Относительное движение материальной точки в теоретической механике
Содержание:
Относительное движение материальной точки:
Во многих задачах динамики рассматривается движение материальной точки относительно системы отсчета, движущейся относительно инерциальной системы. Дифференциальные уравнения движения материальной точки относительно таких подвижных, в общем случае неинерциальных, систем отсчета получают из уравнений движения точки относительно инерциальной системы отсчета и кинематической теоремы Кориолиса о сложении ускорений.
Имеем инерциальную систему отсчета 

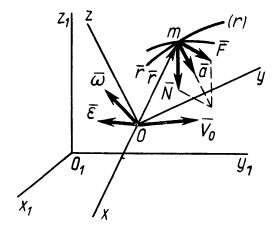
Рис. 14
Если ввести другую, неинерциальную, систему отсчета  , которая в общем случае может двигаться относительно инерциальной как свободное твердое тело, то по теореме сложения ускорений имеем
, которая в общем случае может двигаться относительно инерциальной как свободное твердое тело, то по теореме сложения ускорений имеем

где  — соответственно переносное, относительное и кориолисово ускорения.
— соответственно переносное, относительное и кориолисово ускорения.
Подставляя значение абсолютного ускорения  из (2) в (1) после переноса слагаемых, кроме
из (2) в (1) после переноса слагаемых, кроме  , из левой части в правую, получим
, из левой части в правую, получим

где  называются соответственно переносной и кориолисовой силами инерции. Получена динамическая теорема Кориолиса, или уравнение относительного движения точки в векторной форме: материальная точка движется относительно неинерциальной системы отсчета так же, как и относительно инерциальной, только к приложенным активным силам и реакциям связей следует добавить переносную и кориолисову силы инерции.
называются соответственно переносной и кориолисовой силами инерции. Получена динамическая теорема Кориолиса, или уравнение относительного движения точки в векторной форме: материальная точка движется относительно неинерциальной системы отсчета так же, как и относительно инерциальной, только к приложенным активным силам и реакциям связей следует добавить переносную и кориолисову силы инерции.
Силы инерции  и
и  являются поправками на неинерциальность системы отсчета. Для инерциальной системы отсчета они равны нулю, так как в этом случае абсолютное и относительное движения точки совпадают. Переносная и кориолисова силы инерции участвуют в создании относительного ускорения совершенно так же, как и приложенные силы со стороны материальных тел. Но эти силы инерции, по определению приложенных сил классической механики, не приложены к материальной точке, так как не участвуют в создании ее ускорения относительно инерциальной системы отсчета.
являются поправками на неинерциальность системы отсчета. Для инерциальной системы отсчета они равны нулю, так как в этом случае абсолютное и относительное движения точки совпадают. Переносная и кориолисова силы инерции участвуют в создании относительного ускорения совершенно так же, как и приложенные силы со стороны материальных тел. Но эти силы инерции, по определению приложенных сил классической механики, не приложены к материальной точке, так как не участвуют в создании ее ускорения относительно инерциальной системы отсчета.
Если координаты движущейся точки относительно подвижной системы координат в момент времени  есть
есть  то в проекциях на подвижные оси координат (3) примет форму
то в проекциях на подвижные оси координат (3) примет форму
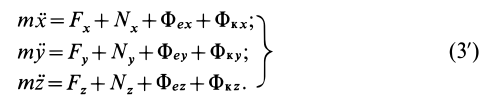
Это дифференциальные уравнения движения точки относительно подвижной системы координат в проекциях на декартовы подвижные оси координат. Они отличаются от дифференциальных уравнений абсолютного движения относительно инерциальной системы отсчета только наличием поправок на неинерциальность системы отсчета.
Относительное движение по инерции
Если материальная точка движется относительно подвижной системы отсчета прямолинейно и равномерно, то такое движение называют относительным движением по инерции. В этом случае относительная скорость  постоянна по модулю и направлению, а потому относительное ускорение
постоянна по модулю и направлению, а потому относительное ускорение  . Из (3) следует в этом случае
. Из (3) следует в этом случае

Это условие для сил при относительном движении точки по инерции.
Относительное равновесие
При покое материальной точки относительно подвижной системы отсчета ее относительные скорость и ускорение равны нулю, т. е.  и
и  . Ускорение Кориолиса тоже равно нулю, так как
. Ускорение Кориолиса тоже равно нулю, так как
Из (3) получаем условие относительного равновесия для сил:

При абсолютном движении по инерции или абсолютном равновесии относительно инерциальной системы отсчета имеем для сил одно и то же условие  . Условие относительного равновесия для сил отличается от условия относительного движения по инерции.
. Условие относительного равновесия для сил отличается от условия относительного движения по инерции.
Инерциальные системы отсчета
Переносное ускорение в общем случае вычисляется по формуле

где  — ускорение точки, принятой за полюс, например начало координат подвижной системы координат;
— ускорение точки, принятой за полюс, например начало координат подвижной системы координат;  — угловая скорость вращения подвижной системы координат вокруг выбранного полюса;
— угловая скорость вращения подвижной системы координат вокруг выбранного полюса;  — угловое ускорение этого вращения;
— угловое ускорение этого вращения;  — радиус-вектор движущейся точки относительно выбранного полюса.
— радиус-вектор движущейся точки относительно выбранного полюса.
Пусть подвижная система отсчета все время движется относительно основной инерциальной системы поступательно, равномерно и прямолинейно. В этом случае переносная и кориолисова силы инерции равны нулю, т. е.

так как при поступательном движении  и
и  . При равномерном и прямолинейном движении
. При равномерном и прямолинейном движении  . Таким образом, в этом случае из (3) получаем уравнение относительного движения
. Таким образом, в этом случае из (3) получаем уравнение относительного движения

которое совпадает с уравнением движения относительно инерциальной системы отсчета (1).
Все подвижные системы отсчета, которые движутся поступательно, равномерно и прямолинейно относительно основной инерциальной системы отсчета, называются тоже инерциальными. Относительно всех инерциальных систем отсчета получаются одинаковые уравнения движения материальной точки. Ускорения материальной точки относительно всех инерциальных систем отсчета одинаковы.
Отсутствие принципиальной возможности каким-либо механическим опытом, основанным на наблюдении за движением материальных тел, отличить одну инерциальную систему отсчета от другой находится в основе принципа относительности классической механики — принципа Галилея — Ньютона, который утверждает: все механические явления в различных инерциальных системах отсчета протекают одинаково, или никаким механическим опытом нельзя обнаружить инерциальное движение системы отсчета, участвуя вместе с ней в этом движении. Наоборот, неинерциальную систему отсчета можно обнаружить и отличить одну от другой по поправкам на неинерциальность.
Скорости материальной точки относительно различных инерциальных систем отсчета разные, но нет возможности из наблюдений за движением материальной точки в различных системах отсчета сделать утверждение, какая из инерциальных систем отсчета является основной, неподвижной, а какая — подвижной.
В специальной теории относительности имеет место принцип относительности Эйнштейна, который утверждает: все физические явления во всех инерциальных системах отсчета протекают одинаково. Физические явления кроме механических включают также электромагнитные процессы.
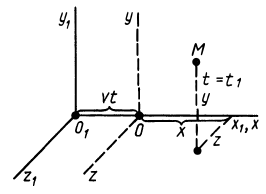
Рис. 15
Возьмем две инерциальные системы отсчета:  и
и  (рис. 15). Примем, что система отсчета
(рис. 15). Примем, что система отсчета  движется относительно
движется относительно  с постоянной по модулю и направлению скоростью
с постоянной по модулю и направлению скоростью  параллельно оси
параллельно оси  , причем в начальный момент времени при
, причем в начальный момент времени при  начала координат и соответствующие оси координат совпадают. В соответствии с концепцией классической механики время для обеих систем координат одно и то же. Нетрудно видеть, что координаты какой-либо точки
начала координат и соответствующие оси координат совпадают. В соответствии с концепцией классической механики время для обеих систем координат одно и то же. Нетрудно видеть, что координаты какой-либо точки  в двух инерциальных системах отсчета связаны соотношениями параллельного переноса. Имеем:
в двух инерциальных системах отсчета связаны соотношениями параллельного переноса. Имеем:

