Пуск двигателя постоянного тока независимого возбуждения до основной угловой скорости
Дата добавления: 2015-09-15 ; просмотров: 4388 ; Нарушение авторских прав
Переходный процесс пуска двигателя постоянного тока независимого возбуждения до основной скорости происходит в случае питания двигателя от сети постоянного тока при замыкании в цепи якоря выключателя К (рис. 4.1). В приведенной схеме постоянно включен резистор, следовательно, общее сопротивление цепи якоря

При исследовании процесса пуска полагаются неизменными: магнитный поток двигателя Ф, напряжение сети U и момент нагрузки Mс. Кроме того, индуктивность обмотки якоря принимается Lя= 0.
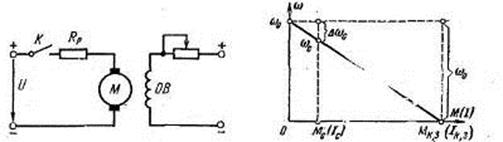
Рис. 4.1. Принципиальная схе Рис, 4.2. Пусковая механичес-
мa пуска двигателя постоянного кая характеристика двигателя
тока независимого возбуждения постоянного тока независимого
в одну ступень, возбуждения.
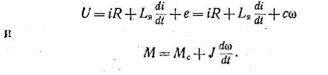
Уравнения электрического и механического равновесия системы при пуске:
 (4.1)
(4.1)
 (4.2)
(4.2)
Если из (4.2) определить значение тока якоря i и подставить его в (4.1), а затем разделить его левую и правую части на с, то после несложных преобразований получим:
 (4.3)
(4.3)
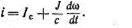
где  0= U/c— угловая скорость двигателя при идеальном холостом ходе;
0= U/c— угловая скорость двигателя при идеальном холостом ходе;  с= MсR/c 2 — перепад угловой скорости при нагрузке моментом Мс (рис. 4.2); Тм = JRIc 2 = J 0/Mк,з — электромеханическая постоянная времени.
с= MсR/c 2 — перепад угловой скорости при нагрузке моментом Мс (рис. 4.2); Тм = JRIc 2 = J 0/Mк,з — электромеханическая постоянная времени.
Электромеханической постоянной времени называется время, в течение которого привод, обладающий моментом инерции J, разгоняется без нагрузки из неподвижного состояния до угловой скорости идеального холостого хода й0 при неизменном моменте, равном моменту короткого замыкания MK,3. Необходимо отметить, что постоянная времени зависит от Мк,з .С увеличением сопротивления цепи якоря момент Мк,3 уменьшается и соответственно увеличивается постоянная времени. Электромеханическая постоянная времени не зависит от нагрузки.
Уравнение (4.2) может быть записано иначе:

Решение этого уравнения дает:
 (4.4)
(4.4)
где С– постоянная интегрирования, определяемая по начальным условиям переходного режима.
Для t=0 начальное значение угловой скорости = нач, поэтому

