Дифференциальные уравнения движения материальной точки в теоретической механике
Содержание:
Дифференциальные уравнения движения материальной точки:
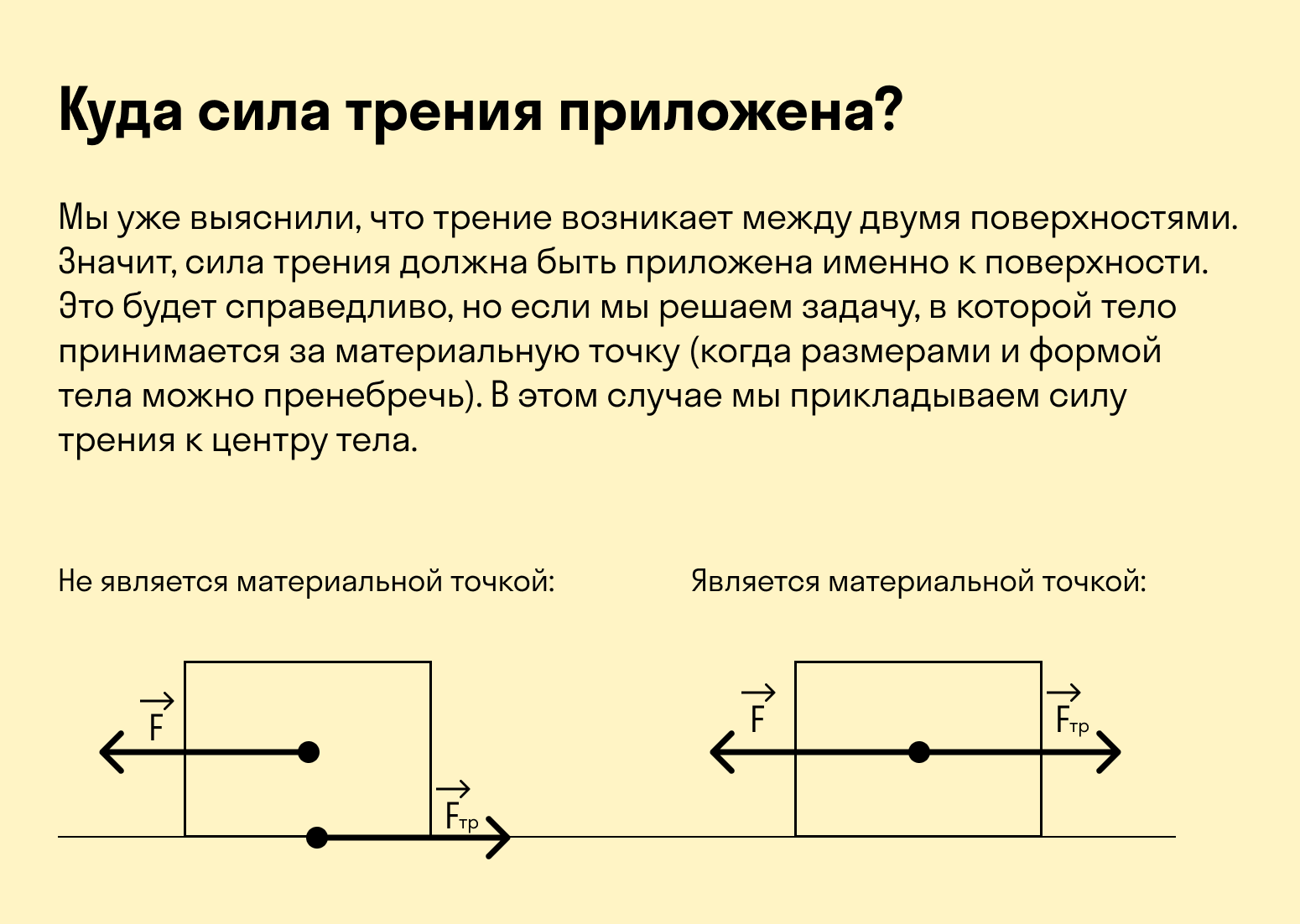
Используя основной закон динамики, можно вывести дифференциальные уравнения движения материальной точки в различных системах координат. По аксиоме о связях и силах реакций связей можно получить дифференциальные уравнения движения и несвободной точки так же, как и для свободной, только ко всем приложенным к точке силам надо добавить силы реакций связей.
Силы реакций связей при движении точки могут зависеть в общем случае не только от вида наложенных на точку связей и приложенных к ней сил, но и от характера ее движения, например от ее скорости при движении в воздухе или в какой-либо другой сопротивляющейся среде. В дальнейшем не будем делать различия между свободной и несвободной материальными точками. Обозначая равнодействующую всех заданных сил и сил реакций связей 

