Динамика материальной точки. Все законы и теоремы
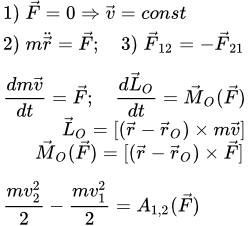
Законы динамики
Первый закон Ньютона (закон инерции Галилея)
Существуют такие системы отсчета, относительно которых любая материальная точка, не взаимодействующая с другими телами и точками, движется прямолинейно и равномерно. В частности, если точка покоилось в определенный момент времени, то она будет покоиться и в последующие моменты.
Не во всех системах отсчета выполняется закон инерции. Например, если мы выберем систему отсчета, связанную с ускоряющейся ракетой, то относительно этой системы, не взаимодействующие материальные точки, не будут двигаться прямолинейно и равномерно.
Инерциальная система отсчета – это система отсчета, в которой справедлив закон инерции.
Движение по инерции – это движение точки, совершаемое при отсутствии действующих на нее сил.
Второй закон Ньютона (основной закон динамики)
Взаимодействие на выбранную материальную точку со стороны других тел описывается вектором, который называется силой. При этом, в инерциальных системах отсчета, действие силы приводит к ускорению точки , которое пропорционально приложенной силе, имеет одинаковое с ней направление, и обратно пропорционально массе точки:
(1) .
Если есть радиус-вектор, проведенный из начала координат к точке, то ускорение есть вторая производная радиус-вектора по времени:
.
Производную по времени, в теоретической механике, обозначают точкой над переменной, а не штрихом, как в математическом анализе.
Если на точку действует не одна, а n сил, то в правой части производится суммирование по всем силам, действующих на точку. Тогда уравнение (1) примет вид:
(2) .
Третий закон динамики (закон равенства действия и противодействия)
Если две материальные точки действуют друг на друга, то сила, с которой первая точка действует на вторую, равна по абсолютной величине и противоположна по направлению силе, с которой вторая точка действует на первую. При этом силы направлены вдоль прямой, соединяющей точки.
Закон независимости сил
Несколько одновременно действующих на материальную точку сил сообщают точке такое ускорение, какое сообщила бы ей одна сила, равная их геометрической сумме.
То есть уравнение (2) можно записать в виде:
, где .
Задачи динамики
Первая задача динамики
Зная закон движения точки, определить действующую на нее силу.
Вторая (основная) задача динамики
Зная действующие на точку силы, определить ее закон движения.
Основные виды сил
Единицей измерения силы в СИ является 1 ньютон (1 Н = кг·м/с 2 ). Это сила, которую нужно приложить к точке массой 1 кг, чтобы она получила ускорение 1 м/с 2 .
Сила тяжести.
Сила тяжести действует на любую материальную точку, находящуюся на поверхности Земли. Она пропорциональна массе точки и равна
,
где – ускорение свободного падения, направленное вниз. Его величина зависит от широты и высоты над уровнем моря. Стандартное значение, принятое при построении систем единиц, составляет м/с 2 .
Сила тяготения.
.
Здесь – массы точек, r – расстояние между ними, Н·м 2 /кг 2 – гравитационная постоянная.
Для точки массы m на поверхности Земли имеем: . Отсюда . Тогда силу тяготения Земли можно вычислять по формуле:
,
где R = 6371 км – радиус Земли; r – расстояние от точки до центра Земли.
Сила электростатического взаимодействия.
,
где – величины зарядов; r – расстояние между ними; Н·м 2 /Кл 2 – коэффициент. Одноименные заряды отталкиваются, разноименные – притягиваются.
Сила трения скольжения
возникает при скольжении одного тела по поверхности другого. Она направлена в сторону, противоположную скорости движения. Ее величина определяется по формуле:
F = fN ,
где N – сила давления, перпендикулярная поверхности, с которой скользящее тело прижимается к поверхности; f – коэффициент трения, который зависит от материалов соприкасаемых тел.
Сила упругости.
Эта сила возникает при деформации упругих тел. Это могут быть растяжения, сжатия и изгибы. Она определяется по формуле
F = cλ ,
где λ – величина деформации; c – коэффициент, который зависит от материала упругого тела. Для пружины λ – это удлинение или сжатие пружины; c – коэффициент жесткости.
Сила вязкого трения.
При движении тела в вязкой среде с небольшими скоростями, на него действует сила трения, пропорциональная скорости движения:
F = μv ,
где v – скорость тела; μ – коэффициент сопротивления.
При больших скоростях, сила трения пропорциональна квадрату скорости.
Дифференциальные уравнения движения точки
Спроектируем уравнение (2) на оси прямоугольной системы координат. Пусть радиус вектор точки имеет в этой системе компоненты (проекции) . Тогда из векторного уравнения (2) получаем систему уравнений:
.
Это есть дифференциальные уравнения движения точки в прямоугольной системе координат.
Спроектируем уравнение (2) на оси естественного трехгранника:
.
Здесь – единичный вектор, направленный по касательной к траектории; – единичный вектор, перпендикулярный и лежащий в касательной плоскости траектории; – единичный вектор, перпендикулярный и . Поскольку , то .
Вводим пройденный путь s , измеренный вдоль дуги траектории точки. Пусть ρ – радиус кривизны траектории в рассматриваемой точке. Тогда, для естественного способа задания движения точки, уравнения движения примут вид:
.
Уравнения движения в полярных координатах для плоского движения:
.
Прямолинейное движение точки
Пусть ось x направлена вдоль линии движения точки. Тогда уравнение движения имеет вид:
(3) .
Его общее решение:
,
где – произвольные постоянные. Их находят из начальных условий:
.
Если сила Fx зависит только от времени, то из уравнения (3) сначала определяют скорость vx , а затем координату x , последовательно интегрируя уравнения:
.
Если сила зависит только от координаты x , то выполняют преобразование:
;
;
.
Колебательное движение материальной точки
Свободные колебания
Рассмотрим движение груза на пружинке. Считаем, что груз является материальной точкой; массой пружины можно пренебречь; и отсутствует сила тяжести. Пусть движение происходит вдоль оси x . За начало отсчета выберем такое положение груза, при котором пружина не деформирована. Тогда на точку действует только восстанавливающая сила упругости пружины, которая определяется по закону Гука:
(К1) ,
где x – деформация пружины; c – коэффициент жесткости. Он равен силе, которая возникает при деформации, равной единице (один метр) и имеет размерность [Н/м]. Из (К1) видно, что сила является восстанавливающей, то есть направлена так, чтобы вернуть точку в начало координат к недеформированному состоянию. Сила такого вида возникает не только при деформации пружины, но и во многих других случаях при небольшом отклонении точки от равновесного положения.
Составим уравнение движения точки и выполняем преобразования:
.
Введем обозначение . В результате получаем.
(К2) .
Уравнение (К2) называется дифференциальным уравнением свободных колебаний. Его также называют дифференциальным уравнением гармонических колебаний. Оно является линейным однородным дифференциальным уравнением второго порядка.
Ищем его решение в виде . Получаем характеристическое уравнение:
.
Оно имеет два мнимых корня: . Тогда общее решение уравнения (К2) имеет вид:
,
где и – произвольные постоянные. Они определяются из начальных условий. Пусть – координата и скорость точки в начальный момент времени , тогда
;
.
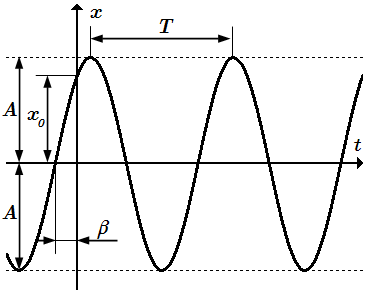
График гармонического движения точки.
Часто бывает удобно вместо постоянных интегрирования и перейти к новым постоянным A и β по формулам: . Тогда
(К3) .
Это есть уравнение гармонического колебательного движения точки. Здесь – амплитуда колебаний;
– фаза колебаний;
β – начальная фаза, ;
– циклическая частота колебаний, которую также называют угловой или собственной.
Период колебаний: .
Частота колебаний: – это число циклов колебаний, совершенных в единицу времени. Она широко применяется в технике, однако для математического описания более удобна угловая частота, которую мы будем использовать в дальнейшем и называть просто частотой.