Теперь легко получить уравнение для угловой скорости двигателя при пуске в общем виде:
 (4.5)
(4.5)
где ωс — установившаяся угловая скорость двигателя при моменте нагрузки Мс (рис. 4.2).
В частном случае, когда пуск двигателя совершается под нагрузкой из неподвижного состояния ( нач = 0),
 (4.6)
(4.6)
При пуске без нагрузки до установившейся угловой скорости 0
 (4.7)
(4.7)
Аналогичные формулы получаются, если вместо угловой скорости использовать частоту вращения двигателя п, об/мин, приводимую в каталогах.
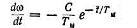
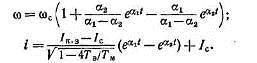
На рис. 4.3 представлены кривые = f(t) при пуске двигателя постоянного тока независимого возбуждения под нагрузкой (кривая 1) и без нагрузки (кривая 2). Согласно (4.6) и (4.7) процесс пуска теоретически заканчивается за бесконечно большое время. Однако практически можно считать процесс пуска закончившимся при tп = = (3  4) Тм, так как угловая скорость в этом случае отличается от установившегося значения не более чем на 5—2 %. Из (4.6) вытекает, что
4) Тм, так как угловая скорость в этом случае отличается от установившегося значения не более чем на 5—2 %. Из (4.6) вытекает, что
Таким образом, для t=3 Тм угловая скорость привода отличается от установившегося значения не более чем на 5 %, и можно считать, что неустановившийся процесс к этому времени практически закончится.
Если бы пуск двигателя совершался с неизменным моментом, равным Мк,3, то угловая скорость двигателя во времени изменялась бы по прямой Оа при пуске двигателя без нагрузки и по Об — при пуске под нагрузкой (рис. 7.3).
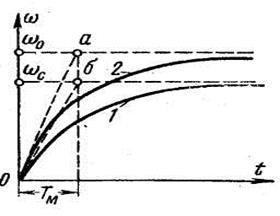
Рис. 4.3 Кривые ω==f(t) при пуске двигателя постоянного
тока независимого возбуждения в одну ступень.
Следовательно, если провести через начало координат касательную к кривой 2 до пересечения с горизонталью, проходящей через точку 0, то полученный отрезок 0а даст в определенном масштабе значение t = Тм. Если же аналогичным путем провести касательную к прямой 1, то отрезок сб также будет равен Тм.
Зависимость тока в цепи якоря от времени при пуске двигателя определяется из (4.2):
Определив из (4.4)
и подставив значение производной в уравнение для тока, получим:
 (4.8)
(4.8)
Для начальных условий при t = 0; i = Iнач постоянная интегрирования

Подставив постоянную интегрирования С в (4.8), найдем:
 (4.9)
(4.9)
Начальное значение тока в общем виде определяется по формуле

В частном случае, когда пуск совершается из неподвижного состояния двигателя, ЭДС его равна 0 и Iнач = Iкз = U/R.
Ток в якоре при этом выражается зависимостью
 (4.10)
(4.10)
При пуске без нагрузки, когда Iс = 0,
 (4.11)
(4.11)
По (4.10) и (4.11) построены кривые i= f(t), приведенные на рис. 4.4.
Из рассмотрения (4.5), (4.6), а также (4.10) и (4.11) можно заключить, что если механическая характеристика двигателя линейна и момент нагрузки постоянен, то = f(t) и i=f1(t) выражаются простыми экспоненциальными зависимостями.
При многоступенчатом резисторном пуске двигателя постоянного тока независимого возбуждения и постоянном напряжении сети задаются обычно определенными границами колебаний пускового тока или пускового момента. В этом случае для нахождения времени пуска удобнее пользоваться в качестве исходного не уравнением угловой скорости, а уравнением тока (4.9).
Процесс пуска двигателя в несколько ступеней, изображенный на рис. 4.5, характерен тем, что ток двигателя во время пуска колеблется в пределах от I1 до I2. В начале пуска Iнач = I1, далее по мере ускорения двигателя растет его ЭДС, вследствие чего начинает уменьшаться ток в цепи якоря двигателя, а следовательно, и момент двигателя. Когда ток достигнет некоторого значения I2, выключается часть пускового резистора с таким расчетом, чтобы ток двигателя снова достиг значения I1 и т. д.
Найдем время tx, в течение которого ток двигателя изменяется от I1 до I2. Для этого воспользуемся уравнением (4.9), написав его в следующем виде:
 (4.12)
(4.12)
где I1 и I2 — границы изменения пускового тока (рис. 4.5); tx — время разбега двигателя на рассматриваемой ступени пускового резистора; Тмх — электромеханическая постоянная времени для той же ступени.
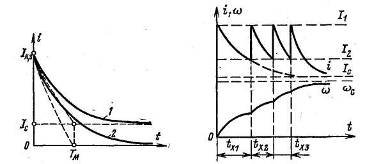
Рис. 4.4. Кривые i = f(t) при Рис. 4.5. Графики при реостат-
пуске двигателя постоянного ном пуске двигателя постоян-
тока независимого возбуждения ного тока независимого воз-
в одну ступень. буждения в несколько ступе-
1-пуск под нагрузкой; 2-пуск ней.
Постоянная времени для каждой ступени резистора соответствует суммарному сопротивлению цепи якоря.
Решая (4.12) относительно времени разбега, находим:
 (4.13)
(4.13)
Если значение тока нагрузки Iс не изменяется, то под
знаком логарифма стоит постоянная величина и, следовательно, можно написать:
 (4.14)
(4.14)
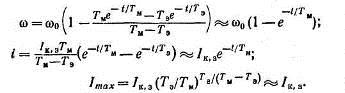
По мере выведения резистора сопротивление цепи якоря уменьшается, а следовательно, уменьшается и электромеханическая постоянная времени, что приводит в свою очередь к уменьшению времени разбега на каждой последующей ступени, т. е. tx1 > tx2 > tx3 и т. д.
Приведенная на рис. 4.5 зависимость i= f (t) построена на основании (4.9) с учетом сказанного выше, а кривая угловой скорости двигателя = f(t) построена по (4.5). Время переходного процесса на последней ступени (при I = Iс или = с) получается равным бесконечности.
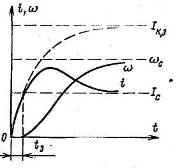
Рис. 4.6 Графики =f(t) и i=f(t) при пуске в одну ступень под нагрузкой двигателя постоянного тока независимого возбуждения, построенные с учетом электромагнитной инерции якоря.
Практически для этой ступени надо принимать подобно предыдущему

