Динамика вращательного движения (на установке маятник Обербека)

Лабораторная работа М-8
ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ (на установке Маятник ОБЕРБЕКА)
Экспериментальное исследование динамики вращательного движения твёрдого тела на установке «Маятник Обербека»; экспериментальное определение момента инерции и момента силы трения.
2. ПОДГОТОВКА К РАБОТЕ
Изучите теоретический материал по учебникам [1], [2]: понятия абсолютно твёрдого тела (АТТ), момента силы, момента инерции; теорему Штейнера; закон вращательного движения АТТ. Ознакомьтесь с устройством лабораторного стенда, с методом косвенного измерения момента инерции и момента силы трения. Подготовьте ответы на вопросы для допуска.
3. КРАТКАЯ ТЕОРИЯ
Абсолютно твердое тело (АТТ) – это тело, деформациями которого можно пренебречь в условиях данной задачи.
 Момент силы
Момент силы  — величина, характеризующая внешнее воздействие на тело и определяющая изменение его вращательного движения. Относительно неподвижной точки О (рис.1) момент силы равен векторному произведению:
— величина, характеризующая внешнее воздействие на тело и определяющая изменение его вращательного движения. Относительно неподвижной точки О (рис.1) момент силы равен векторному произведению:

 , (1)
, (1)
где  радиус-вектор, проведённый из точки вращения О в точку приложения силы,
радиус-вектор, проведённый из точки вращения О в точку приложения силы,  — угол между векторами
— угол между векторами  и
и  .
.
Момент силы относительно оси вращения z  (рис.1) – это проекция вектора
(рис.1) – это проекция вектора  на эту ось.
на эту ось.
Инерционность (инертные свойства) АТТ по отношению к вращающему воздействию момента характеризуется моментом инерции  относительно оси вращения z . Величина равна сумме:
относительно оси вращения z . Величина равна сумме:
 , (2)
, (2)
где mi — элементарные массы, на которые можно условно разбить АТТ,  — их кратчайшие расстояния от оси z.
— их кратчайшие расстояния от оси z.
В случае тонкого стержня длиной  и массой
и массой  , вращающегося вокруг оси, проходящей через его центр масс, перпендикулярно стержню:
, вращающегося вокруг оси, проходящей через его центр масс, перпендикулярно стержню:
 . (3)
. (3)
При переносе оси вращения на расстояние d параллельно оси, проходящей через центр масс, величина рассчитывается по теореме Штейнера:
 , (4)
, (4)
где m — полная масса АТТ.
Для АТТ с неподвижной осью вращения z выполняется уравнение динамики вращательного движения:
 , (5)
, (5)
где  — сумма моментов внешних сил относительно оси z, — момент инерции относительно этой же оси,
— сумма моментов внешних сил относительно оси z, — момент инерции относительно этой же оси,  — угловая скорость,
— угловая скорость,  — угловое ускорение.
— угловое ускорение.
4. ОПИСАНИЕ УСТАНОВКИ И МЕТОДИКА ПРОВЕДЕНИЯ ЭКСПЕРИМЕНТА
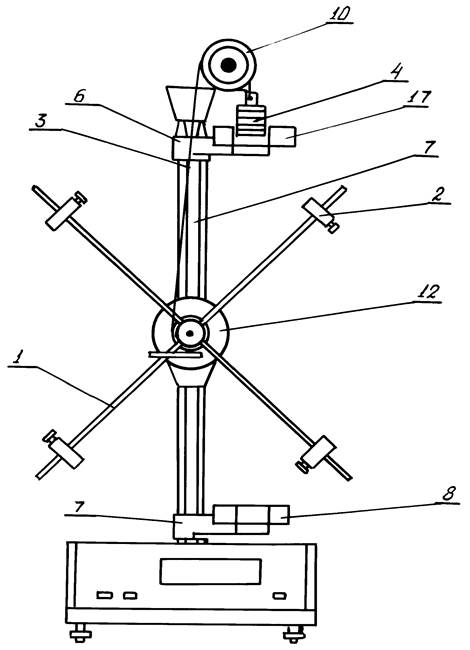
Устройство маховика Обербека (МО) показано на рис. 2. Вращающееся на горизонтальной оси тело выполнено в виде крестовины 1 с четырьмя стержнями, на которые надеты грузы 2. Положение грузов можно изменять. Такая конструкция позволяет регулировать величину момента инерции тела без изменения его полной массы. Крестовина с грузами приводится во вращение дополнительным грузом 3, массу которого можно изменять. Груз 3 закреплён на нити 4, наматываемой на шкив 5 и перекинутой через блок 6. Расстояние, проходимое по вертикали грузом 3, отсчитывается по шкале на вертикальной штанге 8. Для отсчёта верхней координаты груза 3 служит фиксатор 7. Время движения груза 3 измеряется электронным секундомером, снабжённым фотодатчиком 9. На оси вращения крестовины имеется электромагнитный тормоз, который автоматически останавливает движение МО в момент пересечения луча фотодатчика 9 грузом 3.


