Уравнение движения груза на нити
В эксперименте исследуется вращательное движение закрепленной на оси системы тел, у которой может меняться момент инерции. Различные моменты внешних сил создается грузами, подвешенными на нити, намотанной на шкив.
Основное уравнение вращательного движения твердого тела с моментом инерции J вокруг неподвижной оси z имеет вид
 (1.1)
(1.1) — угловое ускорение, M — момент внешних сил.
— угловое ускорение, M — момент внешних сил.  Для экспериментального доказательства этого соотношения в работе используется маятник Обербека (рис.3). Он состоит из четырех стержней A и двух шкивов различного радиуса R1 и R2, укрепленных на одной горизонтальной оси. По стержням могут перемещаться и закрепляться в нужном положении четыре (по одному на каждом стержне) груза одинаковой массы m ‘ . При помощи груза массы m, прикрепленного к концу намотанной на тот или иной шкив нити, маятник может приводиться во вращение.
Для экспериментального доказательства этого соотношения в работе используется маятник Обербека (рис.3). Он состоит из четырех стержней A и двух шкивов различного радиуса R1 и R2, укрепленных на одной горизонтальной оси. По стержням могут перемещаться и закрепляться в нужном положении четыре (по одному на каждом стержне) груза одинаковой массы m ‘ . При помощи груза массы m, прикрепленного к концу намотанной на тот или иной шкив нити, маятник может приводиться во вращение. Пренебрегая силами трения и считая нить невесомой и нерастяжимой, можем написать: уравнение вращательного движения маятника
 (1.2)
(1.2) (1.3)
(1.3) (1.4)
(1.4)Из системы уравнений (1.2-1.4) следует, что груз m должен двигаться с постоянным ускорением
 (1.5)
(1.5)
 J можно записать, что M
J можно записать, что M  mgR.
mgR. Оценить величину момента сил трения можно, если предположить, что он остается неизменным во время движения. При опускании груза m c отметки x0 на полную длину нити до отметки x3 и затем при последующем подъеме до отметки x4 изменение его потенциальной энергии будет равно работе силы трения, то есть