В тех случаях, когда время протекания электромагнитных процессов соизмеримо со временем протекания механических процессов, приходится учитывать и влияние электромагнитной инерции цепи якоря, которым мы до сих пор пренебрегали. На рис. 4.6 показаны кривые пуска двигателя при постоянном напряжении сети и учете индуктивности якоря. Как видно из рис. 4.6, пуск двигателя состоит из двух этапов.
Первый этап: якорь двигателя неподвижен, пока ток в якоре не достигнет значения, необходимого для создания момента трогания. На этом этапе увеличение тока двигателя зависит от скорости протекания электромагнитного
процесса, определяемого уравнением напряжений для цепи якоря двигателя:

 Решение (4.15) при индуктивности якоря Lя = const дает закон изменения тока в якоре при неподвижном якоре
Решение (4.15) при индуктивности якоря Lя = const дает закон изменения тока в якоре при неподвижном якоре
где Iк,3=U/R—ток короткого замыкания двигателя; Тэ=L/R — электромагнитная постоянная времени цепи якоря; она имеет размерность времени и определяет скорость протекания электромагнитных процессов.
Кривая тока, построенная по (4.16), изображена на рис. 4.6 в пределах промежутка времени t3 сплошной кривой, а за его пределами—штриховой. Время t3. которое называют временем запаздывания, определяется из (4.16) при подстановке тока i = Iс. В этом случае
 (4.17)
(4.17)
Следует отметить, что в действительности время запаздывания будет несколько больше времени, подсчитанного по (4.17). Это дополнительное запаздывание пуска двигателя объясняется тормозящим влиянием вихревых токов, возникающих в стали двигателя.
По истечении времени t3 якорь начнет вращаться. Угловая скорость двигателя возрастает, и ЭДС, возникающая в якоре, влияет на ток двигателя. Теперь уже оба процесса — электромагнитный и электромеханический протекают совместно, составляя единый процесс пуска двигателя. Расчет тока якоря и угловой скорости двигателя при Ф = const необходимо вести, исходя из следующих уравнений:
 (4.18)
(4.18)
Разделив обе части последнего равенства на с, получим:
 (4.19)
(4.19)
Совместное решение уравнений (4.18) и (4.19) приводит к линейному дифференциальному уравнению второго порядка относительно
 (4.20)
(4.20)
где с — установившееcя значение угловой скорости при моменте нагрузки Мc.
Решение этого дифференциального уравнения имеет вид:
 (4.21)
(4.21)
где a1 a2 — корни характеристического уравнения а 2 +1/Тэа+1/ТэТм = 0, а1,2=1/2Тэ(1 
 );A,
);A,
В — постоянные интегрирования, определяющиеся начальными условиями.
Соответственно для тока:
 (4.22)
(4.22)
При условии, что Тм > 4 Тэ, корни уравнения а1 и a2 имеют действительные отрицательные значения, а выражения для угловой скорости и тока с учетом постоянных интегрирования имеют вид:
 (4.23)
(4.23)
Кривые угловой скорости и тока, полученные по (4.23) и (4.24), показаны на рис. 4.6. Угловая скорость асимптотически стремится к с, а ток, достигнув максимума уменьшается, асимптотически приближаясь к значению Iс.
 (4.25)
(4.25)
В процессе прямого пуска двигателя индуктивность якоря ограничивает пик тока и увеличивает время пуска. Из (4.25) следует, что максимум тока зависит от соотношения постоянных времени Тэ и Тм. Реальное соотношение этих постоянных времени таково, что ограничение тока при прямом пуске оказывается незначительным и пик тока превосходит допустимое по условиям коммутации значение. Поэтому прямой пуск (без добавочных резисторов) практически недопустим для двигателей мощностью более 0,5—1 кВт. Для ограничения тока при пуске вводится в цепь якоря пусковой резистор. При этом Тэ уменьшается, а Тм увеличивается настолько, что оказывается ТэТм.
Если ТэТм, то можно приближенно принять:
 |
Тогда при Iс = 0 получим более простые выражения для определения угловой скорости и тока, а именно:
 (4.27)
(4.27)
Как видно из (4.27) — (4.28), при ТэТм (при большом сопротивлении добавочного резистора) индуктивность якоря практически не сказывается на переходных процессах.
Пик тока при прямом пуске можно попытаться уменьшить введением в якорь реактора (индукционной катушки). Однако при этом процесс разбега приобретает нежелательный колебательный характер, если 4Тэ > Тм.
Уравнение для определения угловой скорости в данном случае:
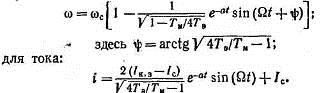 |
Из (4.30) и (4.31) следует, что изменения угловой скорости и тока имеют характер затухающих колебаний (рис. 4.7). Из-за колебательного характера процесса существенно увеличивается время пуска, возникает значительное перерегулирование угловой скорости (превышение над установившимся значением) и снижается эффективность ограничения пика тока. Так, для граничного значения ТВ = Tм/4 при пуске вхолостую
Imax  0,73 IK,3, a при ТВ=1,25 Тм пик тока Imax 0,52 Iк,з, что обычно превышает допустимый по условиям коммутации ток. Поэтому пуск с индукционной катушкой на практике не применяют, а используют пусковые резисторы, при наличии которых влияние индуктивности якоря на процесс, как было показано выше, несущественно.
0,73 IK,3, a при ТВ=1,25 Тм пик тока Imax 0,52 Iк,з, что обычно превышает допустимый по условиям коммутации ток. Поэтому пуск с индукционной катушкой на практике не применяют, а используют пусковые резисторы, при наличии которых влияние индуктивности якоря на процесс, как было показано выше, несущественно.
| | | следующая лекция ==> | |
| Электроприводы переменного тока | | | Динамическое торможение двигателя постоянного тока независимого возбуждения |
Не нашли то, что искали? Google вам в помощь!
Регулирование угловой скорости асинхронных двигателей

Глава двадцать шестая
РЕГУЛИРОВАНИЕ УГЛОВОЙ СКОРОСТИ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
26.1. Возможные способы регулирования угловой скорости
Возможные способы регулирования угловой скорости в асинхронных двигателях вытекают из формулы

