Метод исключения — сведение системы ДУ к одному уравнению
Частным случаем канонической системы дифференциальных уравнений является одно уравнение n-го порядка, разрешенное относительно старшей производной.
Введением новых функций
это уравнение заменяется нормальной системой уравнений
Можно утверждать и обратное, что, вообще говоря, нормальная система уравнений первого порядка
эквивалентна одному уравнению порядка . На этом основан один из методов интегрирования систем дифференциальных уравнений — метод исключения .
Проиллюстрируем этот метод на примере системы двух уравнений:
Здесь — постоянные коэффициенты, а и — заданные функции; и — искомые функции. Из первого уравнения системы (1) находим
Подставляя во второе уравнение системы вместо у правую часть (2), а вместо производную от правой части (2), получаем уравнение второго порядка относительно
где — постоянные. Отсюда находим . Подставив найденное выражение для и в (2), найдем .
Пример 1. Проинтегрировать систему уравнений
Решение. Из первого уравнения системы (3) находим , тогда
Подставляя (4) во второе уравнение системы (3), получаем линейное дифференциальное уравнение с постоянными коэффициентами второго порядка
Общее решение уравнения (5)
Находя производную по от (6), получаем
Общее решение системы (3):
Пример 2. Решить задачу Коши для системы
Решение. Из второго уравнения системы (7) находим
Подставляя (9) и (10) в первое уравнение системы (7), получаем уравнение , общее решение которого
Подставляя (11) в (9), найдем . Общее решение системы (7)
При начальных условиях (8) из (12) получим систему уравнений для определения
решая которую, найдем . Подставляя эти значения и в (12), получаем решение поставленной задачи Коши:
Пример 3. Решить систему уравнений
Решение. Из первого уравнения системы находим
Подставляя эти выражения для и во второе уравнение, получаем
Считая , из последнего уравнения имеем и после интегрирования получим . Теперь легко находим
Общее решение данной системы
Замечание. Не всякая система дифференциальных уравнений может быть сведена к одному уравнению более высокого порядка. Например,
не сводится к одному уравнению второго порядка. Ее общее решение .
Кривые второго порядка — определение и построение с примерами решения
Содержание:
Геометрической фигурой или просто фигурой на плоскости называется множество точек. Задать фигуру — значит указать, из каких точек плоскости она состоит. Одним из важных способов задания фигуры на плоскости является ее задание при помощи уравнений с двумя неизвестными. Произвольное уравнение с двумя неизвестными х и у записывается в виде 
- Если точка М(а,Ь) принадлежит фигуре Ф, то координаты (а,Ь) являются решениями уравнения

- если пара чисел (c,d) является решением уравнения F(x,y) = 0, то точка N(c,d) принадлежит фигуре Ф.
Это определение в более компактной записи выглядит следующим образом. Уравнение называется уравнением фигуры, если  , то есть (а, b) — решение уравнения F(x,y) = 0.
, то есть (а, b) — решение уравнения F(x,y) = 0.
Из определения уравнения фигуры следует, что фигура Ф состоит только из тех точек плоскости, координаты которых являются решениями уравнения , т.е. уравнение фигуры задает эту фигуру.
Возможны два вида задач:
- дано уравнение и надо построить фигуру Ф, уравнением которой является ;
- дана фигура Ф и надо найти уравнение этой фигуры.
Первая задача сводится к построению графика уравнения и решается, чаще всего, методами математического анализа.
Для решения второй задачи, как следует из определения уравнения фигуры, достаточно:
- Задать фигуру геометрически, т.е. сформулировать условие, которому удовлетворяют только точки фигуры (довольно часто определение фигуры содержит такое условие);
- Записать в координатах условие, сформулированное в первом пункте.
Эллипс
Эллипсом называется линия, состоящая из всех точек плоскости, для каждой из которых сумма расстояний до двух данных точек  , есть величина постоянная (большая, чем расстояние между
, есть величина постоянная (большая, чем расстояние между  ).
