Автоматические регуляторы и типовые законы регулирования
А.Р. Герке, А.В. Лира, М.Ю. Перухин
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ И ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
Федеральное агентство по образованию
Государственное образовательное учреждение
Высшего профессионального образования
«Казанский государственный технологический университет»
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ И ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
Лабораторная работа № 8
Автоматические регуляторы и типовые законы регулирования
Цель работы:
1) Ознакомиться с основными элементами автоматической системы регулирования.
2) Ознакомиться с типовыми законами регуляторов.
3) Изучить микропроцессорные измерительно-регулирующие устройства (на примере микропроцессорного измерителя-регулятора типа ТРМ 10).
Теоретическая часть
Автоматический регулятор – это устройство, которое, сравнивая текущее значение регулируемой величины с заданным, воздействует на технологический процесс таким образом, что текущее значение регулируемой величины автоматически поддерживается равным заданному.
Система автоматического регулирования (САР) – совокупность объекта регулирования и авторегулятора, взаимодействующих между собой.
На рис.1 представлена структурная схема замкнутой САР.
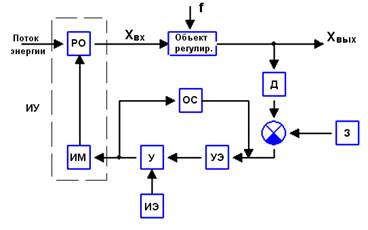
Рис. 1. Функциональная схема САР. Обозначение элементов схемы: Д- датчик; ЭС- элемент сравнения; З- задатчик; УЭ- управляющий элемент; У- усилитель; ИУ- исполнительное устройство; ОС- обратная связь; ИЭ- источник энергии; f- возмущение (внешний фактор).
Задачей автоматического регулирования является поддержание заданных параметров, определяющих условия протекания технологического процесса без участия человека. Факторы, влияющие на состояние процесса в объекте, называются воздействиями.
На рис.2 приведена упрощенная структурная схема САР.

