Уравнение баланса активных и реактивных мощностей
Рабочие режимы электроэнергетических систем.
Характерной особенностью установившегося режима работы ЭЭС является одновременность процессов генерирования и потребления одного и того же количества мощности. В любой момент установившегося режима ЭЭС суммарная мощность, вырабатываемая генераторами электростанций, равна суммарной потребляемой мощности в этот же момент времени. Такое соотношение вырабатываемой и потребляемой мощностей называется балансом активной мощности [1,5].
Уравнение баланса активной мощности для ЭЭС имеет вид:
Р г = Р н + Р сн + Р пот = Р п (9.1) 
где S P г — суммарная генерируемая активная мощность в ЭЭС, включая активную мощность, получаемую из соседних ЭЭС;
S P н — суммарная активная мощность потребителей в ЭЭС, включая активную мощность, передаваемую в соседние ЭЭС;
S P сн — суммарная мощность собственных нужд электростанций;
S P пот — суммарные потери активной мощности;
S P п — суммарное потребление активной мощности.
Баланс активной мощности в ЭЭС составляется для периода прохождения годового максимума нагрузки. Величина суммарной активной мощности потребителей S P н при эксплуатационных расчетах определяется суммированием максимальных мощностей узлов нагрузок с учетом коэффициента разновременности максимумов kpa . При проектировании развития ЭЭС величина S P н рассчитывается на основании проектных данных и прогнозирования роста нагрузок.
Потери активной мощности в ЭЭС зависят от протяженности линий электрических сетей, числа трансформаций от источников питания до потребителей и составляют 10 – 15% от суммарной активной мощности потребителей S P н. Мощность собственных нужд электростанций S P сн зависит от типа станции, ее оборудования и вида используемого топлива. Для тепловых станций эта величина составляет 5 -12% от мощности станции, для гидроэлектростанций — 0,5 – 1%.
При выполнении равенства (9.1) частота в ЭЭС неизменна и определяется частотой вращения турбин генераторов. Любое изменение генерируемой или потребляемой мощности приводит к изменению частоты в ЭЭС.
Увеличение потребляемой мощности или уменьшение генерируемой мощности равнозначно уменьшению впуска энергоносителя (пара, воды) в турбины генераторов. В этом случае турбины генераторов начнут тормозиться, приводя к уменьшению частоты в ЭЭС. В соответствии со статическими характеристиками нагрузки снижение частоты в ЭЭС вызовет уменьшение потребляемой мощности. В результате в ЭЭС установится новый режим с меньшим значением частоты, чем в предшествующем режиме.
Уменьшение потребляемой мощности или увеличение генерируемой мощности равнозначно дополнительному впуску энергоносителя в турбины генераторов. В этом случае турбины генераторов начнут разгоняться, приводя к увеличению частоты в ЭЭС. В соответствии со статическими характеристиками нагрузки повышение частоты в ЭЭС вызовет увеличение потребляемой мощности в результате в ЭЭС установится новый режим с большим значением частоты, чем в предшествующем режиме.
Причины изменения частоты в ЭЭС могут быть самыми различными: аварийное отключение линии или трансформатора связи между отдельными частями ЭЭС, резкое увеличение мощности потребителей и т.п.
Отклонение частоты f от ее номинального значение f ном = 50 Гц.
∆ f = f — f ном (9.2) 
как один из показателей качества электроэнергии регламентируется ГОС 13109 -97, который устанавливает нормально допустимые ( ± 0,2 Гц) и предельно допустимые ( ± 0,4 Гц) отклонения частоты
Достаточно жесткие требования к поддержанию частоты обусловлены значительным ее влиянием на технологические производственные процессы, на производительность механизмов потребителей и в особенности на производительность механизмов собственных нужд электростанций, от режима работы которых в значительной мере зависит надежность работы электростанций и выдаваемая ими мощность.
Повышение частоты, обусловленное избытком генерируемой мощности в ЭЭС, устраняется, как правило, уменьшением впуска энергоносителя в турбины или отключением части генераторов в ЭЭС.
Более сложной задачей является поддержание частоты на требуемом уровне при ее понижении, обусловленном дефицитом генерируемой мощности в ЭЭС. В этом случае увеличивают впуск энергоносителя в турбины, недостаточности такого увеличения включают резерв мощности.
