Digiratory
Лаборатория автоматизации и цифровой обработки сигналов
Устойчивость нелинейных систем
Анализ устойчивости систем является одним из важнейших этапов проектирования систем управления, однако при анализе нелинейных, строго говоря, нет метода отвечающего критериям необходимости и достаточности, а критерии являются, как правило только достаточным (для устойчивости). Исходя из этого, для некоторых систем невозможно однозначно говорить о неустойчивости.
В классической теории управления имеется два основных аналитических метода: первый и второй методы Ляпунова, а также достаточно большое количество модификаций второго метода, как не связанного с линеаризацией.
Рассмотрим применение классических методов Ляпунова.
Первый метод Ляпунова
Позволяет судить об устойчивости положения равновесия по линеаризованным уравнениям. Метод основан на утверждениях:
- если собственные значения линеаризованной системы имеют отрицательные действительные части (линеаризованная система асимптотически устойчива), то положение равновесия нелинейной системы устойчиво «в малом»;
- если среди собственных значений линеаризованной системы имеются «правые», то положение равновесия нелинейной системы неустойчиво;
- если имеются некратные собственные значения на мнимой оси, а остальные — «левые», то в этом критическом случае по линеаризованной модели нельзя судить об устойчивости положения равновесия нелинейной системы.
Таким образом для анализа системы по первому методу Ляпунова необходимо:
- Найти положение равновесия системы — движений в системе нет (т.е. скорости и ускорения равны нулю) \[ \frac <\mathrm
v_><\mathrm t>= <0>\] - Линеаризовать систему в окрестности точки равновесия
- Записать полученное линеаризованное дифференциальное уравнение в матричной форме (составить матрицу А)
- Составить характеристический полином линеаризованной системы: \[
- Найти корни характеристического полинома. По виду корней сделать заключение о характере процессов в системе.
Основными недостатками первого метода Ляпунова являются:
- Если имеется корень на мнимой оси, то невозможно сказать о поведении процессов в системе.
- Возможно говорить только об устойчивости «в малом», т.е. при больших отклонениях от положения равновесия система может быть неустойчивой.
Пример 1.
Исследуем систему описываемую дифференциальными уравнениями:
Шаг 1. Положение равновесия:
Для нахождения точек равновесия левые части уравнений приравниваются к 0, что эквивалентно тому, что переменные состояния являются константами, а все их производные равны 0.
Шаг 2. Линеаризация для малых отклонений
Для линеаризации малых отклонений в точке равновесия старшие степени переменных, входящих в уравнения принимаются равными нулю.
Шаг 3. Линеаризованное управление в матричной форме
Преобразуем полученную линейную систему уравнений в матричный вид.
Шаг 4. Характеристический полином
Шаг 5. Корни характеристического полинома
Приравниваем характеристический полином к 0 и находим корни уравнения.
Заключение об устойчивости системы
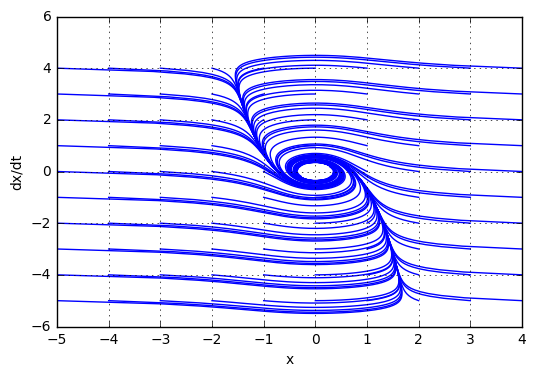
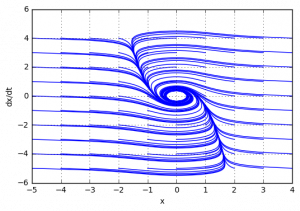
в данном примере при линеаризации система имеет два корня с отрицательной вещественной частью, т.е. мы можем сказать, что система устойчива «в малом» (при больших отклонениях система может быть неустойчива).
