iSopromat.ru

Момент силы относительно точки (или центра) — вращательный эффект силы, характеризующий вращение твердого тела вокруг некоторой точки под действием приложенной силы.
Определение
Моментом силы относительно точки (рисунок 1.1) называется векторное произведение радиус-вектора точки приложения силы на вектор силы.
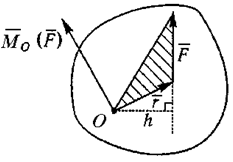
Вектор момента направлен перпендикулярно плоскости, в которой лежат сила и точка, в ту сторону, откуда поворот от действия силы виден происходящим против хода часовой стрелки.
Наш короткий видеоурок про момент силы с примерами:

Вычисление момента
Вектор момента характеризует положение плоскости и направление вращательного действия силы, а также дает меру этого действия:
где h – плечо силы (кратчайшее расстояние от точки O – центра момента – до линии действия силы). Если сила проходит через точку, то ее момент относительно этой точки равен нулю.
Момент силы относительно точки не меняется от переноса силы вдоль линии ее действия.
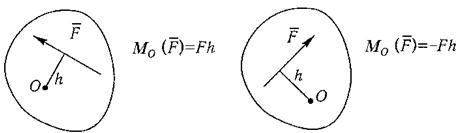
Если силы расположены в одной плоскости, то используется понятие алгебраического момента силы.
Алгебраическим моментом силы относительно точки (или центра) называется взятое со знаком плюс или минус произведение модуля силы на плечо (рисунок 1.2).
Правило знаков
Если сила F задана своими проекциями на оси координат Fx, Fy, Fz и даны координаты x, y, z точки приложения этой силы, то момент силы относительно начала координат вычисляется следующим образом:
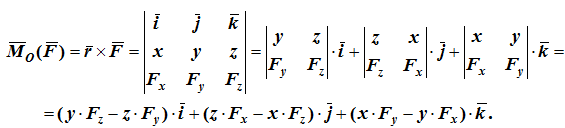
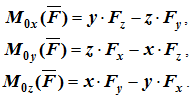
Проекции момента силы на оси координат равны:
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах

Решение задач, контрольных и РГР
Стоимость мы сообщим в течение 5 минут
на указанный вами адрес электронной почты.
Если стоимость устроит вы сможете оформить заказ.
НАБОР СТУДЕНТА ДЛЯ УЧЁБЫ
— Рамки A4 для учебных работ
— Миллиметровки разного цвета
— Шрифты чертежные ГОСТ
— Листы в клетку и в линейку
Моменты в теоретической механике
Вы будете перенаправлены на Автор24
Теоретическая механика представляет раздел физики, в котором изложены основные законы механических взаимодействий и движений материальных тел.
Понятие момента силы в теоретической механике
В теоретической механике говорится о таком понятии, как момент силы. Он представляет собой величину, характеризующую вращательную способность силы.
Парой сил считается система двух параллельных, противоположно направленных и равнозначных по модулю сил: $\vec
Системой сил является комплекс сил, оказывающих непосредственное воздействие на механическую систему. Плоскую систему при этом представляют силы, чьи линии действия лежат в одной плоскости. Пространственную систему – силы, у которых линии действия не лежат в одинаковой плоскости.
Систему сходящихся сил представляют силы, чьи линии действия будут пересекаться в одной точке. В произвольной системе линии действия сил не будут пересекаться в одной точке.
Равновесное состояние характеризует такое положение, тело при котором в момент действия сил или сохраняет неподвижность, или движется равномерным и прямолинейным образом.
Уравновешенной системой сил считается такая система, которая, прилагаясь к свободному твердому телу, сохраняет неизменность его механического состояния (то есть не выводит из равновесия). Равнодействующей силой будет та сила, чье воздействие на тело эквивалентно действиям системы сил.
Проекцию силы на ось представляет заключенный между перпендикулярами отрезок. При этом они проведены из начала и конца вектора силы к данной оси. Проекция положительная при совпадении направленности отрезка и положительного направления оси. Проекцию силы на плоскость представляет вектор на плоскости между перпендикулярами, которые проведены из начала и конца вектора силы к такой плоскости.
Готовые работы на аналогичную тему
Момент силы относительно оси
Моментом силы относительно оси будет считаться момент проекции такой силы на перпендикулярную оси плоскость в отношении точки их пересечения.
Момент окажется положительным при условии, что поворот, совершаемый силой, осуществляется против часовой стрелки, и отрицательным – если против, записывается это формулой:
$M_z (\vec
Для нахождения момента силы относительно оси нужно:
- провести перпендикулярно оси $z$ плоскость и спроецировать на нее силу $F$;
- спроецировать силу $F$ на вышеуказанную плоскость с последующим вычислением величины проекции $F_xy$;
- провести $h$ (плечо) из точки, где пересекается ось с плоскостью, на линию действия проекции $F_xy$ с последующим определением его длины;
- вычислить произведение этого плеча, а также — проекции силы с соответствующим знаком.
Нулевое значение момент силы относительно оси обретает в том случае, когда $F_xy=0$ (при параллельности силы $F$ оси). Второе условие заключается в том, что линия действия силы будет пересекать ось, т.е. $h=0$.
Равнодействующую $R$ двух сходящихся сил находят по аксиоме параллелограмма сил. Геометрическую сумму любого числа сходящихся сил вычисляют посредством последовательного суммирования двух сил (способом векторного многоугольника).
Таким образом, систему сходящихся сил $\vec
Аналитически равнодействующую силу определяют ее проекцией на оси координат:
Исходя из теоремы, проекция равнодействующей на ось вычисляется формулой:
С учетом этого, равнодействующую определяет выражение:
Действие системы для сходящихся сил будет эквивалентным действию одной равнодействующей силы. Условием равновесия тела считается нулевое значение равнодействующей, т.е. $\vec
Из формулы $R=\sqrt<(\sum
Необходимым условием равновесия для плоской будет нулевое значение суммы проекций всех сил на оси $X$, $Y$:
Момент силы относительно точки
Абсолютное значение момента в теоретической механике вычисляется формулой: $M_0(\vec
При положительном моменте сила вращает плечо $h$ против часовой стрелки, а при отрицательном – по часовой.
Согласно свойствам момента силы относительно точки, он сохраняет свою неизменность, если точка приложения силы переносится вдоль линии ее действия. Еще одно свойство проявляется в том, что момент равнодействующей силы относительно точки определяет сумма моментов слагаемых сил в отношении этой точки:
Момент пары сил
Момент пары сил определяет формула: $M(\vec
Момент пары окажется положительным при стремлении сил к вращению плеча против часовой стрелки. Свойства пары сил выражены в: нулевом значении суммы проекций сил на ось; неизменности момента пары при одновременном изменении значения сил и плеча пары, возможности переноса пары в плоскости ее действия при неизменности действия пары на тело.
Момент силы относительно точки будет выражать следующая формула: $M_0(\vec
Свойства момента силы в отношении точки выражаются в следующем: его неизменности в момент переноса точки приложения силы вдоль линии ее действия; момент равнодействующей силы в отношении точки представляет суммарное значение моментов слагаемых сил относительно нее: $M_0(\vec
Приложенную к твердому телу силу возможно перенести. При этом будет неизменным оказываемое ею действие, а перенос осуществляется параллельно в другую точку тела. Также при этом добавляется пара сил с моментом, равнозначным переносимой силе относительно точки, куда она переносится. Вследствие вышеуказанного преобразования мы наблюдаем формирование сходящейся системы сил и суммы моментов пар сил. Действие такой системы заменяют действия суммарной силы, а действие моментов — суммарный момент.
Суммарный вектор $\vec
Итогом становится тождественное преобразование произвольной системы сил в главный вектор и момент такой системы. Аналитически главный вектор и момент системы могут определяться их проекциями на оси координат:
Момент силы относительно точки

Момент силы относительно точки
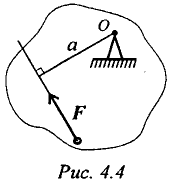
Сила, не проходящая через точку крепления тела, вызывает вращение тела относительно точки, поэтому действие такой силы на тело оценивается моментом.
Момент силы относительно точки численно равен произведению модуля силы на расстояние от точки до линий действия силы. Перпендикуляр, опущенный из точки на линию действия силы (рис. 4.4), называется плечом силы.
Обозначение момента  или
или  ;
;

Единица измерения 
Момент считается положительным, если сила разворачивает тело по часовой стрелке.
Примечание. В разных учебных пособиях знак момента назначается по-разному.
Момент силы относительно точки равен нулю, если линия действия силы проходит через точку, т. к. в этом случае расстояние от точки до силы равно нулю.
Эта теория взята со страницы решения задач по предмету «техническая механика»:
Возможно эти страницы вам будут полезны:



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
http://spravochnick.ru/fizika/teoreticheskaya_mehanika/momenty_v_teoreticheskoy_mehanike/
http://lfirmal.com/moment-silyi-otnositelno-tochki/