При дальнейшем снижении частоты в ЭЭС и недостаточной мощности резерва выполняется автоматическое ограничение снижения частоты. Это системная автоматика выполняется с таким расчетом, чтобы при любом возможном дефиците генерируемой мощности, включая и аварийные режимы, снижение частоты ниже уровня 45 Гц было бы исключено полностью. Время работы с частотой ниже 47 Гц не должно превышать 20 с, а с частотой 48,5 Гц – 60 с. Одной из основных функций автоматического ограничения снижения частоты является автоматическая частотная разгрузка (АЧР).
АЧР предусматривает дискретное отключение потребителей по мере снижения частоты в ЭЭС. Комплекты АЧР устанавливаются, как правило, на подстанциях электрической сети. Реле частоты, входящее в комплект АЧР, дает сигнал на отключение части линий, питающих потребителей, при снижении частоты в ЭЭС до величины уставки этого реле. Очередность отключения потребителей выбирается по условию минимального ущерба от перерыва электроснабжения.
Регулирование частоты в электрических системах требует изменения мощности, которую генераторы выдают в сеть. Мощность генераторов в установившихся режимах и ее изменения определяются мощностью турбины, которыми эти генераторы приводятся во вращение. Поэтому, рассматривая возможности регулирования частоты в электрических системах, необходимо проанализировать характеристики первичных двигателей – тепловых и гидравлических турбин, определяющих изменение их мощности под действием систем регулирования.
На рис.9.1,а изображена характеристика нерегулируемой турбины, мощность которой неизменна, — это прямая, параллельная вертикальной оси, Рт1 = const . Статические характеристики нагрузок по частоте – это кривые 3,1,2, соответствующие нагрузкам Рн3 соответствует частоте f 2 , т.е. увеличение нагрузки от Рн1 до Рн2 приводит к уменьшению частоты от f ном до f 2 .
Если турбина имеет автоматический регулятор скорости, то он изменяет отпуск энергоносителя (пара или воды) через турбину в зависимости от нагрузки. Регуляторы скорости турбин оказывают стабилизирующее влияние на частоту в системе и поэтому часто называются первичными регуляторами частоты. Процесс изменения частоты под действием этих регуляторов называется первичным регулированием частоты.
Регуляторы скорости турбины могут иметь астатическую или статическую (рис.9.1, б и в) характеристику. При изменении электрической нагрузки под действием регулятора скорости либо восстановится номинальная частота, либо установится некоторая новая частота, близкая к f ном .
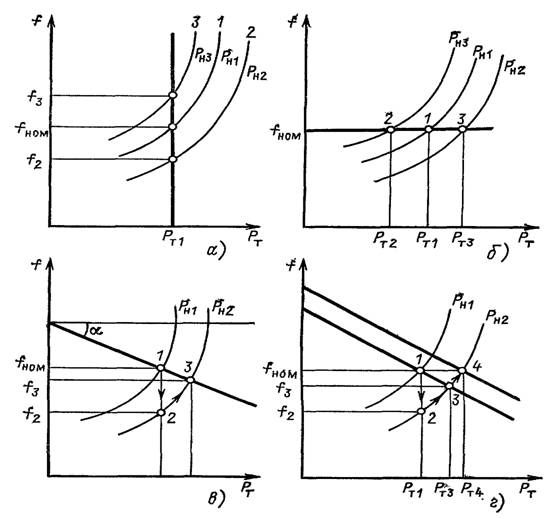
Рис.9.1. Характеристики регуляторов скорости турбины:
а – нерегулируемая турбина; б – астатическая характеристика; в – статическая характеристика; г – вторичное регулирование частоты (АРЧ)
В первом случае, когда после изменения нагрузки и окончания переходного процесса регулятор восстанавливает номинальную частоту, регулирование называется астатическим (рис.9.1, б). Если при изменении нагрузки и окончания переходного процесса устанавливается новая, отличная от номинальной частота, то такое регулирование называется статическим (рис.9.1, в).
Реальные регуляторы скорости имеют статическую характеристику. Добиться астатической характеристики у регулятора практически очень трудно.
