Дифференциальное уравнение движения системы в теоретической механике
Дифференциальное уравнение движения системы:
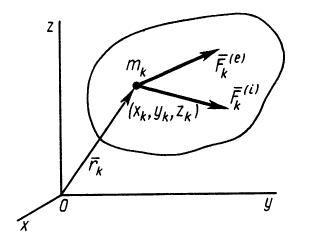
Пусть даны внешние и внутренние силы, действующие на систему, состоящую из 

Систему дифференциальных уравнений (3) называют дифференциальными уравнениями движения механической системы в векторной форме. Если спроецировать векторные дифференциальные уравнения (3) на прямоугольные декартовы оси координат, то получим систему дифференциальных уравнений, описывающих движение точек механической системы. Для нахождения движения механической системы по заданным силам и начальным условиям для каждой точки системы нужно проинтегрировать, следовательно, систему  дифференциальных уравнений. Эту задачу не удается точно решить в общем случае даже для одной точки. Она исключительно трудна в случае двух материальных точек, которые движутся только под действием сил взаимодействия по закону всемирного притяжения (задача о двух телах) и совершенно неразрешима в случае трех взаимодействующих точек (задача о трех телах).
дифференциальных уравнений. Эту задачу не удается точно решить в общем случае даже для одной точки. Она исключительно трудна в случае двух материальных точек, которые движутся только под действием сил взаимодействия по закону всемирного притяжения (задача о двух телах) и совершенно неразрешима в случае трех взаимодействующих точек (задача о трех телах).
Задача интегрирования дифференциальных уравнений механической системы еще сложнее, если на механическую систему наложены связи, силы реакций которых заранее не известны и должны быть дополнительно определены по заданным силам и связям аналогично случаю движения несвободной материальной точки по поверхности и кривой линии.
В некоторых случаях из дифференциальных уравнений движения системы можно получить первые интегралы, т. е. соотношения, в которые не входят производные второго порядка от координат по времени.
Если известны первые интегралы, то задача интегрирования системы дифференциальных уравнений облегчается. Хотя отдельные первые интегралы и не могут полностью описать движения всех точек системы, однако они иногда характеризуют важные стороны движения системы в целом.
Первые интегралы системы дифференциальных уравнений удобно получать из так называемых общих теорем динамики, когда выполняются некоторые дополнительные условия для действующих сил. Кроме того, общие теоремы динамики, даже когда по ним нельзя определить первые интегралы, дают ценную информацию о движении точки или системы. В некоторых задачах, где не требуется полного знания движения системы, эти сведения могут оказаться достаточными.
Общие теоремы динамики являются следствиями системы дифференциальных уравнений движения точки или соответственно системы точек.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Теоремы об изменении количества движения и о движении центра масс
- Теорема об изменении кинетического момента
- Теорема об изменении кинетической энергии
- Потенциальное силовое поле
- Движение несвободной материальной точки
- Относительное движение материальной точки
- Геометрия масс
- Свойства внутренних сил системы
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Составление дифференциальных уравнений движения системы тел
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ ПО ДИНАМИКЕ
Исследование колебаний механической системы с одной степенью свободы
Эти задачи следующие:
2. Построение расчетной схемы .
Ф ормулировка задачи — это условие ( текст) з адачи. Она осу ществляется руководител ем работ сов местно с испол нителе м.
Рас четная схема — эт о рисунок , на ко тор ом изображены :
а) ра циональ но выбранная система координат;
Математическая моде ль — э то система д иф фере нциальных уравн ений, алгебраических уравнений и на чальн ых условий, описывающих динамическое поведение механической системы.
Дано: m1, m2, m3 — массы тел механической системы, с — жесткость упру гого элемента, r 1 — радиус одн ородн ого катка 1, r2, R2 — радиусы ст упеней блока 2, i2 — рад иус инерции блока 2 ,  — коэффициент с опротив ления среды,
— коэффициент с опротив ления среды,  — угол наклона плос кост и, по которой катится каток 1.
— угол наклона плос кост и, по которой катится каток 1.
Определить: применяя основные теоремы динамики системы и аналитические методы теоретической механики, определить закон движения первого тела и реакции внешних и внутренних связей. Провести численный анализ полученного решения с использованием ЭВМ.
Порядок выполнения работы:
3) Сформулировать начальные услови я движения.
4) Найти решение дифференциального уравнения движения.