Покажем, каким образом на основе прямых измерений пути h и времени t движения груза 3 можно косвенно определить динамические параметры вращения МО.
Будем считать, что вращающиеся элементы МО представляют собой абсолютно твёрдые тела (закон (5) выполняется), действующие силы постоянны (движение равноускоренное), нить 4 — невесома и нерастяжима, а масса блока 6 – пренебрежимо мала.
В соответствии со схемой МО, представленной на рис. 3, уравнение вращательного движения крестовины имеет вид:
 , (6)
, (6)
 — (7)
— (7)
момент силы натяжения нити T0,  — момент силы трения, r – радиус шкива 5 (направления векторов
— момент силы трения, r – радиус шкива 5 (направления векторов  и
и  показаны на рис. 3). В силу невесомости нити и блока 6 (рис. 2) модули сил натяжения нитей равны между собой: Т0= Т’= Т.
показаны на рис. 3). В силу невесомости нити и блока 6 (рис. 2) модули сил натяжения нитей равны между собой: Т0= Т’= Т.



Для груза 3 массой m:
 (8)
(8)
 . (9)
. (9)
Из кинематических соображений ускорение груза 3 равно:
 . (10)
. (10)
Поскольку нить нерастяжима, ускорения a и β связаны соотношением:
 . (11)
. (11)
Принимая грузы 2 с массами  за материальные точки, полный момент инерции МО можно приближённо рассчитывать по формуле:
за материальные точки, полный момент инерции МО можно приближённо рассчитывать по формуле:
 , (12)
, (12)
где  -расстояние грузов 2 до оси
-расстояние грузов 2 до оси  ,
,  -момент инерции всех остальных вращающихся элементов МО.
-момент инерции всех остальных вращающихся элементов МО.
Сделаем выводы из полученных соотношений.
Из формулы (6) следует, что экспериментальный график  должен быть прямой линией типа
должен быть прямой линией типа с угловым коэффициентом:
с угловым коэффициентом:
 , (13)
, (13)
при этом отрезок, отсекаемый на оси ординат, равен

 . (14)
. (14)
График зависимости  в соответствии с формулой (12) будет также прямой линией
в соответствии с формулой (12) будет также прямой линией  ,
,
где  ;
;  . (15)
. (15)
5. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
5.1. Подготовка установки к работе (выполняет лаборант)
5.1.1. С помощью винтов на нижней платформе стенда отрегулировать вертикальное положение штанги 8. При этом груз 3 при опускании на нити должен проходить по центру отверстия фотодатчика 9, не задевая его стенок.
5.1.2. Включить секундомер в сеть 220 В. При этом кнопка на задней панели секундомера должна находиться в выключенном состоянии (шкала времени не освещена).
5.2. Измерение зависимости времени движения груза от его массы 
5.2.1. Перемещая фиксатор 7 по шкале 8 и грузы 2 по стержням крестовины, установить величины  и , указанные в первой и второй строках табл. 1 для вашей бригады. Величина
и , указанные в первой и второй строках табл. 1 для вашей бригады. Величина  , где
, где  — координата луча фотодатчика;
— координата луча фотодатчика;  — координата верхней кромки фиксатора; величина отсчитывается по сантиметровым делениям на стержнях, с добавлением расстояния 2 см от закрепляемого конца стержня до оси крестовины.
