iSopromat.ru

Рассмотрим понятия угловой скорости и углового ускорения при вращении твердого тела:
Угловая скорость
Угловой скоростью называют скорость вращения тела, определяющаяся приращением угла поворота тела за промежуток времени.
Обозначение: ω (омега).
Формулы угловой скорости
Формула для расчета угловой скорости в зависимости от заданных параметров вращения может иметь вид:
- если известно количество оборотов n за единицу времени t:

- если задан угол поворота φ за единицу времени:
- Количество оборотов за единицу времени [об/мин], [c -1 ].
- Угол поворота за единицу времени [рад/с].
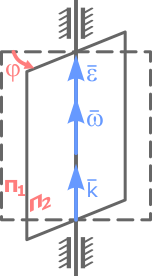
Быстрота изменения угла φ (перемещения из положения П1 в положение П2) – это и есть угловая скорость:
Например, тело совершающее 1,5 оборота за одну секунду имеет угловую скорость
Приняв k как единичный орт положительного направления оси, получим:
Вектор угловой скорости – скользящий вектор: он может быть приложен к любой точке оси вращения и всегда направлен вдоль оси, при положительном значении угловой скорости направления ω и k совпадают, при отрицательном – противоположны.
Угловое ускорение
Угловое ускорение характеризует величину изменения угловой скорости при вращении твердого тела:

Единицы измерения углового ускорения: [рад/с 2 ], [с -2 ]
Вектор углового ускорения так же направлен по оси вращения. При ускоренном вращении их направления совпадают, при замедленном — противоположны.
Другими словами, при положительном ускорении угловая скорость нарастает, а при отрицательном вращение замедляется.
Для некоторых частных случаев вращательного движения твердого тела могут быть использованы формулы:
- равномерное вращение ( ω — const)
В технике угловая скорость часто задается в оборотах в минуту n [об/мин]. Один оборот – это 2π радиан:
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Угловое ускорение
Система понятий кинематики включает в себя также такую величину как угловое ускорение тела. Дадим ей определение, рассмотрим основные аспекты с использованием примеров.
Основные понятия
Угловое ускорение – величина, характеризующая изменение скорости с течением времени.
Пусть рассматриваемый промежуток времени это: Δ t = t 1 — t , а изменение угловой скорости составит Δ ω = ω 1 — ω , тогда числовое значение среднего углового ускорения за тот же интервал времени: » open=» ε = ∆ ω ∆ t = ε . Перейдем к пределу, когда Δ t > 0 , тогда формула углового ускорения будет иметь вид: ε = l i m ∆ t → 0 ∆ ω ∆ t = d ω d t = d 2 φ d t = ω ˙ = φ ¨ .
Числовое значение ускорения в заданный момент времени есть первая производная от угловой скорости или вторая производная от угла поворота по времени.
Размерность углового ускорения 1 T 2 (т.е. 1 в р е м я 2 ). Укажем также, в чем измеряется угловое ускорение: за единицу измерения стандартно принимается р а д / с 2 или иначе: 1 с 2 ( с — 2 ) .
Ускоренное вращение тела – это вращение, при котором угловая скорость (ее модуль) возрастает с течением времени.
Замедленное вращение тела – это вращение, при котором угловая скорость (ее модуль) убывает с течением времени.
В общем, довольно просто заметить, что, если ω и ε имеют одинаковые знаки, наблюдается ускоренное вращение, а, когда противоположные знаки – замедленное.
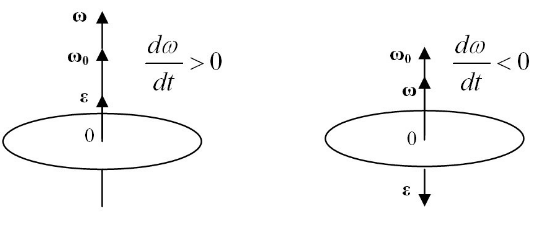
Рисунок 1 . Вектор углового ускорения
Если мы представим угловое ускорение как вектор ε → = d ω → d t , имеющий направление вдоль оси вращения, то в случае ускоренного вращения ε → и ω → совпадут по направлениям (левая часть
рисунка 1 ) и будут противоположны по направлениям в случае замедленного вращения (правая часть
рисунка 1 ).
Закон равнопеременного вращения
Равнопеременное вращение – вращение, при котором угловое ускорение во все время движения является постоянным ( ε = c o n s t ) .
Выведем формульно закон равнопеременного вращения. Пусть в начальный момент времени t 0 угол вращения равен ϕ = ϕ 0 ; угловая скорость — ω = ω 0 (т.е. ω 0 является начальной угловой скоростью).
