Лекция №5. ДИНАМИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
4.1. Динамика поступательного движения твердого тела.
Движение любого твердого тела можно рассматривать как сумму поступательного движения его центра масс и вращательного движения относительно оси, проходящей через его центр масс.
Разобьем твердое тело на элементарные массы mi , тогда его можно представить как систему материальных точек, взаимное расположение которых остается неизменным. Поэтому для описания поступательного движения тела можно использовать закон изменения импульса механической системы
p = $$<\sum_
Также можно воспользоваться понятием центра масс и к поступательному движению твердого тела применить закон движения центра масс
Центр масс твердого тела движется как материальная точка, в которой сосредоточена масса тела, и на которую действуют все силы, приложенные к телу. Уравнение (4.1.2) дает возможность установить закон движение центра масс твердого тела, если известна масса тела и действующие на него силы. Если тело движется только поступательно, то это уравнение будет определять не только закон движения центра масс, но и любой другой точки тела.
4.2. Момент импульса. Момент силы.
Момент силы. Векторная величина, равная векторному произведению радиус-вектора r точки, проведенному из полюса в точку приложения силы, на силу F называется моментом силы материальнойточки относительно некоторого центра
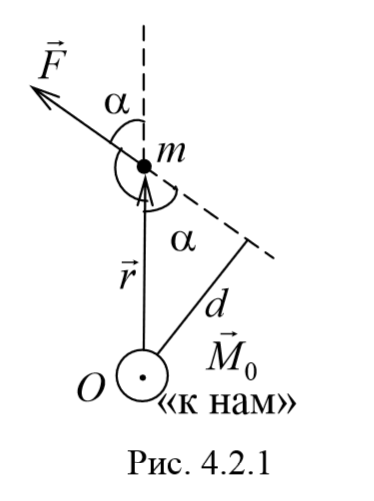
Пусть на частицу массой m действует сила F , а ее положение в некоторой инерциальной системе отсчета характеризуется радиус-вектором r относительно начала координат. Тогда момент силы частицы относительно точки O дается уравнением (4.2.1). Направление момента силы M совпадает с направлением поступательного движения правого винта при его вращении от радиус-вектора r к силе F , и он перпендикулярен как вектору r , так и вектору F (рис. 4.2.1). Тогда модуль вектора момента силы равен

где d=r sin α − плечо силы относительно точки O .
Плечо силы − это расстояние, измеряемое по перпендикуляру от оси вращения до линии, вдоль которой действует сила.
Таким образом, модуль момента силы относительно оси, есть скалярная величина, характеризующая вращательное движение действия силы и равная произведению модуля силы F , действующей на твердое тело, на плечо силы d относительно этой оси.
Если на тело действует несколько сил, то суммарный момент этих сил равен векторной сумме моментов всех сил относительно данной оси:
Момент импульса. Векторная величина, равная векторному произведению радиус-вектора r точки, проведенного из центра на ее импульс m υ называется моментом импульса материальной точки относительно некоторого центра
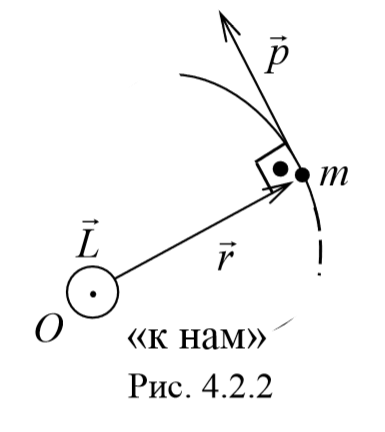
Пусть частица массой m имеет импульс p , а ее положение в некоторой инерциальной системе отсчета характеризуется радиус-вектором r относительно начала координат. Тогда момент импульса частицы относительно точки O дается уравнением (4.2.4). Направление момента импульса совпадает с направлением поступательного движения правого винта при его вращении от радиус-вектора к импульсу p , и он перпендикулярен как вектору r , так и вектору p (рис. 4.2.2). Тогда модуль вектора момента импульса равен
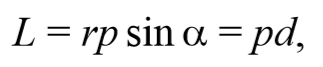
где d − плечо импульса относительно точки O .
Плечо импульса − это расстояние, измеряемое по перпендикуляру от оси вращения до линии, вдоль которой направлен импульс.
