ЛЕКЦИЯ 3 ТЕМА: УРАВНЕНИЯ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА КАК ТВЕРДОГО ТЕЛА. ПРОДОЛЬНОЕ И БОКОВОЕ ДВИЖЕНИЕ
- Евгений Перхуров 5 лет назад Просмотров:
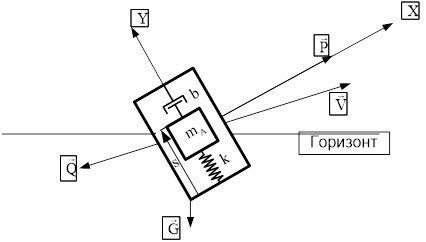
1 1 Направления подготовки: Авионика Аэронавигация Системная инженерия Бортовые системы управления Дисциплина: Курс, семестр, уч. год: 3, весенний, 11/1 Кафедра: 31 СУЛА Руководитель обучения: ассистент Копысов Олег Эдуардович ЛЕКЦИЯ 3 ТЕМА: УРАВНЕНИЯ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА КАК ТВЕРДОГО ТЕЛА. ПРОДОЛЬНОЕ И БОКОВОЕ ДВИЖЕНИЕ Движение ЛА, как твѐрдого тела в связанной системе координат описывается уравнениями Эйлера (шесть нелинейных дифференциальных уравнений второго порядка). Силы и моменты, входящие в эти уравнения, сложным образом зависят от высоты, скорости и режима полѐта и меняются во времени, г. к. изменяются условия полѐта, например из-за изменения массы и момента инерции ЛА в результате расхода топлива или сброса груза. При аналитическом исследовании процессов управления ЛА его уравнения движения, как правило, упрощают, рассматривая два независимые друг от друга движения: продольное и боковое. К продольному относят поступательные движения ЛА вдоль осей ОХ и ОY и вращательное движение вокруг оси O. К боковому движению относят поступательное вдоль оси O и вращательные движения вокруг осей ОХ и ОY. Продольное движение. Обобщенная математическая модель При продольном движении ЛА вектор V линейной скорости его центра масс находится в вертикальной плоскости. Внешние силы, действующие на ЛА: Р сила тяги двигателей, вектор которой направлен вдоль оси ОХ: Х а сила лобового сопротивления, вектор которой направлен против вектора V, т.е. в отрицательную сторону оси ОХ а Y а подъѐмная сила, вектор которой перпендикулярен вектору V mg вес ЛА (m масса ЛА, g ускорение свободного падения). Вращение ЛА в плоскости
2 Х а Y а возможно под действием момента М, действующего вокруг оси O а, который называется аэродинамическим моментом тангажа. В соответствии с рис. 3.1 имеют место кинематические соотношения:, (3.1) где ϑ угол тангажа θ угол наклона траектории движения центра масс (ЦМ) ЛА ω угловая скорость тангажа. Рисунок 3.1 Внешние силы, действующие на ЛА в продольном движении Вращательное движение ЛА вокруг оси O а описывается уравнением: I, (3.) где I момент инерции ЛА относительно оси O а М момент аэродинамических сил, который можно представить в виде: mba S V, (3.3) где т коэффициент момента b а — хорда крыла ρ плотность воздуха S площадь крыльев. Коэффициент т можно представлять состоящим из суммы трех слагаемых, два из которых зависят от статических параметров (α, V, δ в ) и определяют статический момент, а третий от динамических параметров ( ), и определяет демпфирующий момент.
