Отчет по работе №1.04 «Изучение законов механики на маятнике обербека»

Псковский политехнический институт
Филиал Санкт — Петербургского государственного университета.
Отчет по работе №1.04
«Изучение законов механики
на маятнике обербека».
Цель работы: Изучить законы механики вращательного движения тел.
Механическое движение — это изменение взаимного расположения тел (или частей одного тела), происходящее в пространстве с течением времени.
Движение тел характеризуется траекторией, перемещением, путём, скоростью и ускорением.
Траектория — геометрическое место точек пространства через которое проходит в своём движении тело. В зависимости от траектории движения делятся на прямолинейные и криволинейные.
Положение тела в пространстве характеризует радиус-вектор,(рис.1). Перемещение — вектор, проведённый из начальной в конечную точку
участка траектории и определяющий изменение радиуса — вектора

Путь — длина отрезка траектории отсчитанного вдоль неё
Скорость — векторная физическая величина, характеризующая быстроту перемещения тел (материальной точки)

Ускорение — векторная физическая величина, характеризующая быстро ту изменения скорости

Кинематика — раздел механики, изучающий законы механического движения без анализа причин, его вызывающих. Закон движения материальной точки

динамика — раздел механики, изучающий механическое движение с выяснением причины вызывающей это движение. В основе динамики лежат за коны Ньютона, которые утверждают, что причиной изменения скорости тел является взаимодействие тел.
Сила — векторная физическая величина, являющаяся мерой механического взаимодействия тел.
Инертность — свойство тел сохранять свое механическое состояние. Мерой инертности в поступательном движении является масса, во вращательном — момент инерции.
Второй закон Ньютона утверждает, что ускорение тела пропорционально равнодействующей силе и обратно пропорционально массе этого тела

Мерами движения тел служат: импульс и кинетическая энергия. Соответственно, мерами действия силы во времени является импульс силы, а в пространстве — работа.
Механическая работа равна скалярному произведению силы на перемещение

Основные теоремы динамики:
Изменение импульса тела равно импульсу всех приложенных к телу внеш них сил



Если силы обладают таким свойством, что работа их сил не зависит от формы траектории, то силы называются потенциальными. Примером потенциальной силы является сила тяжести, а силы непотенциальной — сила трения.
В курсе механики доказывается, что работа потенциальных сил равна убыли потенциальной энергии

Потенциальной энергией называется энергия которой обладают тела при их взаимодействии, например тело, поднятое над Землей на высоту h, обладает потенциальной энергией взаимодействия равной

Полная механическая энергия равна сумме кинетической и потенциальной энергий 
Теорема об изменении полной механической энергии утверждает, что изменение этой энергии равно работе непотенциальных сил

Вращательное движение как частный случай криволинейного движения возникает тогда, когда вектор силы действующей на тело перпендикулярен вектору скорости. Траекторией движения тела является окружность.. Кинематическими характеристиками движения являются: угол поворота радиус-вектора, угловая скорость и угловое ускорение. Направление вектора W определяется правилом правого винта (рис.2).

Основное уравнение кинематики вращательного движения

Основное уравнение динамики вращательного движения твёрдого тела относительно неподвижной оси имеет вид

Это уравнение аналогично уравнению Ньютона для движения материальной точки (4): роль силы играет момент силы, роль массы — момент инерции, а роль ускорения — угловое ускорение.
С помощью маятника Обербека (рис. 3) можно экспериментально проверить уравнение (11) что является одновременно и проверкой основных положений механики по вращению твёрдого тела.
В маятнике Обербека вращающий момент М создаётся силой натяже ния нити Т

где 1 — радиус шкива (Р = Р. или Р.
Величину силу Т легко найти из уравнения движения платформы с перегруз ком

Ускорение а можно найти, если измерить время, в течение которого нагруженная платформа из состояния покоя опускается на расстояние h.