Эти соотношения называются преобразованиями Галилея в частном случае движения двух инерциальных систем отсчета друг относительно друга.
Преобразования Галилея не изменяют формы уравнения движения точки (1), т. е. оно инвариантно по отношению к преобразованиям Галилея.
Движение точки относительно земли
Для неинерциальной системы отсчета уравнение движения материальной точки под действием силы отличается от уравнения движения относительно инерциальных систем отсчета. Согласно (3), оно имеет форму

Наличие поправок на неинерциальность систем отсчета в виде сил инерции и позволяет установить неинерциальность системы отсчета и отличить эти системы отсчета одну от другой.
Система отсчета, скрепленная с земным шаром, не является инерциальной. Земной шар движется относительно гелиоцентрической инерциальной системы отсчета. При рассмотрении движения материальных тел относительно Земли должны проявлять себя эффекты, связанные с неинерциальностью системы отсчета. Земной шар движется относительно гелиоцентрической системы отсчета как свободное твердое тело. Его центр перемещается по эллиптической орбите, близкой к окружности. Кроме того, он вращается вокруг оси, проходящей через его центр, с почти постоянной по модулю и направлению угловой скоростью, совершая один оборот за сутки. Угловая скорость вращения Земли

т. е. величина малая по сравнению с единицей.
В общем случае переносная сила инерции

где  — ускорение центра земного шара относительно гелиоцентрической системы отсчета;
— ускорение центра земного шара относительно гелиоцентрической системы отсчета;  — радиус-вектор движущейся точки, проведенный из центра Земли. Ускорение
— радиус-вектор движущейся точки, проведенный из центра Земли. Ускорение  с очень большой степенью точности можно считать равным нулю, так как центр Земли движется по эллиптической орбите очень больших размеров. Угловое ускорение
с очень большой степенью точности можно считать равным нулю, так как центр Земли движется по эллиптической орбите очень больших размеров. Угловое ускорение  можно тоже считать равным нулю, так как
можно тоже считать равным нулю, так как  считаем постоянным вектором. Оставшаяся часть переносного ускорения
считаем постоянным вектором. Оставшаяся часть переносного ускорения  пропорциональна
пропорциональна  , т. е. величина малая по сравнению с величинами порядка
, т. е. величина малая по сравнению с величинами порядка  для не очень больших расстояний
для не очень больших расстояний  . Величиной порядка
. Величиной порядка  является сила инерции Кориолиса
является сила инерции Кориолиса

