Теоретические основи радиолокации
Уравнение дальности радиолокации
Уравнение дальности радиолокации (часто для краткости – уравнение радиолокации ) в простой и наглядной форме связывает между собой максимальную дальность действия радиолокатора, его параметры, а также параметры цели. В зависимости от требуемого результата уравнение радиолокации может быть записано относительно максимальной дальности действия радиолокатора или относительно мощности электромагнитной волны на входе приемной антенны. Во втором случае мощность Pe у приемной антенны радиолокатора выражается зависимостью от излучаемой мощности PS , дальности цели R и отражающих характеристик цели, описываемых ее эффективной поверхностью рассеяния σ . Если известна чувствительность радиолокационного приемника, то с помощью уравнения радиолокации можно определить максимальную теоретически достижимую дальность действия радиолокатора. Таким образом, уравнение радиолокации может использоваться для оценки тактико-технических характеристик радиолокатора.
Вывод уравнения радиолокации
Прежде всего предположим, что распространение радиоволн происходит в идеальных условиях, то есть без потерь.

Рисунок 1. Плотность мощности, излучаемая ненаправленным излучателем, уменьшается при геометрическом расширении луча (при удалении от излучателя)


Рисунок 1. Плотность мощности, излучаемая ненаправленным излучателем, уменьшается при геометрическом расширении луча (при удалении от излучателя)
Если высокочастотная энергия излучается изотропным излучателем, то она распространяется равномерно во всех направлениях. Следовательно, поверхности с одинаковой плотностью мощности представляют собой сферы, площадь которых в зависимости от расстояния от излучателя определяется как ( A= 4 π R² ) . Одно и то же количество энергии с увеличением радиуса сферы распределяется на все большую площадь ее поверхности. Это означает, что плотность мощности электромагнитной волны на поверхности сферы обратно пропорциональна квадрату радиуса сферы. Таким образом, можно записать уравнение для вычисления плотности мощности Su , излучаемой ненаправленным излучателем
.print.png)
.png)
- PS = излучаемая мощность [Вт]
- R1 = расстояние от передающей антенны до цели [м]

Рисунок 2: Усиление антенны, умноженное на плотность мощности, дает направленную плотность мощности.

Рисунок 2: Усиление антенны, умноженное на плотность мощности, дает направленную плотность мощности.
Если же передающая антенна является направленной, то это приводит к увеличению плотности мощности, излучаемой в определенном направлении. Этот эффект называют усилением антенны. Таким образом, выражение для плотности мощности направленного излучателя Sg можно записать в виде
.print.png)
.png)
- G = коэффициент усиления антенны.
Конечно, в действительности антенны радиолокаторов не являются «частично излучающими» изотропными излучателями. К антеннам радиолокаторов предъявляют требования малой ширины луча и коэффициента усиления на уровне 30 или 40 дБ (например, зеркальная параболическая антенна или фазированная антенная решетка).
Обнаружение цели зависит не только от плотности мощности в районе цели, а также от того, какая часть этой мощности отражается в направлении на радиолокатор. Для того, чтобы определить полезную отраженную мощность, необходимо знать эффективную поверхность рассеяния σ цели. Ее значение зависит от многих факторов, однако можно утверждать, что цель с большей площадью отражает больше мощности, чем цель с меньшей площадью. Это означает, что, при одинаковых условиях наблюдения пассажирский авиалайнер обладает большей площадью рассеяния, чем спортивный самолет.
Из приведенного выше следует, что отраженная от цели мощность Pr зависит от плотности мощности Su , коэффициента усиления антенны G и изменяющейся эффективной поверхности рассеяния σ :
.print.png)
.png)
У упрощенном виде цель может рассматриваться как излучатель. При таком подходе отраженная мощность Pr рассматривается как излученная мощность.
Применив к отраженной мощности те же рассуждения, что и к излученной, по аналогии с формулой (1), можем записать выражение для плотности мощности Se у приемной антенны:

Рисунок 3. Связь между выражениями (3) и (4)
.print.png)
.png)
- R2 = расстояние между целью и приемной антенной.
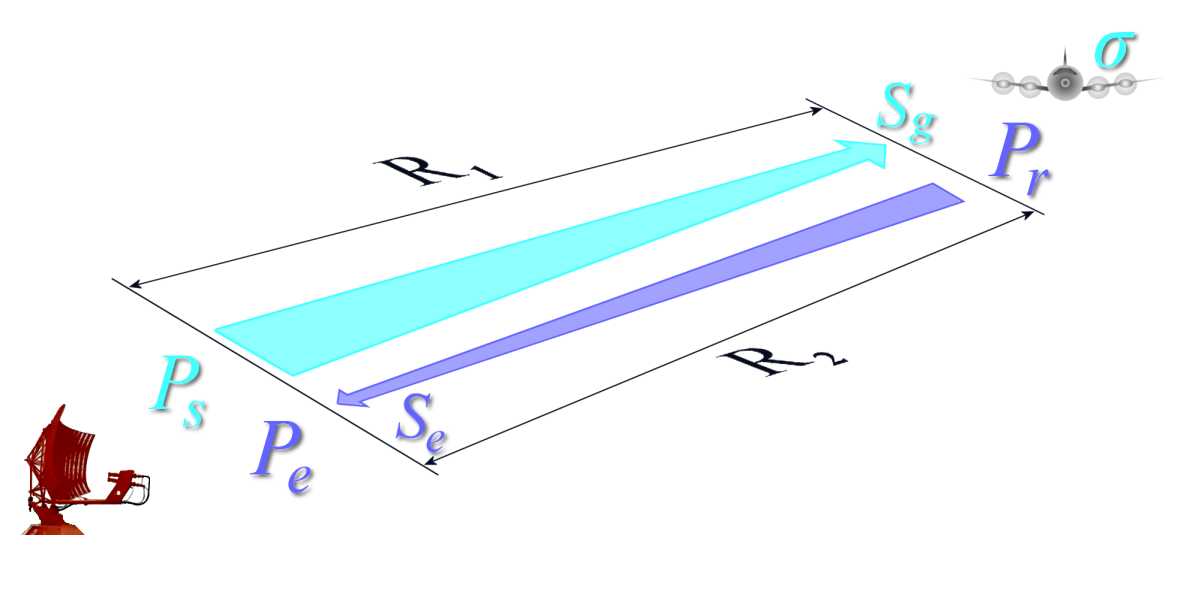
Рисунок 3. Связь между выражениями (3) и (4)
Принятая в приемной антенне мощность Pe зависит от плотности мощности в точке приема Se и эффективной площади антенны AW .
Очевидно, что значение эффективной площади антенны характеризует ту часть мощности, которую антенна может «собрать» из всего потока мощности, отраженной от цели. Чем больше площадь антенны, тем больше мощности она может на себя «собрать». Кроме того, этот параметр обусловлен наличием потерь в антенне. По этой причине принятая антенной мощность не равна падающей на нее мощности. Эффективность антенны количественно описывают при помощи коэффициента эффективности Ka , значение которого для реальных антенн, как правило, составляет около 0,6 … 0,7.
Коэффициент эффективности антенны связывает между собой ее геометрическую и эффективную площадь, то есть
- A = геометрическая площадь антенны [м²]
С учетом введенных величин выражение для принятой мощности Pe может быть записано в виде:
.png)
.print.png)
В приведенных выше выражениях излученная и отраженная волны рассматривались по отдельности. Следующим шагом является получение выражения, связывающего их параметры вместе. Для этого подставим выражение для отраженной мощности (3) в формулу для принятой мощности (8). В дальнейшем учтем, что для случая совмещенного радиолокатора R1 = R2 .
.png)
.print.png)
Коэффициент усиления антенны G может быть выражен через длину волны λ . Не приводя здесь вывода этого выражения, запишем окончательную формулу:
.print.png)
.png)
Выразив из (10) геометрическую площадь антенны А и подставив полученное выражение в (9), после упрощения получим:
.print.png)
.png)
Решая полученное уравнение относительно дальности цели R , мы получим классическое уравнение дальности радиолокации:
.print.png)
.png)
В полученном уравнении учитываются все величины, оказывающие влияние на распространение радиолокационных сигналов. Перед тем, как попробовать применить уравнение радиолокации на практике, например, для оценки эффективности радиолокатора, необходимо привести некоторые дополнительные соображения.
Для конкретного радиолокатора большинство параметров (в частности, Ps, G, λ ) можно считать постоянными, поскольку их значения изменяются в небольших пределах. С другой стороны, эффективная поверхность рассеяния изменяется достаточно сильно. Однако, для практических задач ее часто полагают равной 1 м².
Наименьшую принимаемую мощность, при которой отраженный сигнал может быть обнаружен, обозначают PEmin . Сигналы меньшей, чем PEmin мощности, не могут использоваться, поскольку они будут потеряны в шумах приемника. Поэтому PEmin еще называют чувствительностью приемника. Значение PEmin определяет максимальную дальность действия Rmax радиолокатора:
.print.png)
.png)
Использование этого уравнения радиолокации позволяет легко объяснить влияние той или иной характеристики радиолокатора на дальность его действия.
Учет потерь
Приведенный выше вывод уравнения радиолокации выполнен в предположении идеальных условий распространения электромагнитных волн, то есть распространения без потерь. В реальности необходимо учитывать разнообразные потери, поскольку они могут существенно влиять на эффективность радиолокатора. С этой целью уравнение радиолокации дополняется коэффициентом потерь Lges .
.print.png)
.png)
Этот коэффициент учитывает следующие потери:
- L D = внутренние потери в передающем и приемном трактах радиолокатора;
- L f = флуктуационные потери во время отражения от цели;
- L Atm = атмосферные потери – потери на поглощение электромагнитных волн при распространении их в атмосфере от радиолокатора до цели и обратно.
В высокочастотных компонентах радиолокатора, таких как волноводы, фильтры, а также в антенных обтекателях также возникают внутренние потери. Для конкретного радиолокатора эти потери относительно постоянны и могут быть легко измерены.
Атмосферное ослабление и отражение от поверхности Земли являются постоянными факторами.
Влияние Земной поверхности
Расширенная, однако реже используемая, форма записи уравнения радиолокации учитывает дополнительные факторы, такие как поверхность Земли, однако не учитывает чувствительность приемника и атмосферное ослабление.