Момент инерции всей системы можно вычислить по формуле


Таким образом, используя уравнения (12, 13, 14, 15, 16) и проведя соответствующие измерения, можно проверить закон вращательного движения (11).
На практике значительное влияние может оказать момент сил трения, приложенный к осям маятника. Неучёт его может сильно исказить результаты опыта. Преобразуем уравнение (11) выделив момент сил трения в явном виде

Экспериментальная работа делится на три части:
в первой — исследуется вращательное движение маятника под действием раз личных перегрузков при постоянном моменте инерции системы. Из данных этого опыта определяют момент инерции системы 1 и момент сил трения. Во второй части — изучается вращение маятника при различных значениях момента инерции грузов относительно оси вращения, те. при различных положениях грузов, на спинах маятника Обербека;
в третьей части проверяется преобразование механической энергии при вращательном движении.
Энергия маятника Обербека складывается из собственно энергии маятника и энергии платформы. В начальный момент времени кинетическая энергия маятника и платформы равна нулю. Потенциальная энергия платформы:

После того как платформа опустилась с высоты h, кинетическая энергия маятника станет равной

Тогда согласно теореме об изменении полной механической энергии (9)

где А, — работа сил трения в системе.
Работа силы тяжести равна изменению потенциальной энергии

На рис.1 показан маятник Обербека — прибор для исследования законов вращательного движения. Каждый груз, имеет свой момент инерции относительно своего центра масс: 
Лабораторные работы по физике
ИЗУЧЕНИЕ ЗАКОНОВ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ НА МАЯТНИКЕ ОБЕРБЕКА
Цель работы: 1) изучение кинематических и динамических характеристик вращательного движения;
2) экспериментальное определение момента инерции крестовины маятника Обербека и момента сил трения;
3) проверка справедливости закона сохранения (превращения) энергии механической системы.
Схема экспериментальной установки
1 – ось вращения;
Основным элементом маятника Обербека (рис. 1) является крестовина, способная свободно вращаться вокруг неподвижной горизонтальной оси 1. Крестовина состоит из четырех стержней 2 с грузами-насадками 3, расположенными симметрично относительно оси вращения. С крестовиной жестко скреплен шкив 4 радиусом R. На шкив намотана нить 5, перекинутая через легкий блок 6. К свободному концу нити привязан груз 7, массу которого m можно изменять в процессе опытов. Для измерения высоты h расположения груза над полом служит линейка 8, а для измерения времени его падения – секундомер 9.
Если поднятый на высоту h груз отпустить, то он начнет падать с ускорением , которое определяется вторым законом Ньютона. На груз действуют две силы: сила тяжести и сила натяжения нити (сопротивлением воздуха в данном случае можно пренебречь). Уравнение основного закона динамики:
в проекциях на направление движения груза имеет вид:
Пренебрегая массами нити 5 и блока 6, можно считать, что нить действует на поверхность шкива касательной силой , равной по модулю силе : | | = | | = Fн . Касательная сила создает вращающий момент , по модулю равный произведению модуля силы на ее плечо, т.е. на радиус шкива R: Мн = Fн R. С учетом (1) вращающий момент силы натяжения нити равен
Под действием момента крестовина начинает вращаться с угловым ускорением . При этом на оси вращения возникают, хотя и незначительные, силы трения. Эти силы создают тормозящий момент , направленный противоположно угловому ускорению. С учетом направления моментов сил натяжения и трения алгебраическая запись уравнения основного закона динамики вращательного движения имеет вид
J e = Мн – Мтр , (3)
где J – момент инерции крестовины маятника Обербека относительно оси вращения.