где  — скорость материальной точки относительно Земли. Таким образом, неинерциальность системы отсчета, скрепленной с Землей, проявляется главным образом через влияние силы инерции Кориолиса, если рассматривается движение материальной точки вблизи Земли, при котором
— скорость материальной точки относительно Земли. Таким образом, неинерциальность системы отсчета, скрепленной с Землей, проявляется главным образом через влияние силы инерции Кориолиса, если рассматривается движение материальной точки вблизи Земли, при котором  не очень велико. Рассмотрим несколько примеров этого влияния кориолисовой силы инерции.
не очень велико. Рассмотрим несколько примеров этого влияния кориолисовой силы инерции.
Маятник Фуко
Если подвесить на длинной нити груз достаточно малых размеров, то действующая на него сила  будет состоять из силы притяжения
будет состоять из силы притяжения  к Земле, направленной к центру Земли, и силы натяжения нити
к Земле, направленной к центру Земли, и силы натяжения нити  (рис. 16, а). Эти силы расположены в одной вертикальной плоскости
(рис. 16, а). Эти силы расположены в одной вертикальной плоскости  (рис. 16,6). Если начальные отклонения и скорость груза тоже находятся в плоскости
(рис. 16,6). Если начальные отклонения и скорость груза тоже находятся в плоскости  , то маятник при колебаниях должен все время находиться в плоскости
, то маятник при колебаниях должен все время находиться в плоскости  , неподвижной относительно гелиоцентрической системы отсчета. Земной шар поворачивается относительно этой системы отсчета с угловой скоростью
, неподвижной относительно гелиоцентрической системы отсчета. Земной шар поворачивается относительно этой системы отсчета с угловой скоростью  . Следовательно, плоскость
. Следовательно, плоскость  по отношению к Земле должна поворачиваться в сторону, противоположную Земле, с угловой скоростью
по отношению к Земле должна поворачиваться в сторону, противоположную Земле, с угловой скоростью  , если маятник подвесить на северном полюсе. Для маятника на широте
, если маятник подвесить на северном полюсе. Для маятника на широте  угловая скорость вращения плоскости колебаний маятника равна
угловая скорость вращения плоскости колебаний маятника равна  . На экваторе эта скорость равна нулю.
. На экваторе эта скорость равна нулю.
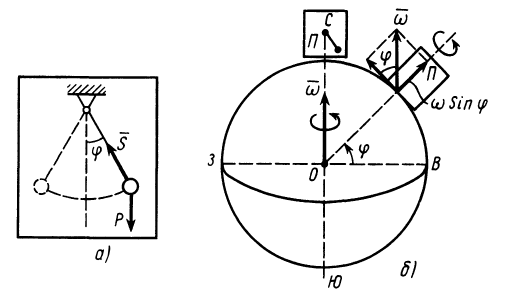
Рис. 16
Рис. 17
Если тело маятника имеет выступ, который при колебаниях может оставлять след, например на песке, то этот след при движении маятника в одну сторону будет отличаться от следа при движении в противоположную сторону из-за вращения Земли. Это отличие тем больше, чем длиннее нить маятника. Фуко в 1857 г. использовал маятник длиной  . В СССР маятник Фуко имеется в Исаакиевском соборе в Ленинграде. Маятник Фуко наглядно демонстрирует вращение Земли относительно инерциальной системы отсчета.
. В СССР маятник Фуко имеется в Исаакиевском соборе в Ленинграде. Маятник Фуко наглядно демонстрирует вращение Земли относительно инерциальной системы отсчета.
Отклонение движущихся тел вправо в Северном полушарии
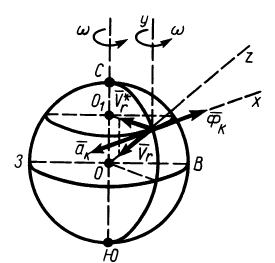
В Северном полушарии из-за дополнительного действия силы инерции Кориолиса, вызванной вращением Земли, все движущиеся тела должны смещаться в правую сторону, если смотреть в направлении движения. Пусть материальная точка движется со скоростью  относительно Земли по касательной к меридиану с севера на юг (рис. 17). Определим проекцию
относительно Земли по касательной к меридиану с севера на юг (рис. 17). Определим проекцию  этой скорости на плоскость, перпендикулярную оси вращения Земли. Повернув вектор
этой скорости на плоскость, перпендикулярную оси вращения Земли. Повернув вектор  вокруг оси, параллельной оси вращения земного шара, на
вокруг оси, параллельной оси вращения земного шара, на  в направлении его вращения, получим, согласно правилу Жуковского, направление ускорения Кориолиса
в направлении его вращения, получим, согласно правилу Жуковского, направление ускорения Кориолиса  по касательной к параллели с запада на восток. Сила инерции Кориолиса
по касательной к параллели с запада на восток. Сила инерции Кориолиса  соответственно направлена с востока на запад, т. е. вправо от направления движения. Действие такой силы вызовет у движущейся точки дополнительное ускорение относительно Земли в направлении этой силы, а следовательно, и ее перемещение, если точка движется в течение некоторого времени. Движение точки может иметь направление, отличное от касательной к меридиану. Важно, чтобы оно имело отличную от нуля проекцию скорости на плоскость, перпендикулярную оси вращения земного шара.
соответственно направлена с востока на запад, т. е. вправо от направления движения. Действие такой силы вызовет у движущейся точки дополнительное ускорение относительно Земли в направлении этой силы, а следовательно, и ее перемещение, если точка движется в течение некоторого времени. Движение точки может иметь направление, отличное от касательной к меридиану. Важно, чтобы оно имело отличную от нуля проекцию скорости на плоскость, перпендикулярную оси вращения земного шара.
Если рассмотреть поступательное движение железнодорожного вагона, то для него сила инерции Кориолиса пройдет через центр его тяжести слева направо, если смотреть по движению вагона. Это приведет к увеличению давления на правый рельс и к его уменьшению на левый. На двухколейных железных дорогах правый рельс изнашивается быстрее левого.
Для частички воды в реке действие силы Кориолиса слева направо, если смотреть по течению реки, приведет к прижиманию этой частички к правому берегу, способствуя большему его подмыванию. Правый берег рек в Северном полушарии более подмыт, чем левый на прямолинейных участках реки. Этот эффект известен в географии как закон Бэра. На закруглениях реки вследствие центробежных сил инерции может оказаться подмытым и левый берег.
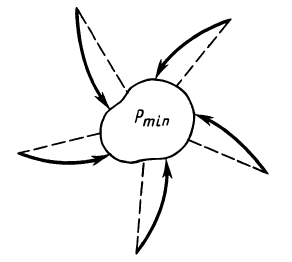
Действие силы инерции Кориолиса на летящие самолеты, ракеты, снаряды, движущийся воздух, морские течения приводит к их отклонению в правую сторону в Северном полушарии. В Южном полушарии отклонение будет в левую сторону. Сила инерции Кориолиса способствует образованию циклонов, антициклонов, вихрей, смерчей и т. д. Если в каком-то месте образовалось пониженное давление, например вследствие местного нагревания воздуха, то к этому месту начнет двигаться воздух из мест с повышенным давлением. Сила инерции Кориолиса отклонит движущиеся частички воздуха вправо, создав местный вихрь (рис. 18), а для больших масс воздуха— циклон. Аналогично, в местах с повышенным давлением образуются антициклоны.
Отклонение падающих тел к востоку
Рассмотрим в Северном полушарии тело, падающее вертикально вниз под действием силы тяжести без начальной скорости. Действие силы инерции Кориолиса в этом случае в первом приближении сведется к отклонению падающего тела к востоку. Действительно, если скорость тела  направлена по вертикали к центру Земли, то ее проекция на плоскость параллельного круга направлена к центру этого круга (рис. 19). Ускорение Кориолиса
направлена по вертикали к центру Земли, то ее проекция на плоскость параллельного круга направлена к центру этого круга (рис. 19). Ускорение Кориолиса  соответственно направлено по касательной к параллели на запад, а сила инерции Кориолиса
соответственно направлено по касательной к параллели на запад, а сила инерции Кориолиса  — по касательной к параллели на восток. Она вызовет отклонение падающего тела к востоку. Как показывают расчеты, это отклонение при падении с высоты 160 м составляет приблизительно 2,8 см при
— по касательной к параллели на восток. Она вызовет отклонение падающего тела к востоку. Как показывают расчеты, это отклонение при падении с высоты 160 м составляет приблизительно 2,8 см при  , что хорошо согласуется с результатами опытов.
, что хорошо согласуется с результатами опытов.
Пример:
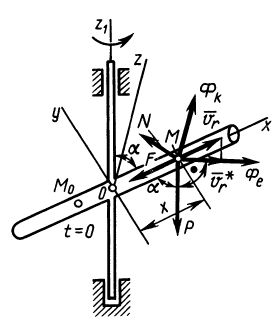
Внутри трубки, имеющей гладкую поверхность, находится шарик массой  (рис. 20). Шарик притягивается к неподвижной точке
(рис. 20). Шарик притягивается к неподвижной точке  трубки силой, пропорциональной расстоянию шарика до этой точки. Коэффициент пропорциональности
трубки силой, пропорциональной расстоянию шарика до этой точки. Коэффициент пропорциональности  . Трубка наклонена к вертикальной оси
. Трубка наклонена к вертикальной оси  на угол
на угол  и вращается вокруг этой оси с постоянной угловой скоростью
и вращается вокруг этой оси с постоянной угловой скоростью  . В начальный момент шарик находился в точке
. В начальный момент шарик находился в точке  на расстоянии
на расстоянии  и имел скорость относительно трубки
и имел скорость относительно трубки  .
.
Определить закон движения шарика по трубке, принимая его за точку; силу давления шарика на стенку трубки и силу притяжения в момент времени  .
.
Решение:
Выберем систему подвижных осей координат  , вращающихся вместе с трубкой. Ось
, вращающихся вместе с трубкой. Ось  направим по трубке.
направим по трубке.
Векторное уравнение движения шарика относительно подвижной системы координат имеет вид

В проекциях на подвижные оси координат
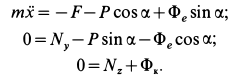
Здесь  — сила тяжести шарика;
— сила тяжести шарика;  — сила_реакции трубки;
— сила_реакции трубки;  —сила притяжения;
—сила притяжения;  —переносная сила инерции и сила инерции Кориолиса. Так как
—переносная сила инерции и сила инерции Кориолиса. Так как  , то
, то  . Ось
. Ось  направлена параллельно силе
направлена параллельно силе  , а ось
, а ось  вместе с другими осями образует правую систему осей координат. В рассматриваемом случае
вместе с другими осями образует правую систему осей координат. В рассматриваемом случае
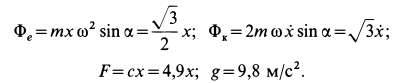
Подставляя эти значения сначала в общем виде в уравнения движения, после простых преобразований получаем:

После подстановки числовых значений величин имеем

Дифференциальное уравнение является линейным неоднородным; следовательно, его решение
где  —общее решение однородного уравнения;
—общее решение однородного уравнения;  — частное решение неоднородного уравнения, правая часть которого постоянна. В качестве частного решения можно взять постоянную
— частное решение неоднородного уравнения, правая часть которого постоянна. В качестве частного решения можно взять постоянную  . При подстановке значения в дифференциальное уравнение убеждаемся, что оно обращает уравнение в тождество, т. е. является его частным решением.
. При подстановке значения в дифференциальное уравнение убеждаемся, что оно обращает уравнение в тождество, т. е. является его частным решением.
Общее решение однородного уравнения является решением однородного уравнения
Его характеристическое уравнение

Корни характеристического уравнения  чисто мнимые. Следовательно, решение однородного уравнения, зависящее от двух постоянных интегрирования
чисто мнимые. Следовательно, решение однородного уравнения, зависящее от двух постоянных интегрирования  и
и  , можно выразить в форме
, можно выразить в форме


Начальные условия задачи

Подставляя их в выражения для  и
и  , получаем следующие уравнения для определения постоянных интегрирования:
, получаем следующие уравнения для определения постоянных интегрирования:

Их решения  .
.
Уравнения движения шарика с учетом значений постоянных принимает вид

В момент времени 

Подставляя эти значения и в выражения для  и
и  , имеем
, имеем

Давление шарика  на трубку равно по величине силе реакции трубки на шарик. Поэтому
на трубку равно по величине силе реакции трубки на шарик. Поэтому

Сила притяжения  при
при 

Невесомость
Динамическая теорема Кориолиса позволяет рассмотреть состояние невесомости, которое, в частности, возникает при движении космических кораблей как искусственных спутников Земли. При рассмотрении невесомости материальной точки целесообразно ее представлять как твердое тело, имеющее поверхность, которой оно может соприкасаться с другими телами. Будем предполагать, что скорости и ускорения всех точек тела одинаковы, а реакции соприкасающихся тел приводятся к равнодействующей.
Под невесомостью такой материальной точки понимают отсутствие давления этой точки на каждое из тел, с которым она может соприкасаться. В частности, невесомая материальная точка не давит на площадку весов (не имеет веса), находящихся в покое по отношению к той системе отсчета, относительно которой покоится материальная точка.
Систему отсчета, относительно которой материальная точка находится в покое и, следовательно, имеет относительно нее скорость и ускорение, равные нулю, назовем собственной системой отсчета материальной точки. Все величины относительно этой системы отсчета условимся обозначать специальным индексом  . Тогда имеем
. Тогда имеем  и т. д. Естественно, что
и т. д. Естественно, что  и
и  равны нулю.
равны нулю.
Невесомая материальная точка (тело), прикрепленная на пружине к любому телу, покоящемуся относительно ее собственной системы отсчета, не деформирует эту пружину. Учитывая, что давление точки на какое-либо тело по модулю совпадает с силой реакции тела на эту точку, невесомость наблюдается при равенстве нулю силы реакции от любого тела, соприкасающегося с рассматриваемой невесомой материальной точкой.
Если в общем случае рассматривать невесомость материального тела, а не точки, то реакции окружающих его тел сведутся к распределенным силам по поверхности его соприкосновения с этими телами. Сила реакции, отнесенная к единице площади поверхности соприкосновения (напряжение силы реакции), должна при невесомости тела быть равна нулю в каждой точке его поверхности. Это является условием невесомости для любого тела, не обязательно твердого.
Для абсолютно твердого тела при его невесомости вместо равенства нулю напряжения поверхностной силы в каждой точке его поверхности соприкосновения достаточно равенства нулю главного вектора и главного момента этих сил относительно любого центра приведения.
Ограничимся рассмотрением невесомости материальной точки, т. е. абсолютно твердого тела, для которого все поверхностные силы приводятся только к одной равнодействующей силе — реакции тел, соприкасающихся с ним. Невесомость материальной точки не связана с системой отсчета или с наблюдателем, находящимся в той или иной системе отсчета. Но для выявления сил, действие которых испытывает материальная точка, выберем ее собственную систему отсчета, по отношению к которой ее относительные скорость и ускорение равны нулю, т. е.  и
и  . В этом случае сила инерции Кориолиса тоже равна нулю и для сил выполняется условие относительного равновесия
. В этом случае сила инерции Кориолиса тоже равна нулю и для сил выполняется условие относительного равновесия
где  —равнодействующая активных или заданных сил от тел, не соприкасающихся с точкой;
—равнодействующая активных или заданных сил от тел, не соприкасающихся с точкой;  —равнодействующая реакция от всех соприкасающихся в точкой тел;
—равнодействующая реакция от всех соприкасающихся в точкой тел;  — переносная сила инерции в собственной системе отсчета рассматриваемой точки.
— переносная сила инерции в собственной системе отсчета рассматриваемой точки.
Из условия относительного равновесия сил имеем

Согласно определению невесомости,  и, следовательно,
и, следовательно, .
.
Таким образом, условие невесомости через силы можно выразить как  или как
или как  , т. е. для невесомости материальной точки необходимо и достаточно, чтобы равнодействующая активных сил от материальных объектов, не соприкасающихся с точкой, вместе с переносной силой инерции в собственной системе отсчета рассматриваемой точки образовывала равновесную систему сил.
, т. е. для невесомости материальной точки необходимо и достаточно, чтобы равнодействующая активных сил от материальных объектов, не соприкасающихся с точкой, вместе с переносной силой инерции в собственной системе отсчета рассматриваемой точки образовывала равновесную систему сил.
Согласно теореме о сложении ускорений, абсолютное ускорение в общем случае определяется по формуле