Рис. 2. Структурная схема САР.
На объект регулирования действует возмущающее воздействие f, в результате чего возникает разность между текущим sи заданным sззначениями регулируемой величины — сигнал рассогласования:
Ds =(s — sз).
По величине сигнала рассогласования регулятор вырабатывает регулирующее воздействие m. При необходимости изменить параметр регулирования Хвых изменяют величину задающего воздействия sз.
Одной из основных характеристик регулятора является закон регулирования.
Закон регулирования – функциональная связь между входными выходным значениями регулятора. Под входной величиной регулятора понимается сигнал рассогласования Ds,а под выходной величиной — его регулирующее воздействие m, которое вызывает перемещение регулирующего органа. При этом целенаправленно изменяются материальные, энергетические потоки вводимые в объект регулирования или выводимые из него, вследствие чего регулируемая величина возвращается к заданному значению. Следовательно, закон регулирования выражается зависимостью: m = ƒ(Ds). По виду этой зависимости в теории автоматического регулирования различают пять видов законов регулирования и соответственно пять видов регуляторов с непрерывным законом регулирования: П – пропорциональный, И – интегральный, ПИ – пропорционально-интегральный, ПД – пропорционально-дифференциальный, ПИД – пропорционально-интегрально-дифференциальный.
1. Пропорциональный закон регулирования (П-регулятор)
П-регулятор – регулятор, у которого выходная величина изменяется пропорционально входной.
Ниже приведена структурная схема САР с использованием П-регулятора и переходная характеристика (рис. 3-4).
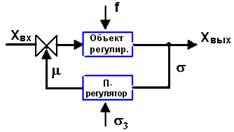
Рис.3. Структурная схема
 (1)
(1)
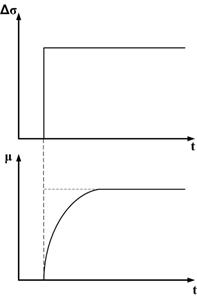
Рис. 4. Переходная характеристика
Достоинства: хорошо работает в неустановившихся режимах, простота конструкции и низкая стоимость
Недостатки: наличие остаточного отклонения регулируемого параметра, т.е. текущее значение регулируемой величины немного не достигает заданного значения.
2. Интегральный закон регулирования (И-регулятор)
И-регулятор – регулятор, у которого изменение регулирующего воздействия m пропорционально интегралу входной величины Ds.
Ниже приведены структурная схема САР (рис. 5) с использованием И-регулятора и переходная характеристика для идеального (рис. 6) и реального (рис.7) интегрального регулятора.
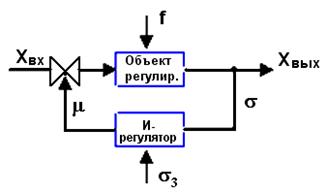
Рис. 5. Структурная схема.
 (2)
(2)
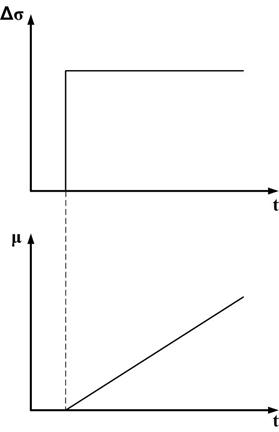
Рис. 6. Переходная характеристика
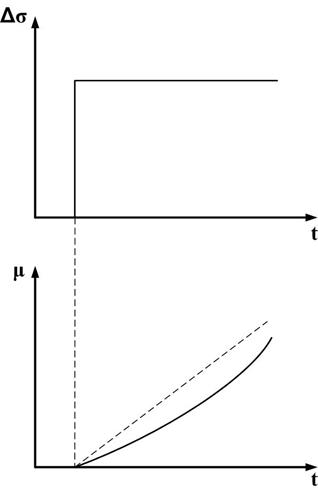
Рис. 7. Переходная характеристика
Достоинства: высокая точность, отсутствие остаточного отклонения регулируемого параметра.
Недостатки: плохо работает в неустановившихся режимах, низкая скорость регулирования
3. Пропорционально-интегральный закон регулирования (ПИ-регулятор)
ПИ-регулятор— регулятор представляет совокупность П- и И-регуляторов.
Ниже приведены структурная схема САР (рис. 8) с использованием ПИ-регулятора и переходная характеристика для идеального (рис. 9) и реального (рис.10) пропорционально-интегрального регулятора.
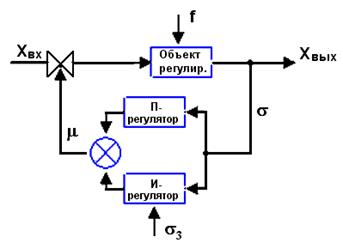
Рис. 8. Структурная схема.
 (3)
(3)
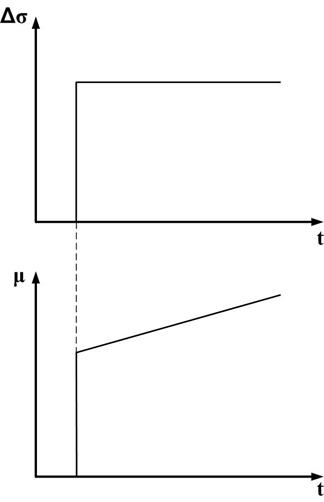
Рис. 9. Переходная характеристика
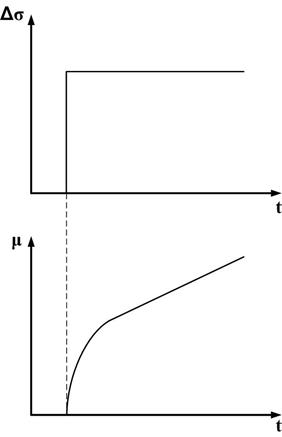
Рис. 10. Переходная характеристика
Достоинства: хорошо работает в неустановившимся режиме, имеет высокую точность без остаточного отклонения, качество выше чем у П и И регуляторов.
Недостатки: процесс регулирования осуществляется дольше, чем у П — регулятора.
4. Пропорционально-дифференциальный закон регулирования (ПД-регулятор)
ПД – регулятор – регулятор, у которого изменение регулирующего воздействия m пропорционально отклонению регулируемой величины Ds и скорости этого отклонения.
Регулирующий орган перемещается с некоторым опережением (предварением) пропорциональным скорости изменения регулируемой величины, поэтому действие предварения представляет временное увеличение коэффициента усиления регулятора.
Ниже приведены структурная схема САР (рис. 11) с использованием ПИ-регулятора и переходная характеристика для идеального (рис. 12) и реального (рис.13) пропорционально-дифференциального регулятора.
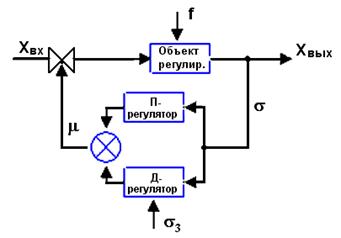
Рис. 11. Структурная схема.
 (4)
(4)
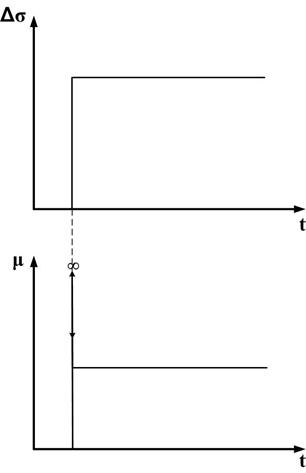
Рис. 12. Переходная характеристика
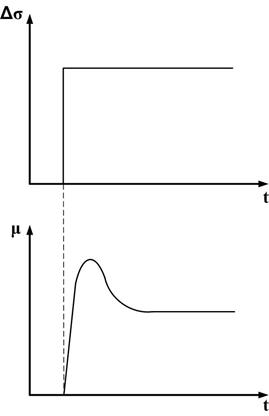
Рис. 13. Переходная характеристика
Достоинства: сокращенное время регулирования.
Недостатки: вероятность появления ошибки регулирования, если временные свойства объекта не постоянны.
5. Пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор)
ПИД – регулятор – регулятор, у которого регулирующее воздействие пропорционально отклонению регулируемого параметра, интегралу и скорости этого отклонения.
Ниже приведены структурная схема САР (рис. 14) с использованием ПИД-регулятора и переходная характеристика для идеального (рис. 15) и реального (рис.16) пропорционально-интегрально-дифференциального регулятора.
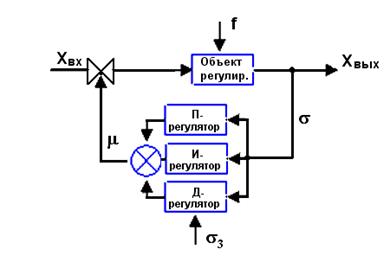
Рис. 14. Структурная схема.
 (5)
(5)
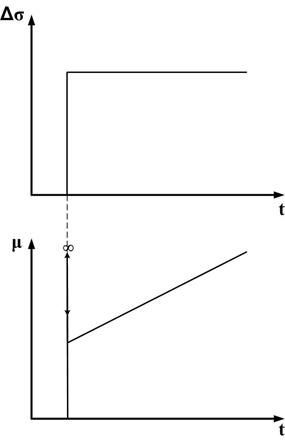
Рис. 15. Переходная характеристика
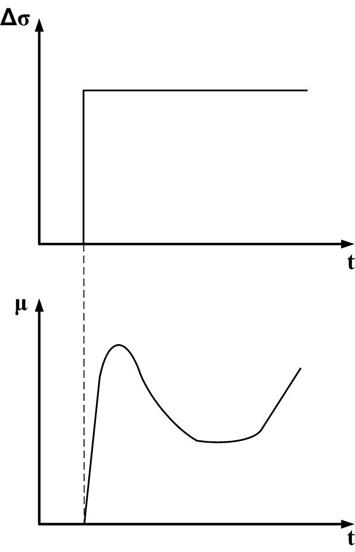
Рис. 16. Переходная характеристика
Достоинства: сочетает достоинства П-, И-, ПД-, ПИ- регуляторов.
Недостатки: высокая стоимость.
Содержание работы
1. Изучить устройство лабораторной установки и размещенных на ней средств автоматизации.
2. Экспериментально определить динамические переходные характеристики П-, И-, ПИ-, ПД-, ПИД-регуляторов.
3. Экспериментально определить статические характеристики П и ПД регуляторов.
4. На основе экспериментальных данных построить графики статических и динамических переходных характеристик и сравнить их с характеристиками идеальных регуляторов.
Дата добавления: 2015-08-01 ; просмотров: 10418 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
2. Математическое описание систем автоматического управления
Публикую первую часть второй главы лекций по теории автоматического управления.
В данной статье рассматриваются:
2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
2.2. Линеаризация уравнений динамики САУ (САР)
2.3. Классический способ решения уравнений динамики
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.