Частота k и период T не зависят от начальных условий, а амплитуда и фаза – зависят. Кроме этого, k и T не зависят от амплитуды. Колебания, у которых частота и период не зависят от амплитуды, называют изохорными колебаниями. Если рассмотреть колебания с большой амплитудой, при которой закон Гука (К1) не выполняется, то уравнение (К2) не будет линейным и колебания не будут изохорными.
Влияние постоянной силы
Пусть теперь, наряду с восстанавливающей силой (К1), на точку действует постоянная сила P , например сила тяжести. Тогда уравнение движения примет вид:
.
Это приводит к смещению центра колебаний в сторону действия силы P на величину
δ ст = P/c .
Это смещение называют статическим отклонением. Если P – сила тяжести, то
.
Колебания при вязком трении
Пусть на точку, кроме силы упругости пружины, действует сила сопротивления среды. При малых скоростях она пропорциональна скорости точки:
. Это так называемое вязкое трение. Составим уравнение движения:
. Обозначив μ/m= 2 b , получаем:
(К4) . Составляем характеристическое уравнение:
(К5) . Оно имеет два корня:
.
Затухающие колебания
При b , корни характеристического уравнения (К5) комплексные:
. Тогда общее решение уравнения (К4) имеет вид:
,
где . Обозначим , . Тогда
(К6) .
, ;
– амплитуда (переменная величина);
b – коэффициент затухания;
– частота затухающих колебаний;
– период затухающих колебаний. Он больше периода свободных колебаний. При небольшом коэффициенте затухания (при b/k ≪ 1 ) T 1 ≈ T .
Колебания, происходящие по закону (К6) называются затухающими. График затухающих колебаний заключен между двумя кривыми x = ±Ae –bt , симметричными относительно оси t .
Затухающие колебания можно рассматривать как гармонические колебания с переменной амплитудой . Относительное изменение переменной амплитуды за период колебания называется декрементом колебаний. Он равен
. Модуль логарифма декремента называется логарифмическим декрементом. Он равен .
Апериодическое движение точки
При (или ) корни характеристического уравнения (К5) действительные. Поэтому движение точки является апериодическим.
При (или ) характеристическое уравнение (К5) имеет два различных действительных корня:
. Тогда общее решение уравнения (К4) имеет вид:
(К7) .
Сюда не входят тригонометрические функции. Поэтому это апериодическое движение. Точка может пройти через положение равновесия x = 0 не более одного раза.
Закон движения (К7) можно выразить через гиперболические функции, если положить: . Тогда
.
Перейдем к новым постоянным интегрирования A и β , выполнив подстановку:
. Тогда
.
При b = k характеристическое уравнение (К5) имеет два кратных вещественных корня . Общее решение уравнения (К4) имеет вид:
.
Движение также апериодическое. Точка может пройти через положение равновесия x = 0 не более одного раза.
Вынужденные колебания
Рассмотрим случай, когда кроме восстанавливающей силы , на точку действует возмущающая сила, меняющаяся по гармоническому закону:
(К8) . Составим уравнение движения:
.
Введем обозначение h=H/m . Разделив на m , получаем дифференциальное уравнение вынужденных колебаний:
(К9) .
Это линейное неоднородное дифференциальное уравнение с постоянными коэффициентами со специальной неоднородной частью. Его общее решение равно сумме общего решения однородного уравнения и частного (то есть любого, отличного от нулевого) решения данного уравнения:
;
;
.
Общее решение однородного уравнения: .
Ищем частное решение в виде . В результате получаем:
;
.
Коэффициент динамичности. Действие постоянной возмущающей силы величины H приводит к статическому отклонению . Периодическая возмущающая сила (К8) с амплитудой H приводит к периодическим колебаниям с амплитудой . В связи с этим вводят коэффициент динамичности: .
Он показывает, во сколько раз амплитуда колебаний превосходит статическое отклонение.
Явление резонанса и биения
Когда частота возмущающей силы равна частоте собственных колебаний p = k , коэффициент динамичности стремится к бесконечности, амплитуда колебаний неограниченно возрастает. Это явление называется резонансом. Уравнение движения точки при p = k имеет вид:
(К10) .
Оно имеет частное решение
.
Общее решение уравнения (К10):
.
Это уравнение показывает, что амплитуда вынужденных колебаний возрастает пропорционально времени. Фаза вынужденных колебаний отстает от фазы возмущающей силы на π/ 2 .
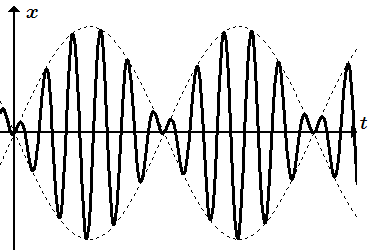
Биения.
Когда частота p возмущающей силы близка к собственной частоте k колебания точки, p/k ≈ 1 , возникает явление, называемое биениями. В этом случае частное решение уравнения (К9) имеет вид:
,
где .
Происходит наложение колебаний. Их можно рассматривать как вынужденные колебания частоты с переменной амплитудой, которая является периодической функцией с частотой .
Вынужденные колебания при наличии вязкого трения
Составим уравнение движения вынужденных колебаний при наличии вязкого трения:
.
Получаем дифференциальное уравнение:
.
Его общее решение имеет вид.
1) при b :
;
2) при b > k :
;
3) при b = k :
.
Здесь ;
ε определяется из уравнений:
.
Величины A и β являются постоянными интегрирования. Они определяются из начальных условий.
Общие теоремы динамики точки
Теорема об изменении количества движения материальной точки
Теорема об изменении количества движения материальной точки в дифференциальной форме
Изменение количества движения материальной точки за бесконечно малый промежуток времени dt равно элементарному импульсу равнодействующей сил, приложенных к этой точке:
.
Эту теорему можно сформулировать так:
Производная по времени от количества движения материальной точки равна равнодействующей сил, приложенных к этой точке:
(Т1) .
Проектируя это векторное уравнение на оси координат, получаем три скалярных уравнения:
.
Если проинтегрировать уравнение (Т1) по времени от начального момента времени t = 0 до конечного момента t = t1 , то получим теорему в интегральной форме.
Теорема об изменении количества движения материальной точки в интегральной форме
изменение количества движения материальной точки за конечный промежуток времени [0,t1] равно импульсу силы, приложенной к этой точке, за тот же промежуток времени:
.
Здесь – скорость точки в моменты времени t = 0 и t = t 1 , соответственно.
Теорема об изменении момента количества движения материальной точки
Теорема об изменении момента количества движения материальной точки
Производная по времени от момента количества движения материальной точки, относительно произвольного центра O , равна моменту равнодействующей силы, приложенной к точке, относительно того же центра:
.
Проектируя это векторное уравнение на оси координат, получаем три скалярных уравнения:
.
Если на точку действует несколько сил , то равнодействующая сила равна их геометрической сумме:
.
Тогда можно записать эту теорему так:
.
Далее будем считать, что точка O выбрана в начале координат. Тогда .
Центральная сила. Второй закон Кеплера
Пусть на точку действует центральная сила с центром в начале координат O . Тогда ее момент относительно O равен нулю. По теореме об изменении момента количества движения материальной точки имеем:
.
Если ввести секторную скорость , то она оказывается постоянной
.
Получаем второй закон Кеплера (закон площадей).
Второй закон Кеплера (закон площадей)
Под действием центральной силы точка движется по плоской кривой с постоянной секторной скоростью. То есть радиус-вектор точки заметает равные площади в любые равные промежутки времени.
Работа силы. Мощность
Основные понятия
Единицей измерения работы в СИ является 1 джоуль (1 Дж = 1 Н·м = кг·м 2 /с 2 ).
Работа силы при движении материальной точки от точки M 1 до точки M 2 равна сумме (интегралу) элементарных работ:
.
Если ввести скорость точки , то
.
Теорема о работе силы
Работа A равнодействующей силы на некотором перемещении равна алгебраической сумме работ Ak составляющих сил на том же перемещении:
.