Известно, что момент инерции зависит только от распределения массы тела относительно оси. Для крестовины маятника величина J определяется в основном положением грузов-насадок 3 на стержнях 2. Если их положение в ходе опытов не изменяется, то и момент инерции остается постоянным. Момент сил трения также можно считать практически неизменным. Поэтому зависимость углового ускорения e от момента силы натяжения Мн , согласно уравнению (3), имеет линейный характер. Определив опытным путем значения e при различных Мн и обработав соответствующим образом полученную экспериментальную зависимость e (Мн), с помощью этого уравнения можно найти неизвестные величины J и Мтр . Рассмотрим теперь методику измерения углового ускорения e и момента силы натяжения Мн .
Так как нить 5 практически нерастяжима, все ее точки, включая точки на поверхности шкива, движутся с одинаковым ускорением , равным по модулю ускорению падающего груза : | | = | | = a. Груз падает с высоты h равноускоренно; при этом за время t он проходит путь
Измерив высоту h и время падения груза t, можем найти ускорение
Если известны масса груза т и радиус шкива R, то по формуле (2) можно рассчитать момент силы натяжения нити Мн .
Угловое ускорение вращения шкива, а следовательно, и крестовины и тангенциальное (касательное) ускорение точек на поверхности шкива связаны известным соотношением
Таким образом, зная массу груза т, радиус шкива R и высоту h, с которой падает груз, а также измерив время его падения t, можно экспериментально определить величины e и Мн .
Рассмотрим теперь превращение энергии в вышеописанном опыте. Поднятый на высоту h груз обладает потенциальной энергией
кинетическая энергия системы «груз + крестовина» при этом равна нулю. В момент падения груза на пол его потенциальная энергия обращается в ноль, но за счет ее уменьшения груз приобретает кинетическую энергию
а крестовина – кинетическую энергию вращения
где v – скорость груза в момент падения; w – угловая скорость вращения крестовины к этому моменту.
Итак, начальное значение полной механической энергии рассматриваемой системы равно W0 = Wp , а конечное W = Wk1 + Wk2 . Изменение энергии:
Как известно, изменение полной механической энергии консервативной системы равно нулю, а при наличии неконсервативных сил – их работе. В данной системе действуют неконсервативные силы трения, работа которых равна
где j – угол поворота крестовины за время падения груза. Знак « – » отражает тот факт, что работа сил трения и сопротивления всегда отрицательна (угол между направлениями силы и перемещения равен 180 ° ). Итак, закон сохранения (превращения) энергии в данном случае можно записать как
С учетом соотношений (6)-(9) уравнение (10) примет вид:
Для экспериментальной проверки справедливости уравнения (11) необходимо знать все входящие в него величины. К ним относятся, во-первых, заранее известные ускорение свободного падения g, масса груза т и высота h; во-вторых, определяемые путем обработки экспериментальной зависимости момент инерции крестовины J и момент сил трения Мтр ; в-третьих, кинематические характеристики системы v, w и j . Остановимся на определении последних.
Скорость груза в момент его падения на пол найдем исходя из закономерностей равноускоренного движения:
Такую же по величине скорость имеют и точки на поверхности шкива. Используя связь между линейной и угловой скоростями, получим
Так как линейное расстояние, пройденное точками на поверхности шкива, равно перемещению груза за тот же промежуток времени, угол j (в радианах) может быть рассчитан как
Порядок измерений и обработки результатов
1. Запишите радиус шкива R , выразив его в метрах, в тетрадь (R=17мм).
2. Занесите во второй столбец таблицы 1 значение массы груза т (в кг).
3. Вращая крестовину, намотайте нить на шкив так, чтобы нижняя поверхность груза 7 оказалась на заданной высоте h над полом, запишите значение высоты в тетрадь (значение h задает преподаватель или спишите с экрана монитора).
4. Отпустив крестовину, одновременно включите секундомер, а в момент касания грузом пола – выключите. Запишите время падения в третий столбец таблицы 1.
5. Повторите пп. 3 и 4 с тем же грузом еще два раза. Рассчитайте и занесите в таблицу среднее из трех значений времени t.
6. Увеличивая массу груза согласно рекомендациям, выполните пп. 2-5 еще пять раз.
