Глава 2. Цифровые системы управления
2.1. Дискретные сигналы и их z-преобразование.
 |
Ниже на рис. 2.1.1 приведена функциональная схема одноконтурной цифровой системы управления. Компьютер в этой системе по определенной программе обрабатывает представленную в цифровой форме информацию и выдает на выходе сигнал также в цифровой форме. Программа может быть написана так, что качество системы в целом будет равно или очень близко к заданному. Многие компьютеры способны принимать и обрабатывать несколько входных сигналов, поэтому цифровые системы управления часто бывают многомерными.
Компьютер получает и обрабатывает сигнал в цифровом (численном) дискретном виде, а не в виде непрерывной переменной. В цифровой системе управления обязательно присутствует компьютер, входной и выходной сигнал которого представлены в виде числового кода. Преобразование непрерывного сигнала в цифровую форму осуществляет аналого-цифровой преобразователь (АЦП). Выходной сигнал компьютера (цифровой) преобразуется в непрерывную форму с помощью цифро-аналогового преобразователя (ЦАП). В результате любой непрерывный сигнал x(t) будет представляет собой последовательность дискретных значений x(kDt), где k = 0, 1, 2 целые числа.
Данные, получаемые о переменных системы только в дискретные моменты времени и обозначаемые как x(kDt), называются квантованными данными или дискретным сигналом.
Любое устройство, преобразующее непрерывный сигнал в дискретный, можно рассматривать как квантователь или ключ, который замыкается каждые Dt секунд на бесконечно малый отрезок времени. Рассмотрим идеальный квантователь, изображенный на рис. 2.1.2. Его входной сигнал обозначен как x(t) а выходной – x * (t) = = x(kDt) d(t – kDt), где kDt есть текущий момент замыкания, а d(t) – единичная импульсная дельта-функция (Дирака).
 |
Предположим, что мы квантуем сигнал x(t), как показано на рис. 2.1.3, и получаем x * (t). Тогда дискретный сигнал x * (t) можно представить в виде последовательности импульсов (условно обозначенных вертикальными стрелками), начинающихся при t = 0, разделенных интервалами в Dt секунд и имеющих амплитуды x(kDt).
 |
Цифроаналоговый преобразователь – это устройство, которое преобразует дискретный сигнал x * (t) в непрерывный сигнал p(t). Обычно его можно представить в виде фиксатора (экстраполятора нулевого порядка, ЭПО), как показано на рис. 2.1.4.
 |
Экстраполятор воспринимает значение x(kDt) и сохраняет его постоянным на интервале kDt * (t) идеального квантователя представляет собой последовательность импульсов с амплитудами x(kDt)
 . (2.1.2)
. (2.1.2)
Преобразовав (2.6.2) по Лапласу (см. 1.3.1 стр. 19), получим
 . (2.1.3)
. (2.1.3)
Это выражение представляет собой бесконечный ряд по степеням члена e s D t . Введем переменную z = e s D t , возможно определить новое преобразование, называемое z-преобразованием
 . (2.1.4)
. (2.1.4)
Пример 2.6.1. Найдем z-преобразование единичной ступенчатой функции Xевисайда q(t)
 . (2.1.5)
. (2.1.5)
В общем случае z-преобразование функции f(t) определяется как
 . (2.1.6)
. (2.1.6)
Таблица 2.1.1 содержит z-преобразования часто встречающихся функций, а таблица 2.1.2 – его свойства. С более полной таблицей 2.1.1 можно познакомиться на сайте MCS.
| x(t) | X(s) | X(z) |
| Ступенчатая функция Хевисайда, q (t) | 1/s | z / (z–1) |
| Импульсная функция Дирака d(t) | ||
| d(t–kDt) | exp(–kDt) | z — k |
t  | 1/s 2 | Dt z / (z–1) 2 |
| exp(– at) | 1/(s + a) | z / [z–exp(–aDt)] |
| 1 – exp(– at) | 1/s(s + a) | z [1– exp(–aDt)] / (z-1)[z–exp(–aDt)] |
| sin(w t) | w /(s 2 + w 2 ) | z sin(wDt) / [z 2 –2zcos(wDt)+1] |
| cos(w t) | s /(s 2 + w 2 ) | z [z –cos(wDt)] / [z 2 –2zcos(wDt)+1] |
| exp(-at) sin(w t) | w /[(s 2 + a 2 ) + w 2 ] | z exp(–aDt)sin(wDt) / [z 2 –2z exp(–aDt)* *cos(wDt)+exp(–2aDt)] |
| exp(-at) cos(w t) | (s + a)/[(s 2 + a 2 ) + w 2 ] | z 2 – z exp(–aDt)* *cos(wDt)/ [z 2 –2z exp(–aDt)* *cos(wDt)+exp(–2aDt)] |
| x(t) | |
| 1. k x(t) | k X(z) |
| 2. x1(t) + x2(t) | X1(z) + X2(z) |
| 3. x(t+Dt) | z X(z) – z x(0) |
| 4. t x(t) | –Dt z d X(z) / dz |
| 5. exp(–at) x(t) | X[z exp(at)] |
| 6. x(0), начальное значение | lim X(z) при z ® ¥ |
| 7. x(¥), конечное значение | lim(z–1)X(z) при z ® 1, если все полюсы (z–1)X(z) находятся внутри единичной окруж-ности êz ê= 1 на z-плоскости |
Передаточная функция разомкнутой дискретной системы.
Передаточная функция разомкнутой дискретной системы в z-области определяется по z-преобразованиям входного X(z) и выходного Y(z) сигналов
 . (2.1.7)
. (2.1.7)
Пример 2.1.2. Пусть разомкнутая дискретная система состоит из последовательно соединенных экстраполятора нулевого порядка (см. рис. 2.1.4) с передаточной функцией G0(s) (см. 2.1.1) и ТО с передаточной функцией GТO(s) = 1/ s (s+1), как показано на рис. 2.1.7.
 |
Требуется найти отклик системы на единичный импульсный входной сигнал x(t) = d(t) (функцию Дирака) при Dt = 1 c.
Передаточная функция по Лапласу данной системы равна
Выбирая из таблицы 2.1.1 z-преобразование для каждого из слагаемых (2.1.8), получим
=  =
=
=  .
.
Поскольку Dt = 1, то
G(z) =  . (2.1.10)
. (2.1.10)
Так, как X(z) = 1, то Y(z) = G(z). Поделим числитель (2.1.10) на его знаменатель
Таким образом, на выходе системы в дискретные моменты времени (раз в секунду) будут появляться следующие значения:
Передаточная функция замкнутой дискретной системы.