6) По дставив на йденные постоянны е интегрирования в решение дифференциального уравнения, записать закон движ ен ия объ ект а .
8) Построить алгоритм вычис лени й для реализации н а ЭВМ.
9) Произ вес ти вычисления в дисплейном классе.
10) Произв ес ти графическую обработк у результатов вычис лений.
1. Применение основных теорем динамики механической системы
1.1. Постановка второй основной задачи динамики механической системы
Расчетная схема представлена на рис.2
 — силы тяжести,
— силы тяжести,
 — нормальная реакция опорной плоск ости,
— нормальная реакция опорной плоск ости,
 — си ла сцепления ,
— си ла сцепления ,
 — упругая реакция пружины,
— упругая реакция пружины,
 — реакции подшипника блока 2,
— реакции подшипника блока 2,
 — сила вязкого сопротивления,
— сила вязкого сопротивления,
 — возмущающая си ла.
— возмущающая си ла.
Рассматриваемая механическая система имеет одну степень свободы (нити нерастяжимые, качение катка 1 происходит без скольжения). Будем определять ее положение с помощью координаты S. Начало отсчета координаты совместим с положением статического равновесия центра масс груза 3.
Для пост роения дифферен циального уравнения движен ия с истемы используем теорему об изменении к инетической энергии механической системы в форме:
 , (1.1)
, (1.1)
где Т — кинетическая энергия системы,
 — сумма мощностей внеш ни х сил,
— сумма мощностей внеш ни х сил,
 — сумма мощнос тей внутренних сил.
— сумма мощнос тей внутренних сил.
Теорема (1.1) формулируется так: «Производная по времени от кинетической энергии механической системы равн а алгебраической сумме мощностей внеш них и внутренних сил, д ейс твующих на точки механической системы».
Вычислим ки нетическую энергию сис темы как сумму кинетических эн ергий тел 1-3:
 . (1.2)
. (1.2)
Каток 1 совершает плоскопараллельное движение, поэто му его кинетическая энергия опре деляется по теореме Кенига:
где VC1 – скорость центра масс катка;
JC1 – момент инерции относительно центральной оси катка;
 – угловая скорость катка.
– угловая скорость катка.
Блок 2 совершает вращ ательное движение около неподвижной оси. Его кинетическая энергия
 , (1.4)
, (1.4)
где JC2 – момент инерции относительно центральной оси блока;
 – угловая скорость блока.
– угловая скорость блока.
Груз 3 совершает поступательное движение. Его кинетическая энергия равна:
 . (1.5)
. (1.5)
Кинетическая энергия всего механизма будет равна:
 . (1.6)
. (1.6)
Выразим VC1, и через скорость груза 3. Положив V3 = V, получим
 (1.7)
(1.7)
Подставляя (1.3), (1.4), (1.5) в (1.6) с учетом (1.7), получаем:
 (1.8)
(1.8)
 , (1.9)
, (1.9)
 . (1.10)
. (1.10)
Величину  будем называть приведенной массой.
будем называть приведенной массой.
Найдем производную от кинетической энергии по времени
 . (1.11)
. (1.11)
Теперь вычислим правую часть уравнения (1.1) — сумму мощностей внешних и внутренних сил.
 . (1.12)
. (1.12)
Рассматриваемая нами механическая система является неизменяемой, т.е. тела, входящие в систему, недеформируемы и скорости их точек относительно друг друга равны нулю. Поэтому сумма мощностей всех внутренних сил будет равняться нулю:
 . (1.13)
. (1.13)
Будут равняться нулю и мощности некоторых внешних сил, приложенных в точках, скорости которых равны нулю. Как видно из расчетной схемы, таковыми являются силы
 .
.
 ; (1.14)
; (1.14)
или, раскрывая скалярные произведения,
 . (1.15)
. (1.15)
С учетом кинематических соотношений (1.7) сумму мощностей внешних сил преобразуем к виду:
 (1.16)
(1.16)
 , (1.17)
, (1.17)
 . (1.18)
. (1.18)
Величину F пр будем называть приведенной силой.
Преобразуем выражение (1.18). Упругую силу считаем пропорциональной удлинению пружины. Полное удлинение пружины f равно сумме статического f ст и динамического SC1 удлинений
 ,
,
причем из выражения (1.7) для VС1 следует, что  .
.
