Виды движения по окружности
Угловое движение можно условно разделить на два вида:
- Когда изменяется только направление вектора линейной скорости, а его длина не изменяется.
- Или, когда изменяются обе характеристики вектора линейной скорости.
Во втором случае, для описания движения будем применять более сложные формулы кинематики. Так как появится еще один вид ускорения.
Центростремительное (нормальное) ускорение есть всегда, когда есть движение по окружности, при этом не важно, меняется ли скорость тела по модулю, или не меняется.
Движение по окружности с постоянной по модулю скоростью
Пусть тело движется по окружности, но при этом длина вектора линейной скорости не меняется (рис. 1).
\[\left|\vec

На рисунке 1 указаны: а) – вид сбоку, б) вид сверху, вектор угловой скорости направлен к нам перпендикулярно рисунку.
Скорость будет меняться только по направлению от точки к точке, потому, что на тело действует центростремительная сила \(\displaystyle \vec
Кроме линейной, тело обладает угловой скоростью. Если линейная скорость не изменяется по модулю, то длина вектора угловой скорости не меняется.
На рисунке 1а изображен вектор угловой скорости \(\displaystyle \vec<\omega>\), на рисунке 1б вектор угловой скорости направлен к нам перпендикулярно плоскости рисунка. Направление, в котором тело движется по окружности, указано синей стрелкой.
Тангенциальное ускорение – когда модуль скорости меняется
Тело может увеличивать или уменьшать свою скорость, когда движется по окружности.
В таком случае, дополнительно к нормальному ускорению возникает тангенциальное \(\displaystyle \vec
Тангенциальное ускорение играет роль линейного ускорения при прямолинейном движении тела. Вектор \(\displaystyle \vec
Подобно движению по прямой, вектор ускорения – это первая производная скорости по времени, или вторая производная перемещения по времени.
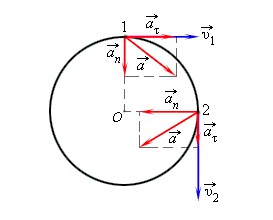
Когда векторы скорости \(\vec

А когда ускорение \(\vec

С линейной скоростью \(\vec
Из рисунков 2, 3 следует: когда появляется тангенциальное ускорение, меняется и угловая скорость. Значит, тангенциальное ускорение \(\vec
Связь между тангенциальным и угловым ускорением выглядит аналогично связи между линейной и угловой скоростью.
В векторном виде
В скалярном виде
\[ \large \boxed < a_<\tau>= \beta \cdot R >\]
\(\displaystyle \vec <\beta>\left( \frac<\text<рад>>
\(\displaystyle \vec< a_<\tau>> \left( \frac<\text<м>>
\(R \left( \text<м>\right)\) – радиус окружности.
Равноускоренное движение по окружности
Угловая скорость увеличивается (рис. 2), когда угловое ускорение сонаправлено с вектором угловой скорости. Когда движение происходит с постоянным ускорением, его называют равноускоренным.
Для решения задач на равноускоренное движение по окружности, поступаем аналогично равноускоренному движению по прямой. Применяем систему из двух уравнений:
\[ \large \boxed < \begin
Первое уравнение системы – это связь между начальной \(\omega_ <0>\) и конечной \(\omega \) скоростью. Второе уравнение – это уравнение движения.
Равнозамедленное движение по окружности
Когда векторы \(\vec<\beta>\) и \(\vec<\omega>\) направлены в противоположные стороны, угловая скорость \(\vec<\omega>\) уменьшается (рис. 3).
Для решения задач кинематики, в которых угловая скорость уменьшается и, движение равнозамедленное, используем систему, состоящую из таких уравнений:
\[ \large \boxed < \begin
Общее ускорение при движении по окружности
Пусть точка движется по окружности и линейная \(\vec
Примечание: Любое ускорение, обозначаемое символом «a», измеряется в метрах, деленных на секунду в квадрате.