Если абсолютное ускорение рассматривать относительно инерциальной системы отсчета, а в качестве подвижной системы отсчета выбрать собственную систему отсчета, то 
 и, следовательно,
и, следовательно,  . Сила инерции в инерциальной системе отсчета
. Сила инерции в инерциальной системе отсчета  , таким образом, совпадает с переносной силой инерции в собственной системе отсчета
, таким образом, совпадает с переносной силой инерции в собственной системе отсчета  . Учитывая, что
. Учитывая, что  условие невесомости можно выразить как
условие невесомости можно выразить как  , т. е. как уравновешивание силой инерции в инерциальной системе отсчета равнодействующей сил от действия тел, не соприкасающихся с невесомой материальной точкой.
, т. е. как уравновешивание силой инерции в инерциальной системе отсчета равнодействующей сил от действия тел, не соприкасающихся с невесомой материальной точкой.
Проверим выполнение условия невесомости для материальной точки, находящейся в космическом корабле, который движется поступательно относительно Земли в качестве ее искусственного спутника за пределами атмосферы. За инерциальную систему отсчета можно принять систему отсчета, скрепленную с Землей.
Пусть материальная точка неподвижна относительно космического корабля. Тогда собственной системой отсчета будет система отсчета, скрепленная с кораблем. Силой от действия тел, не соприкасающихся с точкой, является сила тяготения Земли  , где
, где  — масса точки, a
— масса точки, a  — ее ускорение, создаваемое силой тяготения. Сила инерции точки в ее движении относительно Земли
— ее ускорение, создаваемое силой тяготения. Сила инерции точки в ее движении относительно Земли  совпадает с переносной силой инерции
совпадает с переносной силой инерции  , где
, где  — переносное ускорение точки от поступательного движения вместе с собственной системой отсчета, скрепленной с космическим кораблем.
— переносное ускорение точки от поступательного движения вместе с собственной системой отсчета, скрепленной с космическим кораблем.
Если корабль не испытывает действия других сил, кроме силы тяготения Земли, то его ускорение от этого тяготения тоже равно  , так как ускорения от силы тяготения не зависят от масс тел, а зависят только от расстояния этих тел до центра Земли. Таким образом,
, так как ускорения от силы тяготения не зависят от масс тел, а зависят только от расстояния этих тел до центра Земли. Таким образом,  и, следовательно, условие невесомости точки
и, следовательно, условие невесомости точки  выполняется. Материальная точка будет находиться в невесомости и, следовательно, не должна оказывать давления на любое тело, движущееся вместе с космическим кораблем.
выполняется. Материальная точка будет находиться в невесомости и, следовательно, не должна оказывать давления на любое тело, движущееся вместе с космическим кораблем.
В космическом корабле, который кроме поступательного движения имеет также и вращение, каждая из материальных частиц корабля не находится в состоянии невесомости, хотя весь корабль как целое находится в состоянии невесомости. Для него главный вектор и главный момент поверхностных сил равны нулю, так как нет тел, с которыми корабль соприкасается своей поверхностью.
Материальная точка внутри кабины корабля находится в состоянии невесомости, пока она не соприкасается со стенками корабля и с другими телами, скрепленными с кораблем.
Кажется, что для невесомости тела необходима невесомость каждой его точки. Это приводит к требованию отсутствия взаимных давлений между точками тела или к отсутствию внутренних напряжений в теле. Но такие напряжения всегда имеются при невесомости вследствие естественной связи точек тела друг с другом, на которую можно влиять, например, термообработкой, изменением температуры и т. д. При невесомости тела как целого не обязательно отсутствие даже дополнительных напряжений, создаваемых движением тела. Достаточно равенства нулю напряжений в точках поверхности тела, создаваемых другими, соприкасающимися телами (связями), а для абсолютно твердого тела — равенства нулю главного вектора и главного момента поверхностных сил.
В невесомости находятся земной шар и другие планеты Солнечной системы, их спутники, если пренебречь действием на них метеоритов, космического излучения и т. д.
В состоянии невесомости находилось бы свободно падающее тело вблизи Земли, если бы не было действия воздуха. Невесомость можно создать искусственно вблизи Земли в герметизированной кабине летательного аппарата, заставив его с помощью двигателей совершать поступательное движение с ускорением  , равным ускорению от силы притяжения Земли.
, равным ускорению от силы притяжения Земли.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Геометрия масс
- Свойства внутренних сил системы
- Дифференциальное уравнение движения системы
- Теоремы об изменении количества движения и о движении центра масс
- Две основные задачи динамики точки
- Прямолинейное движение точки
- Криволинейное движение материальной точки
- Движение несвободной материальной точки
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
iSopromat.ru

Составление систем дифференциальных уравнений относительного движения точки массой m под действием сил.
Уравнение второго основного закона динамики для абсолютного движения точки массой m имеет вид

где a – абсолютное ускорение точки;
Fi – силы, действующие на точку, включая реакции связей.
Абсолютное ускорение точки в сложном движении определяется как геометрическая сумма трех ускорений: переносного aпер , относительного aотн и кориолисова aкор, т.е.

Подставляя это выражение в (7.1), получим


Введем в рассмотрение два вектора

и назовем их переносной и кориолисовой силами инерции.
Подставим эти векторы в уравнение (7.2):