Тогда упругая сила будет равна:
 . (1.19)
. (1.19)
Сила вязкого сопротивления  . Приведенную силу с учетом последних формул для F уп и R запишем в виде:
. Приведенную силу с учетом последних формул для F уп и R запишем в виде:
 . (1.20)
. (1.20)
В состоянии покоя приведенная сила равна нулю. Полагая в (1.20)  и
и  , получаем условие равновесия системы
, получаем условие равновесия системы
 . (1.21)
. (1.21)
Из уравнения (1.21) определяется статическое удлинение пружины
 . (1.22)
. (1.22)
Учитывая (1.22) в (1.20), получаем окончательное выражение для приведенной силы:
 . (1.23)
. (1.23)
Подставим выражения для производной от кинетической энергии (1.11) и сумму мощностей всех сил (1.17) с учетом (1.23) в уравнение (1.1). Тогда, получаем дифференциальное уравнение движения системы:
 . (1.24)
. (1.24)
Запишем последнее уравнение в виде:
 , (1.25)
, (1.25)
где введены коэффициенты, имеющие определенный физический смысл:
 — циклическая частота свободных колебаний,
— циклическая частота свободных колебаний,
 — показатель степени затухания колебаний.
— показатель степени затухания колебаний.
Запишем начальные условия движения:
 . (1.26)
. (1.26)
В ыражения (1.25) и (1.26) совместно представляют математическую модель для решения второй задачи динамики.
1.2. Определение закона движения системы.
Проинтегрируем дифференциальное уравнение (1.25). Пусть возмущающая сила изменяется по гармоническому закону:
где  — амплитуда возмущающей силы,
— амплитуда возмущающей силы,
р — циклическая частота возмущения.
Общее решение S неоднородного дифференциального уравнения (1.25) складывается из общего решения однородного уравнения  и частного решения
и частного решения  неоднородного:
неоднородного:  . Однородное дифференциальное уравнение, соответствующее данному неоднородному (1.25), имеет вид:
. Однородное дифференциальное уравнение, соответствующее данному неоднородному (1.25), имеет вид:
 . (2.2)
. (2.2)
Решение этого уравнения ищем в виде функции
 , (2.3)
, (2.3)
где А и  — неопределенные постоянные величины.
— неопределенные постоянные величины.
Подставляя (2.3) в (2.2), получаем:
Так как мы ищем нетривиальное решение, то  . Следовательно, должно выполняться условие
. Следовательно, должно выполняться условие
 . (2.4)
. (2.4)
Уравнение (2.4) называется характеристическим уравнением дифференциального уравнения (2.2). Это уравнение имеет два корня:
 . (2.5)
. (2.5)
В зависимости от знака подкоренного выражения, корни характеристического уравнения могут быть комплексно-сопряженными или действительными. Возможны три случая:
 — подкоренное выражение отрицательное, следовательно корни комплексно-сопряженные,
— подкоренное выражение отрицательное, следовательно корни комплексно-сопряженные,
 — подкоренное выражение равно нулю, корни действительные, кратные.
— подкоренное выражение равно нулю, корни действительные, кратные.
 — подкоренное выражение больше нуля, корни действительные, разные.
— подкоренное выражение больше нуля, корни действительные, разные.
В первом случае ( ) общее решение уравнения (2.2) имеет вид:
 , (2.6)
, (2.6)
где А 1 , А2 – постоянные интегрирования,
 ,
,
 ,
,
нетрудно представить в виде:
где a ,  — постоянные интегрирования.
— постоянные интегрирования.
Во втором случае ( ) общее решение имеет вид:
В третьем случае ( ) общее решение имеет вид:
 .
.
Далее предполагается, что в рассматриваемом примере имеет место случай  .
.
 . (2.11)
. (2.11)
Частное решение ищем в виде правой части
 . (2.12)
. (2.12)

Сравнивая коэффициенты при соответствующих тригонометрических функциях справа и слева, получаем систему алгебраических уравнений для определения постоянных А и В:
 ,
,
 .
.
Решая эту систему, получаем следующие выражения для коэффициентов А и В:
 ;
;
 . (2.13)
. (2.13)
Таким образом, решение (2.12) определено. Складывая (2.8) и (2.12), получаем общее решение неоднородного уравнения (2.11)
Константы а и определяются из начальных условий (1.26). Для этого найдем производную по времени от (2.14)
Подчинив (2.14) и (2.15) начальным условиям, получим систему уравнений относительно искомых констант
 ,
,
 .