2.1. Получение уравнений динамики системы. Статическая характеристика. Уравнение динамики САУ (САР) в отклонениях
При составлении уравнений, описывающих нестационарные процессы в САУ (САР) и которые в дальнейшем будем называть уравнениями динамики, система “разбивается” на отдельные элементы (звенья), для каждого из которых не существует проблем в записи соответствующего уравнения динамики.
На рис. 2.1.1 представлено схематичное представление САУ (звена) в переменных «вход-выход», где x(t) (или u(t)) — входное воздействие, а y(t) — выходное воздействие, соответственно. Нередко входное воздействие будет называться управляющим, а выходное воздействие — регулируемой величиной (переменной).

При составлении уравнений динамики используются фундаментальные законы сохранения из разделов “Механики”, “Физики”, “Химии” и др.
Например, при описании перемещения узла какого-то механизма силового привода используются законы сохранения: момента, энергии, импульса и др… В теплофизических (теплогидравлических) системах используются фундаментальные законы сохранения: массы (уравнение неразрывности), импульса (уравнение движения), энергии (уравнение энергии) и др
Уравнения сохранения в общем случае содержат постоянные и нестационарные члены, причем при отбрасывании нестационарных членов получают так называемые уравнения статики, которые соответствуют уравнениям равновесного состояния САУ (звена). Вычитанием из полных уравнений сохранения стационарных уравнений получают нестационарные уравнения САУ в отклонениях (от стационара).

где:  — стационарные значения входного и выходного воздействий;
— стационарные значения входного и выходного воздействий;
 — отклонения от станционара, соотвесвенно.
— отклонения от станционара, соотвесвенно.
В качестве примера рассмотрим «технологию» получения уравнений динамики для механического демпфера, схематическое изображение которого представлено на рис. 2.1.2.

Согласно 2-му закону Ньютона, ускорение тела пропорционально сумме сил, действующих на тело:

где, m — масса тела, Fj — все силы воздействующие на тело (поршень демпфера)
Подставляя в уравнение (2.1.1) все силы согласно рис. 2.2, имеем:

где  — сила тяжести;
— сила тяжести;  — сила сопротивления пружины,
— сила сопротивления пружины,  — сила вязконо трения (пропорциональна скорости поршеня)
— сила вязконо трения (пропорциональна скорости поршеня)
Размерности сил и коэффициентов, входящих в уравнение (2.1.2):

Предполагая, что при t ≤ 0 поршень демпфера находился в равновесии, то есть

перейдем к отклонениям от стационарного состояния:
Пусть при t>0  . Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:
. Тогда, подставляя эти соотношения в уравнение (2.1.2), получаем:

если  , то уравнение принимает вид:
, то уравнение принимает вид:


Соотношение (2.1.4) – уравнение звена (демпфера) в равновесном (стационарном) состоянии, а соотношение (2.1.5) – статическая характеристика звена – демпфера (см. рисунок 2.1.3).

Вычитая из уравнения (2.1.3) уравнение (2.1.4), получаем уравнение динамики демпфера в отклонениях:

тогда, разделив на k, имеем:


Уравнение (2.1.6) — это уравнение динамики в канонической форме, т.е. коэффициент при Δy(t) равен 1.0!
«Легко» видеть, что коэффициенты перед членами, содержащими производные, имеют смысл (и размерность!) постоянных времени. В самом деле:


Таким образом, получаем, что:
— коэффициент перед первой производной имеет размерность [c] т.е. смысл некоторой постоянной времени;
— коэффициент перед второй производной: [ ];
];
— коэффициент в правой части ( ): [
): [ ].
].
Тогда уравнение (2.1.6) можно записать в операторной форме:
 , что эквивалентно
, что эквивалентно

где:  — оператор диффренцирования;
— оператор диффренцирования;
 -линейный дифференциальный оператор;
-линейный дифференциальный оператор; 
 — линейный дифференциальный оператор, вырожденный в константу, равную .
— линейный дифференциальный оператор, вырожденный в константу, равную .
Анализ уравнения (2.1.6.а) показывает, что такое уравнение имеет размерные переменные, а также размерными являются все коэффициенты уравнения. Это не всегда удобно. Кроме того, если реальная САР (САУ) состоит из многих звеньев, выходными воздействиями которых являются различные физические переменные (скорость, температура, нейтронный поток, тепловой поток и т.д.), то значения коэффициентов могут различаться на большое число порядков, что ставит серьезные математические проблемы при численном решении уравнений динамики на компьютере (поскольку числа в компьютере всегда представляются с какой-то точностью). Одним из наилучших способов избежать численных трудностей является принцип нормализации, т.е. переход к безразмерным отклонениям, которые получены нормированием отклонения на стационарное значение соответствующей переменной.
Введем новые нормированные (безразмерные) переменные:

Подставляя эти соотношения в уравнение (2.1.2), имеем:


Поддчеркнутые члены выражения в сумме дают 0 (см. 2.1.4) Перенося в левую часть члены, содержащие  , и, разделив на
, и, разделив на  , получаем:
, получаем:


где:  — коэффициент усиления, причем безразмерный.
— коэффициент усиления, причем безразмерный.
Проверим размерность коэффициента 