7. Для каждого из шести проделанных опытов рассчитайте ускорение а по формуле (4), подставляя в нее среднее из трех измеренных значений времени падения t. Величину а (с точностью не менее чем до трех значащих цифр) запишите в четвертый столбец таблицы 1.
8. По формулам (2) и (5) вычислите значения момента силы натяжения нити Мн и углового ускорения e . Результаты занесите в соответствующие столбцы табл. 1.
9. Руководствуясь правилами [1], постройте график зависимости углового ускорения от момента силы натяжения (в данной работе необходимо, чтобы начало координат совпадало с нулевыми значениями откладываемых величин e и Мн). Нанесите на график экспериментально полученные точки.
10. Одним из описанных ниже способов* обработайте линейную экспериментальную зависимость e (Мн) и найдите значения момента инерции крестовины J и момента сил трения Мтр. Запишите эти значения в тетрадь.
11. Для одного из проделанных опытов рассчитайте по формулам (12)-(14) скорость груза v, угловую скорость вращения w и угол поворота j крестовины маятника Обербека в момент падения груза на пол.
12. Вычислите значения левой и правой частей уравнения закона сохранения энергии (11). Сравнив эти значения между собой, сделайте выводы.
Обработка зависимости e (Мн)
Угловое ускорение крестовины e и момент силы натяжения нити Мн связаны уравнением основного закона динамики вращательного движения (3). Зависимость e (Мн) можно представить в виде
где . Таким образом, определив коэффициенты линейной зависимости (15) K и b, легко найти момент инерции J и момент сил трения Мтр :
Обработку экспериментальной зависимости e (Мн) можно провести либо графически, либо методом наименьших квадратов.
Графический способ. По экспериментальным точкам проведите сглаживающую прямую. Из уравнения (3) следует, что угловое ускорение e обращается в нуль при Мн = Мтр . Таким образом, момент сил трения Мтр определяется (с учетом масштаба!) отрезком, отсекаемым проведенной прямой на оси абсцисс (рис. 2).
Величина K в уравнении (15) представляет собой угловой коэффициент прямой, т.е. тангенс угла ее наклона к оси абсцисс. Согласно (16), момент инерции J есть величина, обратная K, – значит, его можно найти как котангенс этого угла. Выбрав на сглаживающей прямой две достаточно удаленные друг от друга точки, рассчитайте значение J как отношение отрезков
причем величины отрезков D Мн и D e должны быть взяты с учетом масштаба графика и выражены в соответствующих единицах измерения: D Мн – в Н × м, а D e – в рад/с2 или в с – 2. Только в этом случае результат будет правильным, и момент инерции будет иметь размерность кг × м2.
Метод наименьших квадратов. (Подробно этот метод рассмотрен в [1]). Изучив данный материал, заполните два последних столбца табл. 1. Найдите суммы значений величин в последних четырех столбцах и занесите их в строку « S = ». Вычислите коэффициенты K и b зависимости (15); результаты расчетов запишите в тетрадь. Для определения момента инерции крестовины J и момента сил трения Мтр воспользуйтесь соотношениями (16). На графике зависимости e (Мн) проведите прямую по двум точкам, координаты которых рассчитайте по найденным значениям коэффициентов. Убедитесь в правильности проведенных расчетов (прямая должна «наилучшим» образом пройти через экспериментальные точки).
Какие величины характеризуют вращательное движение?
Что характеризует момент инерции твердого тела относительно оси вращения? Как он рассчитывается?
Сформулируйте и докажите теорему Штейнера.
Как изменится кинетика опускания гири, если грузы на крестовине передвинуть ближе (дальше) к оси вращения.
Дайте определение момента силы. Какие моменты сил действуют на крестовину маятника Обербека в этой работе.
Запишите математически и сформулируйте главный закон динамики вращательного движения.
Покажите, что в пренебрежении трением, расчетная формула для момента инерции маятника Обербека будет иметь вид:
.
Запишите и поясните закон сохранения (превращения) механической энергии в этой работе.
Изучение динамики вращательного движения
Страницы работы





