Скорость ускорение нормальное тангенциальное полное уравнения движения
Понятия о скорости, тангенциальном и нормальном ускорениях. Формулы
Чтобы уметь решать различные задачи на движение тел по физике, необходимо знать определения физических величин, а также формулы, с помощью которых они связаны. В этой статье будут рассмотрены вопросы, что такое тангенциальная скорость, что такое полное ускорение и какие компоненты его составляют.
Понятие о скорости
Двумя основными величинами кинематики перемещения тел в пространстве являются скорость и ускорение. Скорость описывает быстроту перемещения, поэтому математическая форма записи для нее имеет следующий вид:
Вам будет интересно: Что такое туча? Определение
Здесь l¯ — является вектором перемещения. Иными словами, скорость — это производная по времени от пройденного пути.
Как известно, всякое тело движется по воображаемой линии, которая называется траекторией. Вектор скорости всегда направлен по касательной к этой траектории, в какой бы точке не находилось движущееся тело.
Существует несколько названий величины v¯, если рассматривать ее совместно с траекторией. Так, поскольку направлена она по касательной, то ее называют тангенциальной скоростью. Также о ней могут говорить, как о линейной физической величине в противоположность угловой скорости.
Вычисляется скорость в метрах в секунду в СИ, однако на практике часто пользуются километрами в час.
Понятие об ускорении
В отличие от скорости, которая характеризует быстроту прохождения телом траектории, ускорение — это величина, описывающая быстроту изменения скорости, что математически записывается так:
Как и скорость, ускорение — это векторная характеристика. Однако его направление не связано с вектором скорости. Оно определяется изменением направления v¯. Если в процессе движения скорость не изменяет своего вектора, тогда ускорение a¯ будет направлено вдоль той же линии, что и скорость. Такое ускорение называют тангенциальным. Если же скорость будет менять направление, сохраняя при этом абсолютное значение, то ускорение будет направлено к центру кривизны траектории. Оно называется нормальным.
Измеряется ускорение в м/с2. Например, известное всем ускорение свободного падения является тангенциальным при вертикальном подъеме или падении объекта. Его величина вблизи поверхности нашей планеты составляет 9,81 м/с2, то есть за каждую секунду падения скорость тела увеличивается на 9,81 м/с.
Причиной появления ускорения является не скорость, а сила. Если сила F оказывает действие на тело массой m, то она неминуемо создаст ускорение a, которое можно вычислить так:
Эта формула является прямым следствием из второго закона Ньютона.
Полное, нормальное и тангенциальное ускорения
Скорость и ускорение как физические величины были рассмотрены в предыдущих пунктах. Теперь мы подробнее изучим, какие компоненты составляют полное ускорение a¯.
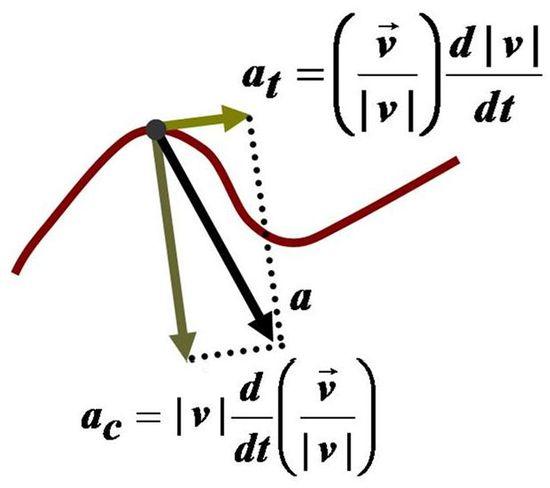
Предположим, что тело движется со скоростью v¯ по криволинейной траектории. Тогда будет справедливо равенство:
Вектор u¯ имеет единичную длину и направлен вдоль касательной линии к траектории. Воспользовавшись таким представлением скорости v¯, получим равенство для полного ускорения:
a¯ = dv¯/dt = d(v*u¯)/dt = dv/dt*u¯ + v*du¯/dt.
Полученное в правом равенстве первое слагаемое называется тангенциальным ускорением. Скорость связана с ним тем фактом, что она количественно определяет изменение абсолютного значения величины v¯, не принимая во внимание ее направление.
