Апериодическое (инерционное, статическое) звено. Передаточная функция и уравнения

Дифференциальное уравнение, описывающее взаимосвязь входного и выходного сигналов апериодического типового динамического звена (ТДЗ), можно представить в следующем виде:

Где: k – коэффициент передачи, Т0 – постоянная времени.
Дифференциальное уравнение является не самой удобной формой представления математической модели объекта или звена. Это связано с тем, что решения любого дифференциального уравнения довольно сложная вычислительная процедура. Более удобна и, соответственно чаще используемая, математическая модель объекта, записанная в виде передаточной функции.
Передаточная функция – это преобразованное по Лапласу исходное дифференциальное уравнение, то есть уравнение, записанное в виде преобразованных по Лапласу выходного и входного сигналов объекта (звена).
Исходное дифференциальное уравнение в преобразовании Лапласа называют оригиналом, а записанное в операторной форме преобразованное уравнение – его изображением. Суть преобразования Лапласа заключается в замене на функции комплексных переменных Хвых(р) и Хвх(р) функций вещественных переменных Хвых(τ) и Хвх(τ), где р – оператор Лапласа (комплексное число р = ±m±in). Данные функции связываются между собой интегралом Лапласа:

Для большинства используемых в ТДЗ дифференциальных уравнений, чисто формальным условием перехода от оригинала к изображению будут представленные ниже замены:

Использовав приведенное выше условие довольно легко получить изображение, то есть перейти к операторной форме записи дифференциального уравнения апериодического звена.
Оригинал дифференциального уравнения апериодического звена имеет следующий вид:
Операторная форма записи (изображения) уравнения апериодического звена:

Огромным преимуществом данного преобразования является то, что записанное в операторной форме исходное дифференциальное уравнения становится алгебраическим. Но стоит отметить, что если бы все дифференциальные уравнения можно было бы преобразовать по Лапласу, то в математике произошла бы революция, так как решение алгебраических уравнение значительно проще дифференциальных. К сожалению, такое преобразование возможно лишь для ограниченного количества уравнений, в том числе для уравнений типовых динамических звеньев (ТДЗ).
Поскольку уравнение апериодического звена приняло вид алгебраического, то его можно записать следующим образом:

Из полученного выражения достаточно легко выделить отношение Хвых(р) / Хвх(р), которое называется передаточной функцией и для апериодического звена имеет вид:

У каждого типового динамического звена присутствует ряд типовых частотных характеристик: амплитудно-частотную (АЧХ), фазочастотную (ФЧХ), амплитудно-фазовую частотную (АФЧХ или АФХ), логарифмическую амплитудно-частотную (ЛАЧХ), логарифмическую фазочастотную (ЛФЧХ).
На практике чаще всего используется АФЧХ или АФХ.
Амплитудно-фазовая характеристика это вектор, а график АФХ – годограф этого вектора, то есть кривая на комплексной плоскости, которую описывает конец вектора при изменении частоты ω от 0 до ∞. Вектор характеризуется двумя величинами – длина (скаляр или вектор по модулю) и направление (градиент).
Вектор аналитически можно записать в виде двух проекций на действительную и мнимую оси, и выразить эти проекции через угол α:

После использования формулы Эйлера:

Где |W| — длина вектора или вектор по модулю, i – мнимое число:

Аналитическое выражение для любого вектора АФХ любого типичного динамического звена легко получить из передаточной функции, заменив в ней оператор Лапласа р на выражение iω. Где ω – частота колебаний (ω = 2π/Т), Т – период колебаний.
Для апериодического звена амплитудно-фазовая частотная характеристика (АФХ) имеет вид:

Для записи вектора АФХ в виде проекций на действительную и мнимую ось необходимо произвести следующие преобразования:

Изменяя частоту ω от 0 до ∞ можно построить на комплексной плоскости годораф (график вектора АФХ), представляющий из себя полуокружность (рисунок а)), которая располагается в четвертом квадранте комплексной плоскости. Диаметр полуокружности равен коэффициенту k.