Согласно (26.1) скорость ротора двигателя можно регулировать изменением угловой скорости магнитного поля он или скольжения s . Скорость магнитного поля  зависит от частоты питающего напряжения Д и числа пар полюсов р. Изменение скольжения может быть получено за счет изменения электрических потерь в цепи ротора (регулированием подводимого напряжения или включением в цепь ротора добавочного резистора) или введения добавочной ЭДС в эту цепь.
зависит от частоты питающего напряжения Д и числа пар полюсов р. Изменение скольжения может быть получено за счет изменения электрических потерь в цепи ротора (регулированием подводимого напряжения или включением в цепь ротора добавочного резистора) или введения добавочной ЭДС в эту цепь.
Все указанные способы регулирования скорости находят практическое применение. Рассмотрим их подробнее. Оценку каждого из способов будем производить по следующим показателям: 1) возможному диапазону регулирования; 2) плавности регулирования; 3) изменению КПД привода при регулировании.
26.2. Регулирование угловой скорости изменением частоты f 1
Из всех возможных способов регулирования этот способ позволяет плавно изменять угловую скорость в наиболее широком диапазоне (до 10:1, а иногда и более). Для его осуществления требуется, чтобы двигатель (или группа двигателей) получал питание от отдельного источника (рис. 26.1). В качестве такого источника могут быть использованы электромеханические или статические преобразователи частоты. В связи с развитием полупроводниковой техники в настоящее время наиболее предпочтительными являются полупроводниковые статические преобразователи.
В зависимости от требований к механическим характеристикам асинхронного двигателя при частотном регулировании одновременно с изменением частоты f 1 приходится по определенному закону изменять и подводимое к обмотке статора напряжение U 1.
Максимальный момент двигателя приближенно (пренебрегая сопротивлением r 1) определяется по формуле

Учитывая, что и  , получаем
, получаем

где k 1 — постоянный коэффициент.
Отношение моментов М MAX при двух значениях частоты f 1 будет равно:

где индексы (1) и (2) относятся к различным угловым скоростям.
 |
Рис. 26.1. Схема регулирования угловой скорости изменением частоты f 1 (ПЧ — преобразователь частоты)
Исходя из (26.2), можно получить в общем виде закон изменения U 1 при регулировании частоты f 1:

Если при регулировании частоты вращения требуется, чтобы М MAX на механических характеристиках при любой частоте f 1 оставался неизменным (регулирование с постоянным моментом), то из (26.3) получим

Откуда следует, что для осуществления регулирования с постоянным моментом необходимо подводимое к обмотке статора напряжение изменять пропорционально его частоте. Отметим, что при осуществлении закона регулирования (26.4) основной магнитный поток машины при различных значениях частоты f 1 практически остается неизменным, т. е.

Механические характеристики двигателя при регулировании с М MAX = const даны на рис. 26.2, а.
Если регулирование происходит с постоянной механической мощностью Р2, то момент М MAX должен изменяться обратно пропорционально частоте вращения, а следовательно, и f 1:

Подставляя (26.5) в (26.3), получаем закон изменения напряжения при регулировании с постоянной мощностью