— координата верхней кромки фиксатора; величина отсчитывается по сантиметровым делениям на стержнях, с добавлением расстояния 2 см от закрепляемого конца стержня до оси крестовины.
5.2.2. С использованием наборных грузов произвести трёхкратные измерения времени  движения груза 3 в зависимости от величин его массы
движения груза 3 в зависимости от величин его массы  , указанных в табл. 1. Измерения проводятся в следующем порядке:
, указанных в табл. 1. Измерения проводятся в следующем порядке:
а) при выключенном секундомере вручную намотать нить на шкив 5 до совмещения нижней поверхности груза 3 с верхней кромкой фиксатора 7;
б) поддерживая крестовину, включить секундомер нажатием кнопки на его задней панели (при этом срабатывает электромагнитный тормоз на оси крестовины, и на шкале секундомера появляются нулевые показания);
в) кратковременным нажатием кнопки «Пуск» на передней панели секундомера привести МО в движение;
г) сразу после автоматической остановки движения МО записать показание со шкалы секундомера и выключить его кнопкой на его задней панели.
5.2.3. Полученные результаты записать в табл. 2.
5.3. Измерение зависимости времени движения груза от положения грузов на стержнях крестовины 
5.3.1. Не изменяя величины , установить массу груза 3, указанную в третьей строке табл. 1 для вашей бригады.
5.3.2. В порядке, описанном в пункте 5.2.2., произвести однократные измерения времени при различных расстояниях  грузов 2 от оси крестовины. Рекомендуемые величины указаны в табл. 3. Результаты записать в табл. 3.
грузов 2 от оси крестовины. Рекомендуемые величины указаны в табл. 3. Результаты записать в табл. 3.
6. ОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
И ОФОРМЛЕНИЕ ОТЧЁТА
6.1. Обработка результатов измерений пункта 5.2
6.1.1. По данным табл. 2 рассчитать средние значения  и занести результаты в табл. 2.
и занести результаты в табл. 2.
6.1.2. Подставляя величины в формулы (10) и (11), рассчитать и записать в табл. 2 значения ускорений  и
и  . Радиус шкива r записан на установке.
. Радиус шкива r записан на установке.
6.1.3. По формуле (7) с учетом (9) определить величины моментов  и записать их в табл. 2.
и записать их в табл. 2.
6.1.4. По данным табл. 2 построить график зависимости  . Обработайте зависимость по методу наименьших квадратов (МНК). Для этого надо открыть папку «Обработка результатов ЛР» на рабочем столе компьютера и файл «Расчёт
. Обработайте зависимость по методу наименьших квадратов (МНК). Для этого надо открыть папку «Обработка результатов ЛР» на рабочем столе компьютера и файл «Расчёт  МНК». Результаты расчёта опытных величин и (см. формулы (13) и (14)) и соответствующие погрешности записать в табл. 2.
МНК». Результаты расчёта опытных величин и (см. формулы (13) и (14)) и соответствующие погрешности записать в табл. 2.
6.2. Обработка результатов измерений пункта 5.3
6.2.1. С использованием формул (6)-(11) можно получить формулу для расчета момента инерции (проверьте вывод самостоятельно):
 (16)
(16)
По данным ti из табл. 3 по формуле (16) рассчитать значения  . Занести результаты в табл. 3.
. Занести результаты в табл. 3.
6.2.2. Обработайте полученную зависимость Iz(R2) по методу наименьших квадратов. Для этого необходимо открыть папку «Обработка результатов ЛР», расположенную на рабочем столе лабораторного компьютера, и открыть файл «Расчет y=Аx+В МНК. xls». Результаты расчёта опытных величин и (см. формулы (15)) с соответствующими погрешностями записать в табл.3.