Использованный выше «технический» прием позволяет перейти к безразмерным переменным, а также привести вид коэффициентов в уравнении динамики к легко интерпретируемому виду, т.е. к постоянным времени (в соответствующей степени) или к безразмерным коэффициентам усиления.
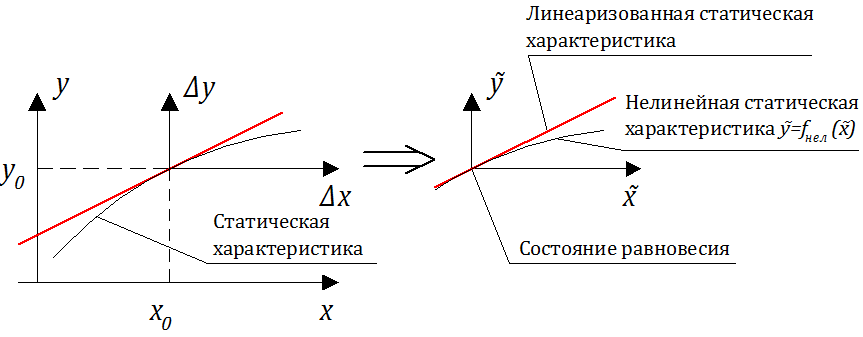
На рис. 2.1.4 представлены статические характеристики для механического демпфера:
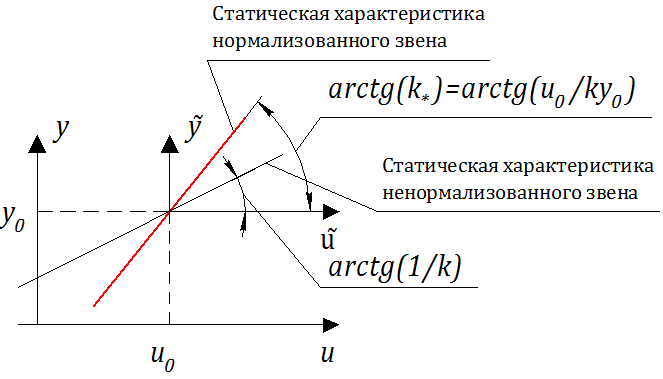
Процедура нормировки отклонений позволяет привести уравнения динамики к виду:

где  дифференциальные операторы.
дифференциальные операторы.
Если дифференциальные операторы — линейные, а статическая характеристика САУ (звена) – тоже линейна, то выражение (2.1.8) соответствует линейному обыкновенному дифференциальному уравнению (ОДУ).
А если – нелинейные дифференциальные операторы, или  , то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
, то уравнение динамики — нелинейное. Под нелинейными действиями понимаются все математические действия, кроме сложения (+) и вычитания (-).
Пример создания модели демпфера можно посмотереть здесь: «Технология получения уравнений динамики ТАУ»
2.2. Линеаризация уравнений динамики САУ (САР)
Практически все реальные системы автоматического управления (САУ) являются нелинейными, причем нелинейность САУ может определяться различными причинами:
- Нелинейностью статической характеристики.
- Нелинейностью динамических членов в уравнениях динамики.
- Наличием в САУ принципиально нелинейных звеньев.
Если в замкнутой САУ (САР) нет принципиально нелинейных звеньев, то в большинстве случаев уравнения динамики звеньев, входящих в систему, могут быть линеаризованы. Линеаризация основана на том, что в процессе регулирования (т.е. САУ с обратной связью) все регулируемые величины мало отклоняются от их программных значений (иначе система регулирования или управления не выполняла бы своей задачи).
Например, если рассмотреть управление мощностью энергетического ядерного реактора, то главная задача САР — поддержание мощности на заданном (номинальном) уровне мощности. Существующие возмущения (внутренние и внешние) “отрабатываются” САР и поэтому параметры ядерного реактора незначительно отличаются от стационарных. На рис. 2.2.1 представлена временная зависимость мощности ядерного реактора, где нормированные отклонения мощности ΔN /N0 Рис. 2.2.1 – Пример изменения мощности реактора
Рассмотрим некоторое звено (или САР в целом), описание динамики которого можно представить в переменных “вход-выход”:
Предположим, что динамика данного звена описывается обыкновенным дифференциальным уравнением n-го порядка:

Перенесем  в левую часть уравнения и запишем уравнение в виде%
в левую часть уравнения и запишем уравнение в виде%

где  -– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
-– функция регулируемой переменной и ее производных, а также управляющего (входного) воздействия и его производных, причем F – обычно нелинейная функция.
Будем считать, что при t ≤ 0 САУ (звено) находилось в равновесии (в стационарном состоянии). Тогда уравнение (2.2.2) вырождается в уравнение статической характеристики:

Разложим левую часть уравнения (2.2.2) в ряд Тейлора в малой окрестности точки равновесного состояния  .
.
Напомним, что разложение в ряд Тейлора трактуется следующим образом: если  , то «простое» разложение функции в ряд Тейлора в окрестности точки
, то «простое» разложение функции в ряд Тейлора в окрестности точки  будет выглядеть так:
будет выглядеть так:

C учетом вышеприведенного разложение принимает вид:

Предполагая, что отклонения выходных и входных воздействий незначительны, (т.е.: ), оставим в разложении только члены первого порядка малости (линейные). Поскольку
), оставим в разложении только члены первого порядка малости (линейные). Поскольку  , получаем:
, получаем:

Подставляя соотношение (2.2.4) в уравнение (2.2.2), и перенося множители при у и u в разные части получаем уравнения:


Коэффициенты  — постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
— постоянные коэффициенты, поэтому уравнения 2.2.5 — линейное дифференциальное с постоянными коэффициентами.
В дальнейшем нами будет часто использоваться операторная форма записи уравнений динамики:

где  – оператор дифференцирования;
– оператор дифференцирования;
— линейный дифференциальный оператор степени n;
— линейный дифференциальный оператор степени m, причем обычно порядок оператора выше порядка оператора : 
Уравнения (2.2.5) и (2.2.6) — уравнения динамики системы (звена) в отклонениях.
Если исходное уравнение (2.2.1) — дифференциальное уравнение в физических переменных (температура, скорость, поток и т.д.), то размерность коэффициентов может быть произвольной (любой).
Переход к нормализованным отклонениям позволяет “упорядочить” размерность коэффициентов. В самом деле, разделив уравнение (2.2.5) на начальные условия (значения в нулевой момент времени) и выполнив некоторые преобразования, получаем:

Приведение уравнения динамики САУ (звена) к нормализованному виду позволяет “унифицировать” размерность коэффициентов уравнений: ==>

Если вынести в правой части (2.2.7) коэффициент  за общую скобку и разделить все уравнение на
за общую скобку и разделить все уравнение на  , то уравнение принимает вид:
, то уравнение принимает вид:


или в операторном виде:

Линеаризация уравнений динамики и нормализация переменных позволяют привести уравнения динамики САУ (звена) к виду, наиболее удобному для использования классических методов анализа, т.е. к нулевым начальным условиям.