В этом выражении, помимо уже известных величин, появляются следующие:
- Kα – коэффициент потерь вместо Lges.;
- Az – эффективная поверхность отражения вместо σ;
- ti – длительность импульса;
- nR – коэффициент шума приемника;
- d – коэффициент четкости экрана индикаторного устройства;
- Re – толщина слоя поглощающей среды;
- γ – угол отражения луча;
- K – постоянная Больцмана;
- T0 – абсолютная температура в К;
- δR – коэффициент ослабления в поглощающей среде.
Отражение от плоской земной поверхности
Геометрическое представление (Рисунок 3) поясняет влияние поверхности Земли. Плоскость Земли вблизи антенны радиолокатора оказывает существенное влияние на диаграмму направленности антенны в вертикальной плоскости. Взаимодействие прямой и переотраженной от поверхности грунта волн изменяет диаграмму направленности антенны на передачу и на прием. Это влияние значительно в диапазоне очень высоких частот (ОВЧ, VHF), к которому относятся частоты 30 … 300 МГц. С увеличением частоты такое влияние уменьшается. Для обнаружения маловысотных целей использование отражения от земной поверхности является необходимым. Однако это возможно, только если размеры неровностей поверхности в первой зоне Френеля (радиуса RF ) относительно антенны не превышают значения 0,001· RF (то есть, если радиус первой зоны Френеля RF = 1000 м, то на этом расстоянии от антенны радиолокатора не должно быть неровностей больше 1 м!).

Рисунок 4. Геометрия отражений от земной поверхности

Рисунок 4. Геометрия отражений от земной поверхности
Специализированные радиолокаторы, работающие в диапазоне ОВЧ (VHF), используют отражение от земной поверхности для увеличения дальности действия на малых высотах. На больших высотах влияние этого отражения приводит к нежелательным эффектам, а именно, к изрезанности зоны обзора в вертикальной плоскости. На Рисунке 4 показано изменение формы диаграммы направленности антенны под влиянием отражения от земной поверхности. Изрезанность зоны обзора приводит к пропаданию сигнала от цели во время ее нахождения между лепестками. Указанный эффект использовался в наземных радиолокаторах управления воздушным движением, при этом лучшие результаты наблюдались на более низких частотах, где лепестки получались довольно широкими и обеспечивали достаточное покрытие на больших высотах. С увеличением рабочей частоты радиолокатора влияние отражения от земной поверхности на форму диаграммы направленности антенны в вертикальной плоскости ослабевает.

Рисунок 5. Диаграмма направленности антенны в вертикальной плоскости с учетом влияния отражений от земной поверхности.
Рисунок 5. Диаграмма направленности антенны в вертикальной плоскости с учетом влияния отражений от земной поверхности.

Рисунок 5. Диаграмма направленности антенны в вертикальной плоскости с учетом влияния отражений от земной поверхности.
Увеличение высоты антенны приводит к тому, что количество лепестков увеличивается и они становятся более узкими, тем самым уменьшается количество пропаданий сигнала от цели, двигающейся на постоянной высоте. Однако вместе с этим, увеличение высоты антенны приводит к увеличению размеров первой зоны Френеля, то есть зоны, существенной для формирования диаграммы направленности антенны. А это, в свою очередь, ужесточает требования к позиции радиолокатора.
Таким образом, отражение от земной поверхности может оказывать как позитивное, так и негативное влияние на эффективность функционирования радиолокатора. Степень этого влияния зависит от многих факторов, таких как длина волны, высота подъема антенны, наличие и размер неровностей поверхности позиции на расстоянии, соответствующем первой зоне Френеля. Отсюда следует, что для конкретного радиолокатора, когда на первые два фактора влиять не представляется возможным, особое значение приобретает выбор и подготовка позиции.
Издатель: Кристиан Вольф, Автор: Андрій Музиченко
Текст доступен на условиях лицензий: GNU Free Documentation License
а также Creative Commons Attribution-Share Alike 3.0 Unported License,
могут применяться дополнительные условия.
(Онлайн с ноября 1998 года)
Конвертер величин

Калькулятор максимальной дальности действия РЛС

Этот калькулятор определяет теоретическую максимальную дальность действия РЛС по мощности передатчика, коэффициенту усиления или эффективной площади антенны, эффективной площади рассеяния цели и чувствительности приемного тракта РЛС. «Теоретическая» означает, что при расчете не учитываются характеристики среды, а также интерференция электромагнитных волн, отраженных от земной поверхности и окружающих предметов. Этот и другие калькуляторы на TranslatorsCafe.com пригодятся не только инженерам и студентам технических специальностей, но и всем, кто хочет изучить технический английский, так как все они есть и в английской версии.
Пример: Рассчитать максимальную дальность действия радиолокационной станции (РЛС), если она имеет следующие характеристики: мощность в импульсе 58 МВт, эффективная площадь антенны 13 кв. м, частота 3,3 ГГц, эффективная площадь рассеяния (ЭПР) цели 0,03 кв. м, минимальная мощность сигнала на входе приемника РЛС 5×10 –12 Вт.
Для расчета введите величины в соответствующие поля, выберите британские или метрические единицы и нажмите на кнопку Рассчитать
Мощность отраженного от цели сигнала Pr на приемной антенне определяется по формуле:

Gt — коэффициент усиления передающей антенны,
Pt — мощность излученного сигнала,
σ — эффективная площадь рассеяния цели,
F коэффициент потерь при распространении сигнала; в вакууме и без помех этот коэффициент равен 1,
Rt — расстояние от передающей антенны до цели,
Rr расстояние от цели до приемной антенны,
![]()
Ar — эффективная площадь антенны.
Эффективная площадь приемной антенны можно выразить как

где λ — длина волны передаваемого сигнала, Gr — коэффициент усиления приемной антенны. Поскольку f = c/ λ, имеем:

Если для передачи и приема используется одна и та же антенна, то Rt = Rr и произведение Rt ² Rr ² можно заменить дальностью действия R 4 . Получаем:

![]()

Решая это уравнение относительно дальности действия РЛС R, получаем классическую форму основного уравнения радиолокации:

Если для передачи и приема используется одна и та же антенна, то Gt = Gr = G. Тогда

или для вакуума и отсутствия интерференции, когда коэффициент потерь при распространении сигнала F = 1:

Эта формула и используется в нашем калькуляторе. Ее можно переписать для длины волны вместо частоты:

Максимальная дальность действия РЛС достигается в том случае, когда РЛС обнаруживает сигнал минимальной мощности на входе приемника Pr = Pmin, которая ограничивается собственными шумами приемного тракта.
Приведенная выше формула была выведена для идеальных условий — распространения радиоволн в вакууме и без помех. В реальных условиях всегда имеются потери, которые ухудшают эффективность работы РЛС. В частности, это потери вследствие поглощения радиоволн в атмосфере, многолучевого распространения радиоволн и других факторов, влияющих на эффективность работы радиолокационной системы.
![]()
Факторы, влияющие на характеристики и эффективность работы РЛС
Эффективность работы РЛС можно оценить по следующим факторам:
- максимальная дальность действия,
- точность измерения расстояния до цели и ее азимута,
- возможность различения нескольких целей,
- возможность обнаружения отраженного от цели сигнала при наличии помех от местных предметов, мешающих сигналов и в условиях применения противником средств радиоэлектронного подавления (РЭП),
- боевая и эксплуатационная готовность, надежность и ремонтопригодность радиолокационного оборудования
Здесь мы кратко рассмотрим основные факторы, которые влияют на эффективность работы радиолокационной системы. Мы увидим, что выбор параметров любой радиоэлектронной системы — это всегда компромисс.
Несущая частота радиопередатчика
Более высокие частоты увеличивают разрешающую способность при обнаружении целей, позволяют обнаруживать цели меньшего размера и использовать антенны меньшего размера. В то же время, с увеличением частоты увеличивается затухание сигнала, а значит и максимальная дальность действия радиолокационной системы.
Импульсная мощность
Приведенное выше основное уравнение радиолокации показывает, что дальность действия РЛС увеличивается при увеличении мощности в импульсе. Простой расчет показывает, что при удвоении мощности в импульсе дальность действия увеличивается на 25%. В то же время, это приводит к тому, что для увеличения дальности приходится использовать оборудование большего размера и большей мощности.
Физические размеры антенны
![]()
То же уравнение показывает, что точность и дальность действия РЛС зависит от коэффициента усиления и эффективной площади антенны, которые, в свою очередь, зависят от физических размеров антенны. Иногда стационарные антенны РЛС бывают очень большими. Например, антенны загоризонтных РЛС декаметрового диапазона имеют длину более километра. Параболические полноповоротные антенны диаметром и более 70 м тоже не являются чем-то необычным. Однако бывают ситуации, когда практический размер антенны ограничен. Например — в авиации.
Форма импульса
Импульсы, излучаемые радиолокационными станциями, должны иметь короткие фронты, чтобы обеспечить лучшую точность определения дальности до цели. В то же время, для обеспечения хорошей формы импульсов требуется более широкая полоса пропускания, а значит более сложное, дорогое и энергоемкое оборудование.
Длительность импульса
Чем больше длительность (ширина) импульса, тем больше дальность действия РЛС, потому что в каждом импульсе можно передать больше энергии. В то же время, короткие импульсы обеспечивают меньшее минимальную дальность действия и более высокую точность определения расстояния до цели.
![]()
Частота повторения импульсов
Временной интервал между соседними излученными импульсами определяет частоту повторения импульсов. Чем выше частота повторения импульсов, тем меньше максимальная дальность действия РЛС и тем лучше точность измерения дальности и разрешение по азимуту. Между двумя импульсами должно пройти достаточно времени, чтобы отраженный сигнал мог вернуться к цели и не был заблокирован следующим передаваемым импульсом.
Ширина диаграммы направленности антенны
Более узкий луч обеспечивает большую угловую точность и большую дальность действия РЛС. В то же время, сужение диаграммы направленности антенны приводит к уменьшения числа оборотов антенны, что, в свою очередь, приводит к увеличению времени обнаружения цели.