6.2.3. Проведите сравнение значений , полученных в пунктах 6.1.4 и 6.2.2 при одинаковых значениях . Сравнить полученное значение с величиной, указанной на поверхностях грузов 2.
6.2.4. По известным значениям массы и длины стержней крестовины с помощью теоремы Штейнера рассчитайте их момент инерции. Оцените их вклад в величину , полученную в п. 6.2.2.
6.2.5. Сделайте выводы по полученным экспериментальным результатам.
7. ВОПРОСЫ ДЛЯ ДОПУСКА К ЛАБОРАТОРНОЙ РАБОТЕ
7.1. Дайте определения момента силы и момента инерции. Каким образом в установке можно регулировать и измерять эти величины?
7.2. Каким образом можно рассчитать момент инерции твёрдого тела при параллельном переносе оси вращения от центра масс на некоторое расстояние  ? Как рассчитать момент инерции четырёх стержней крестовины со снятыми грузами при их известных массах и длинах?
? Как рассчитать момент инерции четырёх стержней крестовины со снятыми грузами при их известных массах и длинах?
7.3. Сформулируйте закон динамики вращательного движения абсолютно твёрдого тела? При каких условиях тело будет вращаться равноускоренно? Каковы направления векторов моментов вращающих сил в установке? Как определить моменты этих сил относительно оси вращения?
7.4. Какие приближения использованы в формуле (12) для расчёта момента инерции? При каком предположении можно считать движение равноускоренным?
7.5. Каким образом можно изменять момент инерции крестовины? Какой вращающий момент создает сила натяжения нити?
7.6. Каким образом зависит время опускания груза 3 от начальной высоты , его массы , расстояний грузов на крестовине от её оси, от момента силы трения?
7.7. Каково соотношение между ускорениями  и ? Какие свойства нити 4 (рис. 2) необходимы для выполнения этого соотношения?
и ? Какие свойства нити 4 (рис. 2) необходимы для выполнения этого соотношения?
7.8. Как на основе формул (7) и (9) можно приближённо рассчитать момент силы натяжения нити, вращающей МО, если ускорение груза 3 будет намного меньше ускорения свободного падения?
Изучение динамики вращательного движения
Страницы работы





Фрагмент текста работы
Белорусский государственный университет
Лабораторная работа №3
«Изучение динамики вращательного движения»
Выполнили: студентки I курса 7 группы
Кулинкина Анна Николаевна
Рогова Оксана Анатольевна
Цель работы: экспериментально проверить основной закон динамики вращательного движения, определить момент инерции маятника Обербека с предельной относительной погрешностью e, не превышающей 5 %.
Оборудование и принадлежности: установка для проведения измерений, штангенциркуль.
Для изучения вращательного движения используется маятник Обербека рис. 1. Он состоит из четырех взаимно перпендикулярных стержней 1, укрепленных на втулке. Втулка и два шкива различных радиусов насажены на общую ось. Ось закреплена в подшипниках, так что вся система может свободно вращаться вокруг горизонтальной оси. На стержни надеваются цилиндры 2 массой mц, которые могут перемещаться и закрепляться посредством винтов на любом расстоянии от оси вращения. Момент инерции маятника можно изменять, передвигая грузы вдоль стержней. На один из шкивов маятника навита тонкая нить 3, на конце которой находится груз 4 массы m. Момент силы создаваемый грузом служит для приведения маятника во вращательное движение. Груз удерживается в неподвижном состоянии с помощью фрикционной муфты, приводимой в действие электромагнитом 5. Подвижный кронштейн 6 можно перемещать вдоль колонки и фиксировать в любом положении, изменяя таким образом высоту падения груза. Для отсчета высоты на колонке нанесена шкала 7. На подвижном кронштейне 6 установлен фотоэлектрический датчик, импульсы которого служат для запуска миллисекундомера. На нижнем неподвижном кронштейне 7 закреплен фотоэлектрический датчик 8, вырабатывающий электроимпульс конца измерения времени, включающий тормозной электромагнит.