.
Решая эту систему, получаем:
 ,
,
 . (2.16)
. (2.16)
Подставляя (2.16) в (2.14), получаем закон движения механизма.
1.3. Определение реакций внешних и внутренних связей.
Для решения этой задачи расчленяем механизм на отдельные части и изображаем расчетные схемы отдельно для каждого тела (рис.3).
Определение реакций связей проведем с помощью теоремы об изменении количества движения
 , (3.1)
, (3.1)
и теоремы об изменении кинетического момента относительно центра масс
 . (3.2)
. (3.2)
В соответствии с расчетными схемами (рис. 3) записываем уравнения (3.1) и (З.2) в проекциях на оси координат
 , (3.3)
, (3.3)
 , (3.4)
, (3.4)
 ; (3.5)
; (3.5)
 , (3.6)
, (3.6)
 , (3.7)
, (3.7)
 ; (3.8)
; (3.8)
 . (3.9)
. (3.9)
С учетом кинематических соотношений (1.7) систему уравнений (3.3) -(3.9) преобразуем к виду:
 ,
,
,
 , (3.10)
, (3.10)
,
,
 ,
,
 .
.
Уравнения (3.10) составляют систему алгебраических уравнений относительно функций
 , N 1, F сц , T 12, T 23, X 2, Y 2.
, N 1, F сц , T 12, T 23, X 2, Y 2.
Решая эту систему, получаем и дифференциальное уравнение движения системы, и выражения для определения реакций.
2.1. Составлени е дифференциального уравнения движения механизма с помощью принципа Даламбера-Лагранжа.
 . (4.1)
. (4.1)
Здесь  — сумма элементарных работ всех активных сил на возможном перемещении системы;
— сумма элементарных работ всех активных сил на возможном перемещении системы;
 — сумма элементарных работ всех сил инерции на возможном перемещении системы.
— сумма элементарных работ всех сил инерции на возможном перемещении системы.
Изобразим на рисунке активные силы и силы инерции (рис.4). Реакции идеальных связей  не учитывают и не отображают на расчетной схеме, поскольку по определению работа их реакций на любом возможном перемещении системы равна нулю. Пружина является неидеальной связью. Введем реакцию этой связи в число активных сил.
не учитывают и не отображают на расчетной схеме, поскольку по определению работа их реакций на любом возможном перемещении системы равна нулю. Пружина является неидеальной связью. Введем реакцию этой связи в число активных сил.
Сообщим системе возможное перемещение. Возможная работа активных сил определяется как сумма следующих элементарных работ:
 . (4.2)
. (4.2)
Вычисляя последовательно элементарные работы активных сил и суммируя их, получаем после несложных преобразований
 . (4.3)
. (4.3)
Аналогичное выражение для приведенной силы F пр получено ранее [см. (1.23)].
Найдем возможную работу сил инерции:
 . (4.4)
. (4.4)
Для величин главных векторов и главных моментов сил инерции имеем следующие выражения:
 ;
;  ;
;
 ;
;  . (4.5)
. (4.5)
Используя кинематические соотношения (1.7), можно записать
 ;
;  ;
;
 ;
;  ; (4.6)
; (4.6)
 ;
;  .
.
Тогда возможную работу сил инерции можно преобразовать к виду
 (4.7)
(4.7)
 , (4.8)
, (4.8)
 . (4.9)
. (4.9)
Аналогичное выражение для приведенной массы системы было получено ранее [см.(1.10)]. Подставляя выражения (4.3) и (4.8) в общее уравнение динамики (4.1), получаем
 . (4.10)
. (4.10)
Поделив (4.10) на  , получим дифференциальное уравнение вынужденных колебаний системы:
, получим дифференциальное уравнение вынужденных колебаний системы:
 , (4.11)
, (4.11)
 ;
;
 . (4.12)
. (4.12)
Дифференциальное уравнение (4.11) полностью совпадает с полученным ранее уравнением (1.25).
2.2. Составление дифференциального уравнения движения механизма с помощью уравнений Лагранжа 2— го рода.
Составим теперь уравнения Лагранжа 2-го рода. Для механической системы с одной степенью свободы дифференциальное уравнение движения в обобщенных координатах имеет вид:
 , (4.13)
, (4.13)
 — обобщенная скорость.