Таким образом, модуль вектора момента импульса относительно центра или оси − есть скалярная величина, равная произведению импульса p на плечо импульса d относительно этой оси.
Моментом импульса механической системы относительно некоторого центра называется векторная величина, равная геометрической сумме моментов импульса относительно той же точки всех материальных точек системы

4.3. Основное уравнение динамики вращательного движения относительно точки.
Рассмотрим систему материальных точек массами m1, m2, . mn движущихся со скоростями υ 1, υ 2, . υ n . Пусть на каждую из этих точек действуют: равнодействующие внутренних сил F i 1, F i 2, . F i n , и равнодействующие внешних сил F e 1, F e 2, . F e n .
Запишем уравнения движения частиц:

Умножим каждое уравнение системы (4.3.3) на соответствующий радиус-вектор и получим
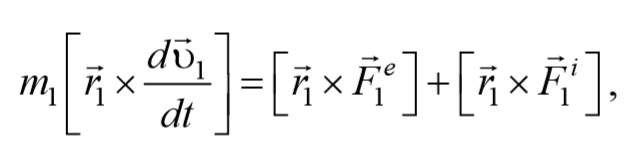
Преобразуем данные уравнения
Сложим эти уравнения и получим

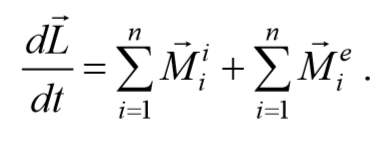
В последнем уравнении:
Таким образом, выражение (4.3.6) можно записать в виде
Учитывая, что моменты внутренних сил попарно уравновешивают друг друга, и сумма моментов всех внутренних сил для любой системы всегда равна нулю, т. е. $$<\sum_
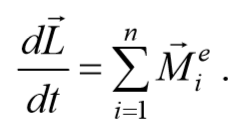
4.4. Закон сохранения момента импульса.
Если момент внешних сил $$<\sum_
закон сохранения момента импульса.
Если момент внешних сил действующих на механическую систему относительно центра оси равен нулю, то момент импульса системы относительно этого центра с течением времени не изменяется.
Можно сказать, что момент силы при вращательном движении является аналогом силы при поступательном движении, момент импульса − аналогом импульса.
Законы изменения и сохранения момента импульса механической системы можно применить и к вращательному движению твердого тела.
4.5. Момент инерции.
Моментом инерции твердого тела относительно данной оси называется физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг этой оси и равная сумме произведений масс всех частиц тела на квадраты их расстояний от той же оси:
Момент инерции зависит только от формы тела и расположения масс относительно оси. [I]=1 кг · м 2 .
Понятие момента инерции было введено при рассмотрении вращения твердого тела. Однако следует иметь в виду, что каждое тело, независимо от того, вращается оно или покоится, обладает определенным моментом инерции относительно любой оси.
Если тело сплошное, то суммирование в выражении (4.5.1) следует заменить на интегрирование:
где R − расстояние от элементарной массы dm до оси вращения.
4.6. Теорема Штейнера. Правило аддитивности
Существуют два свойства момента инерции:
1) Теорема Штейнера: момент инерции тела Iz относительно произвольной оси равен сумме момента инерции Ic относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы тела m на квадрат расстояния a между осями:
2) Правило аддитивности: сумма моментов инерции частей системы относительно оси равен моменту инерции системы относительно данной оси:
Уравнение движения для момента импульса материальной точки
Динамические характеристики вращательного движения. Момент силы. Момент импульса.
При поступательном движении системы все ее точки проходят одинаковые пути, имеют в данный момент времени одинаковые скорости и ускорения. При вращательном движения твердого тела все эти характеристики различны для разных точек вращающегося тела, поэтому и математическая форма 2-го закона Ньютона будет иной. При вращательном движении существенно изменяются сами понятия причины, вызывающей вращение, и величины, определяющей инертность тела.
При поступательном движении динамическими характеристиками являются сила, масса, импульс. При вращательном движении динамическими характеристиками являются момент силы, момент инерции, момент импульса. Эти характеристики можно рассматривать относительно точки вращения (полюса) и относительно оси вращения. В дальнейшем будем рассматривать эти характеристики относительно оси вращения. Определим эти характеристики.
1.Момент силы, действующей на материальную точку, относительно оси вращения.
а) Пусть материальная точка массы m вращается относительно оси ОО ΄. Обозначим r — радиус-вектор, проведенный от оси вращения до точки приложения силы F (Рисунок 10).