Перед началом работы необходимо с помощью регулируемых ножек основания прибора установить колонку в вертикальное положение. Установить подвижный кронштейн на выбранную высоту, чтобы грузы, падая, проходили через середину рабочего окна фотоэлектрических датчиков. При этом нижний край грузов должен совпадать с чертой на корпусе верхнего фотоэлектрического датчика.
 (1)
(1)
где М-момент силы;
ε- угловое ускорении.
 (2)
(2)
где а— ускорение груза;
h-высота, с которой падает груз;
 (3)
(3)
где — угловое ускорение;
— угловое ускорение;
а— ускорение груза;
h-высота, с которой падает груз;
 (4)
(4)
где М-момент силы;
m— масса цилиндра с грузом;
g— ускорение свободного падения;
h— высота, с которой падает цилиндр;
 (5)
(5)
где М-момент силы;
— угловое ускорение;
m— масса цилиндра с грузом;
g— ускорение свободного падения;
h— высота, с которой падает цилиндр;
 (6)
(6)
где Jц — момент инерции полых цилиндров относительно произвольной оси;
d-расстояние от оси вращения до центра масс цилиндра;
l— длина цилиндра;
d = L +  /2 + r(7)
/2 + r(7)
где d –расстояние от оси вращения до центра масс цилиндров по формуле;
L— расстояние от поверхности вала до цилиндров;
l— длина цилиндра;
r— радиус вала маятника.
 (8)
(8)
где Jцэ –момент инерции цилиндров
m— масса цилиндра с грузом;
g— ускорение свободного падения;
h— высота, с которой падает цилиндр;
J0 –момент инерции маятника без цилиндров.
Формулы для расчета погрешностей:
(9) 
где εполн. – полная относительная погрешность косвенных измерений;
εмин. – минимальная относительная погрешность косвенных измерений;
εслуч. –относительная погрешность косвенных измерений.
(10) 
где εмин. – минимальная относительная погрешность косвенных измерений;
Dy – абсолютная погрешность косвенных измерений;
y1 –результаты первого наблюдения.
(11) 
где Dy – абсолютная погрешность косвенных измерений;
 – абсолютная погрешность прямых измерений;
– абсолютная погрешность прямых измерений;
y1 – результаты первого наблюдения.
(12) 
где – абсолютная погрешность прямых измерений;
(13) 
где Dxприб. – приборная погрешность;
δ – предельная приборная погрешность.
(14) 
где Dxокруг. – погрешность округлений;
p = 0,95 – доверительная вероятность;
h – интервал округления.
(15) 
где εслуч. – относительная погрешность косвенных измерений, с учётом случайной погрешности прямых мзмерений;
Dy – абсолютная погрешность косвенных измерений;
– среднее значение результатов наблюдения.
(17) 
где Dy – абсолютная погрешность косвенных измерений;
Dxi – абсолютная погрешность прямых измерений;
– среднее значение результатов наблюдения.
(18) 
где Dxi – абсолютная погрешность прямых измерений;
(19) 
где Dxслуч. – случайная погрешность прямых измерений;
n – количечтво экспериментов;
Dxi – отклонение данного результата от среднего ( ).
).
После подстановки соответствующих значений x и y получили следующие формулы для определения относительной погрешности косвенных измерений величин:
(20) 
(21) 
Предварительная оценка погрешностей.












Таблица с данными, полученными в ходе эксперимента:
Изучение основного закона динамики вращательного движения на маятнике Обербека
Экспериментальная проверка основного закона динамики вращательного движения твердого тела.
ПРИБОРЫ И ПРИНАДЛЕЖНОСТИ
Набор грузов с известными массами.
Метровая линейка или рулетка.
ВЫВОД РАСЧЕТНОЙ ФОРМУЛЫ
 Маятник Обербека представляет собой систему, состоящую из шкива и ступицы со спицами (рис. 1). Система может вращаться относительно неподвижной оси, проходящей через центр симметрии системы. На каждую из спиц насажены равные по массе грузы m, передвигая которые можно менять момент инерции системы. Грузы закрепляются на спицах винтами, масса которых входит в массу грузов. К шкиву крепится упругая нить, к свободному концу которой крепится груз массой m0. Натяжение нити создает момент силы, приводящий маятник во вращение.