Направление вектора общего ускорения указано на рисунке 4а, а для равнозамедленного – на рисунке 4б.
Так как векторы \(\vec
Движение по окружности.
1.Равномерное движение по окружности
2.Угловая скорость вращательного движения.
5.Связь линейной скорости с угловой.
7.Равнопеременное движение по окружности.
8.Угловое ускорение в равнопеременном движении по окружности.
10.Закон равноускоренного движения по окружности.
11. Средняя угловая скорость в равноускоренном движении по окружности.
12.Формулы, устанавливающие связь между угловой скоростью, угловым ускорением и углом поворота в равноускоренном движении по окружности.
 1.Равномерное движение по окружности – движение, при котором материальная точка за равные интервалы времени проходит равные отрезки дуги окружности, т.е. точка движется по окружности с постоянной по модулю скоростью. В этом случае скорость равна отношению дуги окружности, пройденной точкой ко времени движения, т.е.
1.Равномерное движение по окружности – движение, при котором материальная точка за равные интервалы времени проходит равные отрезки дуги окружности, т.е. точка движется по окружности с постоянной по модулю скоростью. В этом случае скорость равна отношению дуги окружности, пройденной точкой ко времени движения, т.е.

и называется линейной скоростью движения по окружности.
Как и в криволинейном движении вектор скорости направлен по касательной к окружности в направлении движения (Рис.25).
2. Угловая скорость в равномерном движении по окружности – отношение угла поворота радиуса ко времени поворота:

В равномерном движении по окружности угловая скорость постоянна. В системе СИ угловая скорость измеряется в(рад/c). Один радиан – рад это центральный угол, стягивающий дугу окружности длиной равной радиусу. Полный угол содержит  радиан, т.е. за один оборот радиус поворачивается на угол радиан.
радиан, т.е. за один оборот радиус поворачивается на угол радиан.
3. Период вращения – интервал времени Т, в течении которого материальная точка совершает один полный оборот. В системе СИ период измеряется в секундах.
4. Частота вращения – число оборотов  , совершаемых за одну секунду. В системе СИ частота измеряется в герцах ( 1Гц = 1
, совершаемых за одну секунду. В системе СИ частота измеряется в герцах ( 1Гц = 1  ) . Один герц – частота, при которой за одну секунду совершается один оборот. Легко сообразить, что
) . Один герц – частота, при которой за одну секунду совершается один оборот. Легко сообразить, что 