).
Точки  называются фокусами эллипса. Обозначив расстояние между фокусами через 2с, а сумму расстояний от точек эллипса до фокусов через 2а, имеем с b. В этом случае а называется большой полуосью, a b — малой.
называются фокусами эллипса. Обозначив расстояние между фокусами через 2с, а сумму расстояний от точек эллипса до фокусов через 2а, имеем с b. В этом случае а называется большой полуосью, a b — малой.
Если а =Ь, то уравнение (7.3) можно переписать в виде:
 (7.5)
(7.5)
Это уравнение окружности с центром в начале координат. Эллипс (3) можно получить из окружности (4) сжатием плоскости к оси Ох. Пусть на плоскости выбрана прямоугольная система координат Оху. Тогда преобразование, переводящее произвольную точку М(х,у) в точку  координаты которой задаются формулами
координаты которой задаются формулами  будет окружность (4) переводить в эллипс, заданный соотношением
будет окружность (4) переводить в эллипс, заданный соотношением 
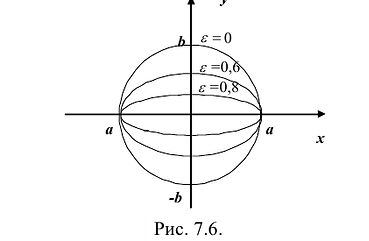
Число  называется эксцентриситетом эллипса. Эксцентриситет
называется эксцентриситетом эллипса. Эксцентриситет  характеризует форму эллипса: чем ближе к нулю, тем больше эллипс похож на окружность; при увеличении
характеризует форму эллипса: чем ближе к нулю, тем больше эллипс похож на окружность; при увеличении  становится более вытянутым
становится более вытянутым
Фокальными радиусами точки М эллипса называются отрезки прямых, соединяющие эту точку с фокусами  . Их длины
. Их длины  и
и  задаются формулами
задаются формулами  Прямые
Прямые  называются директрисами эллипса. Директриса
называются директрисами эллипса. Директриса  называется левой, а
называется левой, а  — правой. Так как для эллипса
— правой. Так как для эллипса  и, следовательно, левая директриса располагается левее левой вершины эллипса, а правая — правее правой вершины.
и, следовательно, левая директриса располагается левее левой вершины эллипса, а правая — правее правой вершины.
Директрисы обладают следующим свойством: отношение расстояния г любой точки эллипса от фокуса к ее расстоянию d до соответствующей директрисы есть величина постоянная, равная эксцентриситету, т.е. 
Гипербола
Гиперболой называется линия, состоящая из всех точек плоскости, модуль разности расстояний от которых до двух данных точек  есть величина постоянная (не равная нулю и меньшая, чем расстояние между
есть величина постоянная (не равная нулю и меньшая, чем расстояние между  ).
).
Точки  называются фокусами гиперболы. Пусть по-прежнему расстояние между фокусами равно 2с. Модуль расстояний от точек гиперболы до фокусов
называются фокусами гиперболы. Пусть по-прежнему расстояние между фокусами равно 2с. Модуль расстояний от точек гиперболы до фокусов  обозначим через а. По условию, а 0) (рис. 9.7). Ось абсцисс проведём через фокус F перпендикулярно директрисе. Начало координат расположим посередине между фокусом и директрисой. Пусть А — произвольная точка плоскости с координатами (х, у) и пусть
обозначим через а. По условию, а 0) (рис. 9.7). Ось абсцисс проведём через фокус F перпендикулярно директрисе. Начало координат расположим посередине между фокусом и директрисой. Пусть А — произвольная точка плоскости с координатами (х, у) и пусть  . Тогда точка А будет лежать на параболе, если r=d, где d- расстояние от точки А до директрисы. Фокус F имеет координаты
. Тогда точка А будет лежать на параболе, если r=d, где d- расстояние от точки А до директрисы. Фокус F имеет координаты  .