 (1.6)
(1.6)Установка для изучения вращательного движения (рис.4) или AVI (15.3M) состоит из основания (1), вертикальной колонны (2) с закрепленными на ней двумя подвижными кронштейнами (3,4), на которых крепятся оптические датчики положения. На колонне закреплены два неподвижных кронштейна (5,6).
 На нижнем кронштейне (5) закреплен двухступенчатый вал (7). На верхнем кронштейне (6) закреплен подшипниковый узел (8) и блок (9). Через блок перекинута нить (10), один конец которой намотан на двухступенчатый вал (7), а на втором конце закреплен груз (11). На двухступенчатом валу крепятся тело маятника (12).
На нижнем кронштейне (5) закреплен двухступенчатый вал (7). На верхнем кронштейне (6) закреплен подшипниковый узел (8) и блок (9). Через блок перекинута нить (10), один конец которой намотан на двухступенчатый вал (7), а на втором конце закреплен груз (11). На двухступенчатом валу крепятся тело маятника (12).
Кронштейны с фотодатчиками могут крепиться на разной высоте. Расстояние между этими кронштейнами измеряется по шкале, нанесенной на колонне. Время движения грузов определяют с помощью электронного таймера. Запуск таймера осуществляется нажатием кнопки «Пуск», остановка — кнопкой «Стоп». При подготовке к дальнейшим измерениям результаты предыдущих измерений убираются с табло таймера нажатием кнопки «Сброс».
Упражнение 1. Проверка закона движения.
Из (1.2-1.4) следует, что вращение маятника Обербека происходит с постоянным угловым ускорением  , при этом груз m опускается с постоянным линейным ускорением a. Координата x груза, отпушенного без начальной скорости с отметки x0 меняется по закону (ось х системы координат направлена вниз (см. рис. 3))
, при этом груз m опускается с постоянным линейным ускорением a. Координата x груза, отпушенного без начальной скорости с отметки x0 меняется по закону (ось х системы координат направлена вниз (см. рис. 3))
 (1.7)
(1.7) t пролета груза между двумя отметками x1 и x2:
t пролета груза между двумя отметками x1 и x2: (1.8)t от
(1.8)t от  является линиейной и изображается на графике прямой линией.
является линиейной и изображается на графике прямой линией.- Установить максимальное расстояние между кронштейнами с фотодатчиками
- Установить грузы m ‘ в среднее положение, разместив их на равном расстоянии от оси таким образом, чтобы маятник находился в положении безразличного равновесия. Начало движения груза m всегда осуществляют от одного и того же положения x0, которое необходимо записать в рабочий журнал. Нить наматывают на вал большего диаметра виток к витку.
- Опустить груз m и произвести измерение времени
 t пролета груза m между фотодатчиками. Данные записать в таблицу 1.1 Провести измерения времени t для нескольких положений x1 верхнего датчика (рекомендуется менять x1 с шагом 5 см). Для каждого положения датчика измерения времени проводят не менее 3-х раз.
t пролета груза m между фотодатчиками. Данные записать в таблицу 1.1 Провести измерения времени t для нескольких положений x1 верхнего датчика (рекомендуется менять x1 с шагом 5 см). Для каждого положения датчика измерения времени проводят не менее 3-х раз. - Для 5-7 первых опытов измерить значения x4 — отметки, до которой поднимается груз при вращении маятника в одну сторону. Результаты занести в табл. 1.1.
- Определить значение x3 — максимальной отметки, до которой опускается груз m при своем движении.
Таблица 1.1
| N | x1i | x4 |  | tij | S |  |
| 1 | ||||||
| 2 | ||||||
| 3 | ||||||
| 4 | ||||||
| 5 | ||||||
| 6 | ||||||
| 7 | ||||||
| 8 | ||||||
| 9 | ||||||
| 10 | ||||||
| 11 | ||||||
| 12 | ||||||
| 13 | ||||||
| 14 | ||||||
| 15 |
Обработка результатов
- По экспериментальным данным для каждого положения фотодатчика x1 рассчитать среднее значение величины ti по формуле

- Вычислить ошибку измерения (выборочное стандартное отклонение)