Подтвердим теоретический вывод компьютерным моделированием (построением фазового портрета)
При этом, при начальных условиях, находящиеся дальше от точки равновесия, система становится неустойчивой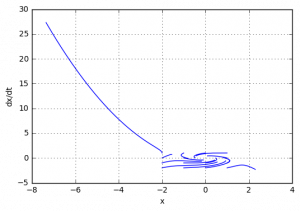
Пример 2. Нелинейный осциллятор
В качестве второго примера рассмотрим нелинейный осцилятор описываемый системой дифференциальных уравнений:
Аналогично первому примеру выполняем последовательность шагов
Шаг 1. Положение равновесия:
Шаг 2. Линеаризация для малых отклонений
Шаг 3. Линеаризованное управление в матричной форме
Шаг 4. Характеристический полином
Шаг 5. Корни характеристического полинома
Заключение об устойчивости системы
Рассматриваемая система является критическим случаем о ее устойчивости невозможно судить по линеаризованным уравнениям, применяемым в первом методе Ляпунова.
Второй метод Ляпунова
Второй метод Ляпунова не связан с линеаризацией системы, поэтому также называется прямым методом.
Для начала необходимо ввести понятия знакоопределенной, знакопостоянной и знакопеременной функций. Пусть имеется функция нескольких переменных:
Функция \(V \) называется знакоопределенной в некоторой области, если она во всех точках этой области вокруг начала координат сохраняет один и тот же знак и нигде не обращается в нуль, кроме только самого начала координат
\[ \left ( V\left ( \bar <0>\right )=0 \right ) \]
Функция \(V \) называется знакопостоянной, если она сохраняет один и тот же знак, но может обращаться в нуль не только в начале координат, но и в других точках данной области.
Функция \(V \) называется знакопеременной, если она в данной области вокруг начала координат может иметь разные знаки.
Теорема Ляпунова об устойчивости нелинейных систем
Если при заданных в форме
уравнениях системы n-го порядка можно подобрать такую знакоопределенную функцию Ляпунова
чтобы ее производная по времени
тоже была знакоопределенной (или знакопостоянной), но имела знак противоположный знаку \(V\), то данная система устойчива.
Для упрощения скажем, что функция Ляпунова должна быть положительной знакоопределенной функцией. Тогда условия теоремы Ляпунова будут выглядеть следующим образом:
Для устойчивости положения равновесия достаточно существования дифференцируемой функции
называемой функцией Ляпунова, удовлетворяющей в окрестности начала координат следующим условиям:
- \(V\left ( v_<1>, v_<2>,…, v_
\right ) \geq 0\) причем \(V=0\) лишь при следующем условии, означающем что функция \(V\) имеет строгий минимум в начале координат. \[ \bar = \begin v_ <1>\\ \vdots \\ v_ \end = \bar <0>\] - Производная функции по времени \[ \frac <\mathrm
V\left ( \bar \right )><\mathrm t>=\sum_ \frac<\partial V><\partial v_>\frac <\mathrm v_><\mathrm t>=\begin \frac<\partial V><\partial v_<1>> & \frac<\partial V><\partial v_<2>> & \cdots & \frac<\partial V><\partial v_>\end \begin \frac <\mathrm v_<1>><\mathrm t>\\ \frac <\mathrm v_<2>><\mathrm t>\\ \vdots \\ \frac <\mathrm v_ ><\mathrm t>\end \] в силу дифференциального уравнения \(\frac <\mathrm \bar ><\mathrm t>=\bar<\varphi >\left ( \bar \right ) \) является отрицательной знакопостоянной функцией, т.е. \[ \frac <\mathrm V\left ( \bar \right )><\mathrm t>=grad\bar \cdot \frac <\mathrm \bar ><\mathrm t>=grad\bar \cdot \bar<\varphi>\left ( \bar \right )\leq 0 \] при \(t\geq t_<0>\)
Таким образом, условия:
- \(\frac <\mathrm
V\left ( \bar \right )><\mathrm t>\leq 0\) и функция \(V\left ( v_<1>, v_<2>,…, v_ \right ) \) является положительной знакоопределенной — это является достаточным условием устойчивости - \(\frac <\mathrm
V\left ( \bar \right )><\mathrm t> \) — отрицательно определенная — это является достаточным условием асимптотической устойчивости. - \(\left \| v \right \|\rightarrow \infty : \frac <\mathrm
V\left ( \bar \right )><\mathrm t>\rightarrow \infty \) — достаточное условие устойчивости «в целом».
Для анализа системы по второму методу Ляпунова необходимо:
- Выбрать функцию Ляпунова от n переменных, где n- порядок системы.
- Найти частные производные по переменным.