.
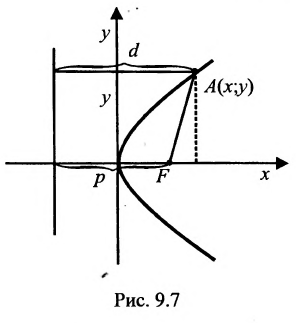
Тогда  А расстояние
А расстояние  Подставив в формулу r=d, будем иметь
Подставив в формулу r=d, будем иметь . Возведя обе части равенства в квадрат, получим
. Возведя обе части равенства в квадрат, получим
 или
или
 (9.4.1)
(9.4.1)
Уравнение (9.4.1)- каноническое уравнение параболы. Уравнения  также определяют параболы.
также определяют параболы.
Легко показать, что уравнение  , определяет параболу, ось симметрии которой перпендикулярна оси абсцисс; эта парабола будет восходящей, если а > 0 и нисходящей, если а
, определяет параболу, ось симметрии которой перпендикулярна оси абсцисс; эта парабола будет восходящей, если а > 0 и нисходящей, если а  О. Для этого выделим полный квадрат:
О. Для этого выделим полный квадрат:

и сделаем параллельный перенос по формулам
В новых координатах преобразуемое уравнение примет вид:  где р — положительное число, определяется равенством
где р — положительное число, определяется равенством  .
.
Пример:
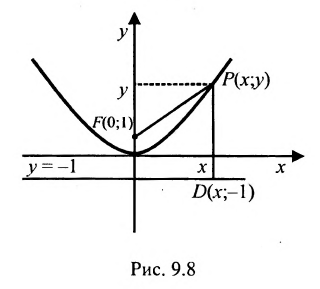
Пусть заданы точка F и прямая у =-1 (рис. 9.8). Множество точек Р(х, y) для которых расстояние |PF| равно расстоянию , называется параболой. Прямая у = -1 называется директрисой параболы, а точка F — фокусом параболы. Чтобы выяснить, как располагаются точки Р, удовлетворяющие условию
, называется параболой. Прямая у = -1 называется директрисой параболы, а точка F — фокусом параболы. Чтобы выяснить, как располагаются точки Р, удовлетворяющие условию , запишем это равенство с помощью координат:
, запишем это равенство с помощью координат: 
 , или после упрощения
, или после упрощения  . Это уравнение геометрического места точек, образующих параболу (рис. 9.8).
. Это уравнение геометрического места точек, образующих параболу (рис. 9.8).
Кривые второго порядка на плоскости
Кривой второго порядка называется фигура на плоскости, задаваемая в прямоугольной системе координат уравнением второй степени относительно переменных х и у:

где коэффициенты А, В и С не равны одновременно нулю 
Любая кривая второго порядка на плоскости принадлежит к одному из типов: эллипс, гипербола, парабола, две пересекающиеся прямые, 2 параллельные прямые, прямая, точка, пустое множество.
Кривая второго порядка принадлежит эллиптическому типу, если коэффициент В равен нулю: В=0, а коэффициенты А и С имеют одинаковые знаки: АС>0.
Кривая второго порядка принадлежит гиперболическому типу, если коэффициент В равен нулю: В=0, а коэффициенты А и С имеют противоположные знаки: АС 2с. Точка М(х,у) принадлежит эллипсу тогда и только тогда, когда ее координаты удовлетворяют уравнению
 которое называют каноническим уравнением эллипса.
которое называют каноническим уравнением эллипса.
Число а называют большей полуосью эллипса, число  — мень-
— мень-
шей полуосью эллипса, 2а и 2b — соответственно большей и меньшей осями эллипса. Точки  называют вершинами эллипса, а
называют вершинами эллипса, а  — его фокусами (рис. 12).
— его фокусами (рис. 12).