3 3 Спроектируем силы, действующие на ЛА, на касательную к траектории полѐта (ось X) и на нормаль к ней (ось Y). Сумма проекций сил на касательную к траектории: dv m mv P cos X a mg sin. dt (3.4) При определении проекций сил на нормаль к траектории нужно иметь в виду, что при движении ЛА по искривленной траектории с радиусом кривизны r, на него действует центробежная сила инерции mv траектории), a ds = Vdt, то / mv mv mv d r. Так как r = ds/dθ (s длина дуги mv mv. r ds / d Vdt / d dt Следовательно, сумма проекций сил на нормаль к траектории: mv Y Psin mg cos. a (3.5) Сила тяги Р зависит от параметров двигателя, от внешних условий, характеризуемых скоростью полѐта V, высотой полѐта Н и параметра управления двигателем δ р, т. е. в общем виде Р = Р(V, Н, δ р ). Аэродинамические силы Х а и Y а зависят от угла атаки α, скорости полѐта V, плотности воздуха ρ и угла отклонения руля высоты δ в. Так как угол δ в практически не влияет на величины Х а и Y а, то этим влиянием пренебрегают и представляют их обычно в виде: где X a CxaS V Ya CyaS V, (3.6) C xa, C ya коэффициенты лобового сопротивления и подъемной силы, зависящие от угла атаки и скорости полета. Система нелинейных дифференциальных уравнений (3.), (3.4), (3.5) с учѐтом (3.1), (3.3), (3.6) является математической моделью продольного движения ЛА. Известно, что для пилотируемых ЛА самолетной схемы практически для всех компоновок и большинства режимов полета, собственное движение ЛА состоит из двух колебательных движений, отличающихся частотой и степенью затухания. Эти движения называются короткопериодическими и длиннопериодическими или фуго-
4 идными. Причиной возникновения короткопериодических движений является нарушение равновесия моментов вокруг оси O a, что приводит к вращению ЛА относительно ЦМ и изменению углов α и ϑ. Скорость невозмущѐнного линейного движения при этом практически не изменяется. Причиной возникновения длиннопериодических движений является нарушение внешних сил, действующих в продольной плоскости симметрии ЛА, следствием чего является изменение скорости его полета. 4 Линеаризованные уравнения продольного движения ЛА Применяя к уравнениям (3.), (3.4), (3.5) метод малых возмущений, могут быть получены линейные уравнения продольного движения ЛА. Предположим, что на исследуемом участке полета невозмущенное движение ЛА характеризуется постоянными силами X, Y, P, и параметрами V, α, ϑ, θ, H и ω z =, а параметры управления δ В, δ р также постоянны. Если исследуется участок полета, на котором параметры движения существенно меняются, его разбивают на несколько участков, на которых параметра движения можно считать постоянными. Уравнения невозмущѐнного движения ЛА на участке с постоянными параметрами следуют из уравнений (3.), (3.4), (3.5): P cos X mg sin Y P sin mg cos. Из первых двух уравнений системы следует отношение: P cos X tg, P sin Y (3.7) из которого можно заключить, что при P cos X ЛА летит горизонтально, при P cos X набирает высоту ( ), а при P cos X уменьшает высоту ( ).
5 Если в некоторый момент времени параметры движения и управления изменились на величины V. то соответствующие параметры P возмущѐнного движения принимают вид: V V V P P P. При изучении продольного углового движения ЛА в области малых изменений параметров движения первое уравнение системы (3.7) из рассмотрения можно исключить, т.к. оно представляет сумму проекций сил на ось ОХ a (рис. 3.1), не влияющих на угловое движение ЛА. При линеаризации второго уравнения системы (3.7) полагают, что проекция силы тяжести на ось OY a не оказывает влияния на угловое движение ЛА, и этой составляющей можно пренебречь. В результате известных процедур линеаризации могут быть получены простейшие уравнения продольного движения ЛА: mv Y I (3.8), где постоянные коэффициенты соответствуют исходному невозмущѐнному движению и определяются следующим образом: Y Y ( Pcos ) ( ) ( ) ( ). 5