Механические характеристики для этого случая показаны на рис. 26.2, б.
Соотношения (26.4) и (26.6) являются приближенными, так как не учитывают влияния сопротивления r 1 на MMAX , что наиболее сильно проявляется при малых частотах f 1. Поэтому при U 1/ f 1= const максимальный момент М MAX в зоне малых частот будет уменьшаться (рис. 26.2, а).
 |
Рис. 26.2. Механические характеристики асинхронного двигателя при различных значениях f 1 и M = const ( a ), P 2= const (б)
При частотном регулировании асинхронных двигателей их энергетические характеристики остаются практически неизменными. Поэтому этот способ регулирования является экономичным. Недостатками частотного регулирования являются громоздкость и высокая стоимость источника питания.
26.3. Регулирование угловой скорости изменением числа пар полюсов
Угловая скорость магнитного поля в асинхронном двигателе, а следовательно, и угловая скорость ротора обратно пропорциональна числу пар полюсов. Изменяя число пар полюсов, можно регулировать скорость. Число пар полюсов зависит от шага и схемы соединения обмотки статора.
Для регулирования угловой скорости на статоре в общих пазах можно разместить не одну, а две обмотки, имеющие различные шаги, а следовательно, и различное число пар полюсов. В зависимости от необходимой скорости в сеть подключается та или иная обмотка. Этот способ применяется сравнительно редко, так как он имеет существенный недостаток — плохое использование обмоточного провода (всегда работает только одна из обмоток).
Более часто изменение числа пар полюсов достигается изменением (переключением) схемы соединения уложенной на статоре обмотки. Принцип такого переключения поясняется на рис. 26.3. При переходе с последовательного соединения двух катушек (рис. 26.3, а) на параллельное соединение (рис. 26.3,6) число пар полюсов изменяется с 2 на 1. При наличии фазной обмотки на роторе ее также следует переключать одновременно с обмоткой статора. Поэтому обмотку ротора у таких двигателей выполняют короткозамкнутой. Асинхронные двигатели с переключением числа пар полюсов называют многоскоростными. Они выпускаются на две, три и четыре угловые скорости. Известно большое число схем, позволяющих осуществлять переключение числа пар полюсов. Эти схемы разделяются на схемы регулирования с постоянным моментом и схемы регулирования с постоянной мощностью.

Рис. 26.3. Схемы включения обмотки статора на различное число полюсов
Для примера на рис. 26.4 и 26.5 представлены наиболее часто применяемые схемы соединения обмоток с переключением числа пар полюсов в отношении 2: 1. Обмотки каждой фазы состоят из двух одинаковых частей. При анализе этих схем примем, что при f 1Л= const номинальный ток в каждой части фазы I 1Ф, КПД и cosφ 1 двигателя при обеих частотах вращения будут одинаковыми.
 |
Рис. 26.4. Принципиальная схема соединений обмотки статора с переключением числа полюсов в отношении 2:1 при М= const
Рис. 26.5. Принципиальная схема соединений обмотки статора с переключением числа полюсов в отношении 2:1 при Р2= const
На рис. 26.4, а обе части фазы соединены последовательно, а фазы между собой — в звезду. На рис. 26.4, б половины каждой фазы соединены параллельно, образуя двойную звезду (УУ). С учетом принятых допущений мощности на валу соответственно будут равны:


Мощность P 2(б) соответствует меньшему числу пар полюсов и большей в 2 раза угловой скорости. Мощность P 2(а) соответствует большему числу пар полюсов и меньшей угловой скорости.
Как следует из (26.7), при переходе от меньшей скорости (рис. 26.4, а) к большей (26.4, б) допустимая мощность на валу увеличивается в 2 раза. Вращающий момент в том и другом случае сохраняется неизменным (М(а)=М(б)). Поэтому рассматриваемая схема переключения У/УУ (рис. 26.4) носит название схемы переключения с постоянным моментом.
На рис. 26.5 показана принципиальная схема пересоединения обмотки статора для изменения числа полюсов при постоянной мощности. На рис. 26.5, а две половины каждой фазы соединяют последовательно, а фазы между собой — . в треугольник. На рис.. 26.5, б половины фаз соединяются параллельно, образуя двойную звезду. Соединение по рис. 26.5, а соответствует большему числу пар полюсов и меньшей угловой скорости, а соединение по рис. 26.5, б — меньшему числу пар полюсов и большей угловой скорости.
Соответственно мощности на валу для этих схем