— обобщенная скорость.
Выражение для кинетической энергии системы было найдено ранее (1.8):
 ,
,
 .
.
Учитывая, что  , получаем
, получаем
 . (4.14)
. (4.14)
Производные от кинетической энергии
 ;
;  ;
;  . (4.15)
. (4.15)
Для определения обобщенной силы Q сообщим системе возможное перемещение  (рис. 4) и вычислим сумму элементарных работ всех активных сил на возможных перемещениях точек их приложения [см. (4.3)]:
(рис. 4) и вычислим сумму элементарных работ всех активных сил на возможных перемещениях точек их приложения [см. (4.3)]:
 .
.
С другой стороны для системы с одной степенью свободы
 . (4.16)
. (4.16)
Сравнивая два последних соотношения, получаем
Подставляя производные от кинетической энергии (4.15) и обобщенную силу (4.16) в уравнение Лагранжа, получаем
 . (4.18)
. (4.18)
Полученное уравнение (4.18) совпадает с уравнениями (1.25) и (4.11).
3. Анализ колебаний механической системы с одной степенью свободы
3.1. Колебания механической системы при отсутствии сил сопротивления среды
В дифференциальном уравнении движения системы, полученном ранее (1.25), полагаем  , тогда уравнение движения примет вид:
, тогда уравнение движения примет вид:
 (5.1)
(5.1)
Начальные условия: при  заданы
заданы  и
и  .
.
3.1.1. Свободные колебания
Если внешнее возмущение отсутствует (т.е.  ), то дифференциальное уравнение движения становится однородным:
), то дифференциальное уравнение движения становится однородным:
 (5.2)
(5.2)
и называется дифференциальным уравнением свободных колебаний, т.е. таких движений системы, которые происходят под действием так называемых восстанавливающих сил. Восстанавливающие силы – это такие силы, каждая из которых стремится вернуть систему в состояние статического равновесия (силы тяжести, упругие силы).
Решение уравнения (5.2) с учетом начальных условий имеет вид:
 (5.3)
(5.3)
где  ;
;  ;
;  . (5.4)
. (5.4)
Анализируя решение (5.3) можно сделать следующие выводы:
1. Свободные колебания (рис.5.1) системы с одной степенью свободы представляют собой гармонические колебания.
2. Амплитуда  (максимальное отклонение системы от состояния равновесия) и начальная фаза
(максимальное отклонение системы от состояния равновесия) и начальная фаза  зависят от начальных условий.
зависят от начальных условий.
3. Циклическая частота и соответственно период колебаний  от начальных условий не зависят, а зависят только от жесткой
от начальных условий не зависят, а зависят только от жесткой  и инерционной
и инерционной  характеристик системы.
характеристик системы.
4. Отношения амплитуд колебаний различных точек системы не зависят от начальных условий, так как начальные условия влияют на амплитуды только через множитель  , общий для всех точек.
, общий для всех точек.
5. Все точки системы всегда находятся в одной фазе, т.е. они одновременно проходят через свои равновесные положения; координаты всех точек одновременно достигают своих максимальных значений.
3.1.2. Вынужденные колебания
При воздействии возмущающей силы  решение неоднородного дифференциального уравнения (5.1) с учетом начальных условий представим в виде:
решение неоднородного дифференциального уравнения (5.1) с учетом начальных условий представим в виде:
 (5.5)
(5.5)
где  .
.
Первые два слагаемых правой части уравнения (5.5):
 (5.6)
(5.6)
соответствуют свободным колебаниям с частотой  (рис.5.1), т.е. колебаниям, которые совершал бы осциллятор при отсутствии возмущений. При нулевых начальных условиях, т.е. когда
(рис.5.1), т.е. колебаниям, которые совершал бы осциллятор при отсутствии возмущений. При нулевых начальных условиях, т.е. когда  , такие колебания во все время действия возмущающей силы не возникают.
, такие колебания во все время действия возмущающей силы не возникают.
Третье слагаемое в (5.5)
 (5.7)
(5.7)
— гармоническое колебание, происходящее с собственной частотой системы, но с амплитудой, зависящей от амплитуды возмущающей силы
 (5.8)
(5.8)
Эти колебания также относятся к свободным колебаниям. Они всегда сопровождают вынужденные колебания при любых начальных условиях, от которых они вообще не зависят.