Пример
Выполнить линеаризацию уравнения динамики некоторой «абстрактной» САР в окрестности состояния (x0, y0), если полное уравнение динамики имеет вид:

Нелинейность полного уравнения динамики проявляется в следующем:
• во-первых, в нелинейности статической характеристики:

• во-вторых, слагаемое в левой части  — чисто нелинейное, так как действие умножения является нелинейным.
— чисто нелинейное, так как действие умножения является нелинейным.
Выполним процесс линеаризации исходного уравнения, динамики без разложения я ряд Тейлора, основываясь на том, что в окрестности состояния (x0, y0) нормированные отклонения управляющего воздействия и регулируемой величины намного меньше 1.
Преобразования выполним в следующей последовательности:
- Перейдем к безразмерным переменным (нормализованным);
- Выполним линеаризацию, отбросив нелинейные члены 2-го и выше порядков малости.
Перейдем к новым безразмерным переменным:

Заметим, что:  .
.
Подставляя значения x(t) и y(t) в исходное уравнение:

Удаляем полученного уравнения уравнения стационара:  , а так же пренебрегая слагаемыми второго прядка малости:
, а так же пренебрегая слагаемыми второго прядка малости:  , получаем следующее уравнение:
, получаем следующее уравнение:

Вводим новые обозначения:

Получаем уравнения в «почти» классическом виде:

Если в правой части вынести за общую скобку и разделить все уравнение на , то уравнение (линеаризованное) принимает вид:


Процедура нормализации позволяет более просто линеаризовать уравнение динамики, так как не требуется выполнять разложение в ряд Тейлора (хотя это и не сложно).
2.3. Классический способ решения уравнений динамики
Классический метод решения уравнений динамики САУ (САР) применим только для линейных или линеаризованных систем.
Рассмотрим некоторую САУ (звено), динамика которой описывается линейным дифференциальным уравнением вида:

Переходя к полной символике, имеем: 

Выражение (2.3.2) — обыкновенное дифференциальное уравнение (ОДУ), точнее неоднородное ОДУ, так как правая часть ≠ 0.
Известно входное воздействие x(t), коэффициенты уравнения и начальные условия (т.е. значения переменных и производных при t = 0).
Требуется найти y(t) при известных начальных условиях.

где:  — решение однородного дифференциального уравнения
— решение однородного дифференциального уравнения  y_<част.>(t) $inline$ — частное решение. $inline$
y_<част.>(t) $inline$ — частное решение. $inline$
Будем называть решение однородного дифференциального уравнения  , собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
, собственным решением, так как его решение не зависит от входного воздействия, а полностью определяется собственными динамическими свойствами САУ (звена).
Вторую составляющую решения (2.3.3) будем называть  , вынужденным, так как эта часть решения определяется внешним воздействием
, вынужденным, так как эта часть решения определяется внешним воздействием  , поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:
, поэтому САУ (САР или звено) “вынуждена отрабатывать” это воздействие:

Напомним этапы решения:
1) Если имеется уравнение вида  , то сначала решаем однородное дифференциальное уравнение:
, то сначала решаем однородное дифференциальное уравнение:

2) Записываем характеристическое уравнение:

3) Решая уравнение (2.3.5), которое является типичным степенным уравнением, каким-либо способом (в том числе и с помощью стандартных подпрограмм на компьютере) находим корни характеристического уравнения 
4) Тогда собственное решение записывается в виде:

если среди нет повторяющихся корней (кратность корней равна 1).
Если уравнение (2.3.5) имеет два совпадающих корня, то собственное решение имеет вид:

Если уравнение (2.3.5) имеет k совпадающих корней (кратность корней равна k), то собственное решение имеет вид:

5) Вынужденную часть решения можно найти различными способами, но наиболее распространены следующие способы:
а) По виду правой части.
б) Методом вариации постоянных.
в) Другие методы…
Если вид правой части дифференциального уравнения – относительно несложная функция времени, то предпочтительным является способ а): подбор решения.  .
.
6) Суммируя полученные составляющие (собственную и вынужденную), имеем:

7) Используя начальные условия (t = 0), находим значения постоянных интегрирования  . Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
. Обычно получается система алгебраических уравнений. Решая систему, находим значения постоянных интегрирования
Пример
Найти аналитическое выражение переходного процесса на выходе звена, если

Решение. Запишем однородное ОДУ: 
Характеристическое уравнение имеет вид:  ; Решая, имеем:
; Решая, имеем:  тогда:
тогда:

где  — неизвестные (пока) постоянные интегрирования.
— неизвестные (пока) постоянные интегрирования.
По виду временной функции в правой части запишем  как:
как:

Подставляя в исходное уравнение, имеем:

Суммируя  , имеем:
, имеем: 
Используя 1-е начальное условие (при t = 0), получаем:  , а из 2-го начального условия имеем:
, а из 2-го начального условия имеем: 
Решая систему уравнений относительно  и
и  , имеем:
, имеем: 
Тогда окончательно:

Что бы проверить результ, выполним моделирование процесса в SimInTech, для этого преобразуем исходное уравнение к виду:

Создадим модель SimInTech, содержащую исходное динамическое уравнение и полученное аналитическое решение, и выведем результаты на один график (см. рис. 2.3.1).
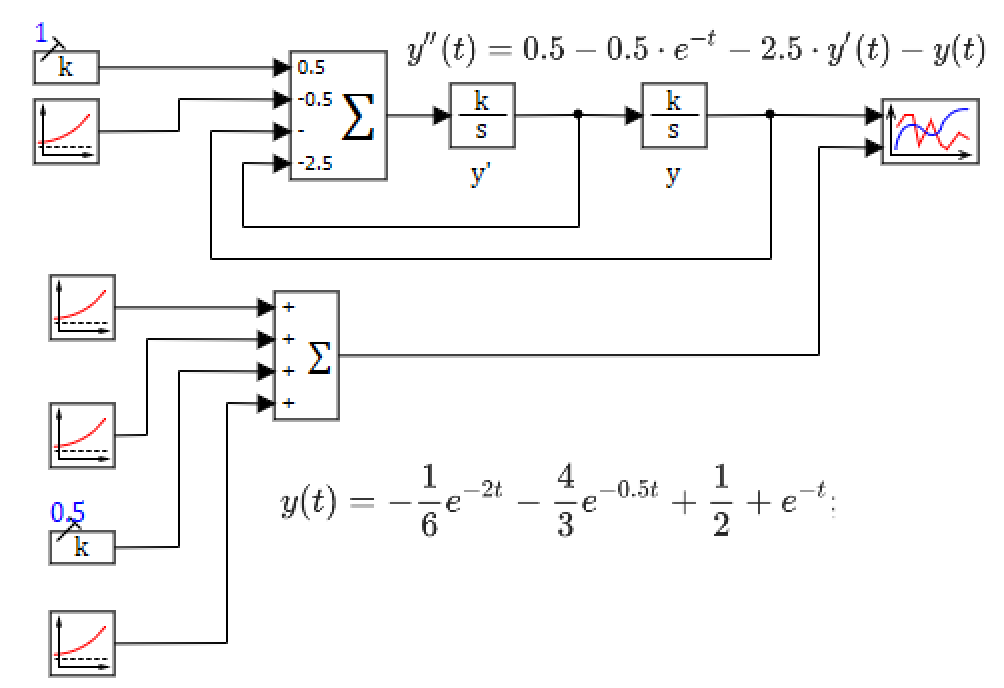
Рис. 2.3.1 – структурная схема для проверки решения
На рис. 2.3.2 приведено решение по вышеприведенному соотношению и численное решение задачи в среде SimInTech (решения совпадают и линии графиков «наложены» друг на друга).
Законы автоматического регулирования