Для астатического регулирования, т.е. для дополнительной корректировки частоты в системе, применяется так называемое вторичное регулирование. В процессе вторичного регулирования осуществляется изменение мощности, развиваемой турбинами, в зависимости от частоты переменного тока. Вторичное регулирование ведется либо автоматическими регуляторами частоты (вторичными регуляторами скорости), либо обслуживающим персоналом системы (вручную), который контролирует частоту по показаниям приборов. В результате вторичного регулирования статическая характеристика перемещается параллельно самой себе до тех пор, пока частота не станет номинальной (рис.9.1, г)
Регулирование частоты в электроэнергетической системе осуществляют несколько электростанций. ЭЭС включает в себя большое количество электростанций, работающих параллельно на общую сеть. При изменении потребляемой активной мощности частота в энергосистеме меняется. Если дежурный персонал каждой электростанции начнет регулировать частоту, то частота в ЭЭС не сможет быть восстановлена на уровне номинального значения из-за несогласованных действий персонала различных станций. Поэтому задача регулирования частоты в ЭЭС возлагается не на все, а на одну или несколько электростанций с суммарной мощностью, достаточной для покрытия всех возможных изменений потребляемой мощности в ЭЭС. Такие станции называются балансирующими по частоте.
Как отмечалось выше, характерной особенностью установившегося режима работы ЭЭС является одновременность процессов генерирования и потребления одного и того же количества мощности. Следовательно, в установившемся режиме работы ЭЭС в каждый момент времени соблюдается баланс как активной, так и реактивной мощностей.
Q г = Q н + Q сн + Q пот = Q п (9.3) 
S Q г – суммарная реактивная мощность, генерируемая в ЭЭС, включая реактивную мощность, поступающую из соседних ЭЭС;
S Q н — суммарная реактивная мощность потребителей ЭЭС, включая реактивную мощность, отдаваемую в соседние ЭЭС;
S Q сн — суммарная реактивная мощность собственных нужд электростанций;
S Q пот — суммарные потери реактивной мощности;
S Q п — суммарное потребление реактивной мощности в ЭЭС.
Генерация реактивной мощности S Q г в ЭЭС осуществляется не только генераторами электростанций, но и высоковольтными воздушными и кабельными линиями электропередачи (за счет их емкостной проводимости), а также специально устанавливаемыми в ЭЭС источниками реактивной мощности, называемых также компенсирующими устройствами (КУ).
Таким образом, уравнение баланса реактивной мощности можно записать более подробно:
Q эс + Q с + Q к = Q н + Q сн + Q пот = Q п (9.4) 
где S Q эс — суммарная реактивная мощность, вырабатываемая генераторами электростанций, включая реактивную мощность, поступающую из соседних ЭЭС;
S Q с — суммарное генерирование реактивной мощности воздушными и кабельными линиями электропередачи;
S Q к — суммарная КУ.
Баланс реактивной мощности рассчитывается, как правило, для режима наибольшей нагрузки. Реактивная мощность, вырабатываемая генераторами электростанций S Q эс , определяется их загрузкой активной мощностью и коэффициентом мощности cos j , номинальное значение которого составляет 0,8 – 0,9. Генераторы являются основными источниками реактивной мощности и вырабатывают около 60% требуемой в ЭЭС реактивной мощности.
Суммарная реактивная мощность потребителей S Q н определяется на основании данных о расчетных активных нагрузках потребителей и коэффициентах мощности этих потребителей.
Потери реактивной мощности в трансформаторах зависят от их загрузки и достигают при одной трансформации 10 – 12% от полной передаваемой мощности.
Потери реактивной мощности в линиях зависят от их протяженности и загрузки и могут достигать 10% от передаваемой по линиям полной мощности.
Реактивная составляющая нагрузки собственных нужд электростанций S Q сн включая потери мощности в трансформаторах собственных нужд, определяется по активной мощности собственных нужд с учетом cos j @ 0,7. Генерация реактивной мощности высоковольтными линиями электропередачи S Q с составляет около 20% требуемой в ЭЭС реактивной мощности.
После оценки значений всех составляющих баланса реактивной мощности рассчитывается требуемая мощность компенсирующих устройств Q к  , которую необходимо разместить в ЭЭС.
, которую необходимо разместить в ЭЭС.
Нарушение баланса реактивной мощности приводит к изменению уровня напряжения в сети. Если генерируемая реактивная мощность становится больше потребляемой, то напряжение в сети повышается. При дефиците реактивной мощности напряжение в сети понижается. Для пояснения указанной связи напомним, что, например, емкостной ток лини на холостом ходу повышает напряжение на ее конце. Соответственно избыток генерируемой мощности приводит к повышению, а ее недостаток – к понижению напряжения.