- Построить зависимость t от , которая должна быть линиейной. Получившаяся линейная зависимость указывает на то, что движение тела является равнопеременным.
- Найти среднее значение и оценить величину по формуле (1.6). Убедиться в малости момента сил трения по сравнению с начальным моментом силы натяжения нити.
Упражнение 2. Проверка независимости инерционных свойств маятника (момента инерции) от момента внешних сил.
В данном упражнении экспериментально показывается, что инерционные свойства маятника, а именно — момент инерции — не зависят от момента внешних сил.
Из уравнения (1.2) имеем
 (1.9)
(1.9) (1.10)
(1.10)- Измерить штангенциркулем радиусы R1 и R2 шкивов, результаты, занести в рабочую тетрадь.
- Устаноновить максимальное расстояние между кронштейнами с фотодатчиками. Занести в рабочий журнал координаты фотодатчиков x1, x2 и значение x0.
- Установить грузы m ‘ в среднее положение, разместив их на равном расстоянии от оси таким образом, чтобы маятник находился в положении безразличного равновесия.
- На конец нити, намотанной на шкив радиуса R1, прикрепить груз массы m1 и измерить время прохождения груза между двумя фотодатчиками t. Одновременно измерить x4— отметку, до которой поднимается груз. Измерение провести 3 раза. и результаты внести в табл.1.2.
- Перебросить нить на другой шкив (радиуса R2). и измерить время t и значение x4 (3 раза). Результаты внести в табл. 1.2.
- Провести аналогичные измерения (п.4-п.5), прикрепив к концу нити груз массы m2. Результаты измерений занести в табл.1.2.
Таблица 1.2
| Комбинации значений радиусов шкивов и масс при измерениях | N | tij | x4 | , S | Ji , SJi | |
| R1 , m1 | 1 | |||||
| 2 | ||||||
| 3 | ||||||
| R2 , m1 | 4 | |||||
| 5 | ||||||
| 6 | ||||||
| R1 , m2 | 7 | |||||
| 8 | ||||||
| 9 | ||||||
| R2 , m2 | 10 | |||||
| 11 | ||||||
| 12 |
Обработка результатов
- По экспериментальным данным вычислить средние значения величин t и ошибки их измерений для четырех различных опытов. Результаты вычислений внесети в табл.1.2.
- Вычислить значения моментов инерции J1:J4 по формуле (1.10).
- Определить значение для каждого опыта.
- Найти отношение аналогично тому, как это было сделано в упр.1. Результаты внести в табл. 1.2.
- Произвести оценку погрешностей полученных результатов. В связи с тем, что экспериментальные значения Ji являются результатом косвенных измерений, то стандартное отклонение функции нескольких независимых переменных находится через ошибки прямых измерений по формуле для ошибки косвенных измерений.
- Проанализировать полученный результат. Для этого отметить значения моментов инерции J1:J4 с учетом погрешностей на числовых осях (рис.5), выбирая Ji=SJi. Пересечение этих областей будет указывать на выполнение соотношения (1.9) , что свидетельствеут о независимости инерционных свойств маятника от момента внешних сил.
 Проанализировать полученный результат. Для этого отметить значения моментов инерции J1:J4 с учетом погрешностей на числовых осях (рис.5), выбирая Ji=SJi. Пересечение этих областей будет указывать на выполнение соотношения (1.9) , что свидетельствеут о независимости инерционных свойств маятника от момента внешних сил.
Проанализировать полученный результат. Для этого отметить значения моментов инерции J1:J4 с учетом погрешностей на числовых осях (рис.5), выбирая Ji=SJi. Пересечение этих областей будет указывать на выполнение соотношения (1.9) , что свидетельствеут о независимости инерционных свойств маятника от момента внешних сил.Упражнение 3. Проверка основного уравнения вращательного движения и теоремы Гюйгенса-Штейнера.
Пусть J0 ‘ — суммарный момент инерции четырех грузов с массами M ‘ относительно осей, проходящих через их центры масс. При удалении центров грузов на расстояние l=l1, от оси вращения (см. рис. 3), согласно теореме Гюйгенса — Штейнера , момент инерции будет равен J1 ‘
 (1.11)
(1.11) (1.12)
(1.12) (1.13)
(1.13) (1.14)
(1.14) (1.15)
(1.15) (1.16)t1 , t2 — времена пролета груза между датчиками для случаев l=l1 и l=l2 соответственно.
(1.16)t1 , t2 — времена пролета груза между датчиками для случаев l=l1 и l=l2 соответственно. В это уравнение входят величины, определяемые экспериментально.
- На конец нити, намотанной на шкив радиуса R2 (большего по размеру), прикрепить груз наибольшей массы. Фотодатчики оставить в том же положении, что и в упражнении 2.
- Установить минимальное значение момента инерции маятника. Для этого грузы m ‘ установить в положение, наиболее близкое к оси. Измерить расстояние от грузов до оси. Занести это значение в табл 1.3.
- Определить величину t. — время прохождения груза m между двумя фотодатчиками и x4 — отметку, до которой он поднимается в процессе движения.Измерения проводят 3 раза. Результаты заносят в табл.1.3.
- Изменяя положение грузов m ‘ на стержнях с шагом 3 см, каждый раз измеряют время t. Результаты измерения и соответствующие им расстояния l от оси маятника до центров грузов записать в табл.1.3 . Одновременно для каждого опыта измеряют и заносят в табл. 1.3 значения величины x4 .
Таблица 1.3
| N | ( #tij ) | x4 | , S | ( ti ) 2 , S( ti ) 2 | l | l 2 | | |
| 1 | ||||||||
| 2 | ||||||||
| 3 | ||||||||
| . | ||||||||
Обработка результатов
- По экспериментальным данным для каждого положения грузов m ‘ найти средние значения величин ti.
- Вычислить погрешности измерения ti и ( ti) 2 .
- Построить график зависимости квадрата времени опускания груза ( ti) 2 . от l 2 , — это должна быть прямая линия.
- Проверить соотношение (1.16) для нескольких пар значений t 2 и l 2 .
- Для каждого момента инерции определить и отношение . Убедиться в выполнении приближения .
 .
.Основные итоги работы
В результате выполнения работы должна быть осуществлена экспериментальная проверка выполнения основного уравнения вращательного движения — уравнения моментов. Должны быть проверены соотношения (1.9) и (1.16) и установлена линейная (
t) 2 зависимость от l 2 .Контрольные вопросы
Что такое абсолютно твердое тело? Сколько степеней свободы имеет твердое тело? Сколько независимых скалярных уравнений требуется для описания движения твердого тела?
Почему угловая скорость является вектором? Куда направлен этот вектор?
Что такое момент силы относительно некоторой точки? Куда он направлен? Что такое момент силы относительно закрепленной оси?
Что такое момент импульса системы тел?
Что такое момент инерции тела относительно закрепленной оси?
Сформулируйте теорему Гюйгенса-Штейнера.
Как получить уравнение моментов и основное уравнение вращательного движения относительно закрепленной оси?
Литература
Матвеев А.Н. Механика и теория относительности. 2-е изд. М.: Высшая школа, 1986, § 31,32,34.
Сивухин Д.В. Общий курс физики. Том 1. Механика,3-е изд. M.: Наука.1989, § 30,35.
Движение связанных тел