Законы автоматического регулирования
Может оказаться, что одни автоматические системы хорошие, а другие плохие, то казалось бы всегда нужно использовать только самые хорошие, а о других — плохих не следовало бы даже. и говорить. Сначала необходимо разобраться с тем, что считать хорошие, а что плохие автоматические системы. Вообще-то хороший автоматический регулятор это такой, который обеспечивает получение достаточно хороших характеристик процесса автоматического регулирования и вместе с тем прост по своей конструкции. Нужно иметь в виду и то, что различные объекты регулирования имеют неодинаковые характеристики, и поэтому автоматический регулятор, обеспечивающий удовлетворительную работу одного из них, может быть непригодным для другого. Это тоже необходимо учитываться при выборе типа системы автоматического регулирования. Поэтому в различных случаях можно считать лучшими различные автоматические системы. В некоторых случаях можно обойтись простейшими, а в других — требуются более сложные системы автоматического регулирования.
Задачей автоматической системы, как уже отмечалось, является поддержание заданного значения регулируемой величины у(t) или изменение ее по определенному закону, который заранее задается или в зависимости от изменения внешних условий.
Программы могут быть функциями времени у = у(t) или параметрическими у = у(s1 , s2 , . . . t).
Примером временной программы может служить программа изменения регулируемой величины, обеспечивающая заданный режим начального разгона объекта регулирования при пуске до наступления режима нормальной эксплуатации. Например, регулятор частоты вращения коленчатого вала дизеля тепловоза. Во всех подобных устройствах в составе автоматического регулятора или автоматической системы имеется программное устройство, в которое заранее заложена требуемая временная программа.


Примером параметрической программы автоматического регулирования может служить задание требуемого значения скорости движения локомотива с поездом не во времени, а в зависимости от пройденного пути, чтобы прибыть в заданное время на данную станцию.
Большинство известных систем автоматического регулирования работают по принципу отклонения. Это значит, что она вступает в действие после того, как произошло отклонение регулируемой величины от заданного значения, как говорят, при наличии рассогласования Dx(t)между заданным x(t) и фактическим y(t) значением регулируемой величины.
Для наиболее часто применяемых систем автоматического регулирования иногда используются названия, отражающие их особенности, связанные со способом формирования в автоматической системе управляющих воздействий, которые передаются исполнительному устройству.
Пусть Dx(t), представляет отклонение регулируемой величины y(t) от заданного значения x(t), аh(t) воздействие со стороны автоматической системы на объект регулирования. Величина Dx(t)может изменяться в зависимости от времени по-разному.
Законом регулирования называется математическое выражение, описывающее зависимость между входом автоматического регулятора Dx(t) = x(t) — xoc(t) и его выходомy(t).
Различают линейные и нелинейные законы регулирования.
Все законы автоматического регулирования можно разделить на:
1. Простейшие:
— пропорциональный;
— интегральный;
— дифференциальный;
2. Промышленные:
— пропорционально-интегральный;
— пропорционально-дифференциальный;
— пропорционально-интегрально-дифференциальный.
Для линейных законов автоматического регулирования детально разработаны многочисленные прикладные методы исследования, анализа и синтеза, различные расчетные и экспериментальные приемы определения устойчивости, точности и качества работы, а также схемы технических устройств их формирования и реализации.
Пропорциональный закон. Чаще всего такой функциональной зависимостью является простая пропорциональная зависимость, при которой регулируемая величина y(t) должна воспроизводить обычно на более высоком уровне мощности изменения заданной величины x(t) или рассогласования Dx(t).

Если считать, что h(t)изменяется пропорциональноDx(t), то такой регулятор называютпропорциональнымили П-регулятором. Выражение пропорциональной зависимости между величинами h(t) и Dx(t) имеет следующий видh(t) = k Dx(t), где k — коэффициент усиления регулятора.
Пропорциональным автоматическим регулятором может служить обычное усилительное звено с изменяемым коэффициентом усиления, включенное в отрицательную обратную связь по отношению к объекту регулирования.
Проследим за тем, что происходит с исполнительным органом, когда регулируемая величина y(t)скачком изменяется на Dy и принимает значение y + Dy. В простейшем регуляторе, работающем по принципу отклонения, в процессе регулирования величина h(t) тем больше, чем больше отклонение Dx(t).
Принцип работы пропорционального регулятора
Как можно заключить из приведенной формулы, что нормальное функционирование данного регулятора возможно только в случае, когда Dx(t) > 0. Таким образом, автоматическая система имеет постоянную (статическую) ошибку, которую называют статизмом регулятора, а системаавтоматического регулирования называется статической системой.
Автоматическая система называется статической, если при любом постоянном задающем воздействии установившаяся ошибка поддержания регулируемой величины не равна нулю и зависит от величины этого воздействия.
Статизм выражается в процентах и определяется по формуле:


В статической по отношению к управляющему воздействию автоматической системе при воздействии, стремящемся с течением времени к некоторому значению, ошибка также стремится к постоянному значению, зависящему от значения управляющего воздействия, т. е. статическая автоматическая система не может обеспечить постоянства регулируемой величины при переменной во времени нагрузке.
Говоря о статической ошибке регулирования, считают, что после каждого изменения внешнего возмущения или отклонения от заданного режима работы, которое вызывается другими причинами, снова устанавливается постоянное значение регулируемой величины, пусть не то, что было раньше, но постоянное, и остается дальше неизменным.
Статическая автоматическая система имеет нулевой порядок астатизма. Это означает, что в прямой цепи автоматического регулирования нет интегрирующих звеньев. Она может содержать только статические звенья: усилительные, форсирующие или колебательные.
Для повышения точности поддержания заданного значения регулируемой величины, как следует из приведенного уравнения, увеличивают коэффициент усиления k. Однако при этом может возрасти динамическая погрешность, так как даже малое изменение регулируемой величины приводит к значительному изменению управляющего воздействия h(t), что может неблагоприятно сказаться на характеристиках переходных процессов, вызывая дополнительные колебания регулируемой величины.