Энергосистемы дефицитные по активной мощности, дефицитны и по реактивной мощности. Однако недостающую реактивную мощность эффективнее не передавать из соседних энергосистем, а генерировать в компенсирующих устройствах, установленных в данной энергосистеме.
Рассмотрим, как реагирует нагрузка на изменение режима в простейшей электрической системе, представленной на рис.9.2. Пусть из-за аварии или по другим причинам напряжение U 2 в конце линии понижается.
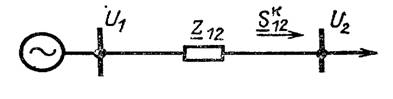
Рис.9.2. Схема простейшей электрической системы
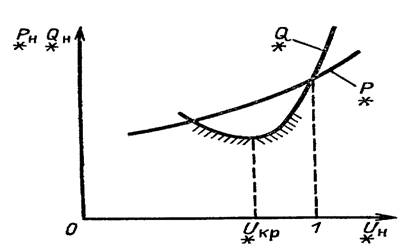
Рис.9.3. Статические характеристики нагрузки
Покажем, что нагрузка в силу своего положительного регулирующего эффекта повысит напряжение U 2 . Напряжение в конце линии можно представить в следующем виде:
U 2 ≈ U 1 -∆ U 12 = U 1 — Р 12 к r 12 + Q 12 к x 12 U 2 (9.5) 
где P k 12 , Q k 12 , — активная и реактивная мощности в конце линии; r 12 , x 12 — активное и реактивное сопротивления линии.
При понижении U 2 в соответствии со статическими характеристиками (рис.9.3) будут уменьшаться значения P 2 и Q 2 , а также P k 12 и Q k 12 , следовательно, будут уменьшаться потери D U 12 , а значение U 2 вследствие этого будут увеличиваться. Рост U 2 при уменьшении D U 12 понятен из приведенной выше формулы в предположении, что U 2 поддерживается постоянным. Все это справедливо в случае, когда
U > U kp = 0,7÷0,8 U ном (9.6) 
Нагрузка имеет положительный регулирующий эффект при U ³ U кр и отрицательный регулирующий эффект при U U кр . В последнем случае понижение U 2 вызывает рост потребляемой мощности Q 2  , соответственно большая реактивная мощность течет и по линии. Это вызывает увеличение потерь напряжения в конце линии ∆ U 12
, соответственно большая реактивная мощность течет и по линии. Это вызывает увеличение потерь напряжения в конце линии ∆ U 12  , следовательно, уменьшается напряжение в конце линии у потребителя. В соответствии со статической характеристикой U U кр Q 2 снова растет. Это приводит к дополнительному понижению U 2 и т.д. Возникает явление, называемое лавиной напряжения. При такой аварии останавливаются (опрокидываются) асинхронные двигатели. Реактивная мощность асинхронных двигателей растет, баланс Q нарушается, что в свою очередь приводит к понижению напряжения. Остановить снижение напряжения при этой аварии, можно лишь отключив нагрузку. В настоящее время применяются автоматические регуляторы возбуждения (АРВ) на генераторах и мощных синхронных двигателях, стабилизирующее напряжение, поэтому напряжение в системе не понижается ниже критического.
, следовательно, уменьшается напряжение в конце линии у потребителя. В соответствии со статической характеристикой U U кр Q 2 снова растет. Это приводит к дополнительному понижению U 2 и т.д. Возникает явление, называемое лавиной напряжения. При такой аварии останавливаются (опрокидываются) асинхронные двигатели. Реактивная мощность асинхронных двигателей растет, баланс Q нарушается, что в свою очередь приводит к понижению напряжения. Остановить снижение напряжения при этой аварии, можно лишь отключив нагрузку. В настоящее время применяются автоматические регуляторы возбуждения (АРВ) на генераторах и мощных синхронных двигателях, стабилизирующее напряжение, поэтому напряжение в системе не понижается ниже критического.
1. Запишите и поясните уравнение баланса активной мощности.
2. Какова величина потерь активной мощности в электрической сети?
3. Какова величина мощности собственных нужд электростанций?
4. Какова причина изменения частота в ЭЭС?
5. Каковы нормально и предельно допустимые отклонения частоты в ЭЭС?
6. Что такое статическое и астатическое регулирование частоты?
7. Какие коэффициенты статизма имеют реальные регуляторы частоты?
8. Что такое первичное и вторичное регулирование частоты?
9. Какие станции называются балансирующими по частоте?
10. Каков критерий оптимального распределения активной мощности между агрегатами электростанции?
