Основные уравнения двигателя постоянного тока (ДПТ)

В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
Основные теоретические положения
Важное свойство ДПТ с независимым возбуждением от постоянных магнитов состоит в том, что результирующий момент сил от всех проводников якоря, называемый электромагнитным моментом двигателя M, пропорционален току якоря Iя, потребляемому двигателем от источника питания:
 ,
,
где k m — коэффициент пропорциональности, называемый постоянной момента двигателя. Его размерность [Нм/А]. По законам электромагнитной индукции в проводнике, движущемся в магнитном поле, возникает электродвижущая сила. Суммарная ЭДС катушек якоря E через коллектор и щетки прикладывается к внешним выводам двигателя. В двигательном режиме работы эта ЭДС направлена против внешнего напряжения U я, подведенного к якорю от источника питания. Поэтому ЭДС двигателя часто называется противоЭДС. Она прямо пропорциональна угловой скорости вращения вала двигателя w дв[рад/с]:
 ,
,
где k ω — коэффициент пропорциональности, называемый постоянной ЭДС двигателя. Его размерность [Вс/рад].
Природа электромагнитных явлений в ДПТ такова, что если используется система единиц СИ, то значения коэффициентов k ω и km численно равны.
Уравнения, описывающие электрические процессы в ДПТ
В электрической якорной цепи двигателя протекает ток I я под действием напряжения постоянного тока Ua источника питания и противоЭДС двигателя.
 Рис. 1
Рис. 1
Эта цепь характеризуется параметрами: активным сопротивлением R я [Ом] и индуктивностью L я [Гн] якорной обмотки. Вращающийся ротор, обладающий моментом инерции Ja [Нм с 2 /рад] , приводится в движение одновременным действием электромагнитного момента двигателя M дв и момента внешних сил M вн, приложенного к валу двигателя.
Исходные дифференциальные уравнения ДПТ составляются на основании законов физики. Для электрической цепи используется второй закон Кирхгофа, согласно которому можно записать уравнение
 ,
,
где член R я I я характеризует падение напряжения на активном сопротивлении якорной цепи в соответствии с законом Ома, а член L я ( dI я/ dt ) отражает наличие ЭДС самоиндукции, возникающей в обмотке при изменении тока якоря. В представленном уравнении не учитывается падение напряжения на щетках, зависящее нелинейно от тока якоря, но имеющее, как правило, относительно небольшое значение по сравнению с напряжением U я .
Дифференциальное уравнение, характеризующее процессы в механической части двигателя, составляется на основании второго закона Ньютона:
 ,
,
где M вн — момент внешних сил, действующий относительно оси вращения вала двигателя. В этом уравнении не учитывается действие сил трения, возникающих при вращении ротора, но оказывающих относительно слабое действие на ускорение вала ДПТ.
Используя вышеприведенные формулы и приводя дифференциальные уравнения к нормальной форме Коши, получим описание ДПТ в форме:
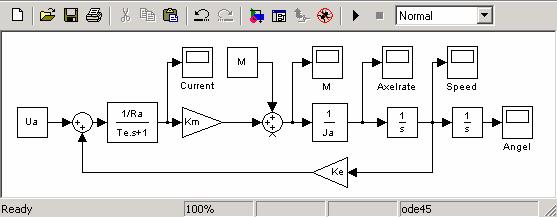
Для исследования процессов с помощью ЭВМ удобно использовать структурное представление математической модели ДПТ. Для этого преобразуем полученную систему линейных дифференциальных уравнений по Лапласу при нулевых начальных условиях. В результате получим систему алгебраических уравнений:
в которых s — переменная Лапласа, а величины I я( s ), w дв( s ), U я( s ), M вн( s ) — изображения по Лапласу переменных I я , w дв, U я, M вн соответственно. После эквивалентных преобразований эти уравнения могут быть представлены в форме:
где Тэ = L я / R я — электромагнитная постоянная времени якорной цепи двигателя.
По уравнениям с помощью системы SIMULINK может быть сформирована структурная схема ДПТ для его математического моделирования (рис.1).
Важным параметром ДПТ, определяющим его динамические свойства, является электромеханическая постоянная времени двигателя:
 .
.
Зависимость между электромагнитным моментом двигателя и частотой вращения ротора в установившемся режиме при постоянных U я и M вн называется механической характеристикой двигателя. Уравнение механической характеристики имеет вид:
 .
.
При пуске двигателя, когда скорость равна нулю, развивается пусковой момент
 .
.