Если за время t точка совершает n оборотов по окружности то  .
.
Зная период и частоту вращения, угловую скорость можно вычислять по формуле:
 или
или 
5 Связь линейной скорости с угловой. Длина дуги окружности равна  где
где  центральный угол, выраженный в радианах, стягивающий дугу
центральный угол, выраженный в радианах, стягивающий дугу 
 радиус окружности. Теперь линейную скорость запишем в виде
радиус окружности. Теперь линейную скорость запишем в виде
 , где
, где  .
.
 Часто бывает удобно использовать формулы:
Часто бывает удобно использовать формулы:  или
или  Угловую скорость часто называют циклической частотой, а частоту
Угловую скорость часто называют циклической частотой, а частоту  линейной частотой.
линейной частотой.
6. Центростремительное ускорение. В равномерном движении по окружности модуль скорости остаётся неизменным  , а направление её непрерывно меняется (Рис.26). Это значит, что тело, движущееся равномерно по окружности, испытывает ускорение, которое направлено к центру и называется центростремительным ускорением.
, а направление её непрерывно меняется (Рис.26). Это значит, что тело, движущееся равномерно по окружности, испытывает ускорение, которое направлено к центру и называется центростремительным ускорением.
Пусть за промежуток времени  прошло путь равный дуге окружности
прошло путь равный дуге окружности  . Перенесём вектор
. Перенесём вектор  , оставляя его параллельным самому себе, так чтобы его начало совпало с началом вектора
, оставляя его параллельным самому себе, так чтобы его начало совпало с началом вектора  в точке В. Модуль изменения скорости равен
в точке В. Модуль изменения скорости равен  , а модуль центростремительного ускорения равен
, а модуль центростремительного ускорения равен 
На Рис.26 треугольники АОВ и ДВС равнобедренные и углы при вершинах О и В равны, как углы с взаимно перпендикулярными сторонами АО  и ОВ
и ОВ  Это значит, что треугольники АОВ и ДВС подобные. Следовательно
Это значит, что треугольники АОВ и ДВС подобные. Следовательно  Если
Если  то есть интервал времени принимает сколь угодно малые значения, то дугу
то есть интервал времени принимает сколь угодно малые значения, то дугу  можно приближенно считать равной хорде АВ, т.е.
можно приближенно считать равной хорде АВ, т.е.  . Поэтому можем записать
. Поэтому можем записать  Учитывая, что ВД=
Учитывая, что ВД=  , ОА=R получим
, ОА=R получим  Умножая обе части последнего равенства на , получим
Умножая обе части последнего равенства на , получим  и далее выражение для модуля центростремительного ускорения в равномерном движении по окружности:
и далее выражение для модуля центростремительного ускорения в равномерном движении по окружности:  .
.  Учитывая, что
Учитывая, что  получим две часто применяемые формулы:
получим две часто применяемые формулы:
 ,
,  .
.
Итак, в равномерном движении по окружности центростремительное ускорение постоянно по модулю.
Легко сообразить, что в пределе при  , угол
, угол  . Это значит, что углы при основании ДС треугольника ДВС стремятся значению
. Это значит, что углы при основании ДС треугольника ДВС стремятся значению  , а вектор изменения скорости
, а вектор изменения скорости  становится перпендикулярным к вектору скорости
становится перпендикулярным к вектору скорости  , т.е. направлен по радиусу к центру окружности.
, т.е. направлен по радиусу к центру окружности.
7. Равнопеременное движение по окружности – движение по окружности, при котором за равные интервалы времени угловая скорость изменяется на одну и ту же величину.
8. Угловое ускорение в равнопеременном движении по окружности – отношение изменения угловой скорости к интервалу времени  , в течении которого это изменение произошло, т.е.
, в течении которого это изменение произошло, т.е.
 ,
,
где  начальное значение угловой скорости,
начальное значение угловой скорости,  конечное значение угловой скорости,
конечное значение угловой скорости,  угловое ускорение, в системе СИ измеряется в
угловое ускорение, в системе СИ измеряется в  . Из последнего равенства получим формулы для вычисления угловой скорости
. Из последнего равенства получим формулы для вычисления угловой скорости
 и
и  , если
, если  .
.
Умножая обе части этих равенств на  и учитывая, что
и учитывая, что 
 ,