Второе слагаемое — это нормальное ускорение. Оно количественно описывает изменение вектора скорости, не принимая во внимание изменение ее модуля.
Если обозначить как at и an тангенциальную и нормальную составляющие полного ускорения a, тогда модуль последнего можно вычислить по формуле:
Связь тангенциального ускорения и скорости
Соответствующую связь описывают кинематические выражения. Например, в случае движения по прямой с постоянным ускорением, которое является тангенциальным (нормальная составляющая равна нулю), справедливы выражения:
В случае движения по окружности с постоянным ускорением эти формулы так же справедливы.
Таким образом, какой бы ни была траектория перемещения тела, тангенциальное ускорение через тангенциальную скорость рассчитывается, как производная по времени от ее модуля, то есть:
Например, если скорость изменяется по закону v = 3*t3 + 4*t, тогда at будет равно:
at = dv/dt = 9*t2 + 4.
Скорость и нормальное ускорение
Запишем в явном виде формулу для нормальной компоненты an, имеем:
an¯ = v*du¯/dt = v*du¯/dl*dl/dt = v2/r*re¯
Где re¯ — единичной длины вектор, который к центру кривизны траектории направлен. Это выражение устанавливает связь тангенциальной скорости и нормального ускорения. Видим, что последнее зависит от модуля v в данный момент времени и от радиуса кривизны r.
Нормальное ускорение появляется всегда, когда изменяется вектор скорости, однако оно равно нулю, если этот вектор сохраняет направление. Говорить о величине an¯ имеет смысл только тогда, когда кривизна траектории является конечной величиной.
Выше мы отмечали, что при движении по прямой линии нормальное ускорение отсутствует. Однако в природе существует тип траектории, при движении по которой an имеет конечную величину, а at = 0 при |v¯| = const. Этой траекторией является окружность. Например, вращение с постоянной частотой металлического вала, карусели или планеты вокруг собственной оси происходит с постоянным нормальным ускорением an и нулевым тангенциальным ускорением at.
Кинематика материальной точки. Система отсчета. Перемещение, траектория, путь. Скорость. Ускорение. Нормальная и тангенциальная составляющие ускорения.
Читайте также:
Cудебник 1550 г. Общая характеристика, система и источники
I. Семинар. Тема 1. Предмет, система, задачи судебной медицины. Правовые и организационные основы судебно-медицинской экспертизы, Понятие, объекты, виды, экспертизы
I. СИСТЕМА ПСИХОЛОГИЧЕСКОГО ОБЕСПЕЧЕНИЯ ОБРАЗОВАНИЯ В СОВРЕМЕННЫХ УСЛОВИЯХ
II. Налоговая система.
II. Скорость света в вакууме одинакова для всех инерциальных систем отсчета. Она не зависит ни от скорости источника, ни от скорости приемника светового сигнала.
IV. Внешняя система
IV. ИЗБИРАТЕЛЬНАЯ СИСТЕМА.
V. Формы и методы контроля, система оценок
v011 Кинематика поступательного движения м. т. в пространстве.
V2: 1.1. Денежная система: понятие, структура и типы
Кинема́тика точки — раздел кинематики, изучающий математическое описание движения материальных точек. Основной задачей кинематики является описание движения при помощи математического аппарата без выяснения причин, вызывающих это движение.
Движение любого объекта в кинематике изучают по отношению к некоторой системе отсчета, включающей:
· Систему измерения положения тела в пространстве (систему координат);
· Прибор для измерения времени (Часы).
Материальная точка — тело, размерами которого по сравнению с характерными расстояниями данной задачи можно пренебречь. Так Землю можно считать Материальной Точкой (М. Т.) при изучении её движения вокруг Солнца, пулю можно считать М. Т. при её движении в поле тяжести Земли, но нельзя считать таковой при учете её вращательного движения в стволе винтовки.
Траекторией материальной точки называется линия, которую она описывает при движении относительно начала отсчета.
Перемещение– это вектор, проведенный из начального положения материальной точки в конечное. Путь– это длина участка траектории, пройденного материальной точкой за данный промежуток времени. В отличие от перемещения путь – это скалярная величина.