Фрагмент текста работы
Белорусский государственный университет
Лабораторная работа №3
«Изучение динамики вращательного движения»
Выполнили: студентки I курса 7 группы
Кулинкина Анна Николаевна
Рогова Оксана Анатольевна
Цель работы: экспериментально проверить основной закон динамики вращательного движения, определить момент инерции маятника Обербека с предельной относительной погрешностью e, не превышающей 5 %.
Оборудование и принадлежности: установка для проведения измерений, штангенциркуль.
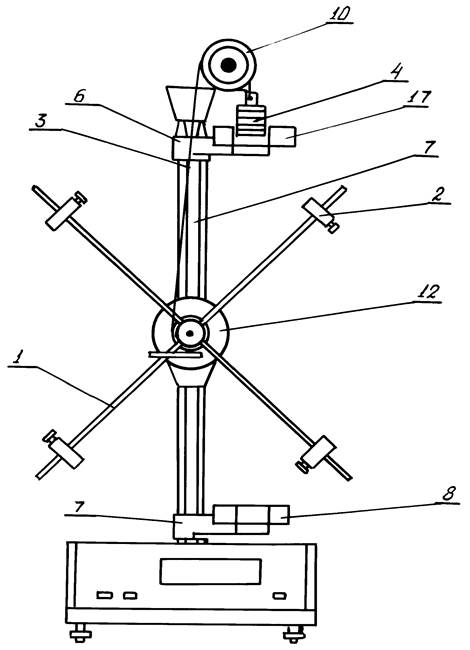
Для изучения вращательного движения используется маятник Обербека рис. 1. Он состоит из четырех взаимно перпендикулярных стержней 1, укрепленных на втулке. Втулка и два шкива различных радиусов насажены на общую ось. Ось закреплена в подшипниках, так что вся система может свободно вращаться вокруг горизонтальной оси. На стержни надеваются цилиндры 2 массой mц, которые могут перемещаться и закрепляться посредством винтов на любом расстоянии от оси вращения. Момент инерции маятника можно изменять, передвигая грузы вдоль стержней. На один из шкивов маятника навита тонкая нить 3, на конце которой находится груз 4 массы m. Момент силы создаваемый грузом служит для приведения маятника во вращательное движение. Груз удерживается в неподвижном состоянии с помощью фрикционной муфты, приводимой в действие электромагнитом 5. Подвижный кронштейн 6 можно перемещать вдоль колонки и фиксировать в любом положении, изменяя таким образом высоту падения груза. Для отсчета высоты на колонке нанесена шкала 7. На подвижном кронштейне 6 установлен фотоэлектрический датчик, импульсы которого служат для запуска миллисекундомера. На нижнем неподвижном кронштейне 7 закреплен фотоэлектрический датчик 8, вырабатывающий электроимпульс конца измерения времени, включающий тормозной электромагнит.
Перед началом работы необходимо с помощью регулируемых ножек основания прибора установить колонку в вертикальное положение. Установить подвижный кронштейн на выбранную высоту, чтобы грузы, падая, проходили через середину рабочего окна фотоэлектрических датчиков. При этом нижний край грузов должен совпадать с чертой на корпусе верхнего фотоэлектрического датчика.
 (1)
(1)
где М-момент силы;
ε- угловое ускорении.
 (2)
(2)
где а— ускорение груза;
h-высота, с которой падает груз;
 (3)
(3)
где — угловое ускорение;
— угловое ускорение;
а— ускорение груза;
h-высота, с которой падает груз;
 (4)
(4)
где М-момент силы;
m— масса цилиндра с грузом;
g— ускорение свободного падения;
h— высота, с которой падает цилиндр;
 (5)
(5)
где М-момент силы;
— угловое ускорение;
m— масса цилиндра с грузом;
g— ускорение свободного падения;
h— высота, с которой падает цилиндр;
 (6)
(6)
где Jц — момент инерции полых цилиндров относительно произвольной оси;
d-расстояние от оси вращения до центра масс цилиндра;
l— длина цилиндра;
d = L +  /2 + r(7)
/2 + r(7)
где d –расстояние от оси вращения до центра масс цилиндров по формуле;
L— расстояние от поверхности вала до цилиндров;
l— длина цилиндра;
r— радиус вала маятника.
 (8)
(8)
где Jцэ –момент инерции цилиндров
m— масса цилиндра с грузом;
g— ускорение свободного падения;
h— высота, с которой падает цилиндр;
J0 –момент инерции маятника без цилиндров.
Формулы для расчета погрешностей:
(9) 
где εполн. – полная относительная погрешность косвенных измерений;
εмин. – минимальная относительная погрешность косвенных измерений;
εслуч. –относительная погрешность косвенных измерений.
(10) 
где εмин. – минимальная относительная погрешность косвенных измерений;
Dy – абсолютная погрешность косвенных измерений;
y1 –результаты первого наблюдения.
(11) 
где Dy – абсолютная погрешность косвенных измерений;
 – абсолютная погрешность прямых измерений;
– абсолютная погрешность прямых измерений;
y1 – результаты первого наблюдения.
(12) 
где – абсолютная погрешность прямых измерений;
(13) 
где Dxприб. – приборная погрешность;
δ – предельная приборная погрешность.
(14) 
где Dxокруг. – погрешность округлений;
p = 0,95 – доверительная вероятность;
h – интервал округления.
(15) 
где εслуч. – относительная погрешность косвенных измерений, с учётом случайной погрешности прямых мзмерений;
Dy – абсолютная погрешность косвенных измерений;
– среднее значение результатов наблюдения.
(17) 
где Dy – абсолютная погрешность косвенных измерений;
Dxi – абсолютная погрешность прямых измерений;
– среднее значение результатов наблюдения.
(18) 
где Dxi – абсолютная погрешность прямых измерений;
(19) 
где Dxслуч. – случайная погрешность прямых измерений;
n – количечтво экспериментов;
Dxi – отклонение данного результата от среднего ( ).
).
После подстановки соответствующих значений x и y получили следующие формулы для определения относительной погрешности косвенных измерений величин:
(20) 
(21) 
Предварительная оценка погрешностей.












Таблица с данными, полученными в ходе эксперимента:
http://rtb-t.ru/experement/induktixno41.htm
http://vunivere.ru/work50390