6 Рассмотрим аэродинамические моменты в уравнениях (3.8), определяющих короткопериодическое движение ЛА. При >, что обычно имеет место, момент называется моментом продольной статической устойчивости, который является следствием воздействия набегающего воздушного потока на хвостовое горизонтальное оперение, от размеров и формы которого главным образом и зависит. При невозмущѐнном движении ЛА угол атаки и аэродинамический момент относительно поперечной оси отсутствует. Восходящие или нисходящие потоки воздуха приводят к изменению угла атаки на величину например изменения центровки ЛА. Величина, который может измениться и из-за других причин, приводит к увеличению подъѐмной силы крыльев, следствием чего является изменение высоты полѐта ЛА, и к увеличению на Y подъѐмной силы горизонтального хвостового оперения, которая приложена в центре давления (ЦД) на плече L ГО, что и создаѐт момент Y L ГО, возвращающий ЛА к прежнему углу атаки, т.е. (рис. 3.). Таким образом, момент обеспечивает продольную устойчивость ЛА, если центр давления аэродинамических сил находится за центром масс ЛА в сторону хвостового оперения. Если ЦМ и ЦД совпадают, то 6 = (нейтральный ЛА), если ЦД находится впереди ЦМ, то 7 еѐ увеличение средствами аэродинамики приводит к увеличению воздействия на ЛА аэродинамических возмущений. 7 Рисунок 3. Определение момента продольной статической устойчивости Рисунок 3.3 Определение момента демпфирования тангажа Управляющий момент появляется при отклонении руля высоты хвостового горизонтального оперения, вследствие чего изменяется его угол атаки. Физическая картина воздействия этого момента на ЛА аналогична влиянию момента продольной статической устойчивости (статической устойчивости тангажа). На руль высоты, отклонѐнный от нейтрального положения на угол, действует аэродинамическая сила Y РВ, направленная перпендикулярно набегающему потоку воздуха и приложенная в ЦД рулевой поверхности (рис. 3.4), который, как правило, не совпадает с ее осью вращения (ОВ). Сила Y РВ относительно оси вращения создает так называемый шарнирный момент, который является основным нагрузочным моментом для привода, осуществляющего разворот руля высоты. В точке, соответствующей ОВ, можно приложить две противоположно направленных силы Y РВ, равных по модулю Y РВ.
8 8 Рисунок 3.4 Определение управляющего момента по высоте Тогда можно записать равенство, Y ‘ L Y ‘ l Y L из которого P P P P следует, что управляющий момент, приложенный к ЛА, состоит из суммы шарнирного момента, действующего относительно ОВ руля и момента силы Y РВ на плече L относительно ЦМ ЛА. Вернемся к уравнениям системы (3.8) и перепишем их в переменных приращений углов тангажа где и атаки : I mv ( ) Y F. Y (3.9), F Y возмущающие момент и сипа, действующие соответственно относительно оси O а и вдоль оси OY а. Уравнения системы (3.9) перепишем в виде: где a1 a a3 a a a a a 5 a F, 6 Y Y. a I I I 4 1, a 1 5, a6. I mv mv (3.1) (3.11) Постоянные коэффициенты в (3.11), соответствующие невозмущѐнному движению, определяются следующим образом:
9 m qsb m qsl m qsb Y c, yqs (3.1) где q V / скоростной напор b хорда крыла. 9 Боковое движение Аэродинамические силы и моменты, действующие на ЛА Боковое движение ЛА включает вращение вокруг продольной оси ОХ, нормальной оси ОY и линейное перемещение вдоль оси O. Рассмотрим основные аэродинамические силы и моменты, действующие на ЛА (рис. 3.5). Предположим, что вследствие какого-либо возмущения ЛА относительно нормальной системы координат ОХ g Y g g получил крен на угол γ, после чего возмущение исчезло. Угол γ определяет положение связанной системы координат ОХY, причѐм т. О совпадает с центром масс ЛА самолѐтной схемы. Плоскости крыльев относительно плоскости Х располагаются под углом φ. При положительном крене (на правое крыло) вдоль оси O появляется составляющая mg sin силы веса ЛА, под действием которой возникает скольжение ЛА со скоростью V VXtg ( V X продольная составляющая скорости V, β угол скольжения). Вследствие скольжения нарушается симметрия обтекания крыльев воздушным потоком. Для иллюстрации указанного обстоятельства на концах правого и левого крыльев построены треугольники воздушных скоростей ( V к составляющая скорости V набегающего воздушного потока вдоль крыльев V I — составляющая, перпендикулярная вектору скорости V ), из которых следует VI V tg. Так как скорости V 1 на правом и левом крыльях направлены в разные стороны, происходит изменение их углов атаки, что иллюстрируется построением треугольников скоростей на векторах скоростей V X и V I, из которых следует V / V. При этом на правом крыле имеет место положительное приращение I X угла атаки (+ ), а на другом отрицательное ( ).