11. Запишите и поясните уравнение баланса реактивной мощности.
12. Дайте характеристику составляющим уравнения баланса реактивной мощности.
13. Назовите источники реактивной мощности.
14. Какова величина потерь реактивной мощности в линиях?
15. Какова величина потерь реактивной мощности в трансформаторах?
16. Какие известны показатели качества электрической энергии?
17. Каким показателем оценивается качество частоты?
18. Какими показателями оценивается качество напряжения?
19. Что понимают под отклонением напряжения и каковы причины его появления?
20. Как влияет отклонение напряжения на работу электроприемников?
21. Каковы верхние пределы допустимых отклонений напряжения в сетях 35 – 750 кВ?
22. Что понимают под колебанием напряжения, каковы причины его появления?
23. Как количественно оценивается колебание напряжения?
24. По каким причинам возникает не синусоидальность напряжения? Каковы отрицательные последствия ее появления?
25. Как количественно оценивается не синусоидальность напряжения?
26. Каковы причины появления не симметрии напряжений и отрицательные последствия ее появления?
27. Какими количественными показателями оценивается не симметрия напряжения?
28. Что понимают под провалом напряжения?
29. Как определить диапазон изменения мощности при регулировании частоты?
30. Как влияет крутизна частотной характеристики элементов системы на регулирование частоты?
31. Каковы возможные причины и последствия понижения частоты в энергосистеме?
32. Каковы особенности поведения станции при отсутствии резерва мощности?
33. Каким образом классифицируют изменения частоты в энергосистеме?
Баланс активных и реактивных мощностей
Активная мощность источников (турбогенераторов и гидрогенераторов электростанций, нетрадиционных источников, гидроаккумулирующих станций и др.) в любой момент времени соответствует потребляемой мощности (нагрузке) ΣPн:
где ΣPи – суммарная активная мощность источников; ΣРсн – собственные нужды генерирующих источников; ΔРп – потери активной мощности.
Приведенное уравнение определяет баланс активных мощностей в электрической системе.
Баланс активных мощностей соответствует определенным значениям частоты и напряжения в узлах, к которым подключены потребители (нагрузки). Изменение мощности источников связано с изменением частоты и напряжения очевидным равенством, получающимся разложением в ряд Тейлора функции ΣРн = F(f; U):
При нарушении баланса мощностей вследствие снижения генерирующей мощности или увеличения потребления активной мощности устанавливается режим с изменившимися значениями составляющих уравнения баланса мощности. Снижение генерируемой мощности приводит к уменьшению частоты и напряжения в системе и, наоборот, с увеличением мощности источников возрастают частоты тока и напряжения одинаково в любом узле электрической системы. Воздействовать на изменение частоты можно только изменением генерируемой активной мощности. На тепловых и гидравлических электростанциях это достигается увеличением или уменьшением выпуска энергоносителя, т. е. пара или воды.
Номинальное значение частоты в европейских странах составляет 50 Гц, в США и ряде других стран – 60 Гц. Снижение частоты приводит к уменьшению скорости вращения синхронных и асинхронных электродвигателей и, в конечном счете, к уменьшению производительности приводных механизмов.
В ориентировочных расчетах принимают, что изменение частоты на 1 % приводит к изменению активной мощности нагрузки на 0,5 %. Уравнение баланса реактивной мощности:
где ΣQг, ΣQc, ΣQк – реактивная мощность, генерируемая генераторами электростанций, компенсирующими устройствами (синхронными компенсаторами, конденсаторами и другими устройствами, а также емкостями воздушных и кабельных линий); ΣQн + ΣQсн + ΣΔQп – реактивная мощность, потребляемая нагрузками, а также собственными нуждами электроснабжения и обусловленная потерями в элементах систем электроснабжения.
Реактивная или обменная мощность существенно влияет на такие параметры систем электроснабжения, как потери мощности и энергии и уровни напряжения в узлах сети. Поэтому вопрос компенсации реактивной мощности относится к числу важнейших при проектировании и эксплуатации систем энергоснабжения предприятий. Как известно, величина (значение) реактивной мощности характеризует скорость обмена электромагнитной энергии источниками и потребителями электроэнергии. При этом индуктивные элементы являются накопителями реактивной мощности, а емкостные – ее генераторами. В трехфазных симметричных сетях реактивная мощность определяется как
в несимметричных сетях – суммой реактивных мощностей трех фаз:
Полная (кажущаяся) мощность
S = √P 2 + Q 2 , (15.6)
Q / P =tgφ; P / S = cosφ
Приведенные выше формулы справедливы для сетей синусоидального тока, в которых нет высших гармоник.