Чувствительность и шумовые характеристики приемного тракта РЛС
Чувствительность приемного тракта РЛС определяется шумом приемника. Более чувствительные приемники обеспечивают большую дальность действия. Однако для увеличения чувствительности требуется более сложное и дорогое оборудование.
Полоса пропускания приемного тракта РЛС
Приемник с более узкой полосой пропускания обеспечивает лучшее отношения сигнал-помеха. Однако такой приемник ухудшает форму импульса и, следовательно, точность РЛС.
Размер цели
Размер цели, видимый радиолокатору, называется эффективной площадью рассеяния цели. Обычно эта величина не связана с физическими размерами цели. Она зависит от геометрии цели, а также от того, насколько хорошо материал цели поглощает электромагнитную энергию радиоволн и превращает их в тепловую энергию.
![]()
Вас могут заинтересовать и другие калькуляторы из группы «Электротехнические и радиотехнические калькуляторы»:
Электротехнические и радиотехнические калькуляторы
Электроника — область физики и электротехники, изучающая методы конструирования и использования электронной аппаратуры и электронных схем, содержащих активные электронные элементы (диоды, транзисторы и интегральные микросхемы) и пассивные электронные элементы (резисторы, катушки индуктивности и конденсаторы), а также соединения между ними.
Радиотехника — инженерная дисциплина, изучающая проектирование и изготовление устройств, которые передают и принимают радиоволны в радиочастотной области спектра (от 3 кГц до 300 ГГц), также обрабатывают принимаемые и передаваемые сигналы. Примерами таких устройств являются радио- и телевизионные приемники, мобильные телефоны, маршрутизаторы, радиостанции, кредитные карточки, спутниковые приемники, компьютеры и другое оборудование, которое передает и принимает радиосигналы.
В этой части Конвертера физических единиц TranslatorsCafe.com представлена группа калькуляторов, выполняющих расчеты в различных областях электротехники, радиотехники и электроники.
На этих страницах размещены конвертеры единиц измерения, позволяющие быстро и точно перевести значения из одних единиц в другие, а также из одной системы единиц в другую. Конвертеры пригодятся инженерам, переводчикам и всем, кто работает с разными единицами измерения.
Мы работаем над обеспечением точности конвертеров и калькуляторов TranslatorsCafe.com, однако мы не можем гарантировать, что они не содержат ошибок и неточностей. Вся информация предоставляется «как есть», без каких-либо гарантий. Условия.
Если вы заметили неточность в расчётах или ошибку в тексте, или вам необходим другой конвертер для перевода из одной единицы измерения в другую, которого нет на нашем сайте — напишите нам!
Формулы для расчета максимальной дальности действия РЛС с учётом поглощений
Курсовая работа
Студент группы РР-4-07
Федеральное государственное бюджетное
высшего профессионального образования
«Московский государственный технический университет радиотехники, электроники и автоматики»
Кафедра радиотехнических устройств и систем
Группа РР-4-07 Вариант №6
Студент Хромченков Никита Васильевич
Задание на курсовую работу по дисциплине «Радиотехнические системы»
Тема курсовой: «РЛС кругового обзора»
1. Теоретически раскрыть тему курсовой работы:
А) Изобразить функциональную схему данной РЛС с кратким описанием;
Б) Дать определение основным параметрам данной системы, привести формулы для расчета практической части
2. Рассчитать показатели РЛС кругового обзора:
А) максимальную дальность с учетом поглощения;
Б) реальную разрешающую способность по дальности и азимуту;
В) реальную точность измерения дальности и азимута.
Исходные данные:
1. Длинна волны 8
2. Импульсная мощность 650
3. Длительность импульсов 2,7
4. Частота посылок импульсов 700
5. Горизонтальный размер зеркала антенны 7
6. Вертикальный размер зеркала антенны 2,5
7. Период обзора 30
8. Коэффициент шума приемника 5
9. Вероятность правильного обнаружения 0,9
10. Вероятность ложной тревоги 10 -5
11. Диаметр экрана индикатора кругового обзора 400
12. Эффективная отражающая площадь цели 25
13. Качество фокусировки 350
14. Предельное значение шкалы дальности 50
Предельное значение шкалы дальности 400
15. Измерительные метки дальности 15
16. Измерительные метки азимута 4
I. Теоретическая часть
Радиолокацией (РЛ) называется область науки и техники, объединяющая методы и технические средства обнаружения, измерения координат и параметров движения, а также определения некоторых характеристик различных объектов (радиолокационных целей), основанные на использовании радиоволн излучаемых, ретранслируемых или отражаемых (рассеиваемых) этими объектами. Процесс обнаружения объектов, измерение их координат и параметров движения называется радиолокационным наблюдение (иногда радиолокацией цели), а используемые для этого системы – радиолокационными станциями (РЛС), или радиолокаторами [1].
В зависимости от природы возникновения электромагнитных волн, достигающих антенны РЛС и доставляющих информацию об объектах радиолокационного наблюдения, различают активную, полуактивную, активную с активным ответом и пассивную радиолокацию .