Мощность – это величина работы, произведенная за единицу времени.
.
Единицей измерения мощности в СИ является 1 ватт (1 Вт = 1 Дж/с). Другие единицы мощности: 1 кВт (киловатт) = 1000 Вт; 1л.с.(лошадиная сила) = 736 Вт = 75 кгс·м/с.
Работа основных видов сил
Работа силы тяжести:
,
где P – сила тяжести, действующая на точку. Если начальная точка выше конечной, то работа положительна; если начальная точка ниже конечной, то отрицательна.
Работа силы упругости:
.
Здесь – деформация пружины в начальном положении; – в конечном.
Работа силы трения. Если сила трения постоянна, то
,
где s – длина пройденного точкой пути; – сила трения, которая всегда направлена в сторону, противоположную перемещению; f – коэффициент трения; N – нормальная реакция поверхности. Работа силы трения всегда отрицательна.
Работа силы тяготения.
На точку, находящуюся вблизи планеты Земля, на расстоянии r ≥ R от ее центра, действует сила притяжения
,
где R = 6371 км – радиус Земли. Тогда при перемещении точки из положения M1 в положение M2, сила тяготения совершит работу
.
Она не зависит от траектории движения тела.
Теорема об изменении кинетической энергии точки
Теорема об изменении кинетической энергии точки в дифференциальной форме
Дифференциал кинетической энергии точки равен сумма элементарных работ всех действующих на точку сил:
.
Проинтегрировав обе части этого уравнения вдоль траектории движения точки от положения M1 до M2, получим теорему в интегральной форме.
Теорема об изменении кинетической энергии точки
Изменение кинетической энергии материальной точки, при переходе ее из начального положения M1 в конечное положение M2, равно сумме работ всех сил, приложенных к точке на этом перемещении:
.
Силовые поля и потенциальная энергия
1. Работа сил стационарного поля при перемещении точки из положения M1 в положение M2 зависит только от начального положения M1, конечного положения M2, и формы траектории, но не зависит от закона движения точки.
2. Работа, совершенная полем при перемещении точки из положения M1 в M2 равна по модулю и обратна по величине работе, совершенной полем при перемещении точки из M2 в M1 при перемещении по той же траектории:
.
Для нестационарных полей эти свойства на выполняются.
Примеры стационарных полей: поле силы тяжести на поверхности Земли; электростатическое поле от неподвижно закрепленного заряда; поле силы упругости пружины, один конец которой закреплен.
Потенциальное силовое поле – это стационарное силовое поле, работа сил которого зависит только от начального M1 и конечного M2 положений точки, и не зависит от формы ее траектории. Потенциальное силовое поле также называют консервативным.
В потенциальном поле существует такая функция, через которую можно выразить вектор силы , действующей на точку.
Силовая функция – это функция, зависящая от координат точки ( x, y, z ) , через которую выражаются проекции силы потенциального поля на оси координат:
.
Отсюда следует, что сила не изменится, если к силовой функции прибавить постоянную. Таким образом, силовая функция определена с точностью до произвольной постоянной.
В потенциальном поле элементарная работа является дифференциалом от силовой функции:
.
Работа при конечном перемещении из точки в точку равна разности силовой функции в этих точках:
.
Таким образом, в потенциальном поле, работа сил поля не зависит от формы траектории. На замкнутом перемещении работа равна 0. Для более наглядной физической интерпретации, вводят понятие потенциальной энергии. Она равна, с точностью до произвольной постоянной, силовой функции, взятой с обратным знаком.
Потенциальная энергия П – это работа, которую нужно совершить при перемещении точки в потенциальном поле из данного положения в произвольным образом выбранное нулевое положение.
Так, для поля деформации, в качестве нулевого положения обычно принимают не деформированное положение; для гравитационного и электростатических полей за нулевое выбирают положение, бесконечно удаленное от тела или заряда. Для силы тяжести в поле Земли принимают любое, удобное для расчета положение. Таким образом, потенциальная энергия равна силовой функции, взятой с обратным знаком плюс постоянная, зависящая от выбора нулевого положения:
.
Пусть – нулевое положение. Тогда
;
.
Работа сил поля при перемещении системы из 1-го положения во 2-ое равна разности потенциальных энергий: .
Эквипотенциальные поверхности – это поверхности равного потенциала:
.
Сила направлена перпендикулярно эквипотенциальной поверхности.
Закон сохранения механической энергии
Если точка находится в потенциальном поле, то сумма ее кинетической и потенциальной энергий является постоянной:
.
Если на точку действуют несколько сил от разных потенциальных полей, то в качестве потенциальной энергии нужно взять сумму потенциальных энергий от каждого силового поля:
.
Основные виды потенциальных полей
В поле силы тяжести, потенциальная энергия зависит от высоты. Направив ось z вертикально вверх, получим: .
Поле силы упругости пружины. В этом поле, потенциальная энергия зависит от деформации λ пружины:
.
В качестве нулевого положения выбирают положение без деформации: λ = 0 .
Сила гравитационного притяжения и космические скорости
Между любыми двумя точками массами m 1 и m 2 , действует сила всемирного тяготения. Так, на точку 2 действует сила притяжения со стороны точки 1:
,
направленная вдоль прямой, проходящей через точку 1. Здесь r – расстояние между точками; Н·м 2 /кг 2 – гравитационная постоянная.
В результате притяжения, обе точки получают ускорения и движутся друг относительно друга. Мы рассмотрим более простой, но важный случай, когда масса M = m 1 одного из тел намного больше массы m = m 2 второго тела. Тогда точка с меньшей массой практически не оказывает влияния на движение более массивной точки. Выберем начало инерциальной системы координат в точке 1. Тогда силу гравитационного притяжения можно рассматривать как центральную силу и представить ее в векторном виде:
(П1) .
Потенциальная энергия точки 2:
(П2) .
Здесь нулевое положение выбрано на бесконечности: .
Формулы (П1) и (П2) справедливы, если объект 1 является шаром с плотностью, зависящей только от расстояния r до его центра. Пусть R – радиус такого шара. Тогда в формулах (П1) и (П2) r – это расстояние от центра шара 1 до точки 2. Они справедливы при .
Эти формулы можно использовать при расчете движения спутников вокруг Земли. Поскольку Земля вращается вокруг своей оси, то ее форма является эллипсоидом. Но в первом приближении Землю можно считать шаром радиуса R = 6371 км. Из таких допущений можно оценить космические скорости, необходимые для выведения летательных аппаратов на космические орбиты.
Первая космическая скорость – это скорость, которую необходимо сообщить телу на поверхности Земли, чтобы оно вышло на круговую орбиту. Она равна км/с. Если у тела первая космическая скорость, то оно может вращаться по круговой орбите, не падая на Землю, то есть стать ее спутником.
Вторая космическая скорость – это скорость, которую необходимо сообщить телу на поверхности Земли, чтобы оно вышло на параболическую орбиту. Она равна км/с. Если у тела скорость больше второй космической, то ее траекторией является гипербола, и, при отсутствии помех, оно будет удаляться от Земли и никогда не вернется назад.
Однако Солнце является той преградой, которая не даст спутнику со второй космической скоростью удалиться на бесконечное расстояние. Чтобы тело могло покинуть пределы солнечной системы, ему необходимо сообщить третью космическую скорость км/с.
Использованная литература:
А. А. Яблонский, Курс теоретической механики, часть II, динамика. Москва, «Высшая школа», 1966.
С. М. Тарг, Краткий курс теоретической механики, «Высшая школа», 2010.
Автор: Олег Одинцов . Опубликовано: 11-12-2019
Прямолинейное движение точки в теоретической механике
Содержание:
Основные виды прямолинейного движения точки:
Дифференциальное уравнение прямолинейного движения точки вдоль оси 