Напомним основные формулы, которые используются в расчетах, связанных с реактивной мощностью. Потери активной мощности ΔР при передаче активной и реактивной мощностей по линии с сопротивлением R:
∆P = (P 2 +Q 2 / U 2 ) ∙ R. (15.7)
где X – реактивное сопротивление линии.
При несинусоидальности напряжения и токов используется метод эквивалентных синусоид. Эквивалентные синусоиды напряжения Uэ и тока Iэ определяют по формулам:
где Uv и Iv – соответственно напряжение и ток v-й гармоники. Реактивная мощность
При расчетах реактивной мощности вентильных преобразователей коэффициент мощности определяют по формуле
значение cosφ1 находят по первым (основным) гармоникам напряжения и тока. Коэффициент искажения кривых тока
Обменные электромагнитные процессы можно рассматривать на основе разложения тока на составляющие: активную Iа, совпадающую по фазе с напряжением, и реактивную Ip, сдвинутую на угол π/2 (рис. 15.1):
 |
| Рисунок 15.1 — Составляющие полного тока |
Очевидно, что составляющая Iа обусловливает активную мощность, а Iр – реактивную:
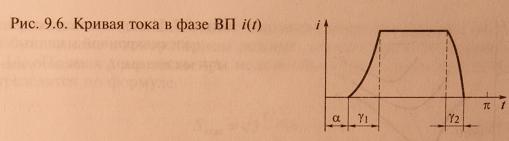
Этот подход удобен для понимания сущности энергетических процессов в системах электроснабжения с нелинейными нагрузками. В этом случае даже при отсутствии в сети реактивных элементов может иметь место Iр ≠ 0. Например, в простейшем случае одно- или двухполупериодного выпрямителя, работающего на активную нагрузку (рис. 15.2, а), при угле управления α ≠ 0 первая гармоника тока I1 сдвинута относительно кривой напряжения на угол φ1, значение которого зависит от угла управления α (рис. 15.2, б).
 |
| Рисунок 15.2 — Схема одно- или двухполупериодных выпрямителей, работающих на активную нагрузку (а) и сдвиг первой гармонии при α ≠ 0 (б) |
Ток первой гармоники может быть представлен суммой активной и реактивной составляющих по выражению (15.14), соответственно могут быть представлены мощности по выражениям (15.15а). Однако мощность, определяемая выражением (15.15б), не связана с обменными процессами, она обусловлена лишь наличием сдвига по фазе между током и напряжением. Ее правильнее было бы назвать мощностью сдвига. В дальнейшем изложении, однако, мы будем пользоваться привычным и общепринятым термином «реактивная мощность» вне зависимости от причины, вызывающей появление реактивной составляющей тока.
Отметим весьма важное обстоятельство: компенсация реактивной мощности (т. е. ее минимизация) производится одними и теми же методами вне зависимости от природы ее появления, т. е. наличия реактивных элементов в сети или сдвига фаз, обусловленного нелинейными потребителями. На практике обычно имеет место сочетание обеих причин: в вентильных преобразователях (выпрямителях, инверторах и др.) используются реакторы для сглаживания коммутационных процессов и батареи конденсаторов; преобразователи и ДСП включаются через трансформаторы и т. д.
Следует иметь в виду, что более точно коэффициент мощности cos φ следовало бы назвать коэффициентом сдвига фаз.
Согласно второму закону электромеханики все электрические машины обратимы, т. е. они могут работать как в двигательном, так и в генераторном режимах. Это свойство электрических машин используется, в частности, на гидроаккумуляторных станциях: синхронная машина используется в качестве двигателя при перекачке воды в резервуары в периоды минимальных нагрузок энергосистемы и в генераторном режиме, когда запасенная потенциальная энергия воды используется для вращения гидротурбины.