Измерение координат обнаруженных целей основано на определении значений параметров радиолокационных сигналов, несущих информацию об этих целях. При этом используются следующие физические свойства радиоволн:
1. Скорость распространения радиоволн в свободном пространстве имеет конечное и приблизительно постоянное значение.
2. Траектории распространения радиоволн можно считать прямыми линиями.
3. Частота принимаемых электромагнитных колебаний отличается от частоты излученных колебаний в том случае, если цель перемещается относительно РЛС (Эффект Доплера) [3]
1.1 Функциональная схема и ее описание
Различают радиолокационные станции (РЛС), построенные по некогерентной и когерентной схемам. В первом случае случаи отдельные зондирующие импульсы некогерентны между собой, начальные фазы их несущих частот случайны, независимы между собой и равномерно распределены в интервале [-π; π], что делает невозможным синфазное суммирование пачки импульсов на радиочастоте. Решение об обнаружении отраженного целью сигнала в таких РЛС принимается на основе приема одиночного импульса, либо на основе приема пачки импульсов с суммированием после амплитудного детектирования.
Рассмотрим принцип действия и взаимодействие элементов некогерентной РЛС кругового обзора, структурная схема которой представлена в приложении 1.
Такие станции позволяют обнаружить цели, определять их дальность D и азимут α в процессе непрерывного обзора пространства вокруг станции, ограниченного максимальной дальностью РЛС D maxи шириной диаграммы направленности антенны (ДНА) по углу места β А. ДНА вращается с постоянной скоростью, осуществляя за время одного оборота Т0 круговой обзор по азимуту. Принимаемые приёмником РЛС сигналы, отраженные целями (Ц), с выхода приёмника подаются на управляющий электрод электронно-лучевой трубки (ЭЛТ) индикатора кругового обзора (ИКО), линия разверстки которого вращается синхронно с вращением ДНА. Момент излечения зондирующего импульса антенной (А) определяет начало развертки дальности, а азимутальное положение линии развёрстки совпадает с положением оси ДНА. Отражённый от цели сигнал после преобразования, усиления т детектирования в приемнике РЛС модулирует электронный луч ЭЛТ по интенсивности (яркости), подсвечивая точку развертки, соответствующую временной задержке сигнала от цели, т.е. её дальности.
Сигналы, отраженные от цели, поступают на вход приёмника в течение времени поворота ДНА на угол, равный её ширине α А по азимуту. За это время будет принята пачка импульсов, число которых 
определяется шириной ДНА α А , временем обзора Т0 и периодом повторения кодирующих импульсов Тη . Каждый из сигнальных импульсов подсвечивает точку на соответствующей линии развертки.
При приеме пачки импульсовN нач на экране ЭЛТ создается отметка цели в виде дужки с протяженностью по азимуту α А , середина которой соответствует азимуту цели α , а её расстояние от центра экрана (начала развертки) – дальности D. Таким образом, протяженность отметки на экране ИКО по азимуту определяется шириной ДНА α А (если размеры цели малы сравнительно с линейной шириной ДНА (α А D) и цель можно считать точечной), а протяженность по дальности (вдоль линии развертки) – скоростью развертки и длительностью принимаемого сигнала. Протяженность отметки целей на экране ИКО непосредственно связана с разрешающей способностью по дальности, азимуту (угловой разрешающей способностью) и скоростью развертки. Увеличение скорости развертки ИКО позволяет улучшить разрешающую способность РЛС, но при этом сокращаются пределы измеряемой дальности (шкалы дальности) индикатора, поэтому в ИКО предусматривается несколько шкал дальности, что позволяет обеспечить измерение дальности в заданных пределах и повысить четкость изображение на экране ИКО переходом на более крупный масштаб. Устройством, обеспечивающим согласованную работу во времени (синхронизацию) всех элементов РЛС, является синхронизатор (приложение 1), состоящий из высокостабильного опорного генератора (ОГ), колебания которого заданной частоты и формы (обычно синусоидальной) используются для формирования пусковых импульсов (ФПИ). Эти импульсы имеют требуемую частоту повторения F η и используются для запуска модулятора (М) и схемы развертки дальности (РД).
Импульсы модулятора определяют длительность τυ и частоту повторения Fn высокочастотных импульсов, формируемых генератором высокой частоты (ГВЧ), которые через антенный переключатель (АП) поступают к излучателю антенной системы, формирующей требуемую диаграмму направленности. На время излучения импульса АП блокирует вход приёмника, защищая его от воздействия мощных колебаний.
Радиосигнал, принятый от цели, усиливается усилителем высокой частоты (УВЧ) приёмника непосредственно на радиочастоте принимаемого сигнала fc, которая при наличии радиальной скорости цепи Vr отличается на величину допплеровского смещения :
Fv = ±fn 