Уравнение (7.3) представляет собой основное уравнение динамики относительного движения материальной точки.
В случае равномерного и поступательного переносного движения Фпер= 0, Фкор= 0 и уравнение (7.3) ничем не отличается от уравнения (7.1). Во всех инерциальных системах отсчета уравнение движения точки записывается одинаково. В этом заключается принцип относительности классической механики.
Проецируя уравнение (7.3) на оси подвижной декартовой системы координат, получим дифференциальные уравнения относительного движения точки
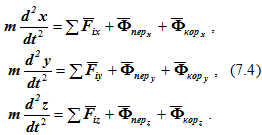
Дифференциальные уравнения относительного движения отличаются от дифференциальных уравнений абсолютного движения наличием в правой части уравнений проекций на соответствующие оси переносной и кориолисовой сил инерции.
Рассмотрим частные случаи относительного движения материальной точки:
- если подвижная система отсчета движется поступательно, то Фкор= 0, так как ωпер= 0, и уравнение относительного движения примет вид
Уравнение (7.6) представляет собой уравнение относительного покоя точки.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Динамика материальной точки. Все законы и теоремы
Законы динамики
Первый закон Ньютона (закон инерции Галилея)
Существуют такие системы отсчета, относительно которых любая материальная точка, не взаимодействующая с другими телами и точками, движется прямолинейно и равномерно. В частности, если точка покоилось в определенный момент времени, то она будет покоиться и в последующие моменты.
Не во всех системах отсчета выполняется закон инерции. Например, если мы выберем систему отсчета, связанную с ускоряющейся ракетой, то относительно этой системы, не взаимодействующие материальные точки, не будут двигаться прямолинейно и равномерно.
Инерциальная система отсчета – это система отсчета, в которой справедлив закон инерции.
Движение по инерции – это движение точки, совершаемое при отсутствии действующих на нее сил.
Второй закон Ньютона (основной закон динамики)
Взаимодействие на выбранную материальную точку со стороны других тел описывается вектором, который называется силой. При этом, в инерциальных системах отсчета, действие силы приводит к ускорению точки , которое пропорционально приложенной силе, имеет одинаковое с ней направление, и обратно пропорционально массе точки:
(1) .
Если есть радиус-вектор, проведенный из начала координат к точке, то ускорение есть вторая производная радиус-вектора по времени:
.
Производную по времени, в теоретической механике, обозначают точкой над переменной, а не штрихом, как в математическом анализе.
Если на точку действует не одна, а n сил, то в правой части производится суммирование по всем силам, действующих на точку. Тогда уравнение (1) примет вид:
(2) .
Третий закон динамики (закон равенства действия и противодействия)
Если две материальные точки действуют друг на друга, то сила, с которой первая точка действует на вторую, равна по абсолютной величине и противоположна по направлению силе, с которой вторая точка действует на первую. При этом силы направлены вдоль прямой, соединяющей точки.
Закон независимости сил
Несколько одновременно действующих на материальную точку сил сообщают точке такое ускорение, какое сообщила бы ей одна сила, равная их геометрической сумме.
То есть уравнение (2) можно записать в виде:
, где .
Задачи динамики
Первая задача динамики
Зная закон движения точки, определить действующую на нее силу.
Вторая (основная) задача динамики
Зная действующие на точку силы, определить ее закон движения.
Основные виды сил
Единицей измерения силы в СИ является 1 ньютон (1 Н = кг·м/с 2 ). Это сила, которую нужно приложить к точке массой 1 кг, чтобы она получила ускорение 1 м/с 2 .
Сила тяжести.
Сила тяжести действует на любую материальную точку, находящуюся на поверхности Земли. Она пропорциональна массе точки и равна
,
где – ускорение свободного падения, направленное вниз. Его величина зависит от широты и высоты над уровнем моря. Стандартное значение, принятое при построении систем единиц, составляет м/с 2 .
Сила тяготения.
.
Здесь – массы точек, r – расстояние между ними, Н·м 2 /кг 2 – гравитационная постоянная.
Для точки массы m на поверхности Земли имеем: . Отсюда . Тогда силу тяготения Земли можно вычислять по формуле:
,
где R = 6371 км – радиус Земли; r – расстояние от точки до центра Земли.
Сила электростатического взаимодействия.
,
где – величины зарядов; r – расстояние между ними; Н·м 2 /Кл 2 – коэффициент. Одноименные заряды отталкиваются, разноименные – притягиваются.
Сила трения скольжения
возникает при скольжении одного тела по поверхности другого. Она направлена в сторону, противоположную скорости движения. Ее величина определяется по формуле:
F = fN ,
где N – сила давления, перпендикулярная поверхности, с которой скользящее тело прижимается к поверхности; f – коэффициент трения, который зависит от материалов соприкасаемых тел.
Сила упругости.
Эта сила возникает при деформации упругих тел. Это могут быть растяжения, сжатия и изгибы. Она определяется по формуле
F = cλ ,
где λ – величина деформации; c – коэффициент, который зависит от материала упругого тела. Для пружины λ – это удлинение или сжатие пружины; c – коэффициент жесткости.
Сила вязкого трения.
При движении тела в вязкой среде с небольшими скоростями, на него действует сила трения, пропорциональная скорости движения:
F = μv ,
где v – скорость тела; μ – коэффициент сопротивления.
При больших скоростях, сила трения пропорциональна квадрату скорости.
Дифференциальные уравнения движения точки
Спроектируем уравнение (2) на оси прямоугольной системы координат. Пусть радиус вектор точки имеет в этой системе компоненты (проекции) . Тогда из векторного уравнения (2) получаем систему уравнений:
.
Это есть дифференциальные уравнения движения точки в прямоугольной системе координат.
Спроектируем уравнение (2) на оси естественного трехгранника:
.
Здесь – единичный вектор, направленный по касательной к траектории; – единичный вектор, перпендикулярный и лежащий в касательной плоскости траектории; – единичный вектор, перпендикулярный и . Поскольку , то .
Вводим пройденный путь s , измеренный вдоль дуги траектории точки. Пусть ρ – радиус кривизны траектории в рассматриваемой точке. Тогда, для естественного способа задания движения точки, уравнения движения примут вид:
.
Уравнения движения в полярных координатах для плоского движения:
.
Прямолинейное движение точки
Пусть ось x направлена вдоль линии движения точки. Тогда уравнение движения имеет вид:
(3) .
Его общее решение:
,
где – произвольные постоянные. Их находят из начальных условий:
.
Если сила Fx зависит только от времени, то из уравнения (3) сначала определяют скорость vx , а затем координату x , последовательно интегрируя уравнения:
.
Если сила зависит только от координаты x , то выполняют преобразование:
;
;
.
Колебательное движение материальной точки
Свободные колебания
Рассмотрим движение груза на пружинке. Считаем, что груз является материальной точкой; массой пружины можно пренебречь; и отсутствует сила тяжести. Пусть движение происходит вдоль оси x . За начало отсчета выберем такое положение груза, при котором пружина не деформирована. Тогда на точку действует только восстанавливающая сила упругости пружины, которая определяется по закону Гука:
(К1) ,
где x – деформация пружины; c – коэффициент жесткости. Он равен силе, которая возникает при деформации, равной единице (один метр) и имеет размерность [Н/м]. Из (К1) видно, что сила является восстанавливающей, то есть направлена так, чтобы вернуть точку в начало координат к недеформированному состоянию. Сила такого вида возникает не только при деформации пружины, но и во многих других случаях при небольшом отклонении точки от равновесного положения.
Составим уравнение движения точки и выполняем преобразования:
.
Введем обозначение . В результате получаем.
(К2) .
Уравнение (К2) называется дифференциальным уравнением свободных колебаний. Его также называют дифференциальным уравнением гармонических колебаний. Оно является линейным однородным дифференциальным уравнением второго порядка.
Ищем его решение в виде . Получаем характеристическое уравнение:
.
Оно имеет два мнимых корня: . Тогда общее решение уравнения (К2) имеет вид:
,