На рис. 2.1.8 показана замкнутая схема рассмотренной ранее разомкнутой цифровой системы (показаны некие условные ключи, работающие синхронно с экстраполятором).
 |
Передаточная функция такой системы равна
П(z) =  . (2.1.12)
. (2.1.12)
Пример 2.1.3. Пусть передаточная функция G(z) рассмотренной на рис. 2.1.8 замкнутой дискретной системы описывается выражением (2.1.10), как в примере 2.1.2. Требуется найти передаточную функцию П(z) замкнутой дискретной системы, а также – ее переходную характеристику, т.е. реакцию на единичную ступеньку x(t) = q(t) (функцию Хевисайда).
Подставляя (2.1.10) в (2.1.12), найдем
П(z) = . (2.1.13)
Так как z-преобразования функции Хевисайда равно X(z) = = z/(z–1), то
 .
.
Произведя деление числителя на знаменатель по алгоритму, рассмотренному в примере 2.1.3, получим
Таким образом, на выходе замкнутой системы в дискретные моменты времени (раз в секунду) будут появляться следующие значения:
2.2. Анализ устойчивости дискретных систем.
Линейная непрерывная система с обратной связью устойчива, если все полюсы ее передаточной функции П(s) расположены в левой половине s-плоскости (см. рис. 1.3.1 на стр. 21).
Z-плоскость и s-плоскость связаны преобразованием
Отсюда следует, что
В левой половине s-плоскости s 2 –[1,3678–0,3678K]z +0,3678+0,2644K = 0.
При K = 1 получим
Так как оба корня расположены внутри единичной окружности, то система устойчива.
и система неустойчива.
Дискретная система второго порядка может стать неустойчивой при увеличении коэффициента усиления, тогда как непрерывная система второго порядка устойчива при любых значениях коэффициента усиления, если оба ее полюса находятся в левой половине s-плоскости.
2.3. Реализация цифровых регуляторов.
Рассмотрим непрерывный ПИД-регулятор с передаточной функцией (см. 1.6.6 стр. 42)
 . (2.3.1)
. (2.3.1)
Цифровую реализацию этого регулятора можно получить, если использовать дискретную аппроксимацию операций дифференцирования и интегрирования. Для производной по времени воспользуемся правилом правой разности (см. 1.2.5 стр. 17)
 . (2.3.2)
. (2.3.2)
Применив к (2.3.2) z-преобразование, получим
 . (2.3.3)
. (2.3.3)
Операцию интегрирования аппроксимируем с помощью формулы прямоугольников
 , (2.3.4)
, (2.3.4)
где u(kDt) – выход интегратора в момент t = kDt. Применив к (2.3.4) z-преобразование, получим
 , или
, или  . (2.3.5)
. (2.3.5)
Таким образом, передаточная функция цифрового ПИД- регулятора имеет вид
 . (2.3.6)
. (2.3.6)
Применим к (2.3.6) обратное z-преобразование и получим разностное уравнение, описывающее алгоритм работы цифрового ПИД-регулятора
u(k) = K1 e(k) + K2 [u(k–1) + Dt e(k)] +  [e(k) – e(k–1)] =
[e(k) – e(k–1)] =
= K2 u(k–1) + [K1 + K2 Dt + ] e(k) – e(k–1). (2.3.7)
Вычисление по уравнению (2.3.7) легко выполнить с помощью компьютера.
2.4. Модели систем в переменных состояния.
Широкое применение цифровых компьютеров побуждает рассматривать и описывать системы управления во временной области. Соответствующие методы являются более мощными по сравнению с рассмотренным выше методом преобразования Лапласа для анализа линейных систем управления с постоянными параметрами, т.к. могут быть применены к нелинейным, нестационарным и многомерным системам. Нестационарная система управления – это система, в которой один или более параметров являются функциями времени.
Переменные состояния динамической системы.
Предположим, что система управления описывается дифференциальным уравнением второго порядка
Выберем в качестве переменных состояния координату y(t) и скорость ее изменения dy(t)/dt. Введем обозначения этих переменных
Тогда вместо дифференциального уравнения (2.1.1) второго порядка можно рассматривать систему дифференциальных уравнений первого порядка
Эти уравнения описывают поведение системы в терминах скорости изменения каждой переменной состояния. Более того, переменные состояния описывают поведение системы в будущем, если известны текущие состояния, внешние воздействия и уравнения динамики системы.
В общем случае состояние системы описывается дифференциальными уравнениями первого порядка относительно каждой из переменных состояния
где x¢ = dx(t)/dt. Эту же систему дифференциальных уравнений можно записать в матричной форме
 ,
,
или более компактном виде
 , (2.4.4)
, (2.4.4)
используя векторы-столбцы x и u, а также матрицы A = [anm] и B = [bnm].
В общем случае выходные сигналы линейной системы связаны с переменными состояния и входными сигналами уравнением вида
y = Cx + Du, (2.4.5)
где y – совокупность выходных сигналов, представленных вектором-столбцом.
Пример 2.4.1. Запишем уравнение состояния для RLC цепи, изображенной на рис. 2.4.1.
 |
Введем обозначения переменных состояния x1 = uC , а x2 = iL. Тогда, на основании уравнений Кирхгофа для токов, получим
dx1(t) /dt = 0 x1(t) –  x2(t) + u(t), (2.4.5)
x2(t) + u(t), (2.4.5)
dx2(t) /dt =  x1(t) –
x1(t) –  x2(t).
x2(t).
Выходной сигнал равен
Таким образом, уравнение состояния в векторной форме имеет вид
 , y(t) = [0 R] x(t). (2.4.7)
, y(t) = [0 R] x(t). (2.4.7)
2. Математическое описание систем автоматического управления
Публикую первую часть второй главы лекций по теории автоматического управления.
В данной статье рассматриваются:
2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
2.2. Линеаризация уравнений динамики САУ (САР)
2.3. Классический способ решения уравнений динамики
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.