,  — тангенциальное ускорение, т.е. ускорение, направленное по касательной к окружности , получим формулы для вычисления линейной скорости:
— тангенциальное ускорение, т.е. ускорение, направленное по касательной к окружности , получим формулы для вычисления линейной скорости:
 и
и  , если
, если  .
.
9. Тангенциальное ускорение численно равно изменению скорости в единицу времени и направлено вдоль касательной к окружности. Если  >0,
>0,  >0, то движение равноускоренное. Если
>0, то движение равноускоренное. Если
Дата добавления: 2015-08-08 ; просмотров: 17585 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Движение по окружности
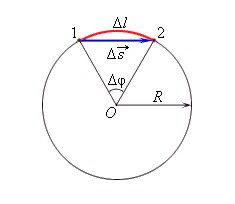
Движение по окружности — простейший случай криволинейного движения тела. Когда тело движется вокруг некоторой точки, наряду с вектором перемещения удобно ввести угловое перемещение ∆ φ (угол поворота относительно центра окружности), измеряемое в радианах.
Зная угловое перемещение, можно вычислить длину дуги окружности (путь), которую прошло тело.
Если угол поворота мал, то ∆ l ≈ ∆ s .
Угловая скорость
При криволинейном движении вводится понятие угловой скорости ω , то есть скорости изменения угла поворота.
Определение. Угловая скорость
Угловая скорость в данной точке траектории — предел отношения углового перемещения ∆ φ к промежутку времени ∆ t , за которое оно произошло. ∆ t → 0 .
ω = ∆ φ ∆ t , ∆ t → 0 .
Единица измерения угловой скорости — радиан в секунду ( р а д с ).
Существует связь между угловой и линейной скоростями тела при движении по окружности. Формула для нахождения угловой скорости:
Нормальное ускорение
При равномерном движении по окружности, скорости v и ω остаются неизменными. Меняется только направление вектора линейной скорости.
При этом равномерное движение по окружности на тело действует центростремительное, или нормальное ускорение, направленное по радиусу окружности к ее центру.
a n = ∆ v → ∆ t , ∆ t → 0
Модуль центростремительного ускорения можно вычислить по формуле:
a n = v 2 R = ω 2 R
Докажем эти соотношения.
Рассмотрим, как изменяется вектор v → за малый промежуток времени ∆ t . ∆ v → = v B → — v A → .
В точках А и В вектор скорости направлен по касательной к окружности, при этом модули скоростей в обеих точках одинаковы.
По определению ускорения:
a → = ∆ v → ∆ t , ∆ t → 0
Взглянем на рисунок:
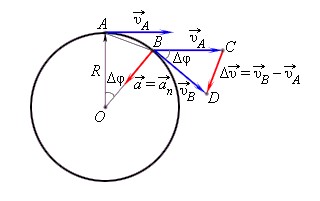
Треугольники OAB и BCD подобны. Из этого следует, что O A A B = B C C D .
Если значение угла ∆ φ мало, расстояние A B = ∆ s ≈ v · ∆ t . Принимая во внимание, что O A = R и C D = ∆ v для рассмотренных выше подобных треугольников получим:
R v ∆ t = v ∆ v или ∆ v ∆ t = v 2 R
При ∆ φ → 0 , направление вектора ∆ v → = v B → — v A → приближается к направлению на центр окружности. Принимая, что ∆ t → 0 , получаем:
a → = a n → = ∆ v → ∆ t ; ∆ t → 0 ; a n → = v 2 R .
При равномерном движении по окружности модуль ускорения остается постоянным, а направление вектора изменяется со временем, сохраняя ориентацию на центр окружности. Именно поэтому это ускорение называется центростремительным: вектор в любой момент времени направлен к центру окружности.
Запись центростремительного ускорения в векторной форме выглядит следующим образом:
Здесь R → — радиус вектор точки на окружности с началом в ее центре.
Тангенциальное ускорение
В общем случае ускорение при движении по окружности состоит из двух компонентов — нормальное, и тангенциальное.
Рассмотрим случай, когда тело движется по окружности неравномерно. Введем понятие тангенциального (касательного) ускорения. Его направление совпадает с направлением линейной скорости тела и в каждой точке окружности направлено по касательной к ней.
a τ = ∆ v τ ∆ t ; ∆ t → 0
Здесь ∆ v τ = v 2 — v 1 — изменение модуля скорости за промежуток ∆ t
Направление полного ускорения определяется векторной суммой нормального и тангенциального ускорений.
Движение по окружности в плоскости можно описывать при помощи двух координат: x и y. В каждый момент времени скорость тела можно разложить на составляющие v x и v y .
Если движение равномерное, величины v x и v y а также соответствующие координаты будут изменяться во времени по гармоническому закону с периодом T = 2 π R v = 2 π ω
http://helpiks.org/4-61053.html
http://zaochnik.com/spravochnik/fizika/kinematika/dvizhenie-po-okruzhnosti/