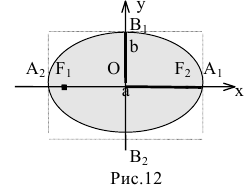
Координатные оси являются осями симметрии эллипса, а начало координат — его центром симметрии. Центр симметрии эллипса называется центром эллипса.
Замечание. Каноническое уравнение эллипса можно рассматривать и в случае b>а. Оно определяет эллипс с большей полуосью b, фокусы которого лежат на оси Оу.
В случае а=b каноническое уравнение эллипса принимает вид  и определяет окружность радиуса а с центром в начале координат.
и определяет окружность радиуса а с центром в начале координат.
Эксцентриситетом эллипса называется отношение фокусного расстояния к длине большей оси.
Так, в случае а>b эксцентриситет эллипса выражается формулой:

Эксцентриситет изменяется от нуля до единицы  и характеризует форму эллипса. Для окружности
и характеризует форму эллипса. Для окружности  Чем больше эксцентриситет, тем более вытянут эллипс.
Чем больше эксцентриситет, тем более вытянут эллипс.
Пример:
Показать, что уравнение

является уравнением эллипса. Найти его центр, полуоси, вершины, фокусы и эксцентриситет. Построить кривую.
Решение:
Дополняя члены, содержащие х и у соответственно, до полных квадратов, приведем данное уравнение к каноническому виду:

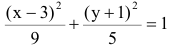 — каноническое уравнение эллипса с центром в точке
— каноническое уравнение эллипса с центром в точке  большей полуосью а=3 и меньшей полуосью
большей полуосью а=3 и меньшей полуосью 
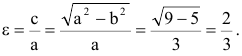
Найдем эксцентриситет эллипса:
Для вычисления вершин и фокусов удобно пользовать новой прямоугольной системой координат, начало которой находится в точке  а оси
а оси  параллельны соответственно осям Ох, Оу и имеют те же направления (осуществили преобразование параллельного переноса). Тогда новые координаты точки будут равны ее старым координатам минус старые координаты нового начала, т.е.
параллельны соответственно осям Ох, Оу и имеют те же направления (осуществили преобразование параллельного переноса). Тогда новые координаты точки будут равны ее старым координатам минус старые координаты нового начала, т.е. 
В новой системе координат координаты  вершин и фокусов гиперболы будут следующими:
вершин и фокусов гиперболы будут следующими:
Переходя к старым координатам, получим:
Построим график эллипса.
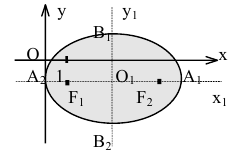 Задача решена.
Задача решена.
Гиперболой называется множество всех точек плоскости, для которых модуль разности расстояний до двух данных точек, называемых фокусами, есть величина постоянная, меньшая расстояния между фокусами.
Так же, как и для эллипса, геометрическое свойство точек гиперболы выразим аналитически. Расстояние между фокусами назовем фокусным расстоянием и обозначим через 2с. Постоянную величину обозначим через 2а: 2а
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Дифференциальные уравнения, приводимые к уравнениям первого порядка
Вы будете перенаправлены на Автор24
Дифференциальные уравнения второго порядка, в которых правая часть не зависит от неизвестной функции и её производной
Таким дифференциальным уравнением второго порядка является уравнение вида $y»=f\left(x\right)$. В нем правая часть не зависит от неизвестной функции $y$ и её производной $y’$, а зависит только от $x$. Решается это уравнение последовательным интегрированием.
Представим его в таком виде: $\frac
Интегрируем первый раз, используя то свойство, что неопределенный интеграл от дифференциала некоторой функции равен сумме этой функции и произвольной постоянной: $\int d\left(y’\right) =\int f\left(x\right)\cdot dx $ или $y’=\int f\left(x\right)\cdot dx +C_ <1>$, где $C_ <1>$ — произвольная постоянная.
Таким образом, дифференциальное уравнение второго порядка сведено теперь к дифференциальному уравнению первого порядка, которое можно представить в таком виде: $dy=\left(\int f\left(x\right)\cdot dx +C_ <1>\right)\cdot dx$.