2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
При составлении уравнений, описывающих нестационарные процессы в САУ (САР) и которые в дальнейшем будем называть уравнениями динамики, система “разбивается” на отдельные элементы (звенья), для каждого из которых не существует проблем в записи соответствующего уравнения динамики.
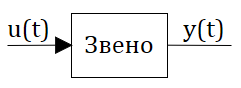
На рис. 2.1.1 представлено схематичное представление САУ (звена) в переменных «вход-выход», где x(t) (или u(t)) — входное воздействие, а y(t) — выходное воздействие, соответственно. Нередко входное воздействие будет называться управляющим, а выходное воздействие — регулируемой величиной (переменной).

При составлении уравнений динамики используются фундаментальные законы сохранения из разделов “Механики”, “Физики”, “Химии” и др.
Например, при описании перемещения узла какого-то механизма силового привода используются законы сохранения: момента, энергии, импульса и др… В теплофизических (теплогидравлических) системах используются фундаментальные законы сохранения: массы (уравнение неразрывности), импульса (уравнение движения), энергии (уравнение энергии) и др
Уравнения сохранения в общем случае содержат постоянные и нестационарные члены, причем при отбрасывании нестационарных членов получают так называемые уравнения статики, которые соответствуют уравнениям равновесного состояния САУ (звена). Вычитанием из полных уравнений сохранения стационарных уравнений получают нестационарные уравнения САУ в отклонениях (от стационара).