Рисунок 10.Вращение материальной точки
Моментом силы F относительно оси вращения называется вектор M, равный векторному произведению радиус-вектора на вектор силы M = [ r∙ F] и направленный по оси вращения в сторону, определяемую по правилу правого буравчика
Модуль вектора момента силы равен M = F∙r∙sinα, где α — угол между векторами rи F.
2. Момент импульса.
Моментом импульса материальной точки относительно оси вращения называется вектор L, равный векторному произведению радиуса-вектора r на вектор импульса P: L = [ r∙P] = [ r∙ mv],
где m, v — соответственно масса и вектор скорости точки. Направление Lопределяется по правилу правого буравчика. Модуль вектора L = mv∙ r∙ sinα, где α — угол между векторами r и v.
3. Момент инерции материальной точки относительно оси вращения
Моментом инерции материальной точки относительно оси вращения называется физическая величина, численно равная произведению массы точки на квадрат расстояния точки до оси вращения (Рисунок 10).
Момент инерции — величина скалярная.
Моментом инерции механической системы относительно неподвижной оси называется физическая величина, равная сумме произведений масс всех точек системы на квадраты их расстояний до оси вращения.
I =  mi∙ ri 2
mi∙ ri 2
Для твердого тела, разбитого на элементарные массы ∆ mi, момент инерции относительно оси равен
I = ∆ mi∙ ri 2 .
Моменты инерции тел правильной геометрической формы могут быть легко вычислены. В Таблице 2 приведены результаты расчетов моментов инерции для тел правильной формы относительно оси вращения ОО’, проходящей через их центр масс.
Для расчета моментов инерции вращающихся тел вокруг оси, не проходящей через центр масс тела, можно использовать теорему Штейнера.
Момент инерции тела относительно произвольной оси АА’ равен сумме момента инерции тела относительно оси ОО’, проходящей через центр масс тела и параллельной данной оси АА’, и произведения массы тела как целого на квадрат расстояния d между осями АА’ и ОО’ (Рисунок 11).
Пример. Применение теоремы Штейнера для расчета момента инерции стержня длины l и массы m (см. Таблицу 2), если ось вращения проходит не через центр масс, а через конец стержня, приводит к следующему:
IАА’ = IОО’ + md 2 =  .
.
Рисунок 12. Вращение стержня вокруг оси 
Уравнение движения для момента импульса материальной точки
В основе динамики материальной точки лежат законы (аксиомы) Ньютона. Напомним ключевые определения и законы.
Система отсчёта, в которой любая материальная точка, не взаимодействующая с другими телами (такая точка называется свободной), движется равномерно и прямолинейно или покоится, называется инерциальной.
инерциальные системы отсчёта (ИСО) существуют
в ИСО приращение импульса материальной точки пропорционально силе и происходит по направлению силы:
`Delta vec p = vec F * Delta t` (1)
Импульсом (или количеством движения) материальной точки называют физическую величину, определяемую произведением её массы на вектор скорости в данной системе отсчёта:
`vec p = m * vec v`.
`vec F` — сумма сил, действующих на материальную точку. Величину `vec F * Delta t` называют импульсом силы за время от `t` до `t + Delta t`, в течение которого силу можно считать неизменной по величине и направлению. Величину `Delta vec p = vec p (t + Delta t) — vec p (t)` называют приращением импульса материальной точки за время от `t` до `t + Delta t`. Поэтому второй закон Ньютона для материальной точки можно сформулировать так:
в ИСО приращение импульса материальной точки равно импульсу силы.
Отметим, что при изучении динамики второй закон Ньютона часто формулируют следующим образом:
в ИСО ускорение материальной точки прямо пропорционально сумме сил, действующих на неё, и обратно пропорционально её массе:
`vec a = vec F/m` (2)
Если масса тела остаётся неизменной, то `Delta vec p = Delta (m vec v) = m Delta vec v`, и соотношение (1) принимает вид `m Delta vec v = vec F Delta t`. С учётом `vec a = (Delta vec v)/(Delta t)` приходим к эквивалентности соотношений (1) и (2) в рассматриваемом случае.
В настоящем Задании представлены задачи, для решения которых привлекается второй закон Ньютона (см.(1)), устанавливающий равенство приращений импульса материальной точки и импульса силы.