10 1 Рисунок 3.5 Определение моментов статической устойчивости крена и пути Соответственно подъемная сила правого крыла увеличится на ΔY, а левого уменьшится на ΔY. В результате относительно оси ОХ образуется момент поперечной статической устойчивости или момент статической устойчивости крена, первопричиной которого является скольжение и который обозначается в виде, х М где ( х ) х. Очевидно, что этот момент тем больше, чем больше изменение угла, величина которого в соответствии с приведенными выше соотношениями, может быть представлена в виде: VI Vtg Vxtgtg, V V V x x x откуда следует, что чем больше угол φ, тем больше момент поперечной устойчивости. Стреловидность крыльев в плане также приводит к появлению момента поперечной устойчивости. Изменение углов атаки приводит к изменению сил лобового сопротивления на крыльях: на правом крыле эта сила увеличится на величину ΔХ, а на левом умень-
11 шится на ΔХ. С появлением угла β возникает также сила Δ на вертикальном оперении. Следствием указанных сил является возникновение флюгерного момента, или момента статической устойчивости пути, который старается развернуть ЛА в сторону набегающего воздушного потока. Этот момент обеспечивает устойчивость по углу скольжения, стремясь так развернуть ЛА, чтобы установился угол скольжения, имевший место до возмущения. Момент статической устойчивости пути обозначается в виде, где ( М y ) y y. 11 Используя литературные источники, найти графические зависимости коэффициента продольного момента от угла атаки и отклонения руля высоты, зависимость коэффициентов С ха, С уа от угла атаки. Термины для занесения в тезаурус: продольное движение, боковое движение, коэффициент лобового сопротивления, коэффициент подъемной силы, невозмущенное движение летательного аппарата, момент статической устойчивости, шарнирный момент.
Курсовая работа: Расчёт закона управления продольным движением самолета
| Название: Расчёт закона управления продольным движением самолета Раздел: Рефераты по транспорту Тип: курсовая работа Добавлен 16:15:05 05 декабря 2010 Похожие работы Просмотров: 129 Комментариев: 23 Оценило: 2 человек Средний балл: 5 Оценка: неизвестно Скачать |
 |
 ,
, ,
, – равнодействующая всех сил;
– равнодействующая всех сил; – главный момент внешних сил самолёта, вектор суммарного вращающего момента;
– главный момент внешних сил самолёта, вектор суммарного вращающего момента; – вектор угловой скорости системы координат;
– вектор угловой скорости системы координат; – момент количества движения самолёта;
– момент количества движения самолёта; » обозначает векторное произведение. Далее переходят к обычной скалярной записи уравнений, проектируя векторные уравнения на некоторую систему координатных осей.
» обозначает векторное произведение. Далее переходят к обычной скалярной записи уравнений, проектируя векторные уравнения на некоторую систему координатных осей.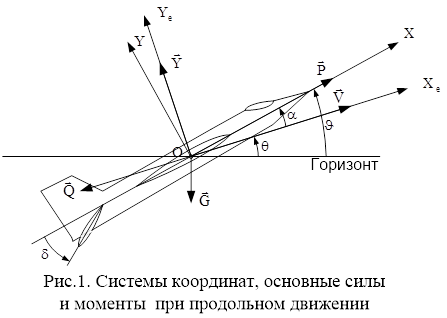
 – угол атаки,
– угол атаки,  – угол тангажа,
– угол тангажа,  – угол наклона траектории,
– угол наклона траектории,  – вектор воздушной скорости,
– вектор воздушной скорости,  – подъемная сила,
– подъемная сила,  – сила тяги двигателей,
– сила тяги двигателей,  – сила лобового сопротивления,
– сила лобового сопротивления,  – сила тяжести,
– сила тяжести,  – угол отклонения рулей высоты,
– угол отклонения рулей высоты,  – момент тангажа, вращающий самолёт вокруг оси ОZ.
– момент тангажа, вращающий самолёт вокруг оси ОZ. , (1)
, (1) – суммарный вектор внешних сил. Представим вектор скорости с использованием его модуля V и угла его поворота
– суммарный вектор внешних сил. Представим вектор скорости с использованием его модуля V и угла его поворота  .