Скоростью (мгновенной скоростью) движения называется векторная величина, равная отношению малого перемещения к бесконечно малому промежутку времени, за которое это перемещение производится:
Векторная физическая величина, равная первой производной от S. Мгновенная скорость всегда направлена по касательной к траектории.
Средняя скорость, равная отношению пройденного пути ко времени, которое движется тело:
Средняя (путевая) скорость — это отношение длины пути, пройденного телом, ко времени, за которое этот путь был пройден:
Средняя путевая скорость, в отличие от мгновенной скорости не является векторной величиной.
Средняя скорость равна среднему арифметическому от скоростей тела во время движения только в том случае, когда тело двигалось с этими скоростями одинаковые промежутки времени.
Можно также ввести среднюю скорость по перемещению, которая будет вектором, равным отношению перемещения ко времени, за которое оно совершено:
Мгновенным ускорением называется векторная величина, равная отношению малого изменения скорости к малому промежутку времени, за который происходило это изменение:
Векторная физическая величина, равная второй производной от S и, соответственно, первой производной от мгновенной скорости по времени. Характеризует быстроту изменения скорости.
Среднее ускорение – это отношение изменения скорости к промежутку времени, за который это изменении произошло. Определить среднее ускорение можно формулой:
;
Тангенциальное (касательное) ускорение – это составляющая вектора ускорения, направленная вдоль касательной к траектории в данной точке траектории движения. Тангенциальное ускорение характеризует изменение скорости по модулю при криволинейном движении.
Направление вектора тангенциального ускорения τ) совпадает с направлением линейной скорости или противоположно ему. То есть вектор тангенциального ускорения лежит на одной оси с касательной окружности, которая является траекторией движения тела.
Нормальное ускорение– это составляющая вектора ускорения, направленная вдоль нормали к траектории движения в данной точке на траектории движения тела. То есть вектор нормального ускорения перпендикулярен линейной скорости движения. Нормальное ускорение характеризует изменение скорости по направлению и обозначается буквой n. Вектор нормального ускорения направлен по радиусу кривизны траектории.
Полное ускорение при криволинейном движении складывается из тангенциального и нормального ускорений по правилу сложения векторов и определяется формулой:
2. Описание движения материальной точки (частные случаи: равномерное движение по окружности, прямолинейное равномерное движение, равнопеременное движение по окружности).
Равномерное движение по окружности – это простейший пример криволинейного движения. Например, по окружности движется конец стрелки часов по циферблату. Скорость движения тела по окружности носит название линейная скорость.
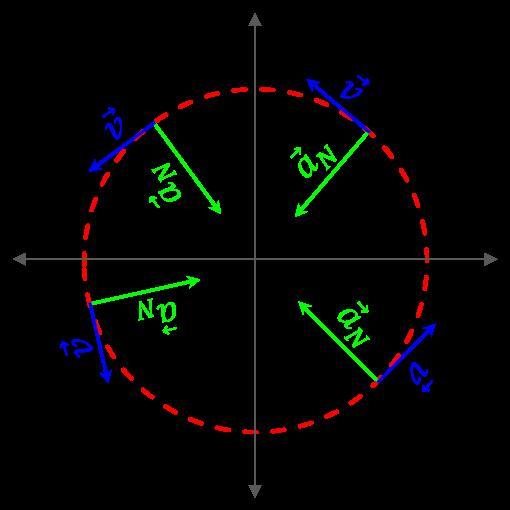
При равномерном движении тела по окружности модуль скорости тела с течением времени не изменяется, то есть v = const, а изменяется только направление вектора скорости .Тангенциальное ускорение в этом случае отсутствует (ar = 0), а изменение вектора скорости по направлению характеризуется величиной, которая называется центростремительное ускорение(нормальное ускорение) an или аЦС. В каждой точке траектории вектор центростремительного ускорения направлен к центру окружности по радиусу.