- Вычислить производную функции по времени \(\frac <\mathrm
V\left ( \bar \right )><\mathrm t>\). Проанализировать полученный знак производной.
Из-за того, что второй метод Ляпунова не связан с линеаризацией, он считается универсальным. Однако он имеет ряд недостатков:
- Нет общих требований по выбору функции V
- Достаточный характер утверждения (если условия не выполняются, то об устойчивости ничего сказать нельзя, а можно посоветовать подобрать другую функцию \(V \))
Пример 3. Нелинейный осциллятор
Проанализируем систему из примера (2).
Шаг 1. Функция Ляпунова
Для начала необходимо выбрать функцию Ляпунова от 2-х переменных (т.к. два вектора состояния):
Шаг 2. Частные производные
Шаг 3. Производная функции
Подставим в выражение значения исходя из ДУ:
Заключение об устойчивости системы
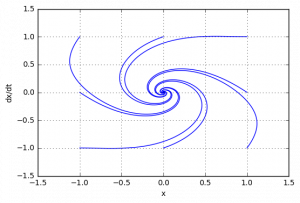
Исследовав систему первым методом Ляпунова мы не смогли сделать конкретный вывод об устойчивости системы, что позволил нам сделать второй метод Ляпунова. В результате мы можем сделать вывод, что система является асимптотически устойчивой.
Аналогично проверим с помощью моделирования:
Пример 4.
Рассмотрим систему, описываемую следующей системой дифференциальных уравнений:
Очевидно, что применение первого метода Ляпунова невозможно, т.к. матрица А состоит из нулей, а, следовательно, собственные значения равны нулю. Поэтому применим второй метод Ляпунова:
Шаг 1. Функция Ляпунова
Выбор функции Ляпунова второго порядка
Шаг 2. Частные производные
Шаг 3. Производная функции
При \(a=3\) имеет место асимптотическая устойчивость.
Заключение об устойчивости системы
Система является устойчивой.
Фазовый портрет системы выглядит следующим образом:
Уравнение для оценки устойчивости системы
8.1. Понятие устойчивости системы
Под устойчивостью системы понимается способность ее возвращаться к состоянию установившегося равновесия после снятия возмущения, нарушившего это равновесие. Неустойчивая система непрерывно удаляется от равновесного состояния или совершает вокруг него колебания с возрастающей амплитудой.

Устойчивость линейной системы определяется не характером возмущения, а структурой самой системы (рис.61). Говорят, что система устойчива «в малом» , если определен факт наличия устойчивости, но не определены ее границы. Система устойчива «в большом» , когда определены границы устойчивости и то, что реальные отклонения не выходят за эти границы.
В соответствии с классическим методом решение дифференциального уравнения ищется в виде:
y(t) = y вын (t) + y св (t).
Здесь yсв(t) — общее решение однородного дифференциального уравнения , то есть уравнения с нулевой правой частью:
a o y (n) + a 1 y (n-1) + . + a (n-1) y’ + a (n) y = 0.
Физически это означает, что все внешние воздействия сняты и система абсолютно свободна, ее движения определяются лишь собственной структурой. Поэтому решение данного уравнения называется свободной составляющей общего решения. y вын (t) — частное решение неоднородного дифференциального уравнения , под которым понимается уравнение с ненулевой правой частью. Физически это означает, что к системе приложено внешнее воздействие u(t) . Поэтому вторая составляющая общего решения называется вынужденный . Она определяет вынужденный установившийся режим работы системы после окончания переходного процесса.

Можно провести аналогию между САУ и пружиной, колебания которой описываются аналогичным дифференциальным уравнением (рис.62). Оттянем пружину, а затем отпустим, предоставив ее самой себе. Пружина будет колебаться в соответствии со свободной составляющей решения уравнения, то есть характер колебаний будет определяться только структурой самой пружины. Если в момент времени t = 0 подвесить к пружине груз, то на свободные колебания наложится внешняя сила Р . После затухания колебаний, описываемых только свободной составляющей общего решения, система перейдет в новый установившийся режим, характеризуемый вынужденной составляющей y вын = y(t ![]()
 ) . Если внешнее воздействие само будет изменяться по синусоидальному закону P = P o sin(
) . Если внешнее воздействие само будет изменяться по синусоидальному закону P = P o sin( t +
t +  ) , то после затухания переходного процесса система будет совершать вынужденные колебания с той же частотой, что и вынуждающая сила, то есть y вын = y max sin(t + y).