где:  — стационарные значения входного и выходного воздействий;
— стационарные значения входного и выходного воздействий;
 — отклонения от станционара, соотвесвенно.
— отклонения от станционара, соотвесвенно.
В качестве примера рассмотрим «технологию» получения уравнений динамики для механического демпфера, схематическое изображение которого представлено на рис. 2.1.2.

Согласно 2-му закону Ньютона, ускорение тела пропорционально сумме сил, действующих на тело:

где, m — масса тела, Fj — все силы воздействующие на тело (поршень демпфера)
Подставляя в уравнение (2.1.1) все силы согласно рис. 2.2, имеем:

где  — сила тяжести;
— сила тяжести;  — сила сопротивления пружины,
— сила сопротивления пружины,  — сила вязконо трения (пропорциональна скорости поршеня)
— сила вязконо трения (пропорциональна скорости поршеня)
Размерности сил и коэффициентов, входящих в уравнение (2.1.2):

Предполагая, что при t ≤ 0 поршень демпфера находился в равновесии, то есть

перейдем к отклонениям от стационарного состояния:
Пусть при t>0  . Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:
. Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:

если  , то уравнение принимает вид:
, то уравнение принимает вид:


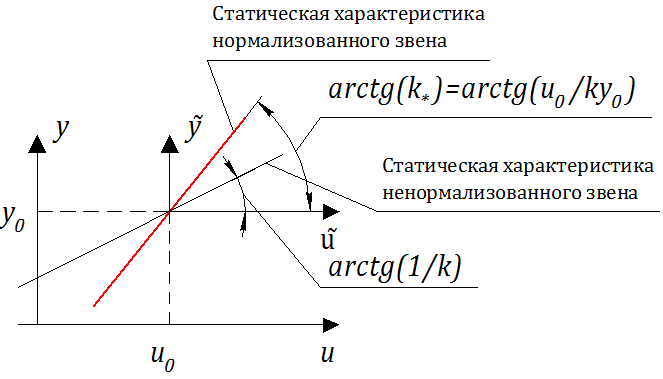
Соотношение (2.1.4) – уравнение звена (демпфера) в равновесном (стационарном) состоянии, а соотношение (2.1.5) – статическая характеристика звена – демпфера (см. рисунок 2.1.3).

Вычитая из уравнения (2.1.3) уравнение (2.1.4), получаем уравнение динамики демпфера в отклонениях:

тогда, разделив на k, имеем:


Уравнение (2.1.6) — это уравнение динамики в канонической форме, т.е. коэффициент при Δy(t) равен 1.0!
«Легко» видеть, что коэффициенты перед членами, содержащими производные, имеют смысл (и размерность!) постоянных времени. В самом деле:


Таким образом, получаем, что:
— коэффициент перед первой производной имеет размерность [c] т.е. смысл некоторой постоянной времени;
— коэффициент перед второй производной: [ ];
];
— коэффициент в правой части ( ): [
): [ ].
].
Тогда уравнение (2.1.6) можно записать в операторной форме:
 , что эквивалентно
, что эквивалентно

где:  — оператор диффренцирования;
— оператор диффренцирования;
 -линейный дифференциальный оператор;
-линейный дифференциальный оператор; 
 — линейный дифференциальный оператор, вырожденный в константу, равную .
— линейный дифференциальный оператор, вырожденный в константу, равную .
Анализ уравнения (2.1.6.а) показывает, что такое уравнение имеет размерные переменные, а также размерными являются все коэффициенты уравнения. Это не всегда удобно. Кроме того, если реальная САР (САУ) состоит из многих звеньев, выходными воздействиями которых являются различные физические переменные (скорость, температура, нейтронный поток, тепловой поток и т.д.), то значения коэффициентов могут различаться на большое число порядков, что ставит серьезные математические проблемы при численном решении уравнений динамики на компьютере (поскольку числа в компьютере всегда представляются с какой-то точностью). Одним из наилучших способов избежать численных трудностей является принцип нормализации, т.е. переход к безразмерным отклонениям, которые получены нормированием отклонения на стационарное значение соответствующей переменной.
Введем новые нормированные (безразмерные) переменные:

Подставляя эти соотношения в уравнение (2.1.2), имеем:


Поддчеркнутые члены выражения в сумме дают 0 (см. 2.1.4) Перенося в левую часть члены, содержащие  , и, разделив на
, и, разделив на  , получаем:
, получаем:


где:  — коэффициент усиления, причем безразмерный.
— коэффициент усиления, причем безразмерный.
Проверим размерность коэффициента 