Многоскоростные двигатели применяются для привода станков, вентиляторов, насосов и пр.
26.4. Регулирование угловой скорости изменением подводимого напряжения
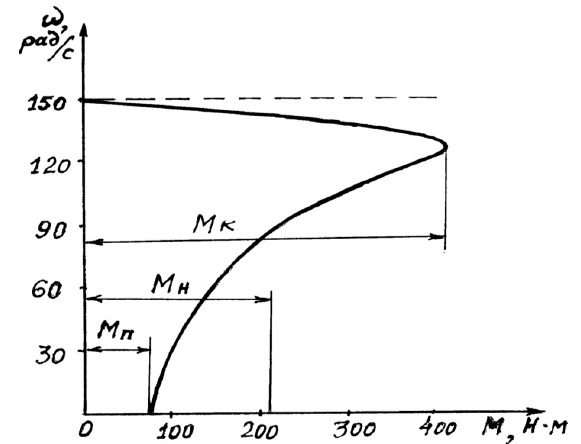
Для регулирования угловой скорости асинхронного двигателя подводимое напряжение к обмотке статора по сравнению с номинальным уменьшается. Так как момент пропорционален  , то механические характеристики при меньшем напряжении пойдут ниже естественной. Если момент нагрузки Мс остается постоянным, то, как это следует из рис. 26.6, при снижении напряжения скольжение будет увеличиваться. Скорость при этом уменьшается. Регулирование скольжения в этом случае возможно в пределах 0 s sKP . Ограничением для увеличения скольжения более sKP является то, что при дальнейшем снижении напряжения на новой механической характеристике М MAX будет меньше М C и двигатель остановится. Для расширения диапазона регулирования следует увеличить sKP за счет повышения активного сопротивления цепи ротора.
, то механические характеристики при меньшем напряжении пойдут ниже естественной. Если момент нагрузки Мс остается постоянным, то, как это следует из рис. 26.6, при снижении напряжения скольжение будет увеличиваться. Скорость при этом уменьшается. Регулирование скольжения в этом случае возможно в пределах 0 s sKP . Ограничением для увеличения скольжения более sKP является то, что при дальнейшем снижении напряжения на новой механической характеристике М MAX будет меньше М C и двигатель остановится. Для расширения диапазона регулирования следует увеличить sKP за счет повышения активного сопротивления цепи ротора.
Изменение подводимого напряжения чаще всего осуществляется с помощью последовательно включенных с двигателем реакторов, подмагничиваемых постоянным током, или за счет импульсной подачи напряжения на обмотки статора. При подмагничивании меняется индуктивное сопротивление реактора, что приводит к изменению падения напряжения в нем, а следовательно, и напряжения, подводимого к двигателю. Применив схему автоматического регулирования тока подмагничивания, можно расширить зону регулирования в область S > SKP и получить при этом жесткие механические характеристики.
 |
Рис. 26.6. Характеристики M = f ( s ) при различных значениях U 1
При импульсной подаче напряжения за счет изменения продолжительности импульса можно менять среднее напряжение на двигателе. Здесь также можно применить схемы автоматического регулирования.
Способ регулирования угловой скорости изменением подводимого напряжения имеет существенный недостаток, состоящий в том, что в этом случае увеличиваются потери и снижается КПД двигателя. При снижении напряжения пропорционально U 1 уменьшается основной магнитный поток машины, вследствие чего при M = MC = const возрастают ток, а следовательно, и электрические потери в роторе. Магнитные потери в стали статора уменьшаются. В зависимости от значения М C при снижении U 1 ток в статоре и электрические потери в его обмотке могут уменьшаться или увеличиваться. Обычно при нагрузках, близких к номинальной, со снижением U 1 полные потери возрастают, что повышает нагрев двигателя. Поэтому рассматриваемый способ регулирования угловой скорости находит применение главным образом для машин небольшой мощности.