Маятник Обербека представляет собой систему, состоящую из шкива и ступицы со спицами (рис. 1). Система может вращаться относительно неподвижной оси, проходящей через центр симметрии системы. На каждую из спиц насажены равные по массе грузы m, передвигая которые можно менять момент инерции системы. Грузы закрепляются на спицах винтами, масса которых входит в массу грузов. К шкиву крепится упругая нить, к свободному концу которой крепится груз массой m0. Натяжение нити создает момент силы, приводящий маятник во вращение.
Основной закон динамики вращательного движения твердого тела имеет вид:
 ,
,
где M – алгебраическая сумма моментов сил, действующих на тело, относительно оси вращения; I – момент инерции тела относительно оси вращения;  – угловое ускорение.
– угловое ускорение.
Для маятника Обербека основной закон динамики вращательного движения принимает вид:
 , (1)
, (1)
где Т – сила натяжения нити,  – момент силы трения системы, I0 – момент инерции маятника Обербека без грузов, n – число грузов массой m,
– момент силы трения системы, I0 – момент инерции маятника Обербека без грузов, n – число грузов массой m,  – расстояние от центра груза m до оси вращения (рис. 2), r – радиус шкива, равный для всех установок 5,9 см.
– расстояние от центра груза m до оси вращения (рис. 2), r – радиус шкива, равный для всех установок 5,9 см.
 Экспериментальная проверка основного закона динамики вращательного движения на маятнике Обербека заключается в независимом определении левой и правой части соотношения (1) и их сравнении.
Экспериментальная проверка основного закона динамики вращательного движения на маятнике Обербека заключается в независимом определении левой и правой части соотношения (1) и их сравнении.
Из второго закона Ньютона для груза m0 выразим силу натяжения нити
 , (2)
, (2)
где  – ускорение поступательного движения груза, g –ускорение свободного падения.
– ускорение поступательного движения груза, g –ускорение свободного падения.
Для экспериментального определения силы натяжения нити  необходимо знать массу груза
необходимо знать массу груза  и найти ускорение груза
и найти ускорение груза  .
.
Масса груза известна. При необходимости массу можно определить с помощью технических весов.
Ускорение груза можно определить из эксперимента. Замотаем нить, на конце которой закреплен груз , на шкив маятника. Предоставим возможность грузу из состояния покоя пройти расстояние h за время t. Ускорение груза

 Момент силы трения определим, оценив работу сил трения. Для этого предоставим грузу возможность опускаться с высоты
Момент силы трения определим, оценив работу сил трения. Для этого предоставим грузу возможность опускаться с высоты  , равной длине нити. Груз , опустившись до конца, затем поднимается на высоту
, равной длине нити. Груз , опустившись до конца, затем поднимается на высоту  (рис. 3). Убыль потенциальной энергии груза равна работе сил трения
(рис. 3). Убыль потенциальной энергии груза равна работе сил трения
 . (3)
. (3)
В экспериментальной установке силы трения действуют внутри системы, и момент силы трения  можно считать постоянным. Работу сил трения можно вычислить по закону
можно считать постоянным. Работу сил трения можно вычислить по закону
 , (4)
, (4)
 , (5)
, (5)
где  – угол поворота маятника,
– угол поворота маятника,  – число оборотов.
– число оборотов.
Из (3), (4) с учетом соотношения (5), получим
 , (6)
, (6)
 . (7)
. (7)
Зная длину нити и  , можно определить коэффициент
, можно определить коэффициент  , а затем момент силы трения .
, а затем момент силы трения .
В правую часть (1) входят неизвестные величины и . Длину можно измерить экспериментально. При отсутствии проскальзывания нити по шкиву тангенциальное ускорение точек на поверхности шкива совпадает с ускорением поступательного движения груза , а угловое ускорение равно
 . (8)
. (8)
Соотношение (1) с учетом (2), (6) и (8) принимает вид
 (9)
(9)
Это уравнение проверим экспериментально.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Запишите значение момента инерции I0, число спиц n, массу груза m, радиус шкива r в таблицу (см. образец, табл.1).