Из кинематики точки известно, что ускорение  выражается через радиус-вектор
выражается через радиус-вектор  (рис. 3):
(рис. 3):

Дифференциальное уравнение движения материальной точки в векторной форме имеет вид

Если спроецировать обе части уравнений (7) или (8) на координатные оси, то можно получить дифференциальные уравнения движения точки в проекциях на эти оси.
В декартовой системе координат в общем случае

Проекции ускорения на координатные оси можно выразить через вторые производные по времени от координат движущейся точки:

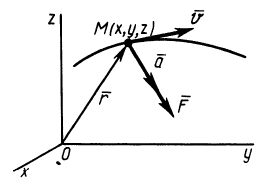
Рис. 3
Дифференциальные уравнения движения материальной точки в прямоугольной декартовой системе координат имеют вид

Частные случаи дифференциального уравнения движения материальной точки
Если известно, что материальная точка движется в одной и той же плоскости, то, принимая ее за координатную плоскость  , имеем
, имеем

Так как  , то, следовательно,
, то, следовательно,  . В случае движения точки по прямой линии, направив по ней координатную ось
. В случае движения точки по прямой линии, направив по ней координатную ось  , получим одно дифференциальное уравнение прямолинейного движения точки
, получим одно дифференциальное уравнение прямолинейного движения точки

Так как при движении  , то, следовательно,
, то, следовательно,  . Для естественных подвижных осей координат (рис. 4), проецируя обе части (7) на эти оси, получаем:
. Для естественных подвижных осей координат (рис. 4), проецируя обе части (7) на эти оси, получаем:

где  и
и  — соответственно проекции ускорения и равнодействующей силы на касательную, главную нормаль и бинормаль к траектории в рассматриваемом положении движущейся точки. Учитывая, что
— соответственно проекции ускорения и равнодействующей силы на касательную, главную нормаль и бинормаль к траектории в рассматриваемом положении движущейся точки. Учитывая, что

где  — радиус кривизны траектории, дифференциальные уравнения движения точки в проекциях на естественные оси имеют вид
— радиус кривизны траектории, дифференциальные уравнения движения точки в проекциях на естественные оси имеют вид
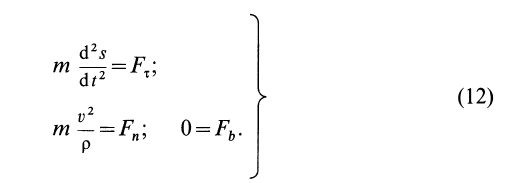
Второе уравнение из (12) можно преобразовать:

где  — угловая скорость вращения касательной к траектории движущейся точки и, следовательно,
— угловая скорость вращения касательной к траектории движущейся точки и, следовательно,  — угол смежности между касательными в двух бесконечно близких точках.
— угол смежности между касательными в двух бесконечно близких точках.
Дифференциальные уравнения (12) можно представить в виде

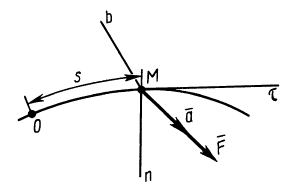
Рис. 4
Эта форма дифференциальных уравнений движения точки удобна при исследовании некоторых случаев полета снарядов и ракет, особенно по траектории, лежащей в плоскости. Тогда  будет углом между касательной к траектории и любой осью, лежащей в плоскости траектории.
будет углом между касательной к траектории и любой осью, лежащей в плоскости траектории.
Дифференциальные уравнения движения точки можно представить в любой другой системе координат. Для этого надо знать выражения проекций ускорения на эти оси координат.
Дифференциальные уравнения относительного движения точки
Кориолисовыми силами инерции называют две векторные величины, имеющие размерность силы и добавляемые к силам, приложенным к материальной частице, для определения ее относительного ускорения
Все дифференциальные уравнения движения, с которыми мы ознакомились в этой главе, относятся к абсолютному движению, т. е. к движению по отношению к инерциальной системе отсчета. Для написания дифференциальных уравнений движения точки (или частицы) относительно подвижных осей подставим в основное уравнение динамики (123) вместо абсолютного ускорения точки его выражение (110):