На рисунке б) показана типовая переходная функция апериодического звена. Как видно из графика, она изменяется по экспоненциальному закону. У любой экспоненты есть одно прекрасное свойство – если к любой ее точке провести касательную, а затем точку пересечения касательной с асимптотой и точку касания спроецировать на ось времени, то получится один и тот же отрезок времени на оси времени. Эта проекция, которую называют постоянной времени, соответствует значению коэффициента Т0 в АФХ и передаточной функции апериодического звена, а ордината асимптоты, к которой стремится экспонента, соответствует коэффициенту k в передаточной функции. Таким образом, по переходной характеристике апериодического звена довольно легко найти коэффициенты Т0 и k в передаточной функции звена.
Физическим примером апериодического звена может быть конденсатор, при подаче напряжения на который заряд происходит не мгновенно, а с определенной задержкой, или же электродвигатель, который при подаче питания разгоняется не мгновенно, а через какое-то время t. На рисунке в) показан пример установки, которую также можно считать апериодическим звеном (вода – заполняющая бак).
В бак поступает определенное количество воды с расходом Q1. В то же время из бака вытекает вода с расходом Q2. Регулируемый параметр в этой системе Хвых – уровень воды в баке H.
При подаче единичного скачка Q1 (открыли входной вентиль) уровень воды H в баке повышается. При этом растет гиростатическое давление и возрастает Q2. Через некоторое время уровень воды H в баке стабилизируется (экспонента приближается к асимптоте). Способность самостоятельно восстанавливать равновесие, которое присуща объектам, аппроксимируемым апериодическим звеном, за счет стока или притока вещества или энергии называют самовыравниванием. Количество самовыравнивания определяет коэффициент р, равный обратному значению коэффициента k в передаточной функции звена, то есть р = 1/k.
В литературе объекты с передаточной функцией апериодического звена называют статическими.
Дифференциальные уравнения и передаточные функции звеньев и САУ.
При исследовании и расчете САУ исходят из математического описания, происходящих в них процессах. Для линейных САУ широко используется для этой цели операторный метод. Его сущность в том, что исследуемая система разделяется на звенья направленного действия. Совокупность этих звеньев совместно с линиями связи между ними, характеризующими их взаимодействие, образуют структурную схему САР. Они отражают математически динамические свойства системы. Разбиение системы на звенья существенно облегчает их расчет. Процессы, протекающие в САУ, описываются дифференциальными. уравнениями. Задача составления дифференциальных уравнений системы сводится к составлении системы отдельных звеньев. Любое звено автоматической системы предназначено для измерения, усиления или какого-либо другого преобразования сигнала. В связи с этим для любого элемента характерной являются связи между его входным и выходным сигналом. Именно эта связь и может быть представлена дифференциальными уравнением, которое математически выражает физические процессы в звене, т. е. процессы формирования выходного сигнала элемента, при подаче на его вход входного сигнала. Для облегчения исследования сложных систем дифференциальных уравнений, описывающие поведение системы заменяются алгебраическими, с помощью преобразований Лапласа. Если имеется некоторая функция f(t) независимой вещественной переменной t, то преобразование Лапласа, производимое над этой функцией и обращающее ее в функцию F(x), определяются след соотношением
где p-произвольная комплексная величина, имеющая вещественную и мнимую часть. При этом функция f(t) называется оригиналом, а F(p)-изображением функции. Сокращенно преобразования Лапласа обозначаются: 
Для линейных звеньев связь между входным и выходным сигналом может быть описана линейным дифференциальным уравнением следующего вида:

Воспользовавшись преобразованием Лапласа, дифференциальным уравнением (1) может быть представлено в следующем виде:

Левая часть равенства в скобках — выходной операторный полином, правая – входной.
Передаточной функцией звена или системы автоматического управления называется отношение изображения по Лапласу выходной величины к изображению по Лапласу входной величины.

1) При р=0 выражение передаточной функции превращается в коэффициент усиления. W(p)=K.
2) Из выражения передаточной функции видно, что изображение выходной величины равно:

Этим выражением можно пользоваться при определении характера переходных процессов, возникающих в системе, при подаче на ее вход любого произвольно меняющегося входного воздействия. Анализ и синтез систем автоматического управления предполагает предварительное получение информации о виде передаточной функции. Для ряда типовых динамических звеньев передаточные функции являются одинаковыми, отличие может состоять в коэффициенте выражений передаточных функций.
Дата добавления: 2015-10-19 ; просмотров: 5932 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
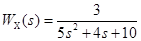
Контрольная работа: Передаточные функции одноконтурной системы
| Название: Передаточные функции одноконтурной системы Раздел: Рефераты по математике Тип: контрольная работа Добавлен 21:52:15 24 декабря 2010 Похожие работы Просмотров: 508 Комментариев: 14 Оценило: 3 человек Средний балл: 5 Оценка: неизвестно Скачать |
 ; б)
; б) .
. .
. .
. .
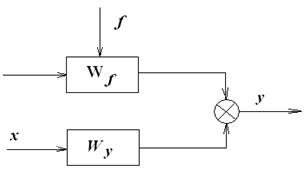
. , то получается уравнение Y(s) = WF(s).F(s). Структурная схема объекта приведена на рис. 1.
, то получается уравнение Y(s) = WF(s).F(s). Структурная схема объекта приведена на рис. 1.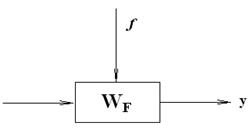
 .
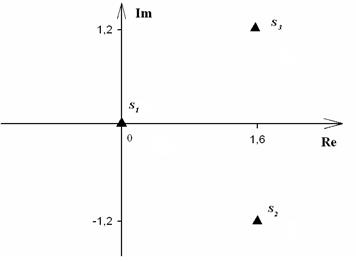
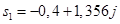
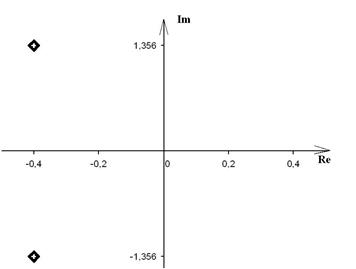
. , корни которого:
, корни которого: ,
,  и
и  .
. .
. .
. и
и  ,
,
 ,
, .
. и
и  .
.
 , получим:
, получим: , тогда:
, тогда: .
.
 .
.
 ;
; .
. .
.
 ;
; — по заданию;
— по заданию; — по ошибке;
— по ошибке; — по возмущению.
— по возмущению.