при взаимодействии двух материальных точек сила `vecF_(12)`, действующая на первую материальную точку со стороны второй, равна по величине и противоположна по направлению силе `vecF_(21)`, действующей со стороны первой материальной точки на вторую:
1) силы возникают парами и имеют одинаковую природу, они приложены к разным материальным точкам,
2) эти силы равны по величине,
3) они действуют вдоль одной прямой в противоположных направлениях.
Заметим, что согласно третьему закону Ньютона обе силы должны быть равны по величине в любой момент времени независимо от движения взаимодействующих тел. Другими словами, если в системе двух взаимодействующих тел изменить положение одного из тел, то это изменение мгновенно скажется на другом теле, как бы далеко оно ни находилось. На самом деле скорость распространения взаимодействий конечная; она не может превзойти скорость света в вакууме. Поэтому третий закон Ньютона имеет определённые пределы применимости. Однако в классической механике при малых скоростях взаимодействующих тел он выполняется с большой точностью.
Второй закон Ньютона (уравнение движения) можно представить в виде теоремы об изменении импульса материальной точки:
Скорость изменения импульса материальной точки в инерциальной системе отсчёта равна сумме сил, действующих на эту точку.
Напомним, что для решения задач динамики материальной точки следует:
привести «моментальную фотографию» движущегося тела, указать приложенные к нему силы;
выбрать инерциальную систему отсчёта;
составить уравнение (3);
перейти к проекциям приращения импульса и сил на те или иные направления;
решить полученную систему.
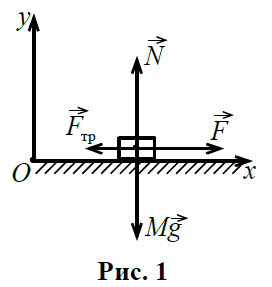
Рассмотрим характерные примеры.
На рис. 1 показаны ИСО и силы, действующие на тело в процессе разгона. По второму закону Ньютона
`(Delta vec p)/(Delta t) = M vec g + vec N + vecF_(«тр») + vec F`.
Переходя к проекциям на горизонтальную ось, находим элементарные приращения импульса в процессе разгона
и в процессе торможения `(F = 0)`
Просуммируем все приращения импульса тела от старта до остановки:
Далее рассмотрим пример, в котором одна из сил зависит от времени.
На какое максимальное расстояние `L_max` улетит мяч, если в процессе удара футболист действует на мяч постоянной по направлению силой, величина которой изменяется по закону, представленному на рис. 2. Длительность удара τ = 8 · 10 — 3 c \tau=8\cdot10^<-3>\;\mathrm c , максимальная сила F max = 3,5 · 10 3 H F_\max=3,5\cdot10^3\;\mathrm H , масса мяча m = 0,5 кг m=0,5\;\mathrm <кг>. Здесь и далее ускорение свободного падения g = 10 м / с 2 g=10\;\mathrm м/\mathrm с^2 . Сопротивление воздуха не учитывайте.
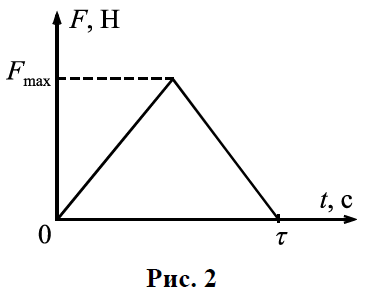
Так как `mg в импульсе силы можно интерпретировать как площадь элементарного прямоугольника со сторонами `F(t)` и `Delta t` на графике зависимости `F(t)`). Тогда импульс силы `F` за время удара равен
и в рассматриваемом случае не зависит от того, в какой именно момент времени сила достигает максимального значения (площадь треугольника равна половине произведения основания на высоту!). Далее находим импульс мяча в момент окончания действия силы
`mv = 1/2 F_max * tau`.
Отсюда находим начальную скорость полёта мяча
`v = (F_max * tau)/(2m) = (3,5 * 10^3 * 8 * 10^-3)/(2 * 0,5) = 28 sf»м/с»`
и максимальную дальность (старт под углом `alpha = pi/4`) полёта
`L_max = (v^2)/g = (28^2)/(10)
В рассматриваемом модельном примере получен несколько завышенный по сравнению с наблюдениями результат.