Модуль центростремительного ускорения равен aЦС=v 2 / R Где v – линейная скорость, R – радиус окружности
Когда описывается движение тела по окружности, используется угол поворота радиуса – угол φ, на который за время t поворачивается радиус, проведённый из центра окружности до точки, в которой в этот момент находится движущееся тело. Угол поворота измеряется в радианах. Радианравен углу между двумя радиусами окружности, длина дуги между которыми равна радиусу окружности (рис. 1.23). То есть если l = R, то 1 радиан= l / R l = 2πR Угловая скорость равномерного движения тела по окружности – это величина ω, равная отношению угла поворота радиуса φ к промежутку времени, в течение которого совершён этот поворот: ω = φ / t Единица измерения угловой скорости – радиан в секунду [рад/с]. Модуль линейной скорости определяется отношением длины пройденного пути l к промежутку времени t: v= l / t Линейная скорость при равномерном движении по окружности направлена по касательной в данной точке окружности. При движении точки длина l дуги окружности, пройденной точкой, связана с углом поворота φ выражением l = Rφ где R – радиус окружности.
Тогда в случае равномерного движения точки линейная и угловая скорости связаны соотношением: v = l / t = Rφ / t = Rω или v = Rω
Период обращения – это промежуток времени Т, в течение которого тело (точка) совершает один оборот по окружности. Частота обращения – это величина, обратная периоду обращения – число оборотов в единицу времени (в секунду). Частота обращения обозначается буквой n. n = 1 / T За один период угол поворота φ точки равен 2π рад, поэтому 2π = ωT, откуда
T = 2π / ω То есть угловая скорость равна ω = 2π / T = 2πn Центростремительное ускорение можно выразить через период Т и частоту обращения n: aЦС = (4π 2 R) / T 2 = 4π 2 Rn 2
Прямолинейное равномерное движение
Равномерное движение – это движение с постоянной скоростью, то есть когда скорость не изменяется (v = const) и ускорения или замедления не происходит (а = 0).
Прямолинейное движение – это движение по прямой линии, то есть траектория прямолинейного движения – это прямая линия.
Равномерное прямолинейное движение – это движение, при котором тело за любые равные промежутки времени совершает одинаковые перемещения. Например, если мы разобьём какой-то временной интервал на отрезки по одной секунде, то при равномерном движении тело будет перемещаться на одинаковое расстояние за каждый из этих отрезков времени.
Скорость равномерного прямолинейного движения не зависит от времени и в каждой точке траектории направлена также, как и перемещение тела. То есть вектор перемещения совпадает по направлению с вектором скорости. При этом средняя скорость за любой промежуток времени равна мгновенной скорости:
Скорость равномерного прямолинейного движения – это физическая векторная величина, равная отношению перемещения тела за любой промежуток времени к значению этого промежутка t: = / t
Таким образом, скорость равномерного прямолинейного движения показывает, какое перемещение совершает материальная точка за единицу времени.
Перемещение при равномерном прямолинейном движении определяется формулой: = • t
Пройденный путь при прямолинейном движении равен модулю перемещения. Если положительное направление оси ОХ совпадает с направлением движения, то проекция скорости на ось ОХ равна величине скорости и положительна:
vx = v, то есть v > 0
Проекция перемещения на ось ОХ равна:
где x0 – начальная координата тела, х – конечная координата тела (или координата тела в любой момент времени)
Уравнение движения, то есть зависимость координаты тела от времени х = х(t), принимает вид:
Если положительное направление оси ОХ противоположно направлению движения тела, то проекция скорости тела на ось ОХ отрицательна, скорость меньше нуля (v
Дата добавления: 2015-01-30 ; просмотров: 30 | Нарушение авторских прав
Лекция №2. Элементы кинематики
1.4. Нормальное и тангенциальное ускорения при криволинейном движении
В общем случае при движении тела его скорость изменяется как по величине, так и по направлению. Для характеристики быстроты изменения скорости движения вводится понятие ускорения.
Рассмотрим плоское движение, т. е. такое, при котором все участки траектории точки лежат в одной плоскости. Пусть вектор υ задает скорость точки А , в момент времени t . За время Δt движущаяся точка перешла в положение В и приобрела скорость, отличную от υ как по модулю, так и направлению и равную υ1 = υ +Δ υ . Перенесем вектор υ1 в точку А и найдем Δ υ (рис.). Средним ускорением aср неравномерного движения в интервале времени от t до t+Δt называется векторная величина, равная отношению изменения скорости Δ υ к интервалу времени Δt :
Ускорение в данный момент времени (мгновенное ускорение) представляет собой предел, к которому стремится выражение (1.4.1) при Δt 0 , т. е.