где и – произвольные постоянные. Они определяются из начальных условий. Пусть – координата и скорость точки в начальный момент времени , тогда
;
.
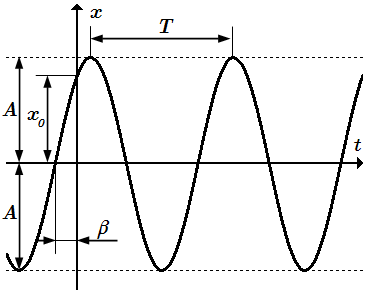
График гармонического движения точки.
Часто бывает удобно вместо постоянных интегрирования и перейти к новым постоянным A и β по формулам: . Тогда
(К3) .
Это есть уравнение гармонического колебательного движения точки. Здесь – амплитуда колебаний;
– фаза колебаний;
β – начальная фаза, ;
– циклическая частота колебаний, которую также называют угловой или собственной.
Период колебаний: .
Частота колебаний: – это число циклов колебаний, совершенных в единицу времени. Она широко применяется в технике, однако для математического описания более удобна угловая частота, которую мы будем использовать в дальнейшем и называть просто частотой.
Частота k и период T не зависят от начальных условий, а амплитуда и фаза – зависят. Кроме этого, k и T не зависят от амплитуды. Колебания, у которых частота и период не зависят от амплитуды, называют изохорными колебаниями. Если рассмотреть колебания с большой амплитудой, при которой закон Гука (К1) не выполняется, то уравнение (К2) не будет линейным и колебания не будут изохорными.
Влияние постоянной силы
Пусть теперь, наряду с восстанавливающей силой (К1), на точку действует постоянная сила P , например сила тяжести. Тогда уравнение движения примет вид:
.
Это приводит к смещению центра колебаний в сторону действия силы P на величину
δ ст = P/c .
Это смещение называют статическим отклонением. Если P – сила тяжести, то
.
Колебания при вязком трении
Пусть на точку, кроме силы упругости пружины, действует сила сопротивления среды. При малых скоростях она пропорциональна скорости точки:
. Это так называемое вязкое трение. Составим уравнение движения:
. Обозначив μ/m= 2 b , получаем:
(К4) . Составляем характеристическое уравнение:
(К5) . Оно имеет два корня:
.
Затухающие колебания
При b , корни характеристического уравнения (К5) комплексные:
. Тогда общее решение уравнения (К4) имеет вид:
,
где . Обозначим , . Тогда
(К6) .
, ;
– амплитуда (переменная величина);
b – коэффициент затухания;
– частота затухающих колебаний;
– период затухающих колебаний. Он больше периода свободных колебаний. При небольшом коэффициенте затухания (при b/k ≪ 1 ) T 1 ≈ T .
Колебания, происходящие по закону (К6) называются затухающими. График затухающих колебаний заключен между двумя кривыми x = ±Ae –bt , симметричными относительно оси t .
Затухающие колебания можно рассматривать как гармонические колебания с переменной амплитудой . Относительное изменение переменной амплитуды за период колебания называется декрементом колебаний. Он равен
. Модуль логарифма декремента называется логарифмическим декрементом. Он равен .
Апериодическое движение точки
При (или ) корни характеристического уравнения (К5) действительные. Поэтому движение точки является апериодическим.
При (или ) характеристическое уравнение (К5) имеет два различных действительных корня:
. Тогда общее решение уравнения (К4) имеет вид:
(К7) .
Сюда не входят тригонометрические функции. Поэтому это апериодическое движение. Точка может пройти через положение равновесия x = 0 не более одного раза.
Закон движения (К7) можно выразить через гиперболические функции, если положить: . Тогда
.
Перейдем к новым постоянным интегрирования A и β , выполнив подстановку:
. Тогда
.
При b = k характеристическое уравнение (К5) имеет два кратных вещественных корня . Общее решение уравнения (К4) имеет вид:
.
Движение также апериодическое. Точка может пройти через положение равновесия x = 0 не более одного раза.
Вынужденные колебания
Рассмотрим случай, когда кроме восстанавливающей силы , на точку действует возмущающая сила, меняющаяся по гармоническому закону:
(К8) . Составим уравнение движения:
.
Введем обозначение h=H/m . Разделив на m , получаем дифференциальное уравнение вынужденных колебаний:
(К9) .
Это линейное неоднородное дифференциальное уравнение с постоянными коэффициентами со специальной неоднородной частью. Его общее решение равно сумме общего решения однородного уравнения и частного (то есть любого, отличного от нулевого) решения данного уравнения:
;
;
.
Общее решение однородного уравнения: .
Ищем частное решение в виде . В результате получаем:
;
.
Коэффициент динамичности. Действие постоянной возмущающей силы величины H приводит к статическому отклонению . Периодическая возмущающая сила (К8) с амплитудой H приводит к периодическим колебаниям с амплитудой . В связи с этим вводят коэффициент динамичности: .
Он показывает, во сколько раз амплитуда колебаний превосходит статическое отклонение.
Явление резонанса и биения
Когда частота возмущающей силы равна частоте собственных колебаний p = k , коэффициент динамичности стремится к бесконечности, амплитуда колебаний неограниченно возрастает. Это явление называется резонансом. Уравнение движения точки при p = k имеет вид:
(К10) .
Оно имеет частное решение
.
Общее решение уравнения (К10):
.
Это уравнение показывает, что амплитуда вынужденных колебаний возрастает пропорционально времени. Фаза вынужденных колебаний отстает от фазы возмущающей силы на π/ 2 .
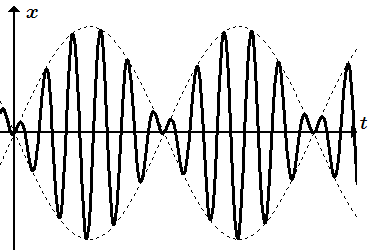
Биения.
Когда частота p возмущающей силы близка к собственной частоте k колебания точки, p/k ≈ 1 , возникает явление, называемое биениями. В этом случае частное решение уравнения (К9) имеет вид:
,
где .
Происходит наложение колебаний. Их можно рассматривать как вынужденные колебания частоты с переменной амплитудой, которая является периодической функцией с частотой .
Вынужденные колебания при наличии вязкого трения
Составим уравнение движения вынужденных колебаний при наличии вязкого трения:
.
Получаем дифференциальное уравнение:
.
Его общее решение имеет вид.
1) при b :
;
2) при b > k :
;
3) при b = k :
.
Здесь ;
ε определяется из уравнений:
.
Величины A и β являются постоянными интегрирования. Они определяются из начальных условий.
Общие теоремы динамики точки
Теорема об изменении количества движения материальной точки
Теорема об изменении количества движения материальной точки в дифференциальной форме
Изменение количества движения материальной точки за бесконечно малый промежуток времени dt равно элементарному импульсу равнодействующей сил, приложенных к этой точке:
.
Эту теорему можно сформулировать так:
Производная по времени от количества движения материальной точки равна равнодействующей сил, приложенных к этой точке:
(Т1) .
Проектируя это векторное уравнение на оси координат, получаем три скалярных уравнения:
.
Если проинтегрировать уравнение (Т1) по времени от начального момента времени t = 0 до конечного момента t = t1 , то получим теорему в интегральной форме.
Теорема об изменении количества движения материальной точки в интегральной форме
изменение количества движения материальной точки за конечный промежуток времени [0,t1] равно импульсу силы, приложенной к этой точке, за тот же промежуток времени:
.
Здесь – скорость точки в моменты времени t = 0 и t = t 1 , соответственно.
Теорема об изменении момента количества движения материальной точки
Теорема об изменении момента количества движения материальной точки
Производная по времени от момента количества движения материальной точки, относительно произвольного центра O , равна моменту равнодействующей силы, приложенной к точке, относительно того же центра:
.
Проектируя это векторное уравнение на оси координат, получаем три скалярных уравнения:
.
Если на точку действует несколько сил , то равнодействующая сила равна их геометрической сумме:
.
Тогда можно записать эту теорему так:
.
Далее будем считать, что точка O выбрана в начале координат. Тогда .
Центральная сила. Второй закон Кеплера
Пусть на точку действует центральная сила с центром в начале координат O . Тогда ее момент относительно O равен нулю. По теореме об изменении момента количества движения материальной точки имеем:
.
Если ввести секторную скорость , то она оказывается постоянной
.
Получаем второй закон Кеплера (закон площадей).
Второй закон Кеплера (закон площадей)
Под действием центральной силы точка движется по плоской кривой с постоянной секторной скоростью. То есть радиус-вектор точки заметает равные площади в любые равные промежутки времени.
Работа силы. Мощность
Основные понятия