 (153)
(153)
имеющую размерность силы, равную произведению массы материальной частицы на ее переносное ускорение и направленную противоположно этому ускорению, называют переносной силой инерции Кориолиса.
 (154)
(154)
равную произведению массы материальной частицы на ее кориолисово ускорение и направленную противоположно этому ускорению, называют поворотной силой инерции Кориолиса.
 (155 / )
(155 / )
или в проекциях на оси координат:
 (155)
(155)
Таким образом, относительное движение материальной точки можно описать такими же (по форме) дифференциальными уравнениями, как и абсолютное, но к действующим на точку силам нужно прибавить две кориолисовы силы инерции: переносную и поворотную.
Эти величины следует отличать от даламберовых сил инерции (см. гл. XX), введение которых позволяет решать задачи динамики методом статики.
Пример решения задачи №1
Определить амплитуду вынужденных колебаний в относительном движении вибрографа для записи вертикальных колебаний фундамента (рис. 171), совершающего вместе с фундаментом колебания по закону χ = a sin pt, если вес груза равен G и жесткость пружины с.
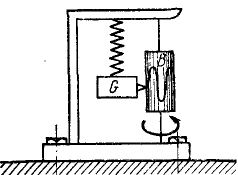
Рис. 171
Решение. Рама жестко соединена с фундаментом и участвует в его колебаниях, как и вращающийся барабан В, на котором груз G, перемещаясь вверх и вниз, записывает колебания фундамента. Вертикальные перемещения х’ груза G по отношению к раме являются относительными и по отношению к барабану, если пренебречь его вращением. Уравнение этих относительных перемещений можно составить как уравнение абсолютного движения, если к заданным силам добавить переносную кориолисову силу, равную и противоположную произведению вектора переносного ускорения на массу груза. Переносная сила инерции груза равна
Напишем дифференциальное уравнение относительных колебаний груза, сократив на m:
x’ + k 2 χ’ = ар 2 sin pt.
где  Пренебрегая свободными колебаниями груза, напишем уравнение (149′) установившегося вынужденного колебания груза:
Пренебрегая свободными колебаниями груза, напишем уравнение (149′) установившегося вынужденного колебания груза:
Амплитуда этих колебаний тем менее отличается от амплитуды колебаний фундамента, чем меньше собственная частота k прибора сравнительно с частотой р, т. е. чем меньше жесткость пружины и чем больше масса груза.
Ответ. 
Пример решения задачи №2
Ползун G (рис. 172) может скользить по хорде AB равномерно вращающегося горизонтального диска, к точкам А и В которой он прикреплен двумя одинаковыми пружинами жесткостью  каждая. Принимая ползун за точку массы т и пренебрегая трением, определить зависимость периода τ его колебаний в относительном движении по хорде от угловой скорости ω диска.
каждая. Принимая ползун за точку массы т и пренебрегая трением, определить зависимость периода τ его колебаний в относительном движении по хорде от угловой скорости ω диска.
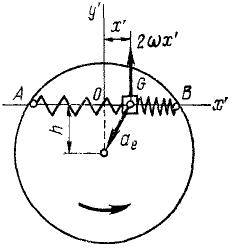
Рис. 172
Решение. Построим оси подвижной системы координат с началом в точке О (в положении относительного равновесия ползуна), направив Ox’ но хорде.
Определим силы, действующие на ползун. Если ползун отклонится от равновесного положения О на величину х’, то одна из пружин сожмется, а другая растянется. Согласно закону Гука сила каждой из пружин пропорциональна деформации х’ и направлена к точке О. Следовательно, на ползун действует активная сила