если рассматривается случай зависимости силы только от времени, координаты и скорости.
Начальные условия можно задать в форме  .
.
Наиболее важные случаи прямолинейного движения материальной точки получаются тогда, когда сила  постоянна или она зависит только от времени, или от координаты
постоянна или она зависит только от времени, или от координаты  , или от скорости
, или от скорости  . Если сила постоянна, имеем случай равнопеременного движения, т. е. движения с постоянным ускорением. От времени сила зависит обычно, когда ее изменяют путем регулирования, например регулируют силу тяги самолета изменением режима работы его двигателей.
. Если сила постоянна, имеем случай равнопеременного движения, т. е. движения с постоянным ускорением. От времени сила зависит обычно, когда ее изменяют путем регулирования, например регулируют силу тяги самолета изменением режима работы его двигателей.
Силу, зависящую от координаты  , могут создать сжатая или растянутая пружина и другие упругие тела при их деформации. Силы, зависящие от скорости движения,— это прежде всего силы сопротивления, когда материальная точка движется в какой-либо среде, например в воздухе, в воде и т. д.
, могут создать сжатая или растянутая пружина и другие упругие тела при их деформации. Силы, зависящие от скорости движения,— это прежде всего силы сопротивления, когда материальная точка движется в какой-либо среде, например в воздухе, в воде и т. д.
Отметим, что в перечисленных случаях интегрирование дифференциального уравнения (1Г) выполняется наиболее просто и его можно довести до конца в квадратурах. В более общем случае, если сила одновременно зависит от времени  , координаты
, координаты  и скорости
и скорости  , в большинстве случаев дифференциальное уравнение можно проинтегрировать лишь приближенно.
, в большинстве случаев дифференциальное уравнение можно проинтегрировать лишь приближенно.
Рассмотрим примеры на составление и интегрирование дифференциального уравнения прямолинейного движения точки. Эти примеры позволяют выявить некоторые особенности решения таких задач. Ниже приведены примеры, когда сила зависит только от времени, или от скорости, или от координаты.
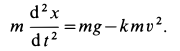
Пример 1. Точка массой  (рис. 8) падает вертикально вниз без начальной скорости под действием силы тяжести, испытывая силу сопротивления воздуха
(рис. 8) падает вертикально вниз без начальной скорости под действием силы тяжести, испытывая силу сопротивления воздуха  , значение которой пропорционально квадрату скорости и массе точки, т.е.
, значение которой пропорционально квадрату скорости и массе точки, т.е.  , где
, где  — постоянная положительная величина.
— постоянная положительная величина.
Найти уравнение движения точки.
Решение:
Направим ось  по вертикали вниз, выбрав за начало координат положение точки в момент начала движения. В этот же момент примем
по вертикали вниз, выбрав за начало координат положение точки в момент начала движения. В этот же момент примем  . В произвольный момент времени прикладываем к точке действующие на нее силы
. В произвольный момент времени прикладываем к точке действующие на нее силы  и
и  и составляем дифференциальное уравнение ее движения. Имеем
и составляем дифференциальное уравнение ее движения. Имеем
Скорость в этом случае можно определить в зависимости от времени или от координаты, используя подстановки
Последняя подстановка позволяет исключить из дифференциального уравнения время при определении скорости. Эта подстановка получается из первой умножением и одновременным делением на  :
:
Используя первую подстановку, получаем дифференциальное уравнение движения точки в следующем виде:

Разделяя переменные и беря интегралы от обеих частей, имеем
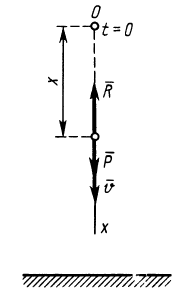
Рис. 8
Для того чтобы не искать дополнительно произвольную постоянную интегрирования, интегралы возьмем определенные, сохраняя верхний предел переменным для последующего интегрирования, а для нижних пределов используем также условие: при  . Выполняя интегрирование и подставляя пределы, получаем
. Выполняя интегрирование и подставляя пределы, получаем

Потенцируя и решая относительно  , имеем
, имеем

Переходя в (а) к пределу при  , стремящемся к бесконечности, получаем
, стремящемся к бесконечности, получаем

Для достижения предельной скорости требуется бесконечно большое время. Более подробные расчеты показывают, что скорость, близкая к предельной, устанавливается довольно быстро.
Отметим, что для свободного падения в воздухе парашютиста вблизи Земли без раскрытия парашюта предельная скорость равна  ; для авиационной бомбы она составляет
; для авиационной бомбы она составляет  .
.
Для нахождения закона движения точки подставляем в (а) вместо скорости  ее значение
ее значение  . Тогда
. Тогда

Интегрируя это уравнение после разделения переменных, имеем

Пример 2. Материальная точка массой  (рис. 9), брошенная вертикально вверх с поверхности Земли со скоростью
(рис. 9), брошенная вертикально вверх с поверхности Земли со скоростью  , движется под действием силы тяжести по закону тяготения Ньютона.
, движется под действием силы тяжести по закону тяготения Ньютона.
Определить зависимость скорости точки от ее расстояния до центра Земли, пренебрегая сопротивлением воздуха.
Решение:
Направив ось  по прямолинейной траектории точки, выберем начало координат в центре Земли. Тогда по закону Ньютона для силы тяготения имеем
по прямолинейной траектории точки, выберем начало координат в центре Земли. Тогда по закону Ньютона для силы тяготения имеем

Постоянный коэффициент  можно выразить через другие величины, в частности
можно выразить через другие величины, в частности  , где
, где  — масса Земли;
— масса Земли;  — универсальная постоянная тяготения. Для рассматриваемого случая удобнее
— универсальная постоянная тяготения. Для рассматриваемого случая удобнее  выразить из условия, что на поверхности Земли сила тяготения
выразить из условия, что на поверхности Земли сила тяготения  равна силе тяжести
равна силе тяжести  . Приравнивая
. Приравнивая  и
и  при
при  , получим
, получим

где  — ускорение силы тяжести у поверхности Земли;
— ускорение силы тяжести у поверхности Земли;  — радиус Земли. Подставляя полученное значение
— радиус Земли. Подставляя полученное значение  в выражение для силы тяготения, имеем
в выражение для силы тяготения, имеем
Составляем дифференциальное уравнение движения точки. Получаем
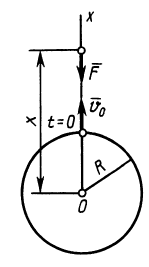
Рис. 9
Знак минус в правой части этого уравнения определяется знаком проекции силы  на ось
на ось  . Проекция силы отрицательна для положительных значений
. Проекция силы отрицательна для положительных значений  , рассматриваемых в этом примере.
, рассматриваемых в этом примере.
Исключая время из дифференциального уравнения подстановкой
Разделяя переменные и беря от обеих частей интегралы с учетом, что при  , имеем
, имеем
Для определения наибольшего расстояния  в зависимости от скорости
в зависимости от скорости  следует положить
следует положить  . Из последней формулы получим
. Из последней формулы получим

Видно, что увеличивается с ростом скорости и при  расстояние становится равным бесконечности. Это можно истолковать так, что точка, брошенная с Земли со скоростью , не возвратится на Землю. Приняв
расстояние становится равным бесконечности. Это можно истолковать так, что точка, брошенная с Земли со скоростью , не возвратится на Землю. Приняв  , получим
, получим

Скорость  называют второй космической скоростью. Это наименьшая скорость, которую должен иметь космический корабль для полета к другим планетам Солнечной системы.
называют второй космической скоростью. Это наименьшая скорость, которую должен иметь космический корабль для полета к другим планетам Солнечной системы.
Наименьшую скорость космического корабля, при которой он становится спутником Земли, называют первой космической скоростью. Она приблизительно равна  (см. ниже § 2 гл. 10).
(см. ниже § 2 гл. 10).
Пример 3. Материальная точка массой  (рис. 10) движется под действием силы притяжения
(рис. 10) движется под действием силы притяжения  к неподвижной точке
к неподвижной точке  . Эта сила пропорциональна массе точки и обратно пропорциональна кубу расстояния между точками. Коэффициент пропорциональности равен единице. В начальный момент
. Эта сила пропорциональна массе точки и обратно пропорциональна кубу расстояния между точками. Коэффициент пропорциональности равен единице. В начальный момент  начальное расстояние точки
начальное расстояние точки  и начальная скорость
и начальная скорость  .
.
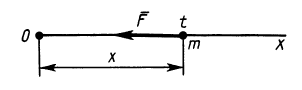
Рис. 10
Определить уравнение движения точки.
Решение:
Выбирая за начало координат точку  для силы
для силы  при положительном
при положительном  , имеем
, имеем

Учитывая направление силы  , составляем дифференциальное уравнение движения точки:
, составляем дифференциальное уравнение движения точки:
После преобразования левой части оно примет форму
Разделяя переменные и интегрируя это уравнение, имеем
После подстановки числовых значений для  и
и  получаем:
получаем:

Интегрируя полученное уравнение, имеем
Закон движения точки можно выразить в форме
Прямолинейное движение точки
Обычно в задачах по динамике рассматривают так называемые несвободные материальные точки —материальные точки, движение которых ограничивается различными связями.
Приступая к решению задач, в которых рассматривается несвободная материальная точка, нужно прежде всего выявить действующие на точку активные силы (движущие силы и силы сопротивления), а также реакции связей (пассивные силы).
Выявив действующие силы, необходимо определить, находятся они в равновесии или нет? Этот вопрос в зависимости от заданных условий решается двояко.
Если, например, известно, что точка движется равномерно и прямолинейно, значит система сил уравновешена; если же известно, что точка двигается неравномерно или имеет криволинейную траекторию, то система сил неуравновешена.
Если система сил задана (все силы системы известны), то, определив проекции сил на оси координат, можно установить равновесие или неравновесие системы. В случае когда суммы проекций всех сил на каждую из осей равны нулю, заданная система сил уравновешена; когда же сумма проекций всех сил хотя бы на одну из осей не равна нулю, система сил неуравновешена; в первом случае точка движется равномерно и прямолинейно, во втором случае— имеет ускорение (вторая задача динамики).
При решении различных технических задач особенно важное значение приобретает случай, когда на материальную точку действует неуравновешенная система сил. В подобных случаях целесообразно решать задачи, применяя так называемый метод кинетостатики или принцип Даламбера, который формулируется так: активные силы, реакции связей и сила инерции образуют уравновешенную систему сил.
Применяя принцип Даламбера, необходимо очень хорошо понимать Сущность силы инерции. Нужно помнить, во-первых, что сила инерции, численно равная произведению массы точки на приобретенное ускорение, всегда направлена в сторону, противоположную вектору ускорения;
- во-вторых, что сила инерции в действительности не приложена к рассматриваемой в задаче материальной точке; она условно прикладывается к этой точке; фактически сила инерции приложена к двигающему телу или к связи;
- в-третьих, что равновесие сил, которое образуется после добавления силы инерции к силам, приложенным к точке, — равновесие фиктивное; но оно позволяет воспользоваться для решения задачи уравнениями равновесия из статики.
При решении задач с помощью метода кинетостатики рекомендуется придерживаться такой последовательности:
- выделить точку, движение которой рассматривается, и изобразить ее на рисунке;
- выявить все активные силы и изобразить их приложенными к точке на рисунке;
- освободить точку от связей, заменить связи их реакциями и также изобразить их на рисунке;
- добавить к полученной системе сил силу инерции;
- рассмотреть образовавшуюся уравновешенную систему сил и в зависимости от вида системы сил выбрать наиболее рациональный способ решения: графический, графо-аналитический или аналитический (методом проекций).
Задача №1
На шнуре подвешена двухкилограммовая гиря (рис. 245, а). Каково при этом натяжение шнура? Как изменится натяжение шнура, если при его помощи поднимать гирю вертикально вверх равномерно? Поднимать вертикально вверх с ускорением  Опускать вертикально вниз с ускорением
Опускать вертикально вниз с ускорением
1. На гирю, которую принимаем за материальную точку массой m = 2кг, подвешенную на шнуре (см. рис. 245, а), действуют две силы: сила тяжести G и реакция нити Т, равная ее натяжению.
Других сил нет. Материальная точка (гиря) находится в покое, значит силы G и  образуют уравновешенную систему, т. е.
образуют уравновешенную систему, т. е.
2. Если гиря, подвешенная на шнуре, поднимается вертикально вверх равномерно, то на нее действуют те же две силы и они также образуют уравновешенную систему. Происходит лишь замена статического равновесия (равновесия в состоянии покоя) динамическим равновесием (равновесием в состоянии движения — равномерного и прямолинейного).
Таким образом, и в этом случае (см. рис. 245, а) натяжение шнура T = G= 19,62 я.
3. Рассмотрим гирю в состоянии равноускоренного движения вертикально вверх с ускорением  (рис. 245,6).
(рис. 245,6).
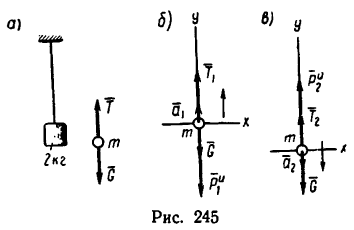
На гирю действуют также две силы: ее вес G и натяжение шнура  Теперь эти две силы не образуют уравновешенной системы, потому что точка движется с ускорением. Добавим к имеющимся силам G и
Теперь эти две силы не образуют уравновешенной системы, потому что точка движется с ускорением. Добавим к имеющимся силам G и  силу инерции
силу инерции  направив ее вертикально вниз —противоположно ускорению
направив ее вертикально вниз —противоположно ускорению 
Система сил G,  уравновешена, следовательно, алгебраическая сумма их проекций на вертикальную ось равна нулю (уравнение равновесия):
уравновешена, следовательно, алгебраическая сумма их проекций на вертикальную ось равна нулю (уравнение равновесия):

Из этого уравнения
поэтому
Как видно, при подъеме гири вверх с ускорением натяжение шнура увеличивается:

4- Рассмотрим гирю в состоянии равноускоренного движения вертикально вниз с ускорением  (рис. 245, в).
(рис. 245, в).
На гирю также действуют две силы: G и  и они так же, как и в предыдущем случае, не образуют уравновешенной системы.
и они так же, как и в предыдущем случае, не образуют уравновешенной системы.
Добавим силу инерции  направив ее противоположно ускорению
направив ее противоположно ускорению  т. е. вертикально вверх.
т. е. вертикально вверх.
Уравнение равновесия примет вид


При ускоренном движении гири вниз натяжение шнура ослабевает. В данном случае по сравнению с состоянием равновесия натяжение шнура уменьшается на 9 н.
Примечание. Если решение задачи выполнить в технической системе единиц (МКГСС), то вес гири G= 2 кГ, а сила инерции получит такое выражение
Тогда значение  приобретет такой вид
приобретет такой вид
 Легко проверить, что
Легко проверить, что 
Отмстим, что выражение натяжения шнура при равноускоренном движении гири вниз
Если ускорение  увеличивается, то может наступить такое состояние, когда
увеличивается, то может наступить такое состояние, когда  при этом
при этом
т. с. при свободном падении гири она не натягивает шнур. Образуется состояние «невесомости».
Задача №2
По наклонной плоскости АВ длиной 4 м и с углом подъема а=15 равноускоренно поднимают груз М весом G = 200 кГ, постоянной силой Р=65 кГ, направленной параллельно наклонной плоскости. Определить, сколько времени потребуется, чтобы переместить груз па расстояние AВ, сели коэффициент трения при движении груза по наклонной плоскости f= 0,05.
Решение — в единицах системы МКГСС.
1. Изобразим тело М на наклонной плоскости с приложенными к нему силами  и Р, а также силой трения F и нормальной реакцией
и Р, а также силой трения F и нормальной реакцией  наклонной плоскости (рис. 246).
наклонной плоскости (рис. 246).
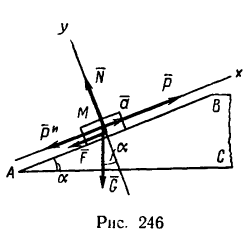
Находясь под действием этих сил, тело движется по наклонной плоскости с постоянным ускорением а.
2. Груз перемещается равноускоренно, без начальной скорости. Время его движения можно определить из уравнения движения