Выражение ε = d ω d t = ω ˙ = φ ¨ дает нам возможность сделать запись: d ω = ε d t . Проинтегрируем левую часть крайней записи в пределах от ω 0 до ω , а правую – в пределах от 0 до t , тогда:
ω = ω 0 + ε t , d φ = ω 0 d t + ε t d t .
Проинтегрируем вторично и получим формулу, выражающую закон равнопеременного вращения:
Закон равнопеременного вращения: φ = φ 0 + ω t + ε t 2 2 .
Вращение является равноускоренным, когда ω и ε имеют одинаковые знаки.
Вращение является равнозамедленным, когда ω и ε противоположны по знаку.
Угловое ускорение имеет связь с полным и тангенциальным ускорениями. Пусть некоторая точка вращается неравномерно по окружности с радиусом R , тогда: α r = ε R . Нормальное ускорение имеет также связь с угловым: a n = ω 2 R . Учтем это выражение и для полного ускорения получим: a = a r 2 + a n 2 = R ε 2 + ω 4 Для равнопеременного движения: ω = ε t ; a n = ω 2 R = ε 2 t 2 R и a = R ε 2 + ε 4 t 4 = R ε 1 + ε 2 t 4 .
Практические примеры
На рисунке 2 заданы различные типы вращения гироскопа (волчка). С учетом соответствующих подписей необходимо указать, какой рисунок верно демонстрирует направление углового ускорения.
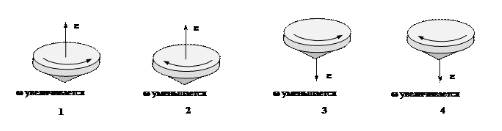
Правило буравчика (правого винта) связывает направление вращения и псевдовектор угловой скорости. Рисунки 2 . 1 . и 2 . 3 . показывают направление псевдовектора вверх, а рисунки 2 . 2 . и 2 . 4 . – вниз.
Когда угловая скорость возрастает, ее приращение и вектор ускорения совпадут с вектором угловой скорости (рисунки 2 . 1 . и 2 . 4 . ). Когда угловая скорость будет уменьшаться, ее приращение и вектор ускорения окажутся противоположно направлены вектору угловой скорости (рисунки 2 . 2 . и 2 . 3 . ). Таким образом, все рисунки демонстрируют верное направление углового ускорения.
Пусть задана некоторая материальная точка, совершающая движение по окружности с радиусом R . При этом выражение ϕ = α t 3 отражает зависимость угла поворота от времени. Необходимо найти полное ускорение заданной точки как функцию времени.
Запишем выражения для угловой скорости и углового ускорения заданной точки:
ω = d φ d t = 3 α t 2 ; ε = 6 α t .
Полное ускорение запишем как:
a = a r 2 + a n 2 = R ε 2 + ω 4 = R 36 a 2 t 2 + 81 a 4 t 8 = 3 a t R 4 + 9 a 2 t 6 .
Кинематика вращательного движения
Вы будете перенаправлены на Автор24
Если все точки тела совершают движения по окружностям, при этом все центры данных окружностей находятся на одной прямой, тогда такое движение тела (системы) называют вращением. При этом ось, на которой находятся центры окружностей, получила название оси вращения:
- ее положение может быть внутри тела (системы) или вне его;
- она может двигаться или быть неподвижной;
- плоскости траекторий движения точек тела перпендикулярны оси вращения;
- в трехмерном пространстве каждое вращение обладает осью вращения (теорема Эйлера).
Угловая скорость
Допустим, что некоторое твердое тело совершает вращения вокруг неподвижной оси. В таком движении точки данного тела описывают окружности. Центы этих окружностей принадлежат оси вращения, радиусы их различны.
Рассмотрим одну точку нашего тела. Пусть она перемещается по окружности, радиус которой равен $R$ (рис.1).
Рисунок 1. Угловая скорость. Автор24 — интернет-биржа студенческих работ
Положение, рассматриваемой точки будем задавать при помощи угла поворота $\Delta \varphi$.
Элементарно малые углы поворота можно рассматривать как векторы. При этом величина вектора $d\vec \varphi$ равна величине угла поворота $\Delta \varphi$ (рис.1).
Направление $d\vec \varphi$ подчинено правилу правого буравчика, то есть направлено вдоль направления поступательного перемещения острия винта, при вращении его головки, совпадающем с направлением вращения точки по ее окружности.