Использованный выше «технический» прием позволяет перейти к безразмерным переменным, а также привести вид коэффициентов в уравнении динамики к легко интерпретируемому виду, т.е. к постоянным времени (в соответствующей степени) или к безразмерным коэффициентам усиления.
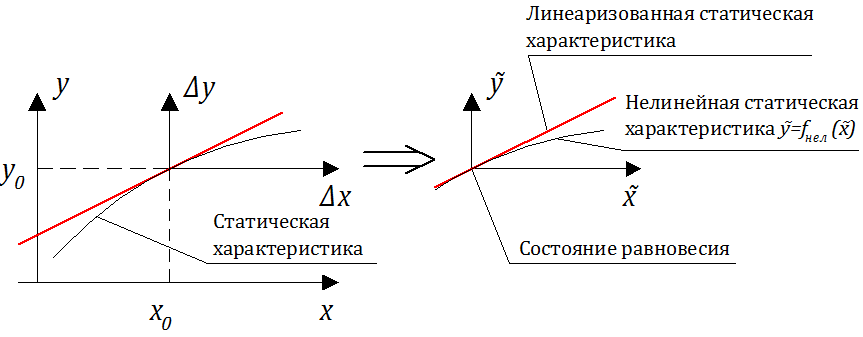
На рис. 2.1.4 представлены статические характеристики для механического демпфера:
Процедура нормировки отклонений позволяет привести уравнения динамики к виду:

где  дифференциальные операторы.
дифференциальные операторы.
Если дифференциальные операторы — линейные, а статическая характеристика САУ (звена) – тоже линейна, то выражение (2.1.8) соответствует линейному обыкновенному дифференциальному уравнению (ОДУ).
А если – нелинейные дифференциальные операторы, или  , то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
, то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
Пример создания модели демпфера можно посмотереть здесь: «Технология получения уравнений динамики ТАУ»
2.2. Линеаризация уравнений динамики САУ (САР)
Практически все реальные системы автоматического управления (САУ) являются нелинейными, причем нелинейность САУ может определяться различными причинами:
- Нелинейностью статической характеристики.
- Нелинейностью динамических членов в уравнениях динамики.
- Наличием в САУ принципиально нелинейных звеньев.
Если в замкнутой САУ (САР) нет принципиально нелинейных звеньев, то в большинстве случаев уравнения динамики звеньев, входящих в систему, могут быть линеаризованы. Линеаризация основана на том, что в процессе регулирования (т.е. САУ с обратной связью) все регулируемые величины мало отклоняются от их программных значений (иначе система регулирования или управления не выполняла бы своей задачи).
Например, если рассмотреть управление мощностью энергетического ядерного реактора, то главная задача САР — поддержание мощности на заданном (номинальном) уровне мощности. Существующие возмущения (внутренние и внешние) “отрабатываются” САР и поэтому параметры ядерного реактора незначительно отличаются от стационарных. На рис. 2.2.1 представлена временная зависимость мощности ядерного реактора, где нормированные отклонения мощности ΔN /N0 Рис. 2.2.1 – Пример изменения мощности реактора
Рассмотрим некоторое звено (или САР в целом), описание динамики которого можно представить в переменных “вход-выход”:
Предположим, что динамика данного звена описывается обыкновенным дифференциальным уравнением n-го порядка:

Перенесем  в левую часть уравнения и запишем уравнение в виде%
в левую часть уравнения и запишем уравнение в виде%

где  -– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
-– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
Будем считать, что при t ≤ 0 САУ (звено) находилось в равновесии (в стационарном состоянии). Тогда уравнение (2.2.2) вырождается в уравнение статической характеристики:

Разложим левую часть уравнения (2.2.2) в ряд Тейлора в малой окрестности точки равновесного состояния  .
.
Напомним, что разложение в ряд Тейлора трактуется следующим образом: если  , то «простое» разложение функции в ряд Тейлора в окрестности точки
, то «простое» разложение функции в ряд Тейлора в окрестности точки  будет выглядеть так:
будет выглядеть так:

C учетом вышеприведенного разложение принимает вид:

Предполагая, что отклонения выходных и входных воздействий незначительны, (т.е.: ), оставим в разложении только члены первого порядка малости (линейные). Поскольку
), оставим в разложении только члены первого порядка малости (линейные). Поскольку  , получаем:
, получаем:

Подставляя соотношение (2.2.4) в уравнение (2.2.2), и перенося множители при у и u в разные части получаем уравнения:


Коэффициенты  — постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
— постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
В дальнейшем нами будет часто использоваться операторная форма записи уравнений динамики:

где  – оператор дифференцирования;
– оператор дифференцирования;
— линейный дифференциальный оператор степени n;
— линейный дифференциальный оператор степени m, причем обычно порядок оператора выше порядка оператора : 
Уравнения (2.2.5) и (2.2.6) — уравнения динамики системы (звена) в отклонениях.
Если исходное уравнение (2.2.1) — дифференциальное уравнение в физических переменных (температура, скорость, поток и т.д.), то размерность коэффициентов может быть произвольной (любой).
Переход к нормализованным отклонениям позволяет “упорядочить” размерность коэффициентов. В самом деле, разделив уравнение (2.2.5) на начальные условия (значения в нулевой момент времени) и выполнив некоторые преобразования, получаем:

Приведение уравнения динамики САУ (звена) к нормализованному виду позволяет “унифицировать” размерность коэффициентов уравнений: ==>

Если вынести в правой части (2.2.7) коэффициент  за общую скобку и разделить все уравнение на
за общую скобку и разделить все уравнение на  , то уравнение принимает вид:
, то уравнение принимает вид:


или в операторном виде:

Линеаризация уравнений динамики и нормализация переменных позволяют привести уравнения динамики САУ (звена) к виду, наиболее удобному для использования классических методов анализа, т.е. к нулевым начальным условиям.

Пример
Выполнить линеаризацию уравнения динамики некоторой «абстрактной» САР в окрестности состояния (x0, y0), если полное уравнение динамики имеет вид:

Нелинейность полного уравнения динамики проявляется в следующем:
• во-первых, в нелинейности статической характеристики:

• во-вторых, слагаемое в левой части  — чисто нелинейное, так как действие умножения является нелинейным.
— чисто нелинейное, так как действие умножения является нелинейным.
Выполним процесс линеаризации исходного уравнения, динамики без разложения я ряд Тейлора, основываясь на том, что в окрестности состояния (x0, y0) нормированные отклонения управляющего воздействия и регулируемой величины намного меньше 1.
Преобразования выполним в следующей последовательности:
- Перейдем к безразмерным переменным (нормализованным);
- Выполним линеаризацию, отбросив нелинейные члены 2-го и выше порядков малости.
Перейдем к новым безразмерным переменным:

Заметим, что:  .
.
Подставляя значения x(t) и y(t) в исходное уравнение:

Удаляем полученного уравнения уравнения стационара:  , а так же пренебрегая слагаемыми второго прядка малости:
, а так же пренебрегая слагаемыми второго прядка малости:  , получаем следующее уравнение:
, получаем следующее уравнение:

Вводим новые обозначения:

Получаем уравнения в «почти» классическом виде:

Если в правой части вынести за общую скобку и разделить все уравнение на , то уравнение (линеаризованное) принимает вид:


Процедура нормализации позволяет более просто линеаризовать уравнение динамики, так как не требуется выполнять разложение в ряд Тейлора (хотя это и не сложно).
2.3. Классический способ решения уравнений динамики
Классический метод решения уравнений динамики САУ (САР) применим только для линейных или линеаризованных систем.
Рассмотрим некоторую САУ (звено), динамика которой описывается линейным дифференциальным уравнением вида:

Переходя к полной символике, имеем: 

Выражение (2.3.2) — обыкновенное дифференциальное уравнение (ОДУ), точнее неоднородное ОДУ, так как правая часть ≠ 0.
Известно входное воздействие x(t), коэффициенты уравнения и начальные условия (т.е. значения переменных и производных при t = 0).
Требуется найти y(t) при известных начальных условиях.

где:  — решение однородного дифференциального уравнения
— решение однородного дифференциального уравнения  y_<част.>(t) $inline$ — частное решение. $inline$
y_<част.>(t) $inline$ — частное решение. $inline$
Будем называть решение однородного дифференциального уравнения  , собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
, собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
Вторую составляющую решения (2.3.3) будем называть  , вынужденным, так как эта часть решения определяется внешним воздействием
, вынужденным, так как эта часть решения определяется внешним воздействием  , поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:
, поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:

Напомним этапы решения:
1) Если имеется уравнение вида  , то сначала решаем однородное дифференциальное уравнение:
, то сначала решаем однородное дифференциальное уравнение:

2) Записываем характеристическое уравнение:

3) Решая уравнение (2.3.5), которое является типичным степенным уравнением, каким-либо способом (в том числе и с помощью стандартных подпрограмм на компьютере) находим корни характеристического уравнения 
4) Тогда собственное решение записывается в виде:

если среди нет повторяющихся корней (кратность корней равна 1).
Если уравнение (2.3.5) имеет два совпадающих корня, то собственное решение имеет вид:

Если уравнение (2.3.5) имеет k совпадающих корней (кратность корней равна k), то собственное решение имеет вид:

5) Вынужденную часть решения можно найти различными способами, но наиболее распространены следующие способы:
а) По виду правой части.
б) Методом вариации постоянных.
в) Другие методы…
Если вид правой части дифференциального уравнения – относительно несложная функция времени, то предпочтительным является способ а): подбор решения.  .
.
6) Суммируя полученные составляющие (собственную и вынужденную), имеем:

7) Используя начальные условия (t = 0), находим значения постоянных интегрирования  . Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
. Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
Пример
Найти аналитическое выражение переходного процесса на выходе звена, если

Решение. Запишем однородное ОДУ: 
Характеристическое уравнение имеет вид:  ; Решая, имеем:
; Решая, имеем:  тогда:
тогда:

где  — неизвестные (пока) постоянные интегрирования.
— неизвестные (пока) постоянные интегрирования.
По виду временной функции в правой части запишем  как:
как:

Подставляя в исходное уравнение, имеем:

Суммируя  , имеем:
, имеем: 
Используя 1-е начальное условие (при t = 0), получаем:  , а из 2-го начального условия имеем:
, а из 2-го начального условия имеем: 
Решая систему уравнений относительно  и
и  , имеем:
, имеем: 
Тогда окончательно:

Что бы проверить результ, выполним моделирование процесса в SimInTech, для этого преобразуем исходное уравнение к виду:

Создадим модель SimInTech, содержащую исходное динамическое уравнение и полученное аналитическое решение, и выведем результаты на один график (см. рис. 2.3.1).
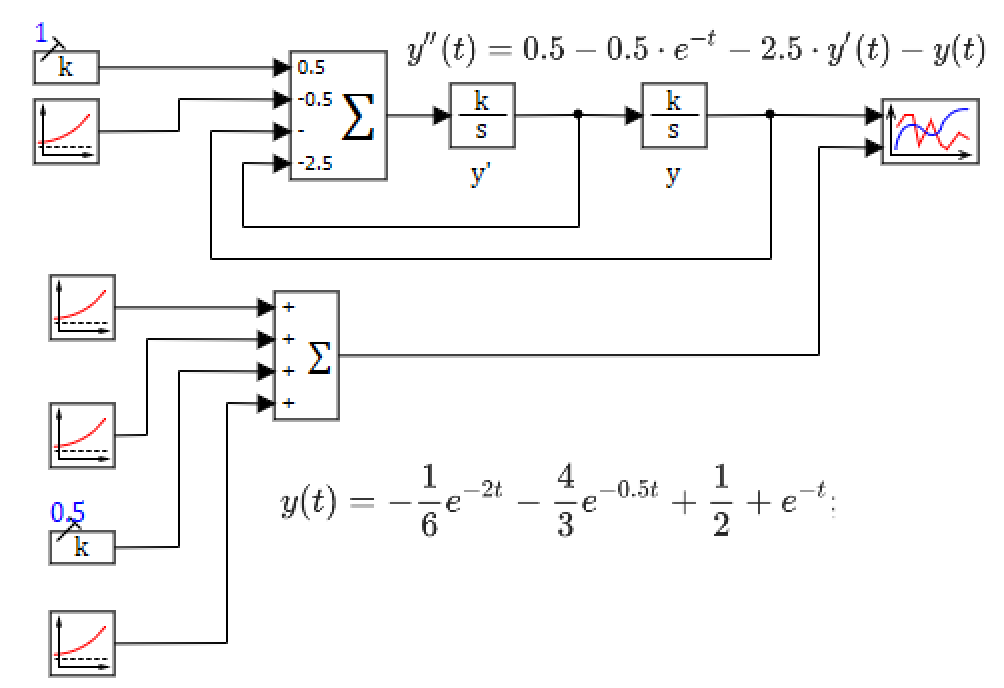
Рис. 2.3.1 – структурная схема для проверки решения
На рис. 2.3.2 приведено решение по вышеприведенному соотношению и численное решение задачи в среде SimInTech (решения совпадают и линии графиков «наложены» друг на друга).
Цифровые системы управления
Цифровые системы управления
В настоящее время широкое применение находят цифровые системы управления. Использование в этих системах цифровых вычислительных устройств обеспечивает реализацию достаточно сложных алгоритмов (законов) управления, а также высокую точность вычислений [7]. Цифровые САУ относятся к классу дискретных систем, в которых квантование сигнала осуществляется одновременно по времени и по уровню. При синтезе цифровых САУ можно использовать либо цифровую вычислительную машину, либо отдельные цифровые устройства в виде сумматоров, интеграторов и т.д. Использование цифровых устройств позволяет упростить САУ путем применения простых и надежных модулей. Введение в контур управления ЭВМ требует наличия в САУ вспомогательных элементов, осуществляющих преобразование непрерывных процессов в дискретные и обратно. Но это окупается возможностью реализации практически любого алгоритма управления. В зависимости от способа включения ЭВМ цифровые САУ могут быть трех типов:
— с ЭВМ, включенной вне замкнутого контура управления; в этом случае ЭВМ служит для формирования на основании наблюдаемого процесса y(t)
оптимального задающего воздействия на входе управляемой системы (УС):