но предварительно необходимо определить ускорение а. Теперь система пяти сил  приложенные к нему, нс образуют уравновешенной системы. Приложим к грузу М силу инерции
приложенные к нему, нс образуют уравновешенной системы. Приложим к грузу М силу инерции  направив ее в сторону, противоположную ускорению а. Теперь система пяти сил
направив ее в сторону, противоположную ускорению а. Теперь система пяти сил 
 является уравновешенной.
является уравновешенной.
4. Выберем систему координат, как показано на рис. 238, и спроектируем все силы на оси х и у. Тогда получим два уравнения равновесия:

5. Из уравнения (1)

но сила трения
Нормальное давление найдем из уравнения (2):
поэтому
Подставим в это уравнение числовые значения 
6. Из выражения  найдем ускорение а:
найдем ускорение а:

7. Подставив значение ускорения а в выражение  найдем время перемещения груза М по всей длине наклонной плоскости:
найдем время перемещения груза М по всей длине наклонной плоскости:

Рекомендуется повторить решение последней задачи в единицах СИ, а затем самостоятельно решить следующие задачи.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Криволинейное движение материальной точки
- Движение несвободной материальной точки
- Относительное движение материальной точки
- Геометрия масс
- Кинематика сплошной среды
- Аксиомы классической механики
- Дифференциальные уравнения движения материальной точки
- Две основные задачи динамики точки
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Теоретическая механика:
Кинематика точки
Смотрите также решения задач по теме «Кинематика точки» в онлайн решебниках Яблонского, Мещерского, Чертова (с примерами и методичкой для заочников), Иродова и Савельева.
В этой главе в основном рассмотрены методы решения задач, в которых закон движения точки выражен так называемым естественным способом: уравнением s=f(t) по заданной траектории *.
* Решения задач, в которых закон движения задан координатным способом, рассмотрены в конце главы (§ 31).
В этом случае главными параметрами, характеризующими движение точки но заданной траектории, являются: s – расстояние от заданного начального положения и t – время.
Величина, характеризующая в каждый данный момент времени направление и быстроту движения точки, называется скоростью (v на рис. 192). Вектор скорости всегда направлен вдоль касательной в ту сторону, куда движется точка. Числовое значение скорости в любой момент времени выражается производной от расстояния по времени:
v = ds/dt или v = f'(t).
Ускорение a точки в каждый данный момент времени характеризует быстроту изменения скорости. При этом нужно отчетливо понимать, что скорость – вектор, и, следовательно, изменение скорости может происходить по двум признакам: по числовой величине (по модулю) и по направлению.
Быстрота изменения модуля скорости характеризуется касательным (тангенсальным) ускорением at – составляющей полного ускорения a, направленной по касательной к траектории (см. рис. 192).
Числовое значение касательного ускорения в общем случае определяется по формуле
at = dv/dt или at = f»(t).
Быстрота изменения направления скорости характеризуется центростремительным (нормальным) ускорением an – составляющей полного ускорения a, направленного по нормали к траектории в сторону центра кривизны (см. рис. 192).
Числовое значение нормального ускорения определяется в общем случае по формуле
an = v 2 /R,
где v – модуль скорости точки в данный момент;
R – радиус кривизны траектории в месте, где находится точка в данный момент.
После того как определены касательное и нормальное ускорения, легко определить и ускорение a ( полное ускорение точки ).
Так как касательная и нормаль взаимно перпендикулярны, то числовое значение ускорения а можно определить при помощи теоремы Пифагора:
a = sqrt(at 2 + an 2 ).
Направление вектора a можно определить, исходя из тригонометрических соотношений, по одной из следующих формул:
sin α = an/a; cos α = at/a; tg α = an/at.
Но можно сначала определить направление полного ускорения a использовав формулу tg α = an/at,
а затем найти числовое значение a:
a = an/sin α или a = at/cos α.
Касательное и нормальное ускорения точки являются главными кинематическими величинами, определяющими вид и особенности движения точки.
Наличие касательного ускорения (at≠0) или его отсутствие (at=0) определяют соответственно неравномерность или равномерность движения точки.
Наличие нормального ускорения (an≠0) или его отсутствие (an=0) определяют криволинейность или прямолинейность движения точки.
Движение точки можно классифицировать так:
а) равномерное прямолинейное (at = 0 и an = 0);
б) равномерное криволинейное (at = 0 и an ≠ 0);
в) неравномерное прямолинейное (at ≠ 0 и an = 0);
г) неравномерное криволинейное (at ≠ 0 и an ≠ 0).
Таким образом, движение точки классифицируется по двум признакам: по степени неравномерности движения и по виду траектории.
Степень неравномерности движения точки задана уравнением s=f(t), а вид траектории задается непосредственно.
§ 27. Равномерное прямолинейное движение точки
Если at=0 и an=0, то вектор скорости остается постоянным (v=const), т. е. не изменяется ни по модулю, ни по направлению. Такое движение называется равномерным прямолинейным .
Уравнение равномерного движения имеет вид
(а) s = s0 + vt
или в частном случае, когда начальное расстояние s0=0,
(б) s = vt.
В уравнение (а) входит всего четыре величины, из них две переменные: s и t и две постоянные: s0 и v. Поэтому в условии задачи на равномерное и прямолинейное движение точки должны быть заданы три любые величины.
При решении задач необходимо выяснить все заданные величины и привести их к одной системе единиц. При этом нужно заметить, что как в системе МКГСС (технической), так и в СИ единицы всех кинематических величин одинаковы: расстояние s измеряется в м, время t – в сек, скорость v – в м/сек.
§ 28. Равномерное криволинейное движение точки
Если at = 0 и an ≠ 0, то модуль скорости остается неизменным (точка движется равномерно), но ее направление изменяется и точка движется криволинейно. Иначе, при равномерном движении по криволинейной траектории точка имеет нормальное ускорение, направленное по нормали к траектории и численно равное
an = v 2 /R,