) , то после затухания переходного процесса система будет совершать вынужденные колебания с той же частотой, что и вынуждающая сила, то есть y вын = y max sin(t + y).
Каждая составляющая общего решения уравнения динамики ищется отдельно. Вынужденная составляющая ищется на основе решения уравнения статики для данной системы для времени t ![]() . Свободная составляющая представляет собой сумму из n отдельных составляющих:
. Свободная составляющая представляет собой сумму из n отдельных составляющих:  , где p i корни характеристического уравнения D(p) = a 0 p n + a 1 p n -1 + a 2 p n -2 + . + a n = 0 . Корни могут быть либо вещественными p i = a i , либо попарно комплексно сопряженными p i = a i ± ji . Постоянные интегрирования А i определяются исходя из начальных и конечных условий, подставляя в общее решение значения u, y и их производные в моменты времени t = 0 и t
, где p i корни характеристического уравнения D(p) = a 0 p n + a 1 p n -1 + a 2 p n -2 + . + a n = 0 . Корни могут быть либо вещественными p i = a i , либо попарно комплексно сопряженными p i = a i ± ji . Постоянные интегрирования А i определяются исходя из начальных и конечных условий, подставляя в общее решение значения u, y и их производные в моменты времени t = 0 и t ![]() .
.

Каждому отрицательному вещественному корню соответствует экспоненциально затухающая во времени составляющая y св (t) i , каждому положительному — экспоненциально расходящаяся, каждому нулевому корню соответствует y св (t) i = const (рис.63). Пара комплексно сопряженных корней с отрицательной вещественной частью определяет затухающие колебания с частотой i , при положительной вещественной части — расходящиеся колебания, при нулевой — незатухающие (рис.64).

Так как после снятия возмущения y вын (t) = 0 , то устойчивость системы определяется только характером свободной составляющей y св (t) . zПоэтому условие устойчивости систем по Ляпунову формулируется так: в устойчивой системе свободная составляющая решения уравнения динамики, записанному в отклонениях, должна стремиться к нулю, то есть затухать.

Исходя из расположения на комплексной плоскости корни с отрицательными вещественными частями называются левыми , с положительными — правыми (рис.65).
Поэтому условие устойчивости линейной САУ можно сформулировать следующим образом: для того, чтобы система была устойчива, необходимо и достаточно, чтобы все корни ее характеристического уравнения были левыми. Если хотя бы один корень правый, то система неустойчива. Если один из корней равен нулю (в системах, где a n = 0 ), а остальные левые, то система находится на границе апериодической устойчивости . Если равны нулю вещественные части одной или нескольких пар комплексно сопряженных корней, то система находится на границе колебательной устойчивости .
Правила, позволяющие судить о знаках корней характеристического уравнения без его решения, называются критериями устойчивости . Их можно разделить на алгебраические (основаны на составлении по данному характеристическому уравнению по определенным правилам алгебраических выражений, по которым можно судить об устойчивости САУ) и частотные (основаны на исследовании частотных характеристик).
8.2. Алгебраические критерии устойчивости
8.2.1. Необходимое условие устойчивости
Характеристическое уравнение системы с помощью теоремы Виета может быть записано в виде
D(p) = a o p n + a 1 p n-1 + a 2 p n-2 + . + a n = a o (p-p 1 )(p-p 2 ). (p-p n ) = 0,
где p 1 , p 2 , . p n — корни этого уравнения. Если система устойчива, значит все корни левые, то есть вещественные части всех корней
отрицательны, что можно записать как a i = -|a i | . Подставим их в уравнение:
a 0  (p + |a 1 |)(p + |a 2 | — j2)(p + |a 2 | + j2). = 0.
(p + |a 1 |)(p + |a 2 | — j2)(p + |a 2 | + j2). = 0.
Перемножая комплексно сопряженные выражения, получим:
a 0 (p + |a 1 |)((p + |a 2 |)2 + (2)2). = 0.
После раскрытия скобок должно получиться выражение
a 0 p n + a 1 p n-1 + a 2 p n-2 + . + a n = 0.
Так как в скобках нет ни одного отрицательного числа, то ни один из коэффициентов a 0 ,a 1 . a n не будет отрицательным. Поэтому необходимым условием устойчивости САУ является положительность всех коэффициентов характеристического уравнения: a 0 > 0, a 1 > 0, . , a n > 0 . В дальнейшем будем рассматривать только уравнения, где a 0 > 0 . В противном случае уравнение домножается на -1.
