динамики свести к задачам статики. Для этого предполагают (или это заранее известно), что тела системы имеют определенные (угловые) ускорения. Далее вводят силы инерции и (или) моменты сил инерции, которые равны по величине и обратные по направлению силам и моментам сил, которые по законам механики создавали бы заданные ускорения или угловые ускорения
Принцип Даламбера
Если в любой момент времени к каждой точке системы приложить силы инерции и реально действующие силы, то полученная система сил будет находиться в равновесии, и к ней можно применять уравнения статики.
Рассмотрим пример. Путь тело массы m совершает поступательное движение и на него действуют внешние силы . Далее мы предполагаем, что эти силы создают ускорение центра масс системы . По теореме о движении центра масс, центр масс тела имел бы такое же ускорение, если бы на тело действовала сила . Далее мы вводим силу инерции:
.
После этого задача динамики:
.
Превращается в задачу статики:
;
.
Для вращательного движения поступают аналогичным образом. Пусть тело вращается вокруг оси z и на него действуют внешние моменты сил . Мы предполагаем, что эти моменты создают угловое ускорение εz . Далее мы вводим момент сил инерции M И = – Jz εz . После этого задача динамики:
.
Превращается в задачу статики:
;
.
Принцип возможных перемещений
Принцип возможных перемещений применяется для решений задач статики. В некоторых задачах, он дает более короткое решение, чем составление уравнений равновесия. Особенно это касается систем со связями (например, системы тел, соединенные нитями и блоками), состоящих из множества тел
Принцип возможных перемещений.
Для равновесия механической системы с идеальными связями необходимо и достаточно, чтобы сумма элементарных работ всех действующих на нее активных сил при любом возможном перемещении системы была равна нулю.
Возможное перемещение системы – это малое перемещение, при котором не нарушаются связи, наложенные на систему.
Общее уравнение динамики (принцип Даламбера — Лагранжа)
Принцип Даламбера — Лагранжа – это объединение принципа Даламбера с принципом возможных перемещений. То есть, при решении задачи динамики, мы вводим силы инерции и сводим задачу к задаче статики, которую решаем с помощью принципа возможных перемещений.
Принцип Даламбера — Лагранжа.
При движении механической системы с идеальными связями в каждый момент времени сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещении системы равна нулю:
.
Это уравнение называют общим уравнением динамики.
Уравнения Лагранжа
Число обобщенных координат n совпадает с числом степеней свободы системы.
Если, при возможном перемещении системы, изменяются все координаты, то работа, совершаемая внешними силами при таком перемещении, имеет вид:
δA = Q 1 δq 1 + Q 2 δq 2 + . + Qn δqn .
Тогда обобщенные силы являются частными производными от работы по перемещениям:
.
Для потенциальных сил с потенциалом Π ,
.
Уравнения Лагранжа – это уравнения движения механической системы в обобщенных координатах:
Здесь T – кинетическая энергия. Она является функцией от обобщенных координат, скоростей и, возможно, времени. Поэтому ее частная производная также является функцией от обобщенных координат, скоростей и времени. Далее нужно учесть, что координаты и скорости являются функциями от времени. Поэтому для нахождения полной производной по времени нужно применить правило дифференцирования сложной функции:
.
Использованная литература:
А. П. Маркеев, Теоретическая механика, «Ижевская республиканская типография», 1999.
Н. Н. Никитин, Курс теоретической механики, «Высшая школа», 1990.
С. М. Тарг, Краткий курс теоретической механики, «Высшая школа», 2010.
А. А. Яблонский, Курс теоретической механики, часть 2, динамика «Высшая школа», 1986.
Автор: Олег Одинцов . Опубликовано: 20-07-2015 Изменено: 23-08-2019
http://www.evkova.org/sistema-sil-na-ploskosti-v-teoreticheskoj-mehanike
http://1cov-edu.ru/mehanika/dinamika-tel/