2. Измерьте длину нити h с помощью рулетки или метровой линейки.
3. Грузы на спицах маятника установите в крайние положения и измерьте длину – расстояние от центра грузов m до оси вращения.
4. Подберите груз m0 не менее 100 г.
5. Закрутите полностью нить на шкив маятника и отпустите груз без толчка, одновременно включив секундомер.
6. В крайнем нижнем положении груза m0 фиксируйте время падения и дайте возможность закрутиться нити. В максимальной точке подъема груза m0 остановите маятник и измерьте расстояние  h. Чтобы убедиться в правильности фиксации времени падения, опыт проведите 5 раз.
h. Чтобы убедиться в правильности фиксации времени падения, опыт проведите 5 раз.
7. Сдвиньте грузы m на спицах ближе к оси вращения и измерьте расстояние . Повторите опыт по измерению времени падения t и h для груза m0.
8. Подберите груз m0 меньше 100 г и проведите опыты как в предыдущих пунктах 5–7.
9. По результатам опытов вычислите ускорение груза, коэффициент , левую и правую части (9) для каждого из четырех проведенных опытов.
10. Результаты измерений и расчета занесите в таблицу (см. образец, табл.1).
11. Сравните результаты всех полученных четырех опытов. Установите, в каком опыте получается наименьшее расхождение между левой и правой частями (9). Попытайтесь проанализировать причины разных расхождений во всех опытах.
| h, м | , м | m0, кг | t, с |  , м , м | а, м/с 2 |  | Левая часть  (кг·м 2 /с 2 ) (кг·м 2 /с 2 ) | Правая часть  (кг·м 2 /с 2 ) (кг·м 2 /с 2 ) |
 | ||||||||
 | ||||||||
 | ||||||||
 | ||||||||
| n= | g=9,8 м/с 2 | m0=0,255 кг | r=0,059 м | I0= кг·м 2 |
1. Сформулируйте основную идею работы. Какие физические законы применяются для решения задач работы?
2. Выведите рабочую формулу для проверки основного закона динамики вращательного движения твердого тела.
3. Как при помощи маятника Обербека изменить момент инерции системы? момент внешней силы?
4. Запишите и сформулируйте основной закон динамики вращательного движения твердого тела относительно закрепленной оси. Сопоставьте его со вторым законом Ньютона, проведите аналогию.
5. Опишите экспериментальную установку. Из каких основных частей она состоит?
6. Как можно оценить момент сил трения, действующих в системе?
7. Что называется моментом инерции тела относительно оси и каков его физический смысл?
8. Запишите и сформулируйте теорему Штейнера.
9. Что называется моментом силы относительно оси? Как он направлен?
10. Какие предположения сделаны в данной работе относительно физических свойств нити? Обоснуйте их.
11. Какие величины используют для описания вращательного движения?
12. Чему равен момент импульса тела относительно оси?
13. Проведите аналогию между величинами и формулами для поступательного и вращательного движения твердого тела.
14. Могут ли единицы измерения различных физических величин иметь одинаковую размерность?
15. Как спортсмен, прыгая с трамплина в воду, управляет скоростью своего вращения?
БИБЛИОГРАФИЧЕСКИЙ СПИСОК ЛИТЕРАТУРЫ
1. Савельев, И. В. Курс физики. В 3-х т. Т. 1. Механика. Молекулярная физика./ И. В. Савельев.- М.: Наука, 1989.- 352 с.
2. Иродов, И. Е. Механика. Основные законы./ И. Е. Иродов.- М.: Лаборатория Базовых Знаний, 2001.- 256 с.
3. Волков, В. Н. Физика. В 3-х т. Т. 1. Механика. Молекулярная физика./ В. Н. Волков, Г. И. Рыбакова, М. Н. Шипко; Иван. гос. энерг. ун-т.- Иваново, 1993.- 230 с.
http://vunivere.ru/work50390
http://lektsii.org/9-16570.html