Их называют сопровождающими колебаниями (рис. 5.2).
Четвертое слагаемое в выражении (4.5):
 (5.9)
(5.9)
представляет собой вынужденные колебания системы (рис. 5.3).
Таким образом, колебания линейного осциллятора в рассмотренном случае представляют собой линейное наложение трех гармонических колебаний: свободных, сопровождающих и вынужденных (рис. 5.4).
Отметим следующие свойства вынужденных колебаний:
1. Вынужденные колебания происходят с частотой возмущающей силы.
2. Вынужденные колебания не зависят от начальных условий, поэтому для изменения, например, амплитуды (при заданной возмущающей силе) вынужденных колебаний необходимы существенные изменения параметров конструкции: ее жесткости, распределения масс, тогда как в свободных колебаниях для этого достаточно изменить начальные условия.
3. Если  , то знак отклонения
, то знак отклонения  будет совпадать со знаком возмущающей силы
будет совпадать со знаком возмущающей силы  , т.е. сила и вызванн ые ею вынужденные колебания будут находиться в одной фазе.
, т.е. сила и вызванн ые ею вынужденные колебания будут находиться в одной фазе.
Если  , то знак отклонения будет противоположен знаку силы.
, то знак отклонения будет противоположен знаку силы.
Переписав для этого случая выражение (5.9) в виде:
 , (5.10)
, (5.10)
убеждаемся, что при возмущающая сила и вызванные ею колебания находятся в противоположенных фазах.
4. Если  , то выражения (5.7) и (5.9) теряют смысл. Для анализа колебаний в этой ситуации эти выражения рассматриваются совместно
, то выражения (5.7) и (5.9) теряют смысл. Для анализа колебаний в этой ситуации эти выражения рассматриваются совместно
 (5.11)
(5.11)
т.е. получим неопределенность, которую можно раскрыть по правилу Лопиталя , заменив дробь в (5.11) пределом
 .
.
Таким образом, в этом случае общий интеграл (5.5) будет иметь вид:
 . (5.12)
. (5.12)
И здесь, как в (5.5) движение осциллятора представляет собой линейное наложение трех колебательных движений, но с одним существенным отличием от (5.5): вынужденные колебания представлены непериодическим слагаемым:
 , (5.13)
, (5.13)
в коэффициенты которого входит время t .
С течением времени он растет по абсолютной величине безгранично, причем вынужденные колебания происходят с возрастающей по линейному закону амплитудой.
Такая ситуация при колебаниях называется резонансом.
5. Если частота вынужденных колебаний не равна частоте свободных колебаний, но близка к ней, то, записав выражение (5.11) в виде:
 , (5.14)
, (5.14)
полагаем  , но
, но  ,
,  ,
,  и преобразовываем (5.14) к виду:
и преобразовываем (5.14) к виду:
 . (5.15)
. (5.15)
Используя тригонометрическое выражение:
 ,
,
 , (5.16)
, (5.16)
т.е.  ,
,
где  — есть амплитуда колебаний, являющаяся периодичной функцией времени и меняется весьма медленно с большим периодом
— есть амплитуда колебаний, являющаяся периодичной функцией времени и меняется весьма медленно с большим периодом  , чем период самих колебаний
, чем период самих колебаний  , т.е.
, т.е.  , и малой частотой
, и малой частотой  .
.
Подобная рассмотренному случаю ситуация представляет собой биение (рис. 5.5).
Таким образом, когда частота вынужденных колебаний весьма близка к частоте свободных (или собственных) колебаний системы, но не равна ей, в колебательной системе возникает биение.
3.2. Колебания механической системы в вязкой среде
Дифференциальное уравнение движения имеет вид (1.25):
 . (5.17)
. (5.17)
Начальные условия:  . (5.18)
. (5.18)
3.2.1. Свободные колебания
Полагая в (5.17)  , т.е. возмущения отсутствуют, получим
, т.е. возмущения отсутствуют, получим
 (5.19)
(5.19)
Ограничимся случаем малых сопротивлений и примем  .
.