Движение связанных тел
Задачи решаются применением законов Ньютона. Связанные тела представляют собой систему, движущуюся с некоторым ускорением. Так как тела связаны, то их ускорения равны. Сила натяжения одинакова на всем протяжении нити.
Возможные особенности задач:
В некоторых случаях удобно выбрать разные системы координат для разных тел.
Формулы для решения:
Законы Ньютона в векторной и скалярной формах:

Сила трения: 
Уравнения движения в векторной и скалярной формах:

Алгоритм решения типовой задачи:
1. Кратко записываем условие задачи.
2. Изображаем условие графически в произвольной системе отсчета, указав действующие на тело силы.
3. Корректируем и обозначаем на рисунке системы отсчета, вводя начало отсчета времени и уточняя оси координат для сил и ускорения. Мы говором системы отсчета, потому что для каждого тела может быть выбрана своя. Лучше направлять оси вдоль и перпендикулярно движению тел, а отсчет времени начинать в момент нахождения тел в нуле координат.
4. Записываем в векторной форме второй закон Ньютона, уравнения других необходимых законов и уравнения движения. Уравнения движения — это зависимости перемещения (пути) и скорости от времени.
5. Записываем эти уравнения в скалярной форме: в проекциях на оси координат.
6. Решаем уравнения в общем виде.
7. Подставляем величины в общее решение, вычисляем.
8. Записываем ответ.
К концам нити, перекинутой через неподвижный блок, подвешены два груза массами 90 г и 110 г. Первоначально они находятся на одном уровне. С каким ускорением движутся тела? На сколько опустится больший груз за 2 с?
1. Кратко записываем условие задачи.


2,3. Изображаем условие графически, указав действующие на тело силы. Обозначаем на рисунке систему отсчета. В данном случае достаточно одной оси.
4. Записываем в векторной форме второй закон Ньютона и уравнения движения.

5. Записываем эти уравнения в скалярной форме: в проекциях на оси координат.

6. Решаем уравнения в общем виде. Вычитаем первое уравнение из второго.

Подставляем в выражение для нахождения пройденного пути.

7. Подставляем величины в общее решение, вычисляем. Переведем данные в систему СИ.
90 г=0,09 кг; 110 г=0,11 кг.