Таким образом, ускорение есть векторная величина, равная первой производной скорости по времени.
Разложим вектор Δ υ на две составляющие. Для этого из точки А (рис. 1.4.1) по направлению скорости υ отложим вектор AD , по модулю равный υ1 . Очевидно, что вектор CD , равный Δ υτ , определяет изменение скорости по модулю за время Δt : Δυτ=υ1−υ . Вторая же составляющая Δυn вектора Δ υ характеризует изменение скорости за время Δt no направлению.
Тангенциальная составляющая ускорения
т.е. равна первой производной по времени от модуля скорости, определяя тем самым быстроту изменения скорости по модулю.
Определим вторую составляющую ускорения. Допустим, что точка B близка к точке A , поэтому Δs можно считать дугой окружности некоторого радиуса r , мало отличающейся от хорды AB . Тогда из подобия треугольников AOB и EAD следует Δυn/AB=υ1/r , но так как AB=υΔt , то Δυn/t=υυ1/r . В пределе Δt 0 , получим υ1 υ .
Поскольку υ1 υ , угол EAD стремится к нулю, а так как треугольник EAD равнобедренный, то угол АDE между υ и Δ υn стремится к прямому. Следовательно, при Δt 0 векторы υ и Δ υn оказываются взаимно перпендикулярными. Так как вектор скорости направлен по касательной к траектории, то вектор Δ υn , перпендикулярный вектору скорости, направлен к центру ее кривизны. Вторая составляющая ускорения, равная
называется нормальной составляющей ускорения и направлена по нормали к траектории к центру ее кривизны. Поэтому эту составляющую ускорения называют также центростремительным ускорением.
Таким образом, полное ускорение тела a есть геометрическая сумма тангенциальной aτ и нормальной an составляющих
Тангенциальное ускорение равно первой производной по времени от модуля скорости и определяет быстроту изменения скорости по модулю, и направлено по касательной к траектории.
Нормальное ускорение определяет быстроту изменения скорости по направлению и направлено к центру кривизны траектории.
Векторы aτ и an взаимно перпендикулярны поэтому модуль полного ускорения равен
1.5. Классификация движений материальной точки
В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать следующим образом:
Так как $$\vec <υ>= \over dt>$$ , то, проинтегрировав полученное выражение в пределах от нуля до произвольного момента времени можно найти перемещение точки: или
3) aτ= ƒ(t), an=0 − прямолинейное движение с переменным ускорением.
4) aτ=0, an=const — При таком движении скорость точки не изменяется по модулю, так как тангенциальная составляющая равна нулю, а изменяется только по направлению.
5) aτ=const, an≠const − равнопеременное движение по окружности.
Вращательное движение − это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения. При вращательном движении скорости и ускорения различных точек тела неодинаковы. Поэтому в качестве общих кинематических характеристик движения тела при вращении вводятся угол поворота, угловая скорость и угловое ускорение тела. При вращении тела угол поворота изменяется со временем по некоторому закону ϕ = ϕ(t) , который называется уравнением вращательного движения тела.