Тогда общее решение однородного уравнения (5.19) с учетом начальных условий можно представить в виде (рис. 5.6):
 , (5.20)
, (5.20)
где  . (5.21)
. (5.21)
 . (5.22)
. (5.22)
Из закона движения системы (5.20) видно, что в сопротивляющейся среде:
1) свободные колебания являются затухающими;
2) частота затухающих колебаний  меньше частоты незатухающих колебаний
меньше частоты незатухающих колебаний  ;
;
3) амплитуда затухающих колебаний  убывает по экспоненциальному закону;
убывает по экспоненциальному закону;
4) период затухающих колебаний  больше периода незатухающих колебаний
больше периода незатухающих колебаний  ;
;
5) отношение любых двух соседних амплитуд:  и
и  есть величина постоянная
есть величина постоянная
 . (5.23)
. (5.23)
Это отношение называется декрементом затухания. Логарифм этого коэффициента
 (5.24)
(5.24)
называется логарифмическим декрементом.
Декремент или логарифмический декремент используются для оценки быстроты убывания амплитуды затухающих колебаний.
3.2.2. Вынужденные колебания в сопротивляющейся среде
Дифференциальное уравнение движения в этом случае является неоднородным:
, (5.25)
его общее решение имеет вид:
 . (5.26)
. (5.26)
При начальных условиях  постоянные интегрирования будут такими
постоянные интегрирования будут такими
 (5.27)
(5.27)
После подстановки постоянных интегрирования (5.27) в общее решение (5.26) получим закон движения механической системы:
 (5.28)
(5.28)
 ; (5.29)
; (5.29)
 ;
;
 (5.30)
(5.30)
 — коэффициент динамичности. (5.31)
— коэффициент динамичности. (5.31)
В выражении (5.28) первое слагаемое представляет собой собственные затухающие колебания (рис. 5.6):
 .
.
Второе и третье слагаемые в совокупности представляют собой сопровождающие колебания (рис. 5.7):
 . (5.32)
. (5.32)
 (5.33)
(5.33)
— вынужденные колебания с частотой возмущающей силы (рис. 5.8).
Таким образом, амплитуда вынужденных колебаний при резонансе достигает значительной величины при малых сопротивлениях.
 . (5.34)
. (5.34)
Если , но близка к ней, то, положив  , выражение (5.32) для сопровождающих колебаний представится в виде:
, выражение (5.32) для сопровождающих колебаний представится в виде:
 . (5.35)
. (5.35)
Рассматривая (5.33) и (5.35) совместно и, добавив выражение
 ,
,
равное нулю, получим закон движения механической системы в виде:
 (5.36)
(5.36)
Но выражение в квадратных скобках можно представить так (5.15):
 . (5.37)
. (5.37)
Тогда получим, положив  ,
,
 (5.38)
(5.38)
Последнее слагаемое в (5.38) представляет собой колебания биений с затухающей амплитудой
 ,
,
т.е.  . (5.39)
. (5.39)
Второе слагаемое в (5.38) – это незатухающие вынужденные колебания
 . (5.40)
. (5.40)
Первое слагаемое в (5.38) – это затухающие сопровождающие колебания
 . (5.41)
. (5.41)
Таким образом, в реальных условиях  колебания биений, вызываемые возмущенной силой с частотой, близкой к частоте затухающих колебаний, могут иметь практическое значение только в начале движения, в так называемый переходный период, и при малом значении коэффициента затухания n . При установившемся движении, которое наступает тем быстрее, чем больше сопротивление, движение системы определяется уравнением :
колебания биений, вызываемые возмущенной силой с частотой, близкой к частоте затухающих колебаний, могут иметь практическое значение только в начале движения, в так называемый переходный период, и при малом значении коэффициента затухания n . При установившемся движении, которое наступает тем быстрее, чем больше сопротивление, движение системы определяется уравнением :
.
3.3. Коэффициент динамичности
Как было отмечено выше (5.31), коэффициентом динамичности называется отношение максимального динамического отклонения механической системы от положения устойчивого равновесия к статическому отклонению под воздействием силы, равной амплитуде возмущающей силы (рис. 5.10).
 , (5.42)
, (5.42)
где  ,
,
т.е. согласно выражению (5.31):
 . (5.43)
. (5.43)
Максимальное значение  , следовательно, и амплитуды вынужденных колебаний D , достигается при минимальном значении подкоренного выражения (5.43):
, следовательно, и амплитуды вынужденных колебаний D , достигается при минимальном значении подкоренного выражения (5.43):
 . (5.44)
. (5.44)
Найдем, при каком значении р функция (5.44) минимальная.