26.5. Регулирование угловой скорости включением в цепь ротора добавочного резистора
 Этот способ регулирования применяется в двигателях с фазным ротором. На рис. 26.7 показаны механические характеристики двигателя с различными значениями добавочного активного сопротивления
Этот способ регулирования применяется в двигателях с фазным ротором. На рис. 26.7 показаны механические характеристики двигателя с различными значениями добавочного активного сопротивления  в цепи ротора.
в цепи ротора.
Рис. 26.7. Характеристики М= f(s) при различных значениях
При М C = const в зависимости от значения двигатель будет работать со скольжениями s1-s3 , чему соответствуют угловые скорости ω( 1 ) — ω( 3 ) . Этот способ позволяет плавно, в широких пределах (до s=l ), регулировать угловую скорость. Однако практически он применяется для регулирования скорости в сравнительно узких пределах, так как при увеличении возрастают электрические потери в цепи ротора, при этом происходит также снижение КПД.
В этом случае, как и в предыдущем, электрические потери в цепи ротора увеличиваются пропорционально скольжению  . Однако в отличие от предыдущего способа здесь токи ротора и статора в процессе регулирования при MC=const практически остаются неизменными, и возрастание потерь происходит не в самом роторе, а в регулировочном реостате. С точки зрения нагрева двигателя этот способ регулирования является более благоприятным.
. Однако в отличие от предыдущего способа здесь токи ротора и статора в процессе регулирования при MC=const практически остаются неизменными, и возрастание потерь происходит не в самом роторе, а в регулировочном реостате. С точки зрения нагрева двигателя этот способ регулирования является более благоприятным.
Механические и электрические характеристики асинхронных электродвигателей
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных.
Механические характеристики электродвигателя представляют собой зависимость угловой скорости ω от развиваемого им момента на валу, т.е. ω = f (M). Различают естественные и искусственные механические характеристики электродвигателя.
Естественная механическая характеристика соответствует работе электродвигателя с номинальными параметрами при нормальной схеме включения. Искусственная механическая характеристика соответствует работе электродвигателя с параметрами, отличающимися от номинальных, например, при введении сопротивления, изменении питающего напряжения, частоты и др.
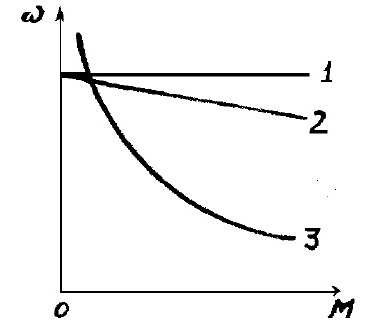
Механические характеристики электродвигателей: 1 — абсолютно жесткая характеристика, 2 — жесткая характеристика, 3 — мягкая механическая характеристика
Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся.
Естественная механическая характеристика асинхронного двигателя
Для примера рассмотрим АИР80В2У3.

Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.

Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.

Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.

Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √( 3046 2 — 2650 2 ) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
Скорость вращательного движения на практике часто оценивается частотой вращения, то есть числом оборотов вала двигателя в минуту. Угловая скорость выражается в радианах в секунду (рад/с). Угловой скоростью удобнее пользоваться при выводе формул и проведении расчетов, частотой вращения — при практической оценке скоростных свойств двигателей.
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.

Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду.
Но поскольку двигатель асинхронный, то п оявление в обмотке ротора ЭДС и вращающего момента возможно только при наличии разности между скоростями магнитного поля и ротора. Это различие называют скольжением (s). Ротор вращается с отставанием на величину скольжения .
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ( ( n – n1 )/ n) *100%
Для нашего примера s = ( (3000 – 2870)/3000 ) *100% = 4,3%.
Угловая скорость асинхронного двигателя

Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
Линейная скорость асинхронного электродвигателя
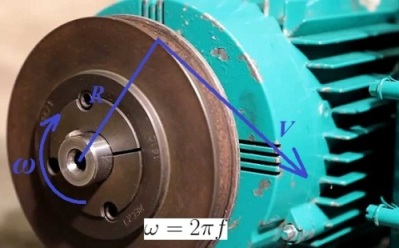
Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
Номинальный вращающий момент асинхронного двигателя
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.

Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
http://pandia.ru/text/79/399/25418.php
http://electrik.info/main/school/1159-harakteristiki-asinhronnyh-elektrodvigateley.html