Угловой скоростью тела называется вектор, численно равный первой производной по времени от угла поворота тела по времени и направленный вдоль оси вращения по правилу правого винта:
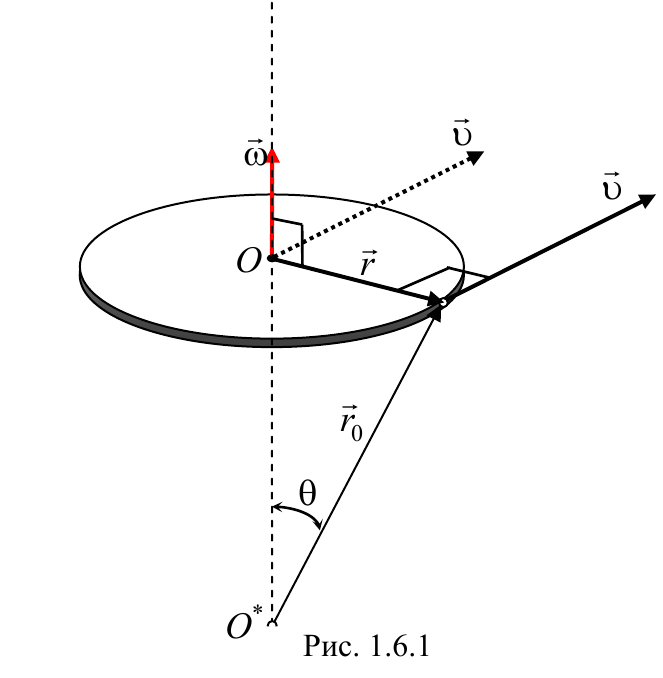
Вектор угловой скорости направлен по оси вращения, причем так, чтобы вращение, рассматриваемое с конца вектора угловой скорости, происходило против хода часовой стрелки (рис 1.6.1). Единицей угловой скорости является рад/с.
Скорость произвольной точки вращающегося тела называется линейной скоростью этой точки.
При равномерном вращении угловая скорость не изменяется со временем, то есть является постоянной величиной (ω = const) . Тогда
Равномерное вращение характеризуется периодом вращения и частотой вращения.
Период вращения − это время, за которое точка совершает один полный оборот, т. е. поворачивается на угол ϕ = 2π и на основании выражения (1.6.1) $$= <2<π>\over ω>$$
Частота вращения − это число полных оборотов, которое делает точка при равномерном вращении, за единицу времени: $$ = <1\over T>= <ω\over 2π>$$ , откуда ϕ = 2πn .
Для характеристики неравномерного вращения тела вводится понятие углового ускорения .
Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени:
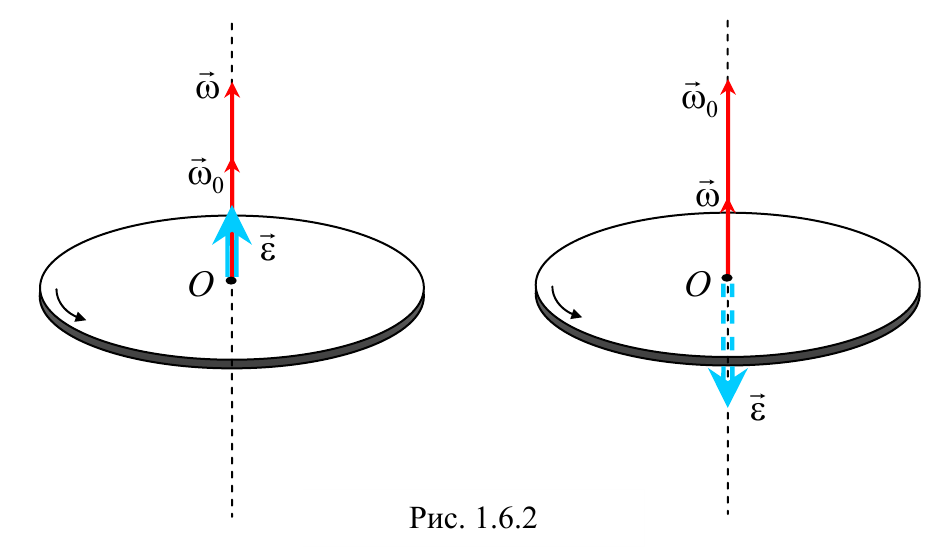
При ускоренном вращении вектор углового ускорения сонаправлен с вектором угловой скорости, а при замедленном − противоположен ему.
В случае равнопеременного движения точки по окружности (ε = const) угловая скорость определяется по формуле
Или в скалярном виде
Проинтегрировав выражение (1.6.1) можно получить формулу для угла поворота тела
Исключив из последнего уравнения t , получим
где φ = 2πN , N − число полное число оборотов, совершенных телом.