На вступительных испытаниях и олимпиадах в вузах России регулярно предлагаются задачи динамики, в которых наряду с «традиционными» силами: силой тяжести, силой Архимеда и т. д., на тело действует сила лобового сопротивления. Такая сила возникает, например, при движении тел в жидкостях и газах. Вопрос о движении тел в жидкостях и газах имеет большое практическое значение. Знакомство с действием такого рода сил уместно начинать, как это принято в физике, с простейших модельных зависимостей, в которых сила сопротивления принимается пропорциональной скорости или её квадрату.
Мяч, брошенный с горизонтальной поверхности земли под углом `alpha = 60^@` к горизонту со скоростью `v = 10 sf»м/с»`, упал на землю, имея вертикальную составляющую скорости по абсолютной величине на `delta = 30 %` меньшую, чем при бросании. Найдите время полёта мяча. Считать, что сила сопротивления движению мяча пропорциональна его скорости.
Согласно второму закону Ньютона приращение импульса пропорционально силе и происходит по направлению силы:
`m * Delta vec v = (m vec g — k vec v) * Delta t`.
Переходя к проекциям сил и приращения скорости на вертикальную ось, получаем
`m * Delta v_y = — mg * Delta t — k * v_y * Delta t`.
Заметим, что элементарное перемещение мяча по вертикали равно `Delta y = v_y * Delta t`, и перепишем последнее соотношение в виде:
`m * Delta v_y = — mg * Delta t — k * Delta y`.
Просуммируем все приращения вертикальной проекции импульса по всему времени полёта, т. е. от `t = 0` до `t = T`:
`m * (sum Delta v_y) = — mg * (sum Delta t) — k* (sum Delta y)`.
Переходя к конечным приращениям, получаем
`m (v_y (T) — v_y (0)) = — mg (T — 0) — k (y (T) — y (0))`.
Точки старта и финиша находятся в одной горизонтальной плоскости, поэтому перемещение мяча по вертикали за время полёта нулевое
Тогда `- (1 — delta) mv_0 sin alpha — mv_0 sin alpha = — mgT`. Отсюда находим продолжительность полёта мяча:
`T = (v_0 sin alpha)/(g) (2 — delta) = (10 * sin 60^@)/(10) (2,0 — 0,3)
В следующем примере рассматривается удар, в ходе которого две очень большие силы, «согласованно» действуют во взаимно перпендикулярных направлениях.
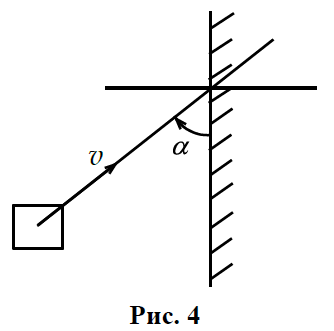
Кубик, движущийся поступательно со скоростью `v` (рис. 4) по гладкой горизонтальной поверхности, испытывает соударение с шероховатой вертикальной стенкой.
Коэффициент трения `mu` скольжения кубика по стенке и угол `alpha` известны. Одна из граней кубика параллельна стенке. Под каким углом `beta` кубик отскочит от стенки? Считайте, что перпендикулярная стенке составляющая скорости кубика в результате соударения не изменяется по величине.
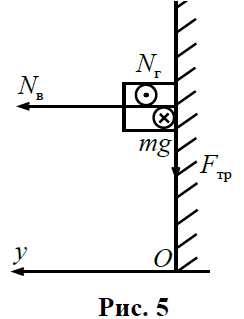
Силы, действующие на кубик в процессе соударения, показаны на рис. 5.
По второму закону Ньютона
`Delta vec p = (m vec g + vecN_(«г») + vecF_(«тр») + vecN_(«в») ) * Delta t`.
Переходя к проекциям на горизонтальные оси `Ox` и `Oy`, получаем
`Delta p_x = — F_sf»тр» Delta t`, `Delta p_y = N_sf»в» Delta t`.
Просуммируем приращения `Delta p_y = N_sf»в» Delta t` по всему времени `tau` соударения, получим:
`sum Delta p_y = p_y (tau) — p_y (0) = mv sin alpha — (- mv sin alpha) = sum_(0 0`, получаем
`bbb»tg» beta = (v_y (tau))/(v_x (tau)) = (sin alpha)/(cos alpha — 2 mu sin alpha)`.
http://s1921687209.narod.ru/1sem/course120/mex/2_2_7.htm
http://zftsh.online/articles/4921