. . (2)
. (2) ; (3)
; (3) . (4)
. (4) , (5)
, (5) , (6)
, (6) – (7)
– (7) . (8)
. (8) ; (9)
; (9) . (10)
. (10) есть функция скорости V и высоты H полёта, угла атаки
есть функция скорости V и высоты H полёта, угла атаки  , угловой скорости изменения угла тангажа (скорости вращения
, угловой скорости изменения угла тангажа (скорости вращения  самолёта вокруг связанной поперечной оси OZ) и угла отклонения руля высоты
самолёта вокруг связанной поперечной оси OZ) и угла отклонения руля высоты  :
: . (11)
. (11) – задаваемые табличным путём функции,
– задаваемые табличным путём функции, – плотность атмосферы,
– плотность атмосферы, (12)
(12) (13)
(13) ;
;  (14)
(14) и
и  являются чрезвычайно информативными с точки зрения оценки режима полёта и качества угловых процессов самолёта. Пренебрежём, как это часто делается для маневренных самолётов, слагаемым
являются чрезвычайно информативными с точки зрения оценки режима полёта и качества угловых процессов самолёта. Пренебрежём, как это часто делается для маневренных самолётов, слагаемым  в правой части уравнения (13). С учётом равенства (6) получим уравнение для производной приращения угла атаки:
в правой части уравнения (13). С учётом равенства (6) получим уравнение для производной приращения угла атаки: (15)
(15) (16)
(16) (17)
(17) и пренебрегая величиной
и пренебрегая величиной  , с учётом (14) для углов, измеряемых не в радианах, а в градусах, получим:
, с учётом (14) для углов, измеряемых не в радианах, а в градусах, получим: . (18)
. (18) м/с 2 .
м/с 2 . , получим формулу для приращения ускорения самолёта по оси подъёмной силы:
, получим формулу для приращения ускорения самолёта по оси подъёмной силы: . (19)
. (19) . (20)
. (20) выражением (15), получим следующие уравнения состояния:
выражением (15), получим следующие уравнения состояния: , (21)
, (21) , (22)
, (22) , (23)
, (23) – скорость звука на данной высоте.
– скорость звука на данной высоте.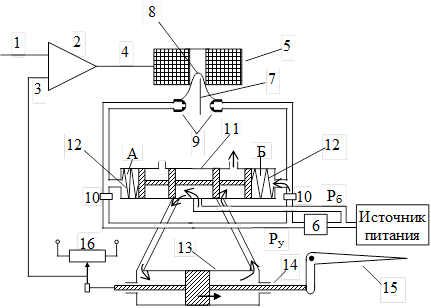
 , (24)
, (24) .
. ,
,  ,
,  ,
, 


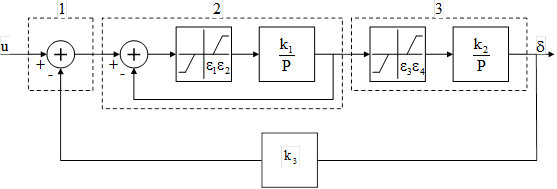
 угол наклона нелинейных характеристик равен 45 0.
угол наклона нелинейных характеристик равен 45 0.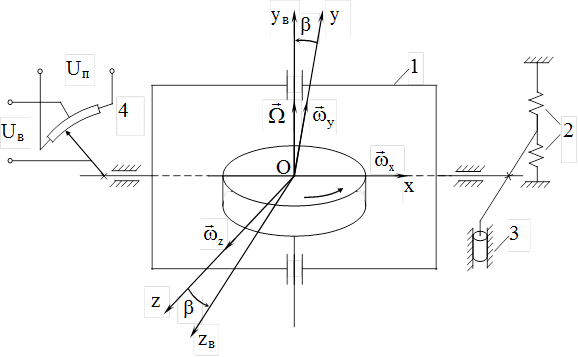 Рис. 5. Упрощенная схема демпфирующего гироскопа: 1 – двухстепенной гироскоп; 2 – пружина; 3 – демпфер; 4 – потенциометрический датчик.