8. Ответ: тела будут двигаться с ускорением 0,98 м/с2 и за две секунды пройдут 1,84 метра.
На концах нити, перекинутой через блок, подвешены тела разных масс. Под действием силы тяжести каждый из грузов проходит за 2 с после начала движения путь в 2 м. Определить массу меньшего груза, если масса большего равна 5 кг.
1. Кратко записываем условие задачи.


2,3 . Изображаем условие графически, указав действующие на тело силы. Обозначаем на рисунке систему отсчета. В данном случае достаточно одной оси.
4. Записываем в векторной форме второй закон Ньютона и уравнения движения.
5. Записываем эти уравнения в скалярной форме: в проекциях на оси координат.

6. Решаем уравнения в общем виде. Вычитаем второе уравнение из первого.

Из уравнения движения находим ускорение.

7. Подставляем величины в общее решение, вычисляем. Чтобы избежать громоздких выражений, сначала найдем ускорение, а затем подставим его численное значение в выражение для массы второго тела.

8. Ответ: масса второго тела 4,55 кг.
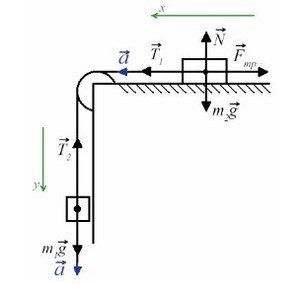
Тело массой 2 кг скользит по горизонтальной поверхности стола под действием груза массой 0,5 кг, прикрепленного к вертикальному концу шнура, привязанного к телу и перекинутого через неподвижный блок, закрепленный на краю. С каким ускорением движется тело? Трение не учитывать.
1. Кратко записываем условие задачи.


2. Изображаем условие графически. Обозначаем на рисунке силы, действующие на каждое из тел и их ускорения.

3. Корректируем и обозначаем на рисунке систему отсчета, вводя начало отсчета времени и уточняя оси координат для силы и ускорения. Положительное направление по оси ординат выбираем вниз, для оси абсцисс — вправо.
4. Записываем в векторной форме второй закон Ньютона для каждого из тел

Тела связаны нитью, поэтому абсолютные величины их ускорений равны. 
5. Записываем эти же уравнения в скалярной форме: в проекциях на оси координат.
Для первого тела:
На ось «X». 
Так как силы, действующие на первое тело и его ускорение перпендикулярны оси «Y», то их проекции на эту ось равны нулю, и мы их не записываем.
Для второго тела.
Так как силы, действующие на второе тело и его ускорение перпендикулярны оси «X», то их проекции на эту ось равны нулю, и мы их не записываем.
На ось «Y». 
6. Решаем уравнения в общем виде. Учитываем, что в данном случае проекции на оси численно равны длинам векторов, груз на столе движется именно силой натяжения нити, а ко второму грузу приложена сила тяжести, то есть

получаем систему уравнений:

Откуда: 
Складываем два уравнения, получаем:

7. Подставляем величины в общее решение, вычисляем.

8. Ответ: Ускорение тела 1,96 м/с2.
На горизонтальном столе лежит деревянный брусок массой 500 г, который приводится в движение грузом массой 300 г, подвешенным на вертикальном конце нити, перекинутой через блок, закрепленный на конце стола. Коэффициент трения при движении бруска равен 0,2. С каким ускорением будет двигаться брусок?
1. Кратко записываем условие задачи.


2. Изображаем условие графически, указав действующие на тела силы.

3. Обозначаем на рисунке систему отсчета. Одну из осей направляем вдоль нормальной реакции опоры.
4. Записываем в векторной форме второй закон Ньютона и уравнения движения для каждого из тел.
 Где R1 и R2 — равнодействующие сил, действующих на каждое тело.
Где R1 и R2 — равнодействующие сил, действующих на каждое тело.
5. Записываем эти же уравнения в скалярной форме: в проекциях на оси координат. Записываем выражение для силы трения.