Рассмотренное условие является необходиным, но не достаточным условием. Необходимые и достаточные условия дают алгебраические критерии Рауса и Гурвица.
8.2.1. Критерий Рауса
Раус предложил критерий устойчивости САУ в виде алгоритма, по которому заполняется специальная таблица с использованием коэффициентов характеристического уравнения:
1) в первой строке записываются коэффициенты уравнения с четными индексами в порядке их возрастания;
2) во второй строке — с нечетными;
3) остальные элементы таблицы определяется по формуле: c k,i = c k+ 1,i — 2 — ric k + 1,i — 1 , где ri = c 1,i — 2 /c 1,i — 1 , i  3 — номер строки, k — номер столбца.
3 — номер строки, k — номер столбца.
4) Число строк таблицы Рауса на единицу больше порядка характеристического уравнения.
Определение устойчивости систем автоматического управления промышленными роботами
Введение
Необходимым условием работоспособности системы автоматического управления (САУ), является её устойчивость. Под устойчивостью принято понимать свойство системы восстанавливать состояние равновесия, из которого она была выведена под влиянием возмущающих факторов после прекращения их воздействия [1].
Постановка задачи
Теория просто и кратко
Анализ устойчивости системы по методу Михайлова сводится к построению характеристического многочлена замкнутой системы (знаменатель передаточной функции), комплексной частотной функции (характеристического вектора):
 (1)
(1)
где  и
и  – соответственно вещественная и мнимая части знаменателя передаточной функции, по виду которой можно судить об устойчивости системы.
– соответственно вещественная и мнимая части знаменателя передаточной функции, по виду которой можно судить об устойчивости системы.
Замкнутая САУ устойчива, если комплексная частотная функция  , начинаясь на
, начинаясь на
стрелки начало координат, проходя последовательно n квадрантов, где n – порядок характеристического уравнения системы, т. е.
 (2)
(2)

Рисунок 1. Амплитудно-фазовые характеристики (годографы) критерия Михайлова: а) – устойчивой системы; б) – неустойчивой системы (1, 2) и системы на границе устойчивости (3)
САУ электроприводом манипулятора промышленного робота (МПР)

Рисунок 2 – Структурная схема САУ электроприводом МПР
Передаточная функция данной САУ имеет следующее выражение [2]:
(3)
где kу – коэффициент усиления усилителя, kм – коэффициент пропорциональности частоты вращения двигателя величине напряжения на якоре, Tу – электромагнитная постоянная времени усилителя, Tм – электромеханическая постоянная времени двигателя с учётом инерции нагрузки (по своим динамическим характеристикам двигатель представляет собой передаточную функцию последовательно соединённых инерционного и интегрирующего звеньев), kдс – коэффициент пропорциональности между входной и выходной величинами датчика скорости, K – коэффициент усиления главной цепи:  .
.
Численные значения в выражение передаточной функции следующие:
K = 100 град / (В∙с); kдс = 0,01 В / (град∙с); Tу = 0,01 с; Tм = 0,1с.
Далее запишем характеристический многочлен замкнутой системы
 заменив s на
заменив s на  :
:
(4)
Решение на Python
Здесь следует отметить, что подобные задачи на Python ещё никто не решал, во всяком случае я не нашёл. Это было связано с ограниченными возможностями работы с комплексными числами. С появлением SymPy можно сделать следующее:
Где I мнимая единица, w- круговая частота, T1= Tу = 0.01 ,T2= Tм = 0.1
Получим развёрнутое выражение для многочлена:
Характеристический многочлен замкнутой системы –
-I*T1*T2*w**3 — T1*w**2 — T2*w**2 + I*w + 1
Сразу видим, что многочлен третьей степени. Теперь получим мнимую и действительную части в символьном отображении:
Действительная часть Re= -T1*w**2 — T2*w**2 + 1
Мнимая часть Im= -T1*T2*w**3 + w
Сразу видим вторую степень действительной части и третью мнимой. Подготовим данные для построения годографа Михайлова. Введём численные значения для T1 и T2, и будем менять частоту от 0 до 100 с шагом 0.1 и построим график:

Из графика не видно, то годограф начинается на действительной положительной оси. Нужно изменить масштабы осей. Приведу полный листинг программы:
Характеристический многочлен замкнутой системы — -I*T1*T2*w**3 — T1*w**2 — T2*w**2 + I*w + 1
Действительная часть Re= -T1*w**2 — T2*w**2 + 1
Мнимая часть Im= -T1*T2*w**3 + w
Теперь уже видно, что годограф начинается на действительной положительной оси. САУ устойчива, n=3, годограф совпадает с приведённым на первом рисунке.