 . (5.45)
. (5.45)
Из (5.45) следует, что
 . (5.46)
. (5.46)
Это возможно, если
 (5.47)
(5.47)
Подставляя (5.46) в (5.43), получаем
 . (5.48)
. (5.48)
При малом значении сопротивления  :
:
 . (5.49)
. (5.49)
При резонансе  :
:
 ,
,
т.е. максимальное значение амплитуды и ее значение при резонансе весьма близки друг к другу (практически одинаковы).
В области, достаточно удаленной от резонанса, при установившемся движении и малом коэффициенте затухания, силами сопротивления можно пренебрегать.
Графические иллюстрации видов колебаний
Рис. 5.1. Собственные колебания 
Рис.5.2 Сопровождающие колебания 
Рис.5.3 Вынужденные колебания 
Рис. 5.4 Результирующие колебания
Рис. 5.5 Биения – результирующие колебания 
Колебания в вязкой среде
Рис.5.6. Собственные колебания в вязкой среде 
Рис.5.7 Сопровождающие колебания в вязкой среде
Рис. 5.8. Вынужденные колебания
Рис. 5.9 Результирующие колебания в вязкой среде
Рис. 5.10 Коэффициент динамичности 
Рис. 5.11. Резонанс (  ) при нулевых значениях начальных перемещения и скорости
) при нулевых значениях начальных перемещения и скорости
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Дифференциальные уравнения движения системы материальных точек



Дифференциальные уравнения движения системы материальных точек
- Дифференциальные уравнения движения системы масс В настоящей главе классификация внутренних (Р) и внешних (Fe) сил силы pa используется при рассмотрении системы массовых точек, в отличие от механики статики и массовых точек твердого тела, в которой сила делится на заранее заданные силы и силы реакции
сцепления. Внутренние силы — это силы взаимодействия между ключевыми точками, составляющими рассматриваемую систему. In кроме того, внутренние силы системы главный вектор V ’и главный момент m [равны пуле. V; = = = » — И)) = 0- И=> к \ •= » я Следует отметить, что в общих чертах система
Согласно принципу равенства действия и противодействия, внутренние силы существуют в pairs. Людмила Фирмаль
внутренних сил не сбалансирована, так как, несмотря на то, что эти условия выполняются, внутренние силы прикладываются к различным материальным точкам. Внешние силы-это те, которые применяются к критическим точкам рассматриваемой системы, от точек и тел, которые не являются частью этой и системы. Внешняя сила могов попадает в категорию внутренних сил, и наоборот. При
изменении конфигурации системы внутренние силы попадают в категорию внешних forces. So, учитывая систему, состоящую из 2 контактирующих шаров, давление первого шара nopofl и 2-го шара hierii является внутренней силой. Если рассматривать систему, состоящую из 1 первого шара, то давление 2-го шара относительно
- первого шара является внешней силой. уравнение динамики точки I-fi имеет важное значение]) в системе А = Н-1-Фе Где Feb-равнодействующая всех внешних сил, а Fj-равнодействующая всех внутренних сил, приложенных к материальной точке K-W. Ниже мы рассмотрим как систему, состоящую из конечного числа точек масс, так и систему тел с непрерывным распределением масс. Все теоремы сформулированы для системы важных точек, но система тел
может быть распределена без проблем. Дифференциальное уравнение k-ti движения точек масс в проекции на Декартовы координатные оси имеет вид: = Система из 3 уравнений. «Ля+=» В Дифференциальные уравнения движения системы из n материальных точек в проекции на ось декартовых координат описываются в виде: tpk = ’ F / tvi система 3 / / уравнение、 Где k = 1, 2, 3,…н. Поэтому для определения движения системы из n важных точек, составляющих систему, необходимо решить систему
чтобы найти постоянную, нужно дать Интеграл начальных условий движения. Людмила Фирмаль
обыкновенных 2-D уравнений 1N, которая содержит 3n неизвестных функций 3n независимой переменной t. 6 / /Имейте в виду, что внешние и внутренние силы могут зависеть как от времени, так и от расположения, скорости и ускорения точек в системе.
Решение такой задачи является сложным и трудоемким. Некоторые задачи динамики системы масс и массовых точек могут значительно упростить решение, применив так называемую общую теорему динамики.



Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
http://www.teoretmeh.ru/primerdinamika2.htm
http://lfirmal.com/differencialnye-uravneniya-dvizheniya-sistemy-materialnyh-tochek/