От несущей частоты излучаемого импульса fn. Знак плюс соответствует приближению цели, а минус – ее удалению. Основное усиление сигнала осуществляется усилением промежуточной частоты (УПЧ) на частоте fпч. Переход на fпч осуществляется с помощью преобразователя, состоящего из смесителя (СМ) и гетеродина (Г). Применение автоматической подстройки частоты (АПЧ) гетеродина обеспечивает равенство частоты сигнала после смесителя fпч частоте настройки УПЧ fпч0. АПЧ необходима, поскольку обычно в РЛС кругового обзора в качестве ГВЧ используется магнетрон, обеспечивающий наиболее экономичный способ получения мощных высокочастотных колебаний в сантиметровом диапазоне радиоволн. Недостатком магнетронного генератора является недостаточная стабильность частоты генерируемых колебаний и их некогерентность от импульса к импульсу. Последнее и заставляет осуществлять подстройку частот гетеродина fг под частоту колебаний fи при излучении каждого импульса.
Блок автоматической регулировки усиления (АРУ) служит для задания уровня порогового сигнала при смене помеховой обстановки.
После детектирования импульсных радиосигналов детектором (Д) выделяются их огибающие, называемые обычно видеоимпульсами. После усиления видео усилителем (ВУ) эти импульсы подаются на управляющий электрод ЭЛТ (сетку или катод в зависимости от полярности импульсов), обеспечивая модуляцию электронного луча по интенсивности (яркости отметки на экране).
Радиально-круговая развертка, применяется в ИКО, формируется с помощью схем развертки по дальности (РД) и по азимуту (РА). Чаще всего в ИКО используют ЭЛТ с электромагнитным отклонением, поэтому для линейного отклонения луча ЭЛТ по радиусу схемой РД создается линейно возрастающий ток во взаимно перпендикулярных отклоняющихся катушках. Вращение ДНА достигается соответствующей модуляцией амплитуды этого тока с помощью схемы РА, управляемой от датчика положения диаграммы направленности антенны (ДПА).
В РЛС кругового обзора чаще всего используют антенны рефлекторного типа, в которых для формирования ДНА используется рефлектор параболической формы. Зондирующий сигнал подается на излучатель, размещаемый в фокусе отражателя. Возможно получить вращающуюся ДНА и при неподвижной антенной системе, состоящей из трех ФАР с электронным управлением ДНА. Однако этот способ формирования вращающейся ДНА сложнее и поэтому применяется значительно реже.
Для измерения дальности на экране ИКО формируются метки дальности в виде светящихся колец, расстояние между которыми зависит от периода повторения импульсов, формируемых схемой электронных меток (СЭМ). Специальной схемой формируются и электронные метки азимута в виде импульсов, подсвечивающих более ярко линии развертки через заданные интервалы по азимуту (например , через 10 0 ).
Видеосигналы с выхода приемника поступают на устройство первичной обработки информации (УПОИ), выделяющее сигналы цепей из помех. Первичная обработка может быть осуществлена непосредственно в аналоговом виде или после преобразования сигнала в цифровую форму. При необходимости построения траекторий движения целей осуществляется вторичная обработка сигналов информации вычислительным устройством после преобразования сигнала в цифровую форму кодирующим устройством (КУ). Траектория может наблюдаться и непосредственно на экране ИКО, благодаря большому времени послесвечения фосфоресцирующего слоя экрана ЭЛТ, возбуждаемого вспышками флуоресцирующего слоя при воздействии электронного луча. Время послесвечения существенно превышает время однократного обзора Т0 и остаточные метки сохраняются на два-три оборота антенны РЛС, что и позволяет судить о перемещении отметки на экране ИКО.
На примере РЛС кругового обзора легко проследить взаимосвязь ее основных тактических и технических характеристик. Максимальная дальность действия Dmax связана с энергией зондирующего импульса Eзи ,а также мощностью порогового сигнала Pcmin (чувствительность приемника РЛС) и коэффициентом различимости ИКО. Максимальная дальность зависит также от параметров антенны, отражающих свойств цели и условий распространения радиоволн.
Разрешающая способность по дальности ограничена шириной спектра зондирующего сигнала и полосой пропускания приемника, а также длительностью развертки (шкалой дальности) ИКО и разрешающей способностью используемой в нем ЭЛТ. Эти параметры влияют на точность измерения дальности. Точность и разрешающая способность при изменении азимута РЛС кругового обзора связаны с шириной ДНА, определяемой величиной относительно апертуры антенной системы, т.е. отношением ее размера к длине волны излучаемых колебаний.
1.2 Основные тактические параметры РЛС
Тактическими параметрами называются характеристики РЛС, определяющие ее функциональные возможности.
К основным тактическим характеристикам РЛС относятся :
1. Зона действия системы, заданная сектором обзора – область пространства, в которой система надежно выполняет функции;
2. Время обзора заданного сектора- время, необходимое для однократного обзора заданной зоны действия системы при заданном качестве;
3. Определяемые параметры, их число и точность;
4. Разрешающая способность по соответствующим координатам – способность раздельного обнаружения, измерения параметров двух или более близко расположенных целей;