Единицей измерения работы в СИ является 1 джоуль (1 Дж = 1 Н·м = кг·м 2 /с 2 ).
Работа силы при движении материальной точки от точки M 1 до точки M 2 равна сумме (интегралу) элементарных работ:
.
Если ввести скорость точки , то
.
Теорема о работе силы
Работа A равнодействующей силы на некотором перемещении равна алгебраической сумме работ Ak составляющих сил на том же перемещении:
.
Мощность – это величина работы, произведенная за единицу времени.
.
Единицей измерения мощности в СИ является 1 ватт (1 Вт = 1 Дж/с). Другие единицы мощности: 1 кВт (киловатт) = 1000 Вт; 1л.с.(лошадиная сила) = 736 Вт = 75 кгс·м/с.
Работа основных видов сил
Работа силы тяжести:
,
где P – сила тяжести, действующая на точку. Если начальная точка выше конечной, то работа положительна; если начальная точка ниже конечной, то отрицательна.
Работа силы упругости:
.
Здесь – деформация пружины в начальном положении; – в конечном.
Работа силы трения. Если сила трения постоянна, то
,
где s – длина пройденного точкой пути; – сила трения, которая всегда направлена в сторону, противоположную перемещению; f – коэффициент трения; N – нормальная реакция поверхности. Работа силы трения всегда отрицательна.
Работа силы тяготения.
На точку, находящуюся вблизи планеты Земля, на расстоянии r ≥ R от ее центра, действует сила притяжения
,
где R = 6371 км – радиус Земли. Тогда при перемещении точки из положения M1 в положение M2, сила тяготения совершит работу
.
Она не зависит от траектории движения тела.
Теорема об изменении кинетической энергии точки
Теорема об изменении кинетической энергии точки в дифференциальной форме
Дифференциал кинетической энергии точки равен сумма элементарных работ всех действующих на точку сил:
.
Проинтегрировав обе части этого уравнения вдоль траектории движения точки от положения M1 до M2, получим теорему в интегральной форме.
Теорема об изменении кинетической энергии точки
Изменение кинетической энергии материальной точки, при переходе ее из начального положения M1 в конечное положение M2, равно сумме работ всех сил, приложенных к точке на этом перемещении:
.
Силовые поля и потенциальная энергия
1. Работа сил стационарного поля при перемещении точки из положения M1 в положение M2 зависит только от начального положения M1, конечного положения M2, и формы траектории, но не зависит от закона движения точки.
2. Работа, совершенная полем при перемещении точки из положения M1 в M2 равна по модулю и обратна по величине работе, совершенной полем при перемещении точки из M2 в M1 при перемещении по той же траектории:
.
Для нестационарных полей эти свойства на выполняются.
Примеры стационарных полей: поле силы тяжести на поверхности Земли; электростатическое поле от неподвижно закрепленного заряда; поле силы упругости пружины, один конец которой закреплен.
Потенциальное силовое поле – это стационарное силовое поле, работа сил которого зависит только от начального M1 и конечного M2 положений точки, и не зависит от формы ее траектории. Потенциальное силовое поле также называют консервативным.
В потенциальном поле существует такая функция, через которую можно выразить вектор силы , действующей на точку.
Силовая функция – это функция, зависящая от координат точки ( x, y, z ) , через которую выражаются проекции силы потенциального поля на оси координат:
.
Отсюда следует, что сила не изменится, если к силовой функции прибавить постоянную. Таким образом, силовая функция определена с точностью до произвольной постоянной.
В потенциальном поле элементарная работа является дифференциалом от силовой функции:
.
Работа при конечном перемещении из точки в точку равна разности силовой функции в этих точках:
.
Таким образом, в потенциальном поле, работа сил поля не зависит от формы траектории. На замкнутом перемещении работа равна 0. Для более наглядной физической интерпретации, вводят понятие потенциальной энергии. Она равна, с точностью до произвольной постоянной, силовой функции, взятой с обратным знаком.
Потенциальная энергия П – это работа, которую нужно совершить при перемещении точки в потенциальном поле из данного положения в произвольным образом выбранное нулевое положение.
Так, для поля деформации, в качестве нулевого положения обычно принимают не деформированное положение; для гравитационного и электростатических полей за нулевое выбирают положение, бесконечно удаленное от тела или заряда. Для силы тяжести в поле Земли принимают любое, удобное для расчета положение. Таким образом, потенциальная энергия равна силовой функции, взятой с обратным знаком плюс постоянная, зависящая от выбора нулевого положения:
.
Пусть – нулевое положение. Тогда
;
.
Работа сил поля при перемещении системы из 1-го положения во 2-ое равна разности потенциальных энергий: .
Эквипотенциальные поверхности – это поверхности равного потенциала:
.
Сила направлена перпендикулярно эквипотенциальной поверхности.
Закон сохранения механической энергии
Если точка находится в потенциальном поле, то сумма ее кинетической и потенциальной энергий является постоянной:
.
Если на точку действуют несколько сил от разных потенциальных полей, то в качестве потенциальной энергии нужно взять сумму потенциальных энергий от каждого силового поля:
.
Основные виды потенциальных полей
В поле силы тяжести, потенциальная энергия зависит от высоты. Направив ось z вертикально вверх, получим: .
Поле силы упругости пружины. В этом поле, потенциальная энергия зависит от деформации λ пружины:
.
В качестве нулевого положения выбирают положение без деформации: λ = 0 .
Сила гравитационного притяжения и космические скорости
Между любыми двумя точками массами m 1 и m 2 , действует сила всемирного тяготения. Так, на точку 2 действует сила притяжения со стороны точки 1:
,
направленная вдоль прямой, проходящей через точку 1. Здесь r – расстояние между точками; Н·м 2 /кг 2 – гравитационная постоянная.
В результате притяжения, обе точки получают ускорения и движутся друг относительно друга. Мы рассмотрим более простой, но важный случай, когда масса M = m 1 одного из тел намного больше массы m = m 2 второго тела. Тогда точка с меньшей массой практически не оказывает влияния на движение более массивной точки. Выберем начало инерциальной системы координат в точке 1. Тогда силу гравитационного притяжения можно рассматривать как центральную силу и представить ее в векторном виде:
(П1) .
Потенциальная энергия точки 2:
(П2) .
Здесь нулевое положение выбрано на бесконечности: .
Формулы (П1) и (П2) справедливы, если объект 1 является шаром с плотностью, зависящей только от расстояния r до его центра. Пусть R – радиус такого шара. Тогда в формулах (П1) и (П2) r – это расстояние от центра шара 1 до точки 2. Они справедливы при .
Эти формулы можно использовать при расчете движения спутников вокруг Земли. Поскольку Земля вращается вокруг своей оси, то ее форма является эллипсоидом. Но в первом приближении Землю можно считать шаром радиуса R = 6371 км. Из таких допущений можно оценить космические скорости, необходимые для выведения летательных аппаратов на космические орбиты.
Первая космическая скорость – это скорость, которую необходимо сообщить телу на поверхности Земли, чтобы оно вышло на круговую орбиту. Она равна км/с. Если у тела первая космическая скорость, то оно может вращаться по круговой орбите, не падая на Землю, то есть стать ее спутником.
Вторая космическая скорость – это скорость, которую необходимо сообщить телу на поверхности Земли, чтобы оно вышло на параболическую орбиту. Она равна км/с. Если у тела скорость больше второй космической, то ее траекторией является гипербола, и, при отсутствии помех, оно будет удаляться от Земли и никогда не вернется назад.
Однако Солнце является той преградой, которая не даст спутнику со второй космической скоростью удалиться на бесконечное расстояние. Чтобы тело могло покинуть пределы солнечной системы, ему необходимо сообщить третью космическую скорость км/с.
Использованная литература:
А. А. Яблонский, Курс теоретической механики, часть II, динамика. Москва, «Высшая школа», 1966.
С. М. Тарг, Краткий курс теоретической механики, «Высшая школа», 2010.
Автор: Олег Одинцов . Опубликовано: 11-12-2019
http://isopromat.ru/teormeh/kratkaja-teoria/differencialnye-uravnenia-otnositelnogo-dvizhenia-materialnoj-tochki
http://1cov-edu.ru/mehanika/dinamika-tochki/