где R – радиус кривизны траектории.
В частном случае движения точки по окружности (или по дуге окружности) радиус кривизны траектории во всех ее точках постоянный:
R = r = const,
а так как и числовое значение скорости постоянно, то
an = v 2 /r = const.
При равномерном движении числовое значение скорости определяется из формулы
v = (s — s0)/t или v = s/t.
Если точка совершит полный пробег по окружности, то путь s равен длине окружности, т. е. s = 2πr = πd (d = 2r – диаметр), а время равно периоду, т. е. t = T. Выражение скорости примет вид
v = 2πr/T = πd/T.
§ 29. Равнопеременное движение точки
Если вектор at=const (касательное ускорение постоянно как по модулю, так и по направлению), то an=0. Такое движение называется равнопеременным и прямолинейным .
Если же постоянным остается только числовое значение касательного уравнения
at = dv/dt = f'(t) = const,
то an≠0 и такое движение точки называется равнопеременным криволинейным .
При |at|>0 движение точки называется равноускоренным , а при |at| равнозамедленным .
Уравнение равнопеременного движения независимо от его траектории имеет вид
(1) s = s0 + v0t + att 2 / 2.
Здесь s0 – расстояние точки от исходного положения в момент начала отсчета; v0 – начальная скорость и at – касательное ускорение – величины численно постоянные, a s и t – переменные.
Числовое значение скорости точки в любой момент времени определяется из уравнения
(2) v = v0 + att.
Уравнения (1) и (2) являются основными формулами равнопеременного движения и они содержат шесть различных величин: три постоянные: s0, v0, at и три переменные: s, v, t.
Следовательно, для решения задачи на равнопеременное движение точки в ее условии должно быть дано не менее четырех величин (систему двух уравнений можно решить лишь в том случае, если они содержат два неизвестных).
Если неизвестные входят в оба основных уравнения, например, неизвестны at и t, то для удобства решения таких задач выведены вспомогательные формулы:
после исключения at из (1) и (2)
(3) s = s0 + (v + v0)t / 2;
после исключения t из (1) и (2)
(4) s = s0 + (v 2 — v0 2 ) / (2at).
В частном случае, когда начальные величины s0=0 и v0=0 (равноускоренное движение из состояния покоя), то получаем те же формулы в упрощенном виде:
(5) s = att 2 / 2;
(6) v = att;
(7) s = vt / 2;
(8) s = v 2 / (2at).
Уравнения (5) и (6) являются основными, а уравнения (7) и (8) – вспомогательными.
Равноускоренное движение из состояния покоя, происходящее под действием только силы тяжести, называется свободным падением . К этому движению применимы формулы (5)–(8), причем
at = g = 9,81 м/сек 2 ≈ 9,8 м/сек 2 .
§ 30. Неравномерное движение точки по любой траектории
§ 31. Определение траектории, скорости и ускорения точки, если закон ее движения задан в координатной форме
Если точка движется относительно некоторой системы координат, то координаты точки изменяются с течением времени. Уравнения, выражающие функциональные зависимости координат движущейся точки от времени, называют уравнениями движения точки в системе координат (см. § 51, п. 2 в учебнике Е. М. Никитина).
Движение точки в пространстве задается тремя уравнениями:
x = f1(t);
(1) y = f2(t);
z = f3(t);
Движение точки в плоскости (рис. 203) задается двумя уравнениями:
(2) x = f1(t);
y = f2(t);
Системы уравнений (1) или (2) называют законом движения точки в координатной форме .
Ниже рассматривается движение точки в плоскости, поэтому используется только система (2).
Если закон движения точки задан в координатной форме, то:
а) траектория плоского движения точки выражается уравнением
y = F(x),
которое образуется из данных уравнений движения после исключения времени t;
б) числовое значение скорости точки находится из формулы
v = sqrt(vx 2 + vy 2 )
после предварительного определения проекции (см. рис. 203) скорости на оси координат
vx = dx/dt и vy = dy/dt;
в) числовое значение ускорения находится из формулы
a = sqrt(ax 2 + ay 2 )
после предварительного определения проекций ускорения на оси координат
ax = dvx/dt и ay = dvy/dt;
г) направления скорости и ускорения относительно осей координат определяются из тригонометрических соотношений между векторами скорости или ускорения и их проекциями.
§ 32. Кинематический способ определения радиуса кривизны траектории
При решении многих технических задач возникает необходимость знать радиус кривизны R (или 1/R – кривизну ) траектории. Если задано уравнение траектории, то радиус ее кривизны в любой точке можно определить при помощи дифференциального исчисления. Используя уравнения движения точки в координатной форме, можно определять радиус кривизны траектории движущейся точки без непосредственного исследования уравнения траектории. Определение радиуса кривизны траектории при помощи уравнений движения точки в координатной форме называется кинематическим способом. Этот способ основан на том, что радиус кривизны траектории движущейся точки входит в формулу
an = v 2 /R,
выражающую числовое значение нормального ускорения.
Скорость v точки определяется по формуле
(б) v = sqrt(vx 2 + vy 2 ).
Числовое значение нормального ускорения an входит в выражение полного ускорения точки
a = sqrt(an 2 + at 2 ),
откуда
(в) an = sqrt(a 2 — at 2 ),
где квадрат полного ускорения
(г) a 2 = ax 2 + ay 2
и касательное ускорение
(д) at = dv/dt.
Таким образом, если закон движения точки задан уравнениями
x = f1(t);
y = f2(t),
то при определении радиуса кривизны траектории рекомендуется произвести следующее:
1. Продифференцировав уравнения движения, найти выражения проекций на оси координат вектора скорости:
vx = f1‘(t);
vy = f2‘(t).
2. Подставив в (б’) выражения vx и vy, найти v 2 .
3. Продифференцировав по t уравнение (б), полученное непосредственно из (б’), найти касательное ускорение at, а затем at 2 .
4. Продифференцировав вторично уравнения движения, найти выражения проекций на оси координат вектора ускорения
ax = f1»(t) = vx‘;
ay = f2»(t) = vy‘.
5. Подставив в (г) выражения ax и ay, найти a 2 .
6. Подставить в (в) значения a 2 и at 2 и найти an.
7. Подставив в (а) найденные значения v 2 и an, получить радиус кривизны R.
http://www.evkova.org/pryamolinejnoe-dvizhenie-tochki-v-teoreticheskoj-mehanike
http://exir.ru/termeh/kinematika_tochki.htm