5. Пропускная способность – характеризуется числом объектов, обслуживаемых системой одновременно или в единицу времени;
6. Помехозащищенность – способность РЛС выполнять свои функции при воздействии непреднамеренных и сильно организованных помех;
7. Надёжность функционирования – свойство системы сохранять свои тактические параметры в заданных пределах и условиях эксплуатации в течении требуемого интервала времени.
Достоинства данной схемы: простота построения, низкая стоимость.
Недостатки: меньшие помехозащищенность и дальность действия, по сравнению с РЛС построенными по когерентной схеме.
Область применения : РЛС обнаружения и сопровождения целей, противовоздушная и противоракетная оборона, радиоразведка и получение метеорологической информации.
В данном курсовом проекте была рассмотрена РЛС кругового обзора, построена по некогерентной схеме. Достоинством таких РЛС является относительная простота их построения и малая стоимость. Недостатком является меньшая дальность действия (чем РЛС построенные по когерентной схеме) и помехозащищенность. Для устранения этих недостатков в последние годы в некогерентных РЛС применяется принцип искусственной когерентности – суть которого заключается в запоминании частоты и начальной фазы зондирующего импульса, при последующей обработке отраженных импульсов в цифровом сигнальном процессоре, в результате чего импульсы становятся когерентными.
Область применения РЛС кругового обзора очень обширна. Обзорные РЛС применяют для обнаружения и измерения координат всех целей в данной области пространства или земной поверхности, а также для управления воздушным движением (УВД), противовоздушной и противоракетной обороны (ПВО и ПРО), разведки и получения метеорологической информации.
В результате расчета были получены следующие данные :
Максимальная дальность действия РЛС составляет D max осл = 353.43 км, причем максимально возможное отличие реальной действительности от расчетной не более σ (D) = 1,5 км , отклонение от азимутального угла не превышает σ (ϕ аз) =0,47 град. Разрешающая способность РЛС составляет δ (D) = 4 км, а по дальности и δ (ϕ аз ) =10.57 град по углу азимута.
1. Радиотехнические системы : учебник для студентов высших учебных заведений под ред. Ю.М. Казарикова. М. : Академия, 2008. 592с.
2. Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова . М.: Советское радио, 1970. 680с.
3. Радиолокационные системы. Учебник для вузов. Бакулев П.А. М.: Радиотехника, 2004. 320с.
Формулы для расчета максимальной дальности действия РЛС с учётом поглощений
Максимальная дальность действия РЛС рассчитывается по формуле:
 [км],где (1.1)
[км],где (1.1)
 =
=  –энергия, излучаемая в одном импульсе [Дж]; (1.2)
–энергия, излучаемая в одном импульсе [Дж]; (1.2)
 — импульсная мощность [кВт];
— импульсная мощность [кВт];
 — длительность импульсов [мкс];
— длительность импульсов [мкс];
 — эффективная площадь антенны [
— эффективная площадь антенны [  ]; (1.3)
]; (1.3)
 — — соответственно горизонтальный к вертикальный размеры антенны[м];
— — соответственно горизонтальный к вертикальный размеры антенны[м];
 — эффективная отражающая площадь цели [
— эффективная отражающая площадь цели [  ];
];
λ-длина волны, излучаемая антенной РЛС [см];
 — коэффициент различимости; (1.4)
— коэффициент различимости; (1.4)
Коэффициент различимости показывает отношение энергий сигнал/шум на выходе приёмника, при котором обеспечивается приём сигналов с заданными вероятностями правильного обнаружения и ложной тревоги, где
 -теоретический коэффициент различимости; (1.5)
-теоретический коэффициент различимости; (1.5)
Произведение  полагаем равным 10;
полагаем равным 10;
 –параметр обнаружения; (1.6)
–параметр обнаружения; (1.6)
 -вероятности ложной тревоги и правильного обнаружения;
-вероятности ложной тревоги и правильного обнаружения;
 -колличество импульсов, принимаемых от цели; (1.7)
-колличество импульсов, принимаемых от цели; (1.7)
 — частота посылок импульсов [Гц];
— частота посылок импульсов [Гц];
 — время облучения [с]; (1.8)
— время облучения [с]; (1.8)
 -ширина диаграммы направленности антенны на уровне 0,5 по мощности (град) (1. 9)
-ширина диаграммы направленности антенны на уровне 0,5 по мощности (град) (1. 9)
 — угловая скорость вращения антенны [град/с]; (1.10)
— угловая скорость вращения антенны [град/с]; (1.10)
 -период обзора [с];
-период обзора [с];
 -энергия шума при приеме, где (1.11)
-энергия шума при приеме, где (1.11)
k= 1.38*  -постоянная Больцмана [ Дж/град];
-постоянная Больцмана [ Дж/град];
 — коэффициент шума приёмника;
— коэффициент шума приёмника;
Т — температура окружающей среды [К].
Максимальная дальность действия РЛС с учетом поглощения энергии радиоволн;
 D) , где (1.12)
D) , где (1.12)
 D — ширина осла6яющего слоя [км];
D — ширина осла6яющего слоя [км];
 — коэффициент ослабления [дБ/км].
— коэффициент ослабления [дБ/км].
Коэффициент ослабления определяется по графику [2, стр.159] при
http://www.translatorscafe.com/unit-converter/ru-RU/calculator/radar-max-range/
http://poisk-ru.ru/s2143t4.html