Интегральный закон. С тем, чтобы исключить указанный недостаток систем автоматического регулирования прямого действия, были созданы автоматические системы непрямого действия, в которых между чувствительным элементом и исполнительным органом включается дополнительное звено (в большинстве случаев выполняющее операцию интегрирования погрешности регулирования Dx(t), работающее с независимым источником энергии). Это может быть гидравлический или пневматический сервомотор, электродвигатель постоянного или переменного тока и т. п. В интегральных регуляторах (И-регуляторах) управляющее воздействие формируется по следующему закону

Интегральным регулятором может служить интегрирующее звено с переменным передаточным коэффициентом в обратной связи.
Принцип работы интегрального регулятора
Переходный процесс в автоматической системе с И-регулятором характеризуется отсутствием статической ошибки регулирования и наибольшим значением отклонения регулируемой величины от установившегося значения по сравнению с другими законами регулирования. И-регуляторы в практике автоматического регулирования не применяются, т. к. они обладают плохими динамическими качествами и в большинстве случаев способствуют возникновению в автоматической системе незатухающих колебаний.

Пропорционально-интегральный закон. Инженеры и ученые давно поняли, что статическая автоматическая система не может быть абсолютно точной, если иметь в виду сведение к нулю статической ошибки, а интегральные регуляторы способствуют возникновению колебательных режимов. Тогда начались поиски способов улучшения работы автоматических систем. Было замечено, что отрицательное влияние на динамические свойства автоматической системы оказывают инерционные элементы, особенно в регуляторах прямого действия.
В процессе регулирования пропорционально-интегральной автоматической системы (ПИ-регуляторы) осуществляется два действия: одно, характерное для П-регулятора, следовательно, можно говорить о П-составляющей процесса регулирования, и второе, осуществляющееинтегрирование величины рассогласования Dx(t) интегральная составляющая.
В ПИ-регуляторах регулирующее воздействие формируется по следующему закону.

Пропорционально-интегральный закон регулирования представляет собой параллельное соединение пропорциональной и интегральной составляющих.
Пропорционально-интегральный регулятор сочетает в себе достоинства пропорциональных и интегральных законов автоматического регулирования, а именно: пропорциональная составляющая обеспечивает достаточное быстродействие регулятора, а интегральная составляющая ликвидирует статическую ошибку регулирования.
В начале процесса автоматического регулирования основную роль играет пропорциональная составляющая, так как интегральная составляющая зависит не только от абсолютного значения рассогласования между заданным и фактическим значением регулируемой величины, но и от времени. С увеличением времени возрастает роль интегральной составляющей, обеспечивающей устранение статической ошибки.
Подбором коэффициентов k1 и k2 можно изменять удельный вес каждой составляющей.
При использовании такой автоматической системы полностью устраняется статическая погрешность регулирования. Автоматическая система является астатической, в которой Dx(t) = 0.
Автоматическая система называется астатической, если при любом постоянном задающем или возмущающем воздействии установившаяся ошибка поддержания регулируемой величины равна нулю и не зависит от величины этого воздействия.
Астатические системы могут быть первого, второго и более высокого порядка астатизма.
Астатическая система первого порядка не имеет ошибки по положению, однако имеют постоянную ошибку по скорости и возрастающую ошибку по ускорению.
Астатическая система второго порядка не имеет ошибок по положению и по скорости, однако имеют постоянную ошибку по ускорению.
Автоматическая система будет астатической по отношению к управляемому воздействию, если при внешнем воздействии, стремящемуся к установившемуся значению, ошибка стремится к нулю независимо от значения внешнего воздействия. Статические системы обычно имеют менее сложное конструктивное решение, чем астатические. Они обладают погрешностью в поддержании постоянства значения регулируемой величины при разных внешних нагрузках. Изменение регулируемой величины, которое вызывает у статической системы перемещение управляемого органа из одного предельного положения в другое, является важнейшей характеристикой статической системы и называется его неравномерностью. Отношение этой неравномерности к номинальному значению регулируемой величины называют степенью неравномерности (коэффициентом статизма или статизмом).
Если иметь в виду отсутствие статической погрешности регулирования, то такая автоматическая система является абсолютно точной. Но, как показал опыт, при такой схеме построения автоматической системы трудно получить удовлетворительные динамические качестварегулирования. Это обусловлено тем, что к положению нового равновесного состояния рассогласование Dx(t) должно приближаться с нулевой скоростью. Иначе в автоматической системе возникают незатухающие колебания регулируемой величины. В общем возможности применения таких автоматических систем весьма ограничены.
В любом автоматическом регуляторе имеется внутренняя обратная связь, благодаря которой золотник принудительно возвращается в положение перекрыши, т. е. в равновесное состояние. Такой регулятор обеспечивает хорошие динамические свойства, но при его использовании возникает статическая ошибка регулирования.
Астатическая система первого порядка имеет один интегратор в прямой цепи регулирования. После завершения переходного процесса точность регулирования обеспечивается благодаря свойствам интегратора как запоминающего устройства (память идеального интегратора бесконечна).
Введение в автоматическую систему двух интегрирующих звеньев позволяет получить управление по ускорению. Система с астатизмом второго порядка благодаря свойством интеграторов точно воспроизводит и установившемся процессе постоянные и линейно возрастающие воздействия. Воздействие, изменяющееся с постоянным ускорением, автоматическая система воспроизводит (копирует) с постоянной динамической ошибкой, называемой ошибкой по ускорению.
Таким образом, порядок астатизма по отношению к задающему воздействию легко определить непосредственно по функциональной схеме автоматической системы. Для этого автоматическую систему путем структурных преобразований следует привести к одноконтурной и определить количество интегрирующих звеньев между входом и выходом.