Рис. 5. Упрощенная схема демпфирующего гироскопа: 1 – двухстепенной гироскоп; 2 – пружина; 3 – демпфер; 4 – потенциометрический датчик. с большой угловой скоростью
с большой угловой скоростью  . в этом случае ротор гироскопа обладает большим кинетическим моментом
. в этом случае ротор гироскопа обладает большим кинетическим моментом  , где
, где  – момент инерции ротора гироскопа относительно оси
– момент инерции ротора гироскопа относительно оси  . Пусть Jx – момент инерции гироскопа вместе с рамкой относительно оси Ox. Тогда уравнение моментов относительно оси Ox имеет следующий вид:
. Пусть Jx – момент инерции гироскопа вместе с рамкой относительно оси Ox. Тогда уравнение моментов относительно оси Ox имеет следующий вид: *) , (25)
*) , (25) , (26)
, (26) , (27)
, (27) – жесткость пружины, f – коэффициент демпфирования, получим
– жесткость пружины, f – коэффициент демпфирования, получим . (28)
. (28) малой, пренебрегая величиной
малой, пренебрегая величиной  по сравнению с
по сравнению с  , поскольку величина скорости вращения гироскопа велика, и введя обозначения
, поскольку величина скорости вращения гироскопа велика, и введя обозначения ,
,  ,
,  , (29)
, (29) . (30)
. (30) , то окончательно получим следующее выражение передаточной функции демпфирующего гироскопа:
, то окончательно получим следующее выражение передаточной функции демпфирующего гироскопа: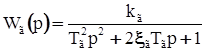 . (31)
. (31) ,
,  с,
с,  .
.
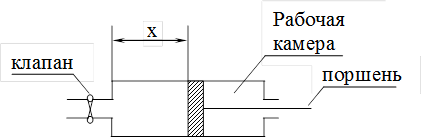
 , имеющей возможность перемещаться в направляющих, параллельных оси пружины. Эти направляющие определяют ось чувствительности прибора.
, имеющей возможность перемещаться в направляющих, параллельных оси пружины. Эти направляющие определяют ось чувствительности прибора. этого ускорения, то сумма сил, действующих на массу
этого ускорения, то сумма сил, действующих на массу  , (32)
, (32) .*) (33)
.*) (33) — жёсткость пружины,
— жёсткость пружины,  — коэффициент успокоительного демпфера. Изменение положения подвижной массы акселерометра
— коэффициент успокоительного демпфера. Изменение положения подвижной массы акселерометра  фиксируется потенциометрическим или индукционным линейным датчиком. Таким образом, передаточная функция акселерометра, определяемая как отношение изображений по Лапласу электрического выходного сигнала акселерометра к нормальному ускорению самолёта при нулевых начальных условиях, записывается следующим образом:
фиксируется потенциометрическим или индукционным линейным датчиком. Таким образом, передаточная функция акселерометра, определяемая как отношение изображений по Лапласу электрического выходного сигнала акселерометра к нормальному ускорению самолёта при нулевых начальных условиях, записывается следующим образом: . (34)
. (34) с,
с,  ,
,  В/ед.
В/ед.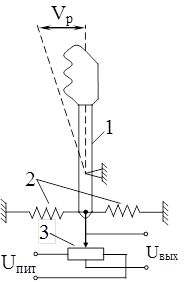
 в пределах ±20%.
в пределах ±20%.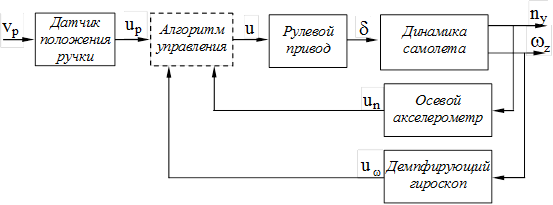
 , а также до сигналов перегрузки
, а также до сигналов перегрузки  , и угловой скорости тангажа
, и угловой скорости тангажа  . Определить полюсы и нули всех передаточных функций.
. Определить полюсы и нули всех передаточных функций. в уравнениях объекта помимо всего прочего накладывает и ограничения на выбор желаемых собственных значений наблюдателя.