Кроме активной силы, надо учесть действие кориолисовых сил: Φe—переносной и Φc-поворотной.
Переносная сила инерции равна произведению массы т ползуна на его переносное ускорение:  и направлена против переносного ускорения, т. е. от центра C диска. Чтобы определить проекцию этой силы на Ox’, надо ее модуль умножить на направляющий косинус, который при OG = х’ равен
и направлена против переносного ускорения, т. е. от центра C диска. Чтобы определить проекцию этой силы на Ox’, надо ее модуль умножить на направляющий косинус, который при OG = х’ равен  .
.
Поворотная сила Кориолиса равна произведению массы ползуна иа кориолисово ускорение 2ωx’ и направлена против этого ускорения. Таким образом, чтобы определить направление поворотной силы Кориолиса, надо вектор относительной скорости повернуть на 90° против переносного вращения. Находим, что поворотная сила инерции действует перпендикулярно AB и проекция ее на Ox’ равна нулю.
При найденных значениях активных сил и кориолисовых сил дифференциальное уравнение относительного движения ползуна по хорде имеет вид:
mх’ = — cx’ + mω 2 x’= — (с—mω 2 )x’.
Это уравнение выражает гармоническое колебание с периодом 
Ответ.  и не зависит от положения хорды.
и не зависит от положения хорды.
Пример решения задачи №3
Составить дифференциальное уравнение относительного движения ползуна, описанного в предыдущей задаче, считая, что при его движении вдоль хорды AB возникает трение, пропорциональное нормальному давлению на хорду.
Решение. Нормальное давление обусловлено поворотной силой инерции и нормальной составляющей переносной силы инерции.
Поворотная сила ползуна Φс=2mωx’ переменна по величине и направлению. Она направлена перпендикулярно к хорде AB, но в сторону положительных значений у’, если точка G движется в сторону отрицательных значений х’, т. е, если х’ 2 h. Эта составляющая в рассматриваемом механизме всегда направлена в сторону положительных у’, а потому в суммарном давлении обе кориолисовы силы складываются при х’ 0, и дифференциальное уравнение относительного движения точки имеет вид
mх’ =— (с—mω 2 ) x’ — fm (2ωx’ ± ω2h),
причем знак второго слагаемого в скобках надо брать положительным при х’ 0. Решение такого уравнения при движении точки G влево и вправо получается, конечно, различным. Если Л — 0 и хорда является диаметром, то вместо кулонова трения получается вязкое демпфирование, зависящее от скорости.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Две основные задачи динамики точки
- Прямолинейное движение точки
- Криволинейное движение материальной точки
- Движение несвободной материальной точки
- Сложное движение точки
- Сложение движение твердого тела
- Кинематика сплошной среды
- Аксиомы классической механики
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
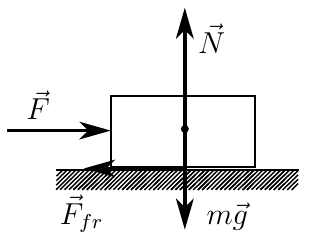
Сила трения
О чем эта статья:
Сила трения: величина, направление
С силой трения вы сталкиваетесь буквально каждую секунду. Каждый раз, когда вы взаимодействуете с любой поверхностью — идете по асфальту, сидите на стуле, пьете чай из чашки — на вас действует сила трения.
Трение — это и есть взаимодействие в плоскости соприкосновения двух поверхностей.
Чтобы перевести трение на язык физики, вводится понятие сила трения.
Сила трения — это величина, которая характеризует процесс трения по величине и направлению.
Измеряется сила трения, как и любая сила — в Ньютонах.
Возникает сила трения по двум причинам:
- Различные шероховатости, царапины и прочие «несовершенства» поверхностей. Эти дефекты задевают друг друга при соприкосновении и создается сила, тормозящая движение.
- Когда контактирующие поверхности практически гладкие (до идеала довести невозможно, но стремиться к нему — значит устремлять силу трения к нулю), то расстояние между ними становится минимальным. В этом случае возникает взаимное притяжение молекул вещества этих поверхностей. Притяжение обусловлено взаимодействием между электрическими зарядами атомов. В связи с этим можно часто услышать формулировку «Сила трения — сила электромагнитной природы»
Направлена сила трения всегда против скорости тела. В этом плане все просто, но всегда есть вопрос:
В задачах часто пишут что-то вроде: «Поверхность считать идеально гладкой». Это значит, что сила трения в данной задаче отсутствует. Да, в реальной жизни это невозможно, но во имя красивой математической модели трением часто пренебрегают.
Не переживайте из-за этой несправедливости, а просто решайте задачи без трения, если увидели словосочетание «гладкая поверхность».
Сухое и вязкое трение
Есть очень большая разница между вашим соприкосновением с водой в бассейне во время плавания и соприкосновением между асфальтом и колесами вашего велосипеда.
В случае с плаванием мы имеем дело с вязким трением — явлением сопротивления при движении твердого тела в жидкости или воздухе. Самолет тоже подвергается вязкому трению и вон тот наглый голубь из вашего двора.
А вот сухое трение — это явление сопротивления при соприкосновении двух твердых тел. Например, если школьник ерзает на стуле или злодей из фильма потирает ладоши — это будет сухое трение.
Вязкое трение в школьном курсе физики не рассматривается подробно, а вот сухое — разбирают вдоль и поперек. У сухого трения также есть разновидности, давайте о них поговорим.
Трение покоя
Если вы решите сдвинуть с места грузовик, вряд ли у вас это получится. Не то, чтобы мы в вас не верим — просто это невозможно сделать из-за того, что масса человека во много раз меньше массы грузовика, да еще и сила трения мешает это сделать. Мир жесток, что тут поделать.
В случае, когда сила трения есть, но тело не двигается с места, мы имеем дело с силой трения покоя.
Сила трения покоя равна силе тяги. Например, если вы пытаетесь сдвинуть с места санки, действуя на них с силой тяги 10 Н, то сила трения будет равна 10 Н.
Сила трения покоя
Fтр — сила трения покоя [Н]
Fтяги — сила тяги [Н]
Задача
Найти силу трения покоя для тела, на которое действуют сила тяги в 4 Н.
Решение:
Тело покоится, значит
Fтр = F тяги = 4 Н
Ответ: сила трения равна 4 Н.
Трение скольжения
А теперь давайте скользить на коньках по льду. Каток достаточно гладкий, но, как мы уже выяснили, сила трения все равно будет присутствовать и вычисляться будет по формуле:
Сила трения скольжения
Fтр = μN
Fтр — сила трения скольжения [Н]
μ — коэффициент трения [—]
N — сила реакции опоры [Н]
Сила трения, которую мы получим по этой формуле будет максимально возможной — то есть больше уже некуда.
Сила реакции опоры — это сила, с которой опора действует на тело. Она численно равна силе нормального давления и противоположна по направлению.
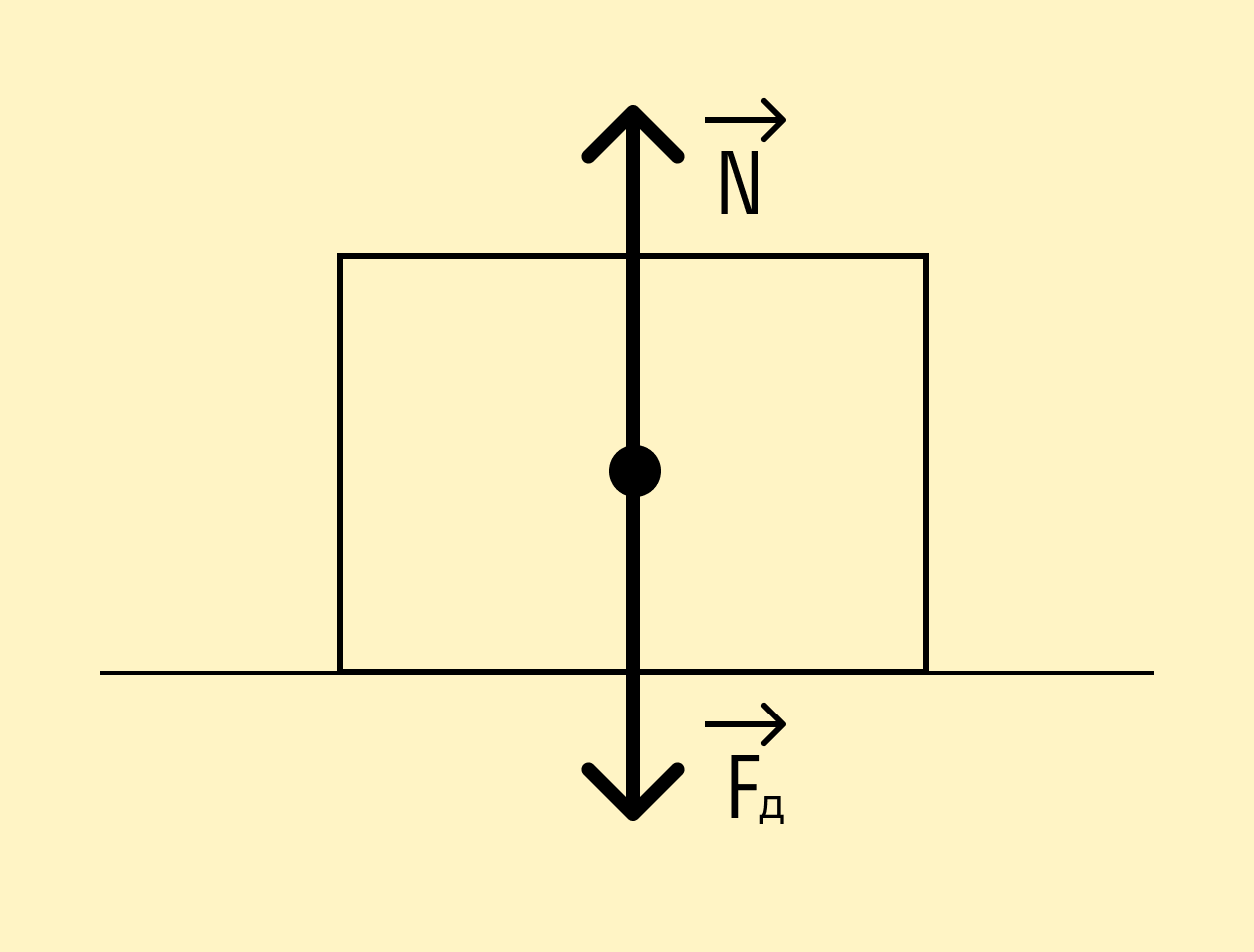
Не совсем. Сила нормального давления направлена всегда перпендикулярно поверхности (нормаль — перпендикуляр к поверхности). Вес не обязательно направлен перпендикулярно поверхности.
В рамках школьного курса вес всегда направлен перпендикулярно поверхности, поэтому силу реакции опоры можно численно приравнивать к весу.
Подробнее про вес тела читайте в нашей статье😇
Также, если тело находится на горизонтальной поверхности, сила реакции опоры будет равна силе тяжести: N = mg.
Коэффициент трения — это характеристика поверхности. Он определяется экспериментально, не имеет размерности и показывает, насколько поверхность гладкая — чем больше коэффициент, тем более шероховатая поверхность. Коэффициент трения положителен и чаще всего меньше единицы.
Задача 1
Масса котика, лежащего на столе, составляет 5 кг. Коэффициент трения µ = 0,2. К коту прилагают внешнюю силу, равную 2,5 Н. Какая сила трения при этом возникает?
Решение:
По условию данной задачи невозможно понять, двигается наш котик или нет. Решение о том, приравниваем ли мы к силе тяги силу трения, принять сразу нельзя. В таких случаях нужно все-таки рассчитать по формуле:
Так как котик лежит на горизонтальной поверхности, сила реакции опоры в данном случае равна силе тяжести: N = mg.
F = μmg = 0,2 · 5 · 10 = 10Н
Мы получили максимально возможную силу трения. Внешняя сила по условию задачи меньше максимальной. Это значит, что котик находится в покое. Сила трения уравновешивает внешнюю силу. Следовательно, она равняется 2,5 Н.
Ответ: возникает сила трения величиной 2,5 Н
Задача 2
Барсук скользит по горизонтальной плоскости. Найти коэффициент трения, если сила трения равна 5 Н, а сила давления тела на плоскость — 20 Н.
Решение:
В данной задаче нам известно, что барсучок скользит. Значит нужно воспользоваться формулой:
Так как барсук находится на горизонтальной поверхности, сила реакции опоры в данном случае равна силе давления на плоскость: N = Fд.
Выражаем коэффициент трения:
Ответ: коэффициент трения равен 0,25
Задача 3
Пудель вашей бабушки массой 5 кг скользит по горизонтальной поверхности. Сила трения скольжения равна 20 Н. Найдите силу трения, если пудель сильно похудеет, и его масса уменьшится в два раза, а коэффициент трения останется неизменным.
Решение:
В данной задаче нам известно, что пудель скользит. Значит, нужно воспользоваться формулой:
Так как пудель находится на горизонтальной поверхности, сила реакции опоры в данном случае равна силе тяжести: N = mg.
Выразим коэффициент трения:
μ = Fтр / mg = 20 / 5 · 10 = 0,4
Теперь рассчитаем силу трения для массы, меньшей в два раза:

Ответ: сила трения будет равна 10 Н.
Задача 4
Ученик провел эксперимент по изучению силы трения скольжения, перемещая брусок с грузами равномерно по горизонтальным поверхностям с помощью динамометра.
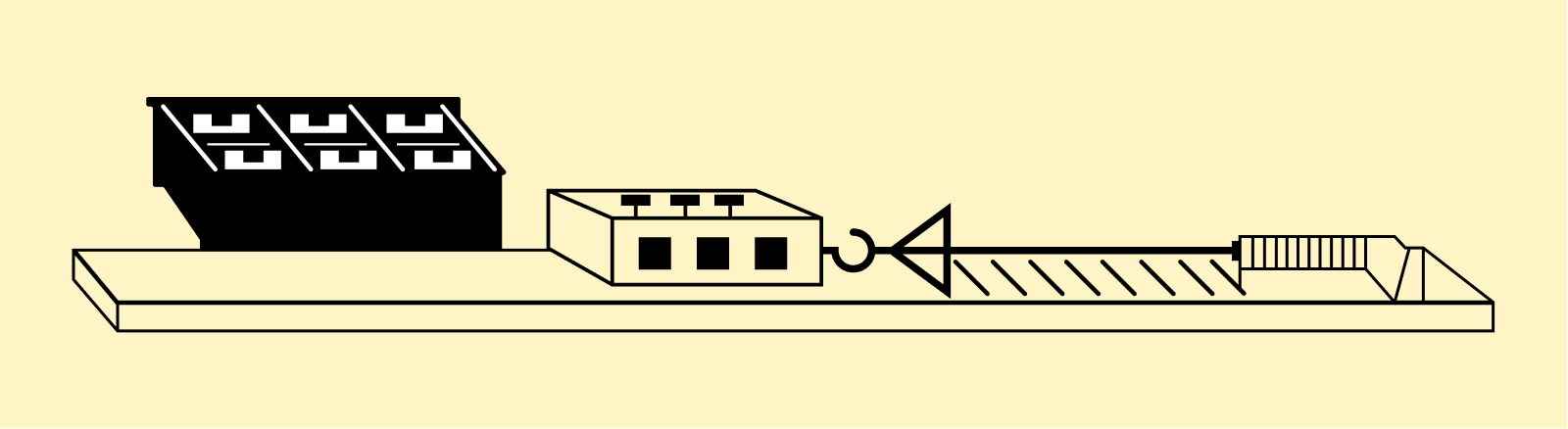
Результаты экспериментальных измерений массы бруска с грузами m, площади соприкосновения бруска и поверхности S и приложенной силы F представлены в таблице.
Формализм Лагранжа в задачах с сухим трением
Данная статья являет собой логическое продолжение темы, начатой в предыдущей публикации . Как и было обещано в комментариях, рассмотрим применимость метода избыточных координат к динамическому анализу механических систем движущихся под действием сил сухого кулоновского трения. В качестве иллюстративного примера решим следующую задачу