Пропорционально-интегрально-дифференциальный закон. Положительные качества всех рассмотренных автоматических систем объединяет пропорционально-интегрально-дифференциальный закон регулирования или ПИД-регуляторы. Мысль инженеров работала над тем, как устранить отмеченные выше недостатки, или если их полностью устранить нельзя, то хотя бы уменьшить их вредное влияние на процесс регулирования. Было решено использовать воздействия по производной сигнала рассогласования.
ПИД-регулятор сочетает в себе достоинства всех простейших законов автоматического регулирования:
— высокое быстродействие благодаря наличию пропорциональной составляющей;
— высокую точность благодаря интегральной составляющей;
— малое время переходного процесса благодаря дифференциальной составляющей.
Иногда говорят, что такие регуляторы работают с предварением, т. е. он вступает в действие тогда, когда еще отклонение не произошло.
Благодаря воздействию по производной осуществляется предварение формирования управляющего воздействия, а благодаря сигналу по интегралу снимается статическая погрешность регулирования.
В этом случае управляющее воздействие формируется согласно закону

На установившихся режимах работы всегда, как бы ни изменялись возмущения, регулируемая величина остается неизменной. Этот регулятор в начале переходного процесса, вызванном изменением нагрузки, работает как ПИ-регулятор, что является благоприятным для динамических свойств системы, а затем в ходе переходного процесса, действие обратной связи ослабевает, что позволяет работать без статической погрешности. Такая обратная связь называется гибкой обратной связью.
Принцип работы пропорционально-интегрально-дифференциального регулятора
Необходимо отметить, что применение автоматических регуляторов с дифференциальными составляющими, несмотря на их достоинства, не всегда целесообразно, а иногда и недопустимо. Так, для объектов с большим запаздыванием по каналу регулирования бесполезно вводить воздействие по производной от регулируемой величины, так как этот сигнал будет поступать в автоматический регулятор по истечении времени запаздывания после прихода возмущения, за которые в объекте регулирования могут накопиться большие отклонения. В таких случаях ПИД-регулятор может привести к неустойчивости автоматической системы
Использование нелинейных законов автоматического регулирования, определяемых разнообразными нелинейными уравнениями состояния значительно расширяет возможности целесообразного изменения качества процессов автоматического регулирования и точности работы автоматических систем. Это должно быть ясно из общих принципиальных соображений, так как область нелинейных уравнений значительно богаче и разнообразнее, чем линейных.
Несмотря на то, что общей теории нелинейных законов автоматического регулирования нет, исследования и опыт применения отдельных частных видов этих законов говорят об их большой практической эффективности.
Важным отличием нелинейных законов автоматического регулирования от линейных является то, что они придают автоматической системе принципиально новые свойства. Если при линейном законе автоматического регулирования всегда вырабатывается сигнал, пропорциональный входной переменной или ее производной, то при нелинейном законе может существенно изменяться сам характер действия автоматической системы на объект регулирования в зависимости от величины входного воздействия. Другими словами, если для линейных автоматических систем изменение размера отклонения Dx(t) — это изменение только масштаба, но не формы процессов, то в нелинейной автоматической системе при этом может существенно изменяться и форма процессов, вплоть до принципиальных качественных изменений картины происходящих процессов. Эти особые свойства нелинейных законов можно выгодно использовать в технике автоматического регулирования.
Нелинейные законы автоматического регулирования разделяют на:
— функциональные нелинейные законы автоматического регулирования;
— логические нелинейные законы автоматического регулирования;
— оптимизирующие нелинейные законы автоматического регулирования;
— параметрические нелинейные законы автоматического регулирования.
Рассмотрим отдельно каждый из указанных нелинейных законов автоматического регулирования.
Функциональные нелинейные законы автоматического регулирования предполагают изменение управляющего воздействия h(t) на объект регулирования, выражающегося в виде нелинейной функции от отклонения регулируемой величины Dx(t). Данный класс автоматических систем может содержать в себе как статические, так и динамические нелинейности

Нелинейный закон автоматического регулирования может включать нелинейности от выходной величины у(t). Подобные динамические члены нелинейного закона автоматического регулирования различно влияют на демпфирующие свойства автоматической системы в переходных режимах в зависимости от скорости отклонения регулируемой величины Dx(t). Они могут существенно улучшить динамическую точность автоматической системы в различных режимах вынужденного движения, воспроизведения различных форм задаваемых входных сигналов. а также при случайных воздействиях.
Отметим также, что функциональные нелинейные законы автоматического регулирования могут быть связаны не только с изменением параметров в зависимости от размеров входных воздействий, но и с изменением структуры автоматической системы.

Логические нелинейные законы автоматического регулирования реализуются с помощью не функциональных, а более сложных логических устройств. Построение простейшего логического нелинейного закона автоматического регулирования может сводиться к выбору того или иного способа обработки сигнала рассогласования Dx(t) в зависимости от поставленных перед автоматической системой задач и требуемого качества регулирования.
Логические нелинейные законы автоматического регулирования могут быть связаны также с изменением структуры автоматической системы. Например, при помощи логического устройства можно включать и выключать сигналы управления по первой и второй производными или интегралу, в зависимости от сочетания значений отклонения сигнала рассогласования Dx(t).
В общем случае срабатывание переключающего устройства в автоматической системе с переменной структурой может происходить от нескольких входных величин. При этом кроме основной нелинейности, возникающей за счет переключения структуры, дополнительно могут иметься какие-либо нелинейные свойства в отдельных других звеньях автоматического регулятора или объекта регулирования.
Оптимизирующие нелинейные законы автоматического регулирования основаны на использовании классических вариационных методов или на их основе принципа максимума, или методов динамического программирования таким образом, чтобы автоматическая система имела максимум быстродействия или минимум ошибки, или же экстремум другой величины с учетом ограничений, накладываемых в реальной автоматической системе на отдельные координаты.
Как правило, при этом приходят к нелинейным законам автоматического регулирования, хотя можно оптимизировать коэффициенты линейного закона. Часто оптимальный закон автоматического регулирования состоит в переключении управляющего воздействия h(t) с одного максимально возможного значения на другое. Моменты переключения определяются сложными комбинациями значений нескольких переменных и их производных.
Параметрические нелинейные законы автоматического регулирования формируют управляющее воздействие в виде нелинейной функции текущих координат, в которых задается параметрическая программа.
http://habr.com/ru/post/506984/
http://pandia.ru/text/78/172/74444.php