Дополнительно убедится в том, что годограф начинается на действительной оси можно дополнив программу следующим кодом для w=0:
Начальная точка М(1,0)
САУ сварочного робота
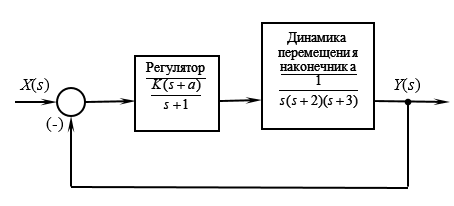
Рисунок 3. Структурная схема САУ позиционированием НСУ
Характеристическое уравнение данной САУ будет иметь вид [1]:

где K – варьируемый коэффициент усиления системы, a – определённая положительная константа. Численные значения: K = 40; a = 0,525.
Далее путём замены s на , получим функцию Михайлова:
 (5)
(5)
Решение на Python
Характеристический многочлен замкнутой системы — w**4 — 6*I*w**3 — 11*w**2 + 46*I*w + 21
Начальная точка М(21,0)
Действительная часть Re= w**4 — 11*w**2 + 21
Мнимая часть Im= -6*w**3 + 46*w
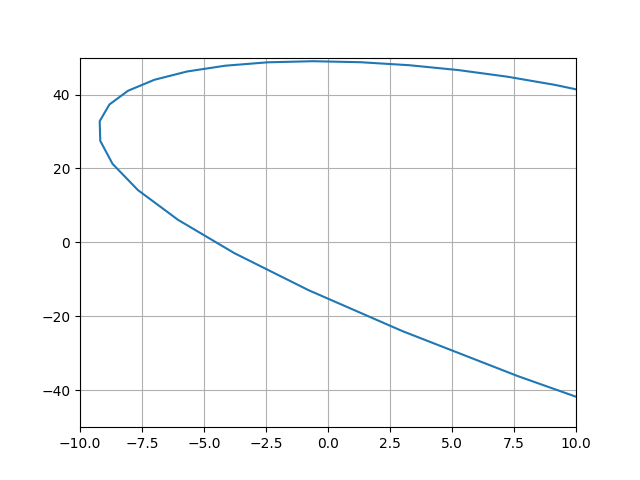
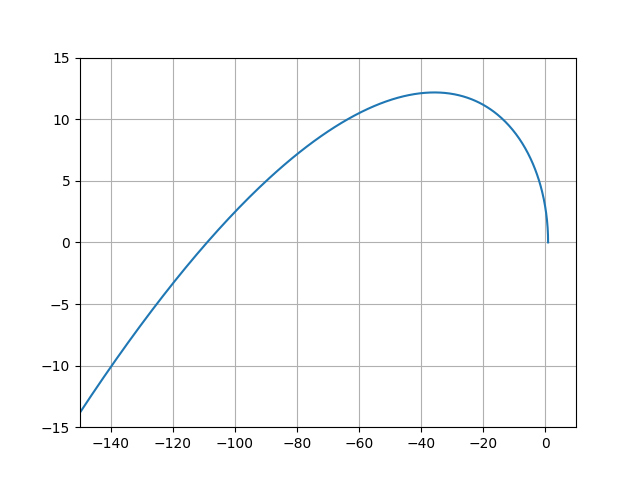
Построенный годограф Михайлова, начинаясь на вещественной положительной оси (М (21,0)), огибает в положительном направлении начало координат, проходя последовательно четыре квадранта, что соответствует порядку характеристического уравнения. Значит, данная САУ позиционированием НСУ – устойчива.
Выводы
При помощи модуля SymPy Python получен простой и наглядный инструмент для решения задач расчёта устойчивости систем автоматического управления, что является обязательным условием работоспособности любого промышленного робота и манипулятора.
http://toehelp.ru/theory/tau/lecture08.htm
http://habr.com/ru/post/340554/