Частота вращения вала двигателя при отсутствии сопротивления называется частотой вращения холостого хода
 .
.
Момент двигателя постоянного тока
Если обмотку возбуждения и якорь двигателя подключить к сети постоянного тока напряжением U то, возникает электромагнитный вращающий момент Мэм. Полезный вращающий момент М на валу двигателя меньше электромагнитного на значение противодействующего момента, создаваемого в машине силами трения и равного моменту Мх в режиме х.х., т. е. М = Мэм—Мх.
Пусковой момент двигателя должен быть больше статического тормозного Мт в состоянии покоя ротора, иначе якорь двигателя не начнет вращаться. В установившемся режиме (при n = соnst) имеет место равновесие вращающего М и тормозного Мт моментов:
Из механики известно, что механическая мощность двигателя может быть выражена через вращающий момент и угловую скорость

Следовательно, полезный вращающий момент двигателя М (Н • м), выраженный через полезную мощность Р (кВт) и частоту вращения n (об/мин),
Обсудим некоторые важные вопросы пуска и работы двигателей постоянного тока. Из уравнения электрического состояния двигателя следует, что
В рабочем режиме ток якоря Iя ограничивается э. д. с. E, если n приблезительно равно nном. В момент пуска п = 0, э. д. с. Е = 0 и пусковой ток Iп = U/Rяв 10—30 раз больше номинального. Поэтому прямой пуск двигателя, т. е. непосредственное включение якоря на напряжение сети, недопустимо. Чтобы ограничить большой пусковой ток якоря, перед пуском последовательно с якорем включается пусковой реостат Rп с небольшим сопротивлением. В этом случае при Е = О
После пуска и разгона наступает установившийся режим работы двигателя, при котором тормозной момент на валу Мт будет уравновешиваться моментом, развиваемым двигателем Мэм, т. е. Мэм == Мт(при n = соnst.)
Электродвигатели постоянного тока могут восстанавливать нарушенный изменением тормозного момента установившийся режим работы, т. е. могут развивать вращающий момент М, равный новому значению тормозного момента Мт при соответственно новой частоте вращения n’.
Действительно, если тормозной момент нагрузки Мт окажется больше вращающего момента двигателя Мэм, то частота вращения якоря уменьшится. При постоянных напряжении U и потоке Ф это вызовет уменьшение э. д. с. Е якоря, увеличение тока якоря и вращающего момента до наступления равновесия, при котором Мэм = Мт и n’ n’. Таким образом, двигатели постоянного тока обладают свойством саморегулирования — могут развивать вращающий момент, равный тормозному.
Регулирование частоты
Частота вращения якоря двигателя постоянного тока определяется на основании уравнения электрического состояния U = Е + RяIяпосле подстановки в него э. д. с. Е = сФn:
 (13)
(13)
Падение напряжения в якоре RяIя небольшое: при номинальной нагрузке оно не превышает 0,03 — 0,07 Uном.
Таким образом, частота вращения двигателя постоянного тока прямо пропорциональна приложенному напряжению сети и обратно пропорциональна магнитному потоку статора. Из уравнения (13) следует, что регулировать частоту вращения двигателя можно двумя способами: изменяя поток статора Ф или напряжение U подводимое к двигателю. Регулирование частоты вращения изменением магнитного поля машины осуществляется с помощью регулировочного реостата в цепи возбуждения двигателя. Изменение подводимого к двигателю напряжения производится регулированием напряжения источника.
Можно ввести дополнительный реостат в цепь якоря. В этом случае пусковой реостат заменяется пускорегулирующимRпр Такой реостат выполняет функции как пускового реостата, так и регулировочного. Уравнение (13) при этом имеет вид
 (14)
(14)
Отсюда следует, что регулирование частоты вращения двигателя можно осуществить, изменяя напряжение сети, сопротивление пускорегулирующего реостата или поток статора.
Реверсирование двигателей. Из уравнения вращающего момента двигателя Мэм = kФIя вытекает, что реверсирование, т. е. изменение направления вращения якоря, может быть осуществлено изменением направления тока в обмотке возбуждения (потока Ф) или тока якоря.
Для реверсирования двигателя «на ходу» изменяют направление тока якоря (переключением якорных выводов), а обмотку возбуждения не переключают, так как она обладает большой индуктивностью и разрыв ее цепи с током недопустим. Реверсирование отключенного двигателя осуществляется и изменением направления тока в обмотке возбуждения (переключением ее выводов).[4]
http://imed.narod.ru/el_mech/motor_dc.htm
http://allrefrs.ru/4-15201.html