Тонкий однородный стержень массы m = 2 кг, длины AB = 2l = 1 м в точке A шарнирно прикреплен к невесомому ползуну, перемещающемуся в горизонтальных шероховатых направляющих. В начальный момент времени стержень расположен вертикально, затем его отклоняют от вертикали на ничтожно малый угол и отпускают без начальной скорости. Необходимо составить уравнения движения данной механической системы и найти закон её движения. Коэффициент трения между ползуном и направляющими равен f = 0,1.
Прежде чем приступить к решению задачи предлагаемым автором методом, рассмотрим немножко элементарной теории, касающейся сухого трения.
1. Что может быть «проще» трения?
Нет более страшного наказания для механика, чем сила трения. Появляясь в задаче, эта сила сразу делает её существенно нелинейной, ибо ведет себя достаточно интересным образом.
Рассмотрим довольно простой пример. Пусть на шероховатой поверхности покоится горизонтальный брусок.
Пусть в начале к нему не прилагают никаких сил (кроме силы тяжести и нормальной реакции). В этом случае и сила трения между бруском и плоскостью будет равна нулю.
Теперь приложим к бруску небольшую горизонтальную силу. Брусок не сдвинется с места, так как в ответ на наше воздействие со стороны поверхности на него станет действовать сила трения, которая будет удовлетворять условию