в уравнениях объекта помимо всего прочего накладывает и ограничения на выбор желаемых собственных значений наблюдателя.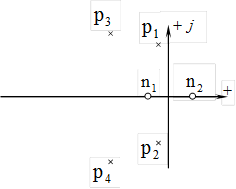
 можно воспользоваться разложением
можно воспользоваться разложением  на элементарные дроби:
на элементарные дроби: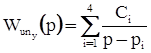 . (35)
. (35) (часто это условие выполняется, когда
(часто это условие выполняется, когда  ). Тогда можно приближенно записать:
). Тогда можно приближенно записать: . (36)
. (36) .
. является полиномом числителя разомкнутой системы по перегрузке и не зависит от обратных связей и, следовательно, от желаемых собственных значений.
является полиномом числителя разомкнутой системы по перегрузке и не зависит от обратных связей и, следовательно, от желаемых собственных значений. и
и  (обозначается
(обозначается  ) называется вектор
) называется вектор  , длина которого равна произведению absinj (j — угол между векторами
, длина которого равна произведению absinj (j — угол между векторами  ,
, В этих уравнениях для упрощения письма введены символические обозначения частных производных:
При исследовании динамики захода на посадку и посадки самолета уравнения (1.16—1.18) могут быть упрощены за счет пренебрежения (по их малости) членами, содержащими производные по параметрам р, Т, производными аэродинамических сил и их моментов по числу М. По аналогичным соображениям производную Ям можно заменить производной Pv, а приращение ДМ — приращением XV. Кроме того, в уравнении моментов необходимо учесть, что Mzv = 0 и Мрг =0, поскольку коэффициент момента mZo = 0. Тогда уравнения (1.16—1.18) примут вид:
mAV=-XvAV — Х’1Ая — О cos 0ОД0 + Pv cos а0ДК —
— Р„ s і П а0Д а — f — Р5 cos а0Д&л; (1.16а)

 т2?,2
т2?,2
Л, . « . Юг-^ =M-A. v0 K0
Заметим, что члены, содержащие управляющие координаты 6Д и 6В, находятся в правой части уравнений. Характеристический полином для системы уравнений движения неуправляемого самолета (с зажатыми органами управления) имеет следующий вид:
А (р) = Р4 -f яjP3 + йоР2 + а3р — f д4, (1.24)
где йі = йу + £а—+ — f г — ;
Согласно критерию Гурвица-Рауса движение, описываемое уравнением четвертого порядка, устойчиво тогда, когда коэффициенты аь а2, а3 и а4 положительны и а3(аіа2—аз)—а4аі2>0.
Эти условия обычно удовлетворяются не только для режимов захода на посадку, но и для всех эксплуатационных режимов полета дозвуковых гражданских самолетов. Корни характеристического полинома (1.24) обычно комплексно-сопряженные, различные по величине, и им соответствуют два различных колебательных движения. Одно из этих движений (короткопериодическое) имеет малый период с сильным затуханием. Другое движение (длиннопериодическое, или фугоидное) является медленно затухающим движением с большим периодом.
Вследствие этого возмущенное продольное движение может рассматриваться как взаимное наложение этих двух движений. Учитывая, что периоды этих движений весьма различны и что короткопериодическое колебание сравнительно быстро затухает (за 2—4 сек), оказывается возможным рассматривать короткопериодическое и длиннопериодическое движения изолированно друг от друга.
Возникновение короткопериодического движения связано с нарушением равновесия моментов сил, действующих в продольной плоскости самолета. Это нарушение может быть, например, результатом воздействия ветрового возмущения, приводящего к изменению угла атаки самолета, аэродинамических сил и моментов. Вследствие нарушения равновесия моментов самолет начинает поворачиваться относительно поперечной оси Oz. Если движение устойчиво, то он вернется к прежнему значению угла атаки. Если же нарушение равновесия моментов произошло вследствие отклонения руля высоты, то самолет в результате короткопериодического движения выйдет на новый угол атаки, при котором равновесие моментов, действующих относительно поперечной оси самолета, восстанавливается.
За время короткопериодического движения скорость самолета не успевает значительно измениться.
Поэтому при исследовании такого движения можно полагать, что оно происходит при скорости невозмущенного движения, т. е. можно принять ДУ—0. Полагая исходный режим близким к горизонтальному полету (0«О), можно исключить из рассмотрения член, содержащий Ьд.
В этом случае система уравнений, описывающих короткопериодическое движение самолета, принимает следующий вид:
 Д б + е j Д& — f ск Да — f саДа == с5Дйв; Дб = Д& — Да.
Д б + е j Д& — f ск Да — f саДа == с5Дйв; Дб = Д& — Да.
Характеристический полином для этой системы уравнении имеет вид:
 Л(/>)к = д(/>2 + аі/> + а. Ф где а=ьЛск+с> Ї
Л(/>)к = д(/>2 + аі/> + а. Ф где а=ьЛск+с> Ї
Короткопериодическое движение устойчиво, если коэффициенты «і и 02 положительны, что обычно и имеет место, поскольку в об ласти эксплуатационных режимов величины b*, сх, г» и существенно положительны.
 |
Характеристический полином (1.26) имеет следующие корни:
Отрицательная действительная часть корней /?і,2 указывает на то, что с течением времени отклонение угла атаки от исходного значе
 ния стремится к нулю. При этом величина
ния стремится к нулю. При этом величина
частоту собственных колебаний самолета в короткопериодическом движении, а величина ——- их затухание. Первая величина определяется главным образом коэффициентом ml, характеризующим степень продольной статической устойчивости самолета. В свою очередь коэффициент ml зависит от центровки самолета, т. е. от взаимного расположения точки приложения аэродинамической силы и центра масс самолета.
Вторая величина, обусловливающая затухание, определяется
в большой степени коэффициентами моментов mlz и т% ■ Коэффициент т’»гг зависит от площади горизонтального оперения и его расстояния от центра масс, а коэффициент ml еще и от запаздывания скоса потока у оперения. Практически, вследствие большого затухания, изменение угла атаки имеет характер, близкий к апериодическому.
Нулевой корень р3 указывает на нейтральность самолета относительно углов д и 0. Это является следствием сделанного выпи упрощения (ДУ = 0) и исключения из рассмотрения сил, связанным с изменением угла тангажа, что допустимо только для начального периода возмущенного продольного движения — короткопериоди ческого *. Изменения углов A# и ДО рассматриваются в длиннопе риодическом движении, которое упрощенно можно считать начинающимся после окончания короткопериодического движения. При
1 Подробно по этому вопросу см [26].
этом Ла=0, а величины углов тангажа и наклона траектории отличны от значений, имевших место в исходном невозмущенном движении. Вследствие этого нарушается равновесие проекций сил на касательную и нормаль к траектории, что приводит к возникновению длиннопериодических колебаний, в процессе которых происходят изменения не только углов О и 0, но и скорости полета. При условии устойчивости движения равновесие проекций сил восстанавливается и колебания затухают.
Таким образом, для упрощенного исследования длиннопериодического движения достаточно рассмотреть уравнения проекций сил на касательную и нормаль к траектории, полагая Да = 0. Тогда система уравнений продольного движения принимает вид:
 (1.28)
(1.28)
Характеристический полином для этой системы уравнений имеет вид:
 |
где ai = av—b^ a2=abbv — avbb.
Устойчивость движения обеспечивается при условии «і >0; й2>0. Затухание колебаний существенно зависит от значений производной Pv и коэффициента сХа, а частота собственных колебаний— еще и от коэффициента су„ поскольку эти коэффициенты определяют величины проекций сил на касательную и нормаль к траектории.
Следует отметить, что для случаев горизонтального полета, набора высоты и снижения с малыми углами 0 коэффициент Ьв имеет очень малую величину. При исключении члена, содержащего
из второго уравнения (1.28) получаем at = av; a2 = aebv.
http://www.bestreferat.ru/referat-220259.html
http://ooobskspetsavia.ru/2015/11/05/uravneniya-prodolnogo-dvizheniya-samoleta-v-spokojnoj-atmosfere/