Учитываем, что некоторые проекции обращаются в ноль, а другие равны длинам векторов. Ускорения обоих тел равны, так как они связаны.

F2 — это сила тяжести, равная mg. F1 — сила натяжения нити, то есть T.
6. Решаем уравнения в общем виде.

Подставляем выражение для силы трения в первое уравнение.

Сложим два уравнения:

7. Подставляем величины в общее решение, вычисляем.

8. Ответ: Ускорение грузов равно 2,45 м/с2.
На вершине наклонной плоскости находится неподвижный блок, через который переброшена невесомая нить с двумя брусками массами 3 и 2 кг. Брусок массой 3 кг, лежащий на наклонной плоскости начинает двигаться вверх без трения и за 2 с проходит путь в 2 м. Определить угол наклона.
1. Кратко записываем условие задачи.


2. Изображаем условие графически, указав действующие на тела силы.

3. Обозначаем на рисунке системы отсчета. Для каждого тела выбираем свою. В первой системе направляем одну ось вдоль наклонной плоскости, вторую — перпендикулярно ей. Во второй системе достаточно ввести одну ось вдоль движения.
4. Записываем в векторной форме второй закон Ньютона для каждого тела и уравнение движения для первого тела.

5. Записываем эти же уравнения в проекциях на оси координат. Учитываем сразу, что некоторые проекции обращаются в ноль. Мы полагаем, что натяжение в разных местах нити одинаковое, а ускорения грузов равны, так как грузы связаны между собой.

6. Решаем уравнения в общем виде. Складываем два первых уравнения, а из третьего сразу находим ускорение.

Из первого уравнения находим синус угла, подставляем в него выражение для ускорения.

7. Подставляем величины в общее решение, вычисляем.
Уравнение движения груза на нити
Динамика: движения системы связанных тел.
Проецирование сил нескольких объектов.
Действие второго закона Ньютона на тела, которые скреплены нитью
Если ты, дружок, позабыл, как силушку проецировать, советую мыслишки в своей головушке освежить.
А для тех, кто все помнит, поехали!
Задача 1. На гладком столе лежат два связанных невесомой и нерастяжимой ниткой бруска с массой 200 г левого и массой правого 300 г. К первому приложена сила 0,1 Н, к левому — в противоположном направлении сила 0,6 Н. С каким ускорением движутся грузы?
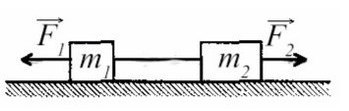
Движение происходит только на оси X.
Т.к. к правому грузу приложена большая сила, движение данной системы будет направлено вправо, поэтому направим ось так же. Ускорение у обоих брусков будет направлено в одну сторону — сторону большей силы.
По II з. Ньютона спроецируем силы обоих тел на Ох:
Сложим верхнее и нижнее уравнение. Во всех задачах, если нет каких-то условий сила натяжения у разных тел одинакова T ₁ и Т ₂.
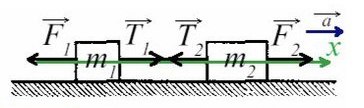
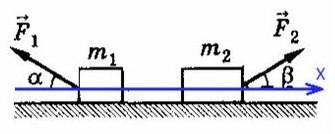
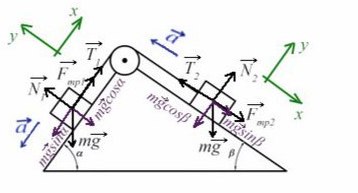
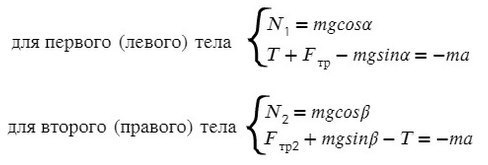
Задача 2. Два бруска, связанные нерастяжимой нитью, находятся на горизонтальной плоскости. К ним приложены силы F₁ и F₂, составляющие с горизонтом углы α и β. Найти ускорение системы и силу натяжения нити. Коэффициенты трения брусков о плоскость одинаковы и равны μ. Силы F₁ и F₂ меньше силы тяжести брусков. Система движется влево. 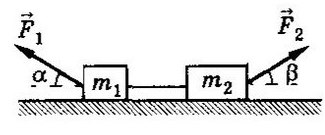
Cистема движется влево, однако ось можно направить в любую сторону (дело лишь в знаках, можете поэксперментировать на досуге). Для разнообразия направим вправо, против движения всей системы, мы же любим минусы! Спроецируем силы на Ох (если с этим сложности — вам сюда ).
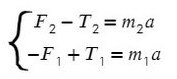
По II з. Ньютона спроецируем силы обоих тел на Ох:
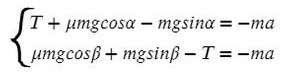
Сложим уравнения и выразим ускорение:

Выразим натяжение нити. Для этого приравняем ускорение из обоих уравнений системы:


Задача 3 . Через неподивжный блок перекинуты нить, к которой подвешены три одинаковых груза (два с одной стороны и один с другой) массой 5 кг каждый. Найти ускорение системы. Какой путь пройдут грузы за первые 4 с движения?
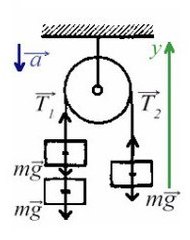
В данной задаче можно представить, что два левых груза скреплены вместе без нити, это избавит нас от проецирования взаимно равных сил.
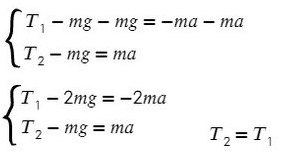
Вычтем из первого уравнения второе:
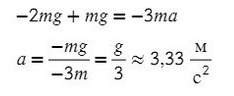
Зная ускорение и то, что начальная скорость равна нулю, используем формулу пути для равноускоренного движения:

Задача 4. Два груза массами 4 кг и 6 кг соединены легкой нерастяжимой нитью. Коэффициенты трения между грузом и столом μ = 0,2. Определите ускорение, с которым будут двигаться грузы.
Запишем движение тел на оси, из Oy найдем N для силы трения (Fтр = μN):
(Если сложно понять, какие уравнения понадобятся для решения задачи, лучше запишите все)
Сложим два нижних уравнения для того, чтобы T сократилось:


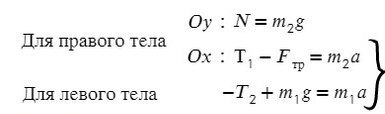
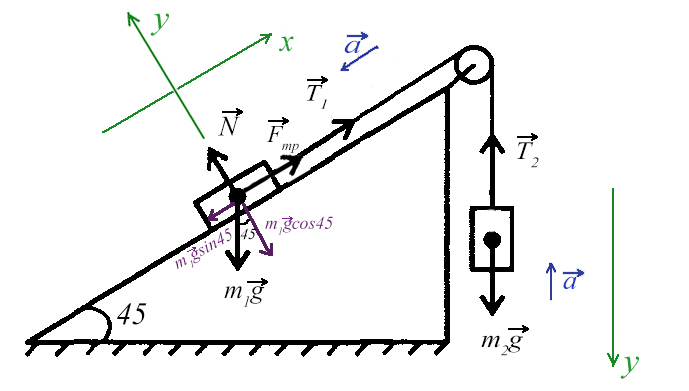
Задача 5. На наклонной поскости с углом наклона 45° лежит брускок массой 6 кг. Груз массой 4 кг присоединен к бруску при помощи нити и перекинут через блок. Определите натяжение нити, если коэффициент трения бруска о плоскость μ = 0,02. При каких значениях μ система будет в равновесии?
Ось направим произвольно и предположим, что правый груз перевешивает левый и поднимает его вверх по наклонной плоскости.
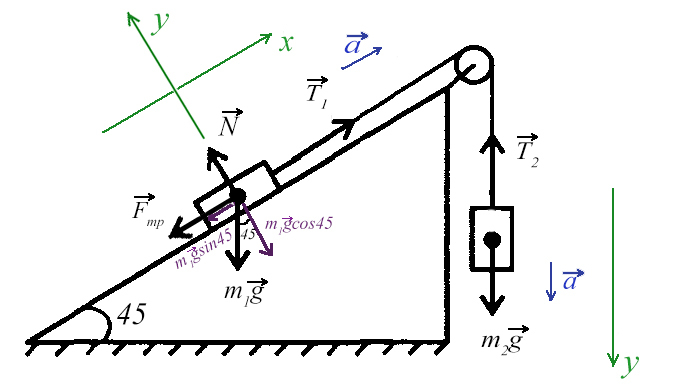
Из уравнения на ось Y выразим N для силы трения на ось Х (Fтр = μN):
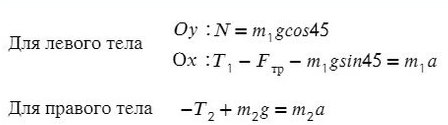
Решим систему, взяв уравнение для левого тела по оси Х и для правого тела по оси Y:
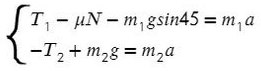
Выразим ускорение, чтобы осталась одна неизвестная T, и найдем ее:




Система будет в равновесии. Это означает, что сумма всех сил, действующих на каждое из тел, будет равна нулю:
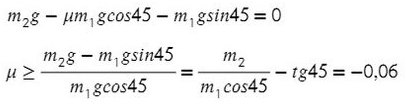
Получили отрицательный коэффициент трения, значит, движение системы мы выбрали неверно (ускорение, силу трения). Можно это проверить, подставив силу натяжения нити Т в любое уравнение и найдя ускорение. Но ничего страшного, значения остаются теми же по модулю, но противоположными по направлению.
Значит, правильное направление сил должно выглядить так, а коэффициент трения, при котором система будет в равновесии, равен 0,06.
Задача 6. На двух наклонных плоскостях находится по грузу массами 1 кг. Угол между горизонталью и плоскостями равен α = 45° и β = 30°. Коэффициент трения у обеих плоскостей μ = 0,1. Найдите ускорение, с которым движутся грузы, и силу натяжения нити. Каким должно быть отношение масс грузов, чтобы они находились в равновесии.
В данной задаче уже потребуются все уравнения на обе оси для каждого тела:
Найдем N в обоих случаях, подставим их в силу трения и запишем вместе уравнения для оси Х обоих тел:
Сложим уравнения и сократим на массу:


Подставив в любое уравнение найденное ускорение, найдем Т:
 А теперь одолеем последний пункт и разберемся с соотношением масс. Сумма всех сил, действующих на любое из тел, равна нулю для того, чтобы система находилась в равновесии:
А теперь одолеем последний пункт и разберемся с соотношением масс. Сумма всех сил, действующих на любое из тел, равна нулю для того, чтобы система находилась в равновесии:


Все, что с одной массой, перенесем в одну часть, все остальное — в другую часть уравнения:

Получили, что отношение масс должно быть таким:
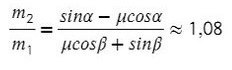
Однако, если мы предположим, что система может двигаться в другом направлении, то есть правый груз будет перевешивать левый, направление ускорения и силы трения изменится. Уравнения останутся такими же, а вот знаки будут другими, и тогда отношение масс получится таким:
Тогда при соотношении масс от 1,08 до 1,88 система будет находиться в покое.
У многих может сложиться впечатление, что соотношение масс должно быть каким-то конкретным значением, а не промежутком. Это правда, если отстутвует сила трения. Чтобы уравновешивать силы тяжести под разными углами, найдется только один варинт, когда система находится в покое.
В данном же случае сила трения дает диапазон, в котором, пока сила трения не будет преодолена, движения не начнется.
http://pandia.ru/text/80/296/10557.php
http://ik-study.ru/ege_po_fizikie/sistiemy_sviazannykh_tiel_