Будем постепенно увеличивать силу  и, согласно (1) расти будет и сила трения, которая в этом случае называется силой трения покоя. Так будет продолжаться до тех пор, пока сила трения покоя не достигнет величины
и, согласно (1) расти будет и сила трения, которая в этом случае называется силой трения покоя. Так будет продолжаться до тех пор, пока сила трения покоя не достигнет величины

называемой предельной величиной силы трения покоя. Здесь f — коэффициент сухого трения между бруском и плоскостью; N — нормальная реакция со стороны плоскости. После этого сила трения расти перестанет, а при дальнейшем увеличении горизонтальной силы начнется скольжение бруска. Сила трения перейдет в силу трения скольжения, равную

где  — скорость бруска.
— скорость бруска.
Пример весьма тривиальный, однако он раскрывает суть поведения силы сухого трения. Таким образом, получаем следующий алгоритм расчета силы трения:
Если точка, где приложена сила трения неподвижна:
- Расчитываем силу трения покоя и нормальную реакцию
- Проверяем условие

при нарушении которого принимаем силу трения равной предельной силе трения покоя

Если точка приложения силы трения движется:
- Вычисляем нормальную реакцию
- Вычисляем силу трения скольжения, согласно выражению (2)
2. Моделирование движения системы с трением
Теперь решим нашу задачу. Рассматриваемая нами система имеет две степени свободы, однако из-за необходимости определения нормальной реакции расширяем число степеней свободы до трех и получаем следующую расчетную схему