Синхронные машины, применяемые в промышленных системах электроснабжения, вне зависимости от их основного назначения (электродвигатели, генераторы) используются также в качестве источников реактивной мощности РМ. Синхронные компенсаторы устанавливают исключительно с целью получения РМ. Естественно, что эти машины могут работать также в режиме потребления РМ. Это можно наглядно продемонстрировать с помощью известных U-образных характеристик. На рис. 15.3 представлены U-образные характеристики синхронного генератора, подключенного к электрической сети с неизменным уровнем напряжения U0 = const при различных значениях активной нагрузки Р = 0, Р’, Р» (I – ток статора; If – ток возбуждения).
 |
| Рисунок 15.3 — U-образные характеристики синхронного генератора (U0 = const, активная нагрузка Р = 0, Р’, Р») |
При значениях тока возбуждения, меньших граничного (If Ifгр) она является источником реактивной мощности, т. е. «ведет себя» как емкость.
Для синхронных электродвигателей значения Р, Р’, Р» являются электромагнитной мощностью, соответствующей вращающему электромагнитному моменту. Нижняя кривая – U-образная характеристика синхронного компенсатора.
Синхронные компенсаторы, в отличие от синхронных генераторов, не имеют выходного конца вала, это облегчает герметизацию машины и позволяет использовать водородное охлаждение. Компенсаторы выпускают на напряжения 6,6–15,75 кВ и мощностью до 345 МВА.
Полная номинальная мощность компенсатора при работе с перевозбуждением, в генераторном режиме, определяется по формуле
Полная мощность при недовозбуждении (потребляемая)
Значение синхронного индуктивного сопротивления синхронного компенсатора (в относительных единицах) Xd= 1,8–5–2,5.
Активная мощность, обусловленная наличием механических потерь, а также потерь в стали и меди, составляет 1–2 % номинальной мощности.
Синхронные компенсаторы иногда применяют на главных понизительных подстанциях (ГПП) предприятий.
Баланс активных и реактивных мощностей

Активная мощность источников РИ (турбогенераторов и гидрогенераторов электростанций, нетрадиционных источников, гидроаккумулирующих станций и др.) в любой момент времени соответствует потребляемой мощности.
Приведенное уравнение определяет баланс активных мощностей в электрической системе.
Баланс активных мощностей соответствует определенным значениям частоты и напряжения в узлах, к которым подключены потребители (нагрузки). Изменение мощности источников связано с изменением частоты и напряжения очевидным равенством, получающимся разложением в ряд Тейлора функции:

При нагружении баланса мощностей вследствие снижения генерирующей мощности или увеличения потребления активной мощности устанавливается режим с изменившимися значениями составляющих уравнения баланса мощности. Снижение генерируемой мощности приводит к уменьшению частоты и напряжения в системе и, наоборот, увеличение мощности источников приводит к возрастанию частоты тока и напряжения в электрической системе одинаково в любом ее узле. Воздействовать на изменение частоты можно только путем изменения генерируемой активной мощности.
Номинальное значение частоты в европейских странах составляет 50 Гц, в США и ряде других стран — 60 Гц. Снижение частоты приводит к уменьшению скорости вращения синхронных и асинхронных электродвигателей и, в конечном счете, к уменьшению производительности приводных механизмов. В ориентировочных расчетах принимают, что изменение частоты на 1 % приводит к изменению активной мощности нагрузки на 0,5 %.
Баланс реактивной мощности определяется уравнением

Вопрос компенсации реактивной мощности относится к числу важнейших при проектировании и эксплуатации систем энергоснабжения предприятий. Как известно, величина (значение) реактивной мощности характеризует скорость обмена электромагнитной энергии источниками и потребителями электроэнергии. При этом индуктивные элементы являются накопителями реактивной мощности, а емкостные — ее генераторами.
В трехфазных симметричных сетях реактивная мощность определяется по формуле
В простейшем случае одно или двухполупериодного выпрямителя, работающего на активную нагрузку (рис. 9.6), при угле управления а * 0 первая гармоника тока 1 сдвинута относительно кривой напряжения на угол фь значение которого зависит от угла управления а. ток первой гармоники может быть представлен суммой активной и реактивной составляющих; соответственно могут быть представлены мощности. Однако такая мощность не связана с обменными процессами, она обусловлена лишь наличием сдвига по фазе между током и напряжением. Ее правильнее было бы назвать мощностью сдвига. Но мы будем пользоваться привычным и общепринятым термином «реактивная мощность».
Компенсация реактивной мощности (т.е. ее минимизация) производится одними и теми же методами независимо от природы ее появления, т.е. наличия реактивных элементов в сети или сдвига фаз, обусловленного нелинейными потребителями. На практике обычно имеют место сочетания обоих причин: в вентильных преобразователях (выпрямителях, инверторах и др.) используются реакторы для сглаживания коммутационных процессов и батареи конденсаторов; преобразователи и ДСП включаются через трансформаторы и т.д. Говоря о коэффициенте мощности coscp, следует иметь в виду, что более точно его следовало бы назвать коэффициентом сдвига фаз.