— с ЭВМ в замкнутом контуре управления; при этом улучшения динамических свойств САУ достигают благодаря возможности формирования практически любого алгоритма управления и изменения его в процессе работы; точность такой САУ ограничивается непрерывным сравнивающим устройством, включенным в цепь управления до ЭВМ:

— с ЭВМ, в которой происходит сравнение задающего воздействия g(t) с выходным сигналом y(t). Такая САУ обладает всеми качествами предыдущей системы и к тому же является более точной за счет увеличения разрешающей способности цифрового сравнивающего устройства. С точки зрения структуры она охватывает обе предыдущие системы:

Выбор конкретного типа ЭВМ определяется в первую очередь теми функциями, которые САУ следует выполнять. Это может быть обработка поступающей информации, которая требует вычислительных или логических операций, улучшение динамических свойств системы, операции оптимизации по некоторым статическим или динамическим параметрам, операции контроля и т.д.
Рекомендуемые файлы
Теоретической базой для аналитических исследований цифровых САУ
может служить теория дискретныз систем. Сложность при этом состоит в обеспечении одновременного квантования сигнала и по времени и по уровню. Воспользуемся методами расчета, которые основаны на рассмотрении линеаризованных импульсных систем с учетом влияния оказываемого квантованием по уровню. Идеальный импульсный элемент преобразует непрерывный сигнал в мгновенные импульсы в виде  — функций, а экстрополятор формирует импульсы заданной формы из — импульсов. В простейшем случае импульсное звено можно выполнить в виде ключа, который замыкается с периодом Т. Если время замыкания ключа мало по сравнению с Т и постоянными времени непрерывной части системы, а сигнал на входе ключа е = const в замкнутом состоянии, то последовательность модулированных импульсов на входе ключа можно заменить последовательностью — функций:
— функций, а экстрополятор формирует импульсы заданной формы из — импульсов. В простейшем случае импульсное звено можно выполнить в виде ключа, который замыкается с периодом Т. Если время замыкания ключа мало по сравнению с Т и постоянными времени непрерывной части системы, а сигнал на входе ключа е = const в замкнутом состоянии, то последовательность модулированных импульсов на входе ключа можно заменить последовательностью — функций:

Значение каждой — функции пропорционально величине сигнала на входе ключа в момент его замыкания. На выходе импульсного элемента получают сигнал

Сигналы в импульсных системах обычно представляются дискретными (решетчатыми) функциями. При исследовании динамических свойств САУ в первую очередь необходимо определить ее передаточные функции. Рассмотрим сначала передаточные функции импульсных систем. Передаточная функция разомкнутой импульсной системы – это отношение изображений (в соответствии с дискретным преобразованием Лапласа) выходного сигнала к входному сигналу при нулевых начальных условиях, т.е.

Аналогично определяется эта передаточная функция в соответствии с z – преобразованием:

Для определения передаточной функции W(z) по известной передаточной функции приведенной непрерывной части САУ W(s) необходимо сначала с помощью обратного преобразования Лапласа найти весовую функцию непрерывной части системы

Затем по этой функции определить соответствующую ей дискретную весовую функцию  , по которой, используя z – преобразование, найти искомую передаточную функцию:
, по которой, используя z – преобразование, найти искомую передаточную функцию:
Люди также интересуются этой лекцией: Лекция 4.
 .
.
Передаточная функция вычислительной машины – это отношение изображений выходного сигнала к входному, которые взяты в безразмерной (цифровой) форме:
 ,
,
где  и
и  есть z — изображения решетчатых функций
есть z — изображения решетчатых функций  и
и  . Переходя от изображений к оригиналам, из последнего выражения можно получить разностное уравнение вычислительной машины:
. Переходя от изображений к оригиналам, из последнего выражения можно получить разностное уравнение вычислительной машины:

которое соответствует линейному алгоритму ее работы. Из уравнения следует, что настоящее значение выходного сигнала определяется предыдущими его значениями и настоящими и предыдущими значениями входного сигнала. При синтезе и анализе цифровых САУ применяются частотные передаточные функции и частотные характеристики. Анализ качества цифровых САУ выполняется аналогично анализу качества дискретных САУ.
http://habr.com/ru/post/506984/
http://studizba.com/lectures/1-avtomatizaciya/40-osnovy-teorii-upravleniya/619-56-cifrovye-sistemy-upravleniya.html