Интегрируем полученное дифференциальное уравнение повторно: $y=\int \left(\int f\left(x\right)\cdot dx +C_ <1>\right)\cdot dx =\int \left(\int f\left(x\right)\cdot dx \right)\cdot dx +\int C_ <1>\cdot dx$. Окончательно получаем:$y=\int \left(\int f\left(x\right)\cdot dx \right)\cdot dx +C_ <1>\cdot x+C_ <2>$, где $C_ <2>$ — произвольная постоянная.
Процесс интегрирования завершен. Получена неизвестная функция $y$, которая является общим решением данного дифференциального уравнения второго порядка.
Алгоритм решения дифференциального уравнения второго порядка $y»=f\left(x\right)$ может быть представлен в следующем виде:
- находим интеграл $I_ <1>\left(x\right)=\int f\left(x\right)\cdot dx $ и записываем первую производную искомой функции в виде $y’\left(x,C_ <1>\right)=I_ <1>\left(x\right)+C_ <1>$;
- находим интеграл $I_ <2>\left(x\right)=\int I_ <1>\left(x\right)\cdot dx $ и записываем окончательно общее решение данного дифференциального уравнения: $y=I_ <2>\left(x\right)+C_ <1>\cdot x+C_ <2>$;
- для поиска частного решения начальные условия подставляем в выражение для первой производной $y’$, а также в общее решение; в результате находим значения произвольных постоянных $C_ <1>$ и $C_ <2>$.
Готовые работы на аналогичную тему
Найти общее решение дифференциального уравнения второго порядка $y»=4$. Записать также его частное решение, которое удовлетворяет начальным условиям $y=1$ при $x=1$, $y’=1$ при $x=1$.
В данном дифференциальном уравнении правая часть не зависит ни от неизвестной функции $y$, ни от её производной $y’$. Следовательно, оно решается последовательным интегрированием два раза подряд.
Находим интеграл $I_ <1>\left(x\right)=\int f\left(x\right)\cdot dx =\int 4\cdot dx =4\cdot x$. Записываем выражение для первой производной в виде $y’\left(x,C_ <1>\right)=I_ <1>\left(x\right)+C_ <1>$, то есть $y’=4\cdot x+C_ <1>$.
Находим интеграл $I_ <2>\left(x\right)=\int I_ <1>\left(x\right)\cdot dx =\int 4\cdot x\cdot dx =2\cdot x^ <2>$. Записываем окончательно общее решение в виде $y=I_ <2>\left(x\right)+C_ <1>\cdot x+C_ <2>$. Получаем: $y=2\cdot x^ <2>+C_ <1>\cdot x+C_ <2>$.
Ищем частное решение. Подставляем начальное условие $y’=1$ при $x=1$ в выражение для $y’$: $1=4\cdot 1+C_ <1>$, откуда $C_ <1>=-3$. Подставляем начальное условие $y=1$ при $x=1$ в выражение для $y$: $1=2\cdot 1^ <2>+\left(-3\right)\cdot 1+C_ <2>$, откуда $C_ <2>=2$. Таким образом, частное решение имеет вид: $y=2\cdot x^ <2>-3\cdot x+2$.
Дифференциальные уравнения второго порядка, не содержащие неизвестной функции
Указанные дифференциальные уравнения второго порядка допускают понижение порядка посредством замены переменных. После этого к полученным дифференциальным уравнениям первого порядка могут быть применены известные методы решения.
Дифференциальное уравнение второго порядка, не содержащее неизвестной функции $y$, имеет вид $y»=f\left(x,y’\right)$.
Для его решения применяют замену $y’=z\left(x\right)$.
При этом $y»=z’\left(x\right)$. После подстановки данное дифференциальное уравнение приобретает вид дифференциального уравнения первого порядка относительно $z$, то есть $z’=f\left(x,z\right)$. Решая его, находим $z\left(x\right)=\phi \left(x,C_ <1>\right)$.