Согласно первой научной картине мира Ньютона—Максвелла все электрические машины обратимы, т.е. они могут работать как в двигательном, так и в генераторном режимах. Это свойство электрических машин используется, в частности, на гидроаккумуляторных станциях: синхронная машина используется в качестве двигателя при перекачке воды в резервуары в периоды минимальных нагрузок энергосистемы и в генераторном режиме, когда запасенная потенциальная энергия воды используется для вращения гидротурбины.
Синхронные машины, применяемые в промышленных системах электроснабжения, независимо от их основного назначения (электродвигатели, генераторы) используются также в качестве источников реактивной мощности. Синхронные компенсаторы устанавливаются только в целях получения РМ. Эти машины могут также работать в режиме потребления РМ.
Это можно наглядно продемонстрировать с помощью известных Uобразных характеристик. На рис. 9.7 представлены Uобразные характеристики синхронного генератора, подключенного к электрической сети с неизменным уровнем напряжения сУ0 = const при различных значениях активной нагрузки Р = 0; Р’ Р».
При значениях тока возбуждения меньших граничного (IF IFRP) — является источником реактивной мощности, т. е. ведет себя как емкость.
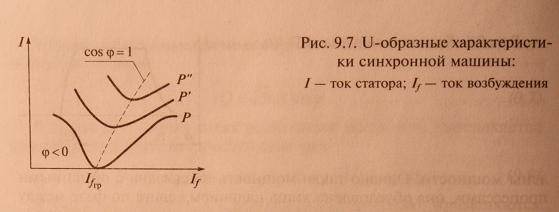
Для синхронных электродвигателей значения Р] Р’Р» являются электромагнитной мощностью, соответствующей вращающему электромагнитному моменту. Нижняя кривая является Uобразной характеристикой синхронного компенсатора.
Турбогенераторы небольшой мощности (обычно до 50 MBА) применяются на электростанциях (блокстанциях) предприятий, которые либо являются автономными, либо подключаются к сетям энергосистемы. Используются теплофикационные турбины с отбором пара для промышленных нужд. В любом режиме работы нагрузка турбогенератора ограничивается номинальной мощностью S*ном:

В режиме работы с номинального значения коэффициента мощностиcos φда 0,80…0,85, что соответствует значениямгенерируемой реактивной мощности QT «(0,53…0,60)» УНОМ.
Оценить значение располагаемой реактивной мощности в режимах, отличных от номинального, очень затруднительно. Так, при увеличении значения Qr по сравнению с номинальным (путем увеличения тока возбуждения If) во избежание перегрева ротора должна быть снижена полная мощность. Кратность снижения этой величины зависит от вида охлаждения (воздушное, водородное), конструкции ротора и ряда других параметров. Как правило, для окончательного решения этого вопроса следует обратиться к паспорту машины либо результатам тепловых испытаний.
При отсутствии возбуждения (I/ = 0), например при включении автомата гашения поля (АГП), турбогенератор будет работать в асинхронном режиме, который, как правило, допустим лишь кратковременно. На промышленных предприятиях турбогенераторы для регулирования напряжения и реактивной мощности используются редко.
Синхронные компенсаторы, в отличие от синхронных генераторов, не имеют выходного конца вала, что облегчает герметизацию машины и позволяет использовать водородное охлаждение. Компенсаторы строятся на напряжения 6,6—15,75 кВ, мощностью до 345 MBА. В промышленности распространены СК10000 кВА.
Полная номинальная мощность компенсатора при работе с перевозбуждением, в генераторном режиме, определяется по формуле (9.14). Полная мощность при недовозбуждении (потребляемая)
определятся по формуле

Значение синхронного индуктивного сопротивления синхронного компенсатора (в относительных единицах) х% = 1,8…2,5. Активная мощность, обусловленная наличием механических потерь, а также потерь в стали и меди, составляет 1… 2 % от номинальной мощности. Синхронные компенсаторы иногда применяются на ГПП предприятий.
http://helpiks.org/7-1256.html
http://pue8.ru/reaktivnaya-moshchnost/55-balans-aktivnyh-i-reaktivnyh-moschnostey.html