В случае ε = ε(t) , угловая скорость и закон вращательного движения определяются следующими формулами
1.7. Связь между линейными и угловыми характеристиками тела при его вращении
За время dt точка проходит по дуге окружности радиуса R путь dS = Rdφ . Поэтому $$ <υ>= = = <ωR>$$ .
Если угол поворота вращающегося тела представить в виде dφ = ω(t)dt и проинтегрировать в пределах от начального момента времени t1 до конечного момента времени t2 , то получится угол, на который совершила поворот тело за время:
Тангенциальная и нормальная составляющие ускорения произвольной точки тела, вращающегося вокруг неподвижной оси, определяются формулами:
Полученные соотношения (1.7.1) можно записать в векторном виде. Для этого на оси вращения ОО* (рис. 1.6.1) тела выберем любую точку A и проведем из нее радиус-вектор r в точку M . Векторное произведение ω × r по модулю и направлению совпадает с вектором скорости υ точки M :
Следовательно, можно записать, что вектор скорости υ = ω × r , а вектор ускорения точки
 Вам будет интересно: Что такое туча? Определение
Вам будет интересно: Что такое туча? Определение




 ;
; 

 .Тангенциальное ускорение в этом случае отсутствует (ar = 0), а изменение вектора скорости по направлению характеризуется величиной, которая называется центростремительное ускорение(нормальное ускорение) an или аЦС. В каждой точке траектории вектор центростремительного ускорения направлен к центру окружности по радиусу.
.Тангенциальное ускорение в этом случае отсутствует (ar = 0), а изменение вектора скорости по направлению характеризуется величиной, которая называется центростремительное ускорение(нормальное ускорение) an или аЦС. В каждой точке траектории вектор центростремительного ускорения направлен к центру окружности по радиусу. за любой промежуток времени к значению этого промежутка t:
за любой промежуток времени к значению этого промежутка t: 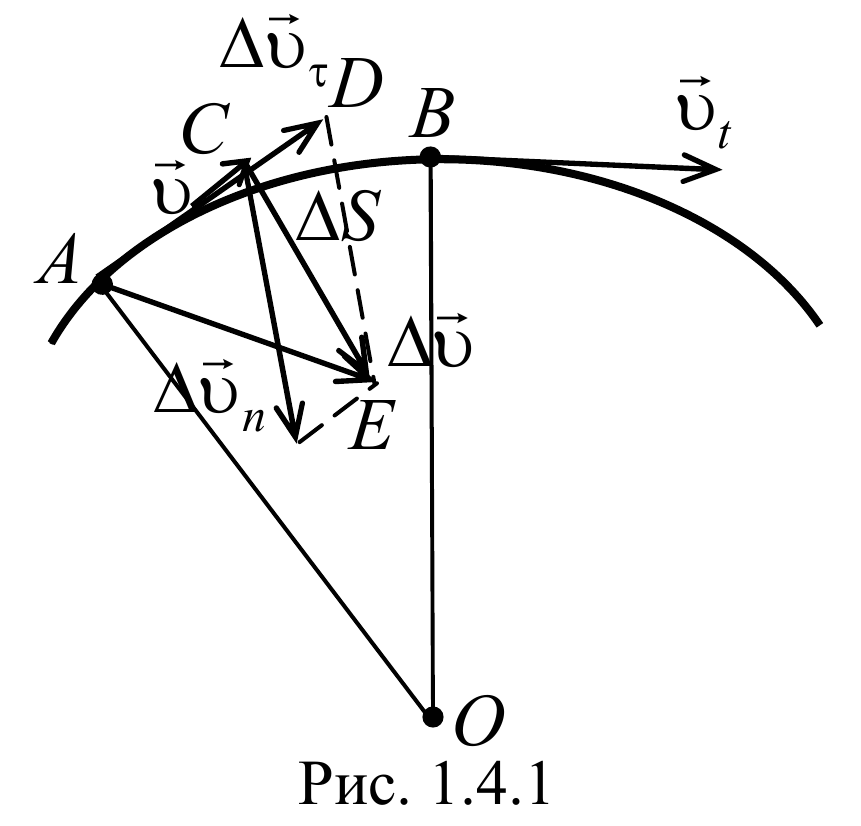

 или
или