В свою очередь, поскольку $y’=z\left(x\right)$, то $y’=\phi \left(x,C_ <1>\right)$. Это также дифференциальное уравнение первого порядка, которое допускает непосредственное интегрирование. Следовательно, интегрируя еще раз, окончательно получаем общее решение $y=\int \phi \left(x,C_ <1>\right)\cdot dx +C_ <2>$.
Алгоритм решения дифференциального уравнения второго порядка $y»=f\left(x,y’\right)$ может быть представлен в следующем виде:
- переписываем данное дифференциальное уравнение в виде дифференциального уравнения первого порядка относительно переменной $z$, формально заменив $y»$ на $z’$, а $y’$ — на $z$;
- полученное дифференциальное уравнение первого порядка решаем одним из подходящих известных методов;
- найденное решение $z=\phi \left(x,C_ <1>\right)$ представляем в виде дифференциального уравнения первого порядка $y’=\phi \left(x,C_ <1>\right)$, которое допускает непосредственное интегрирование;
- находим интеграл $I=\int \phi \left(x,C_ <1>\right)\cdot dx $ и получаем общее решение в виде $y=I+C_ <2>$.
Найти общее решение дифференциального уравнения$y»-\frac
Данное дифференциальное уравнение не содержит неизвестной функции $y$, поэтому переписываем его в виде дифференциального уравнения первого порядка относительно переменной $z$, формально заменив $y»$ на $z’$, а $y’$ — на $z$. Получаем: $z’-\frac
Это дифференциальное уравнение первого порядка является линейным неоднородным, решая которое известным методом, получаем $z=\left(3\cdot x+C_ <1>\right)\cdot x$.
Найденное решение представляем в виде дифференциального уравнения первого порядка $y’=\phi \left(x,C_ <1>\right)$, то есть $y’=\left(3\cdot x+C_ <1>\right)\cdot x$. Это дифференциальное уравнение допускает непосредственное интегрирование.
Находим интеграл $I=\int \phi \left(x,C_ <1>\right)\cdot dx =\int \left(3\cdot x+C_ <1>\right)\cdot x\cdot dx =x^ <3>+C_ <1>\cdot \frac
Дифференциальные уравнения второго порядка, не содержащие независимой переменной
Указанные дифференциальные уравнения второго порядка также допускают понижение порядка посредством замены переменных. После этого к полученным дифференциальным уравнениям первого порядка могут быть применены известные методы решения.
Дифференциальное уравнение второго порядка, не содержащее независимой переменной $x$, имеет вид $y»=f\left(y,y’\right)$.
Для его решения применяют замену $y’=z\left(y\right)$.
Подставляем выражения для $y’$ и $y»$ в данное дифференциальное уравнение: $z\cdot \frac
В свою очередь, поскольку $\frac
Алгоритм решения дифференциального уравнения второго порядка $y»=f\left(y,y’\right)$ может быть представлен в следующем виде:
- переписываем данное дифференциальное уравнение в виде дифференциального уравнения первого порядка относительно переменной $z$, формально заменив $y»$ на $z\cdot z’$, а $y’$ — на $z$;
- полученное дифференциальное уравнение первого порядка решаем одним из подходящих известных методов;
- найденное решение $z=\phi \left(y,C_ <1>\right)$ представляем в виде дифференциального уравнения первого порядка $\frac
=\phi \left(y,C_ <1>\right)$, которое является дифференциальным уравнением с разделяющимися переменными; - находим интеграл $I=\int \frac
<\phi \left(y,C_<1>\right)> $ и получаем общее решение в виде $I=x+C_ <2>$.
http://www.evkova.org/krivyie-vtorogo-poryadka
http://spravochnick.ru/matematika/differencialnye_uravneniya/differencialnye_uravneniya_privodimye_k_uravneniyam_pervogo_poryadka/