$d\vec \varphi$ называют аксиальным вектором (псевдовектором). Псевдо векторы не имеют точки приложения, их изображают в любой точке на оси вращения.
Готовые работы на аналогичную тему
$\vec \omega$ — угловая скорость.
Вектор $\omega$ направлен по оси вращения (правило правого винта), и совпадает по направлению с элементарным углом поворота $d\vec \varphi$ (рис.1).
Единица $\omega$ — это радиан, деленный на секунду (рад/с).
Линейную скорость нашей материальной точки можно связать с угловой скоростью, эту связь легко установить, рассматривая рис.1.
Мы получили, линейная скорость по величине равна:
В виде вектора линейная скорость материальной точки, определяется так:
$\vec v = \vec \omega \times \vec R (3),$
где $R$ — радиус окружности.
Из формулы (3) следует, что величина линейной скорости равна:
$v=\omega \times R sin (\alpha )(4),$
где $\alpha$ — угол между векторами $\vec \omega$ и $\vec R$.
Направление результата векторного произведения в (4) определяет правило правого винта. Головку винта вращают от $\vec \omega$ к $\vec R$, поступательное перемещение острия указывает направление $\vec v$.
При постоянной угловой скорости вращение называют равномерным.
Период вращения
Для характеристики равномерного вращения вводят такую физическую величину, как период вращения $T$.
Периодом вращения называют время, равное времени полного оборота точки на угол в $360^0 C$:
Величину, обратную периоду вращения называют частотой ($\nu$):
$\omega = 2\pi \nu (7).$
Угловое ускорение
Угловым ускорением называют вектор, равный:
или второй производной от угла поворота:
При движении по окружности вектор $\omega$ изменяется только по величине, не изменяя своего направления. В этом случае полное ускорение материальной точки можно найти, применяя выражение (3) и (8) как:
$\vec \varepsilon= \frac
Если тело совершает вращения около неподвижной оси, то $\vec \varepsilon$ имеет направление вдоль оси вращения тела.
Если угловая скорость вращения тела увеличивается (вращение ускоренное), то вектор углового ускорения и вектор угловой скорости сонаправлены.
При замедленном вращении векторы углового ускорения и угловой скорости имеют противоположные направления.
Тангенциальная и нормальная компоненты линейного ускорения
По определению, составляющая линейного ускорения ($a_<\tau>$), которая отвечает за изменение величины скорости движения тела (тангенциальное ускорение) равна:
Принимая во внимание выражение (2), мы получим:
Ускорение, отвечающее за изменение направления скорости движения при криволинейном перемещении – это нормальное (или центростремительное ускорение) ($a_n$) равно:
Использовав формулу (2), имеем:
Мы получили связи между линейными параметрами движения:
- длиной пути ($s$) пройденным, материальной точкой по дуге окружности радиуса $R$;
- линейной скоростью перемещения точки $v$;
- тангенциальным ускорением $a_<\tau>$;
- нормальным ускорением $a_n$
и угловыми величинами:
- углом поворота $\varphi$;
- угловой скоростью $\omega$;
- угловым ускорением $varepsilon$.
$s=R\Delta \varphi$, $v=R\omega$, $a_<\tau>=R\varepsilon$, $a_n=\omega^2R.$
Вращение с постоянным угловым ускорением
Если вращение материальной точки происходит с постоянным угловым ускорением ($\varepsilon = const$,), то его называют равнопеременным.
В таком случае это движение можно описывать при помощи следующих уравнений. Для угловой скорости имеют место равенства:
$\omega = \omega _0+\varepsilon t (13) $
при вращении с положительным ускорением (равноускоренное движение) и
$\omega = \omega _0-\varepsilon t (14) $
при равнозамедленном вращении. В формулах (13) и (14) $\omega_0$ — начальная скорость вращения.
Угол поворота материальной точки при равноускоренном движении задает формула:
$\varphi= \varphi_0 + \omega _0 t +\frac<\varepsilon t^2> <2>(15)$
при равноускоренном движении
$\varphi= \varphi_0 + \omega _0 t — \frac<\varepsilon t^2> <2>(16)$
при равнозамедленном движении. В уравнениях (15) и (16) $\varphi_0 $ — начальный угол поворота.
Получи деньги за свои студенческие работы
Курсовые, рефераты или другие работы
Автор этой статьи Дата последнего обновления статьи: 08 05 2021
http://zaochnik.com/spravochnik/fizika/kinematika/uglovoe-uskorenie/
http://spravochnick.ru/fizika/kinematika_vraschatelnogo_dvizheniya/