Здесь в качестве обобщенных координат берем вектор

где x,y — координаты точки A;  — угол наклона стержня к вертикали. Вооружаемся Maple’ом
— угол наклона стержня к вертикали. Вооружаемся Maple’ом
Определяемся с кинематикой системы
Вычисляем её кинетическую энергию
Maple выдает такой результат

Довольно громоздко, но «ковырять» нам не руками на листочке, поэтому двигаемся дальше. Задаем векторы и точки приложения сил
Получаем уравнения движения системы в форме Лагранжа 2 рода
Получаем трёх «крокодилов»



Эти уравнения пришлось вбить в статью руками, ибо «копипаста» LaTeX-вывода Maple приводит к неприглядному виду результата. Но даже так видно — уравнения сложны и с учетом того что F — это сила трения, аналитически не интегрируемы.
Теперь введем уравнения связей. Во-первых, ползун движется по горизонтальным направляющим, поэтому

Кроме того, в том случае когда ползун неподвижен, а сила трения покоя не превысила предельного значения, включается ещё одна связь

где  — некоторая горизонтальная координата ползуна. Теперь преобразуем систему (4) — (6) с учетом уравнений (7) и (8) и найдем силу трения покоя и нормальную реакцию
— некоторая горизонтальная координата ползуна. Теперь преобразуем систему (4) — (6) с учетом уравнений (7) и (8) и найдем силу трения покоя и нормальную реакцию
Тут приведу результат непосредственно выданный Maple


Если посмотреть на полученные выражения, то они вполне соответствуют логике процесса. Теперь получим выражение для расчета нормальной реакции в случае, когда ползун скользит по направляющим, учитывая, что в этом случае сила трения будет определятся выражением

(минус уже имеется в уравнениях движения)
М-да, «крокодилище» вышел ещё тот, особенно с учетом что Maple таки довольно избыточно генерирует LaTeX-код

Все необходимые нам выражения получены, теперь можно переходить к моделированию. В отличие от задачи с маятником, о которой я уже писал, тут мы честно трансформируем наши уравнения Maple-средствами для вида пригодного к численному решению. Прежде всего решим уравнения (4) — (6) относительно обобщенных ускорений
Результат уже не буду приводить — он тоже довольно громоздкий. Перейдем к фазовым координатам
Формируем функции вычисления необходимых нам сил
Приведенный код хоть и объемный, но довольно прост — выполняется подстановка численных параметров в соответствующие выражения и их вычисление. Такую же функцию формируем и для вычисления обобщенных ускорений
Задаем параметры, данные нам в условии задачи
Время задать основную логику модели, которая определяет расчет силы трения. При этом задаемся погрешностью скорости ползуна, при которой будем считать её равной нулю.
Определяем callback для решателя:
Формируем для решателя список фазовых координат и начальные условия (угол отклонения стержня от вертикали делаем малым) и выполняем численное интегрирование (на самом деле последний вызов dsolve() лишь обозначает наши намерения по численному решению — оно будет поизведено при вычислении конкретных значений фазовых координат).
Выполняем некоторые подготовительные операции
Далее просчитаем движение системы в течение некоторого интервала времени и сформируем массивы данных для вывода на графики
Ну вот, у нас практически всё готово
Получаем графики. Красоты ради, графики были конвертированы из Maple в *.eps и немножко обработаны в inkscape.
Перемещение ползуна 
Угол отклонения стержня от вертикали 
Сила трения 
Здесь синей линией показано предельное значение трения покоя, а красной — фактическое значение силы трения.
Нормальная реакция со стороны направляющих 
Видно, что ползун покоится в течение чуть более двух секунд, а затем, после преодоления трения покоя приходит в движение, которое постепенно затухает и полностью прекращается через 6,5 секунд после начала движения. После этого сила трения никогда не превышает предельного для покоя значения, ползун остается на месте, а стержень совершает гармонические колебания около устойчивого положения равновесия.
Заключение
Рассмотрено применение метода избыточных координат и уравнений Лагранжа 2 рода к анализу движения систем с сухим трением. Видно, что при внешней громоздкости получаемых результатов, процес синтеза уравнений движения может быть автоматизирован средствами символьной математики, а это существенно для современных технических задач.
http://skysmart.ru/articles/physics/